


Fatores-chave no projeto do controle eletrônico de velocidade de um drone
A chave para o design de um drone é a capacidade de controlar a velocidade e rotação do motor. A maioria dos drones são movidos por motores DC sem escovas, que requerem regulagem constante de velocidade e direção de rotação. Um módulo de controle eletrônico de velocidade (ESC) executa essas funções e inclui um estágio de fonte de alimentação, um circuito de detecção de corrente, um microcontrolador e uma interface de comunicação com o sistema de controle de vôo, tornando-o fundamental para drones. Este artigo analisa os elementos importantes a serem considerados ao projetar um ESC, bem como as soluções de desenvolvimento do mercado.
Controle do motor
O projeto de um ESC requer uma avaliação cuidadosa e análise das características que podem ser resumidas da seguinte forma:
- Bateria instalada no drone
- motores
- Orçamento disponível
- Compatibilidade eletromagnética (EMC) e imunidade a interferências
Dois tipos de motores sem escovas podem ser instalados em drones:motores de corrente contínua sem escovas (BLDCs) e motores de corrente alternada sem escovas (BLACs), também conhecidos como motores síncronos de ímã permanente (PMSMs). A escolha do tipo de motor a ser usado é influenciada pelo algoritmo de controle escolhido, que pode ser controle trapezoidal ou controle orientado a campo (FOC). O algoritmo de controle do motor trapezoidal tem as seguintes características principais:
- Controle do motor com base em uma sequência de comutação de seis fases
- Detecção do ângulo magnético do rotor, utilizado para definir o ângulo correto; cada etapa corresponde a um ângulo de 60 °
- Em sistemas de controle sem sensores, o ângulo de comutação é estimado medindo a tensão de fase de EMF traseira
O algoritmo de controle FOC, por outro lado, possui os seguintes recursos:
- Controle do motor por meio de tensões ou correntes de fase senoidais (FOC)
- Detecção do ângulo do rotor com uma precisão mínima de 1 ° a 5 °, o que garante que o algoritmo seja sempre capaz de fornecer o torque máximo
Em sistemas de controle sem sensores, o ângulo magnético do motor é estimado a partir das tensões e correntes de fase do motor. Sua posição é determinada monitorando certos parâmetros elétricos do motor e sem o uso de sensores adicionais. O tipo mais comum usado em drones é o motor DC sem escova devido ao seu tamanho pequeno, custo relativamente baixo e alta durabilidade e robustez.
A maioria dos drones tem pelo menos quatro motores, sendo a versão de quatro motores a mais usada. O ESC é responsável por controlar a velocidade de cada motor e, portanto, a arquitetura de drones mais comum envolve o uso dedicado de um ESC para cada motor. Todos os ESCs devem ser capazes de se comunicar entre si, direta ou indiretamente, através do controlador de vôo, de modo a ter fácil controle do drone. A direção de rotação de cada motor também é importante:em um quadricóptero, um par de motores gira em uma direção, enquanto o outro gira na direção oposta.
A técnica de controle do motor mais comumente usada pelos fabricantes de ESC é o controle orientado para o campo, uma técnica que controla o torque e a velocidade do motor. Quando implementado corretamente, o FOC pode controlar até mesmo mudanças rápidas de aceleração sem gerar instabilidade, permitindo que o drone execute manobras complexas enquanto maximiza a eficiência.
O diagrama de blocos na Figura 1 abaixo mostra uma arquitetura FOC que inclui os seguintes componentes:
- Controlador de corrente que consiste em dois controladores proporcionais integrais
- Controlador de velocidade de loop externo opcional e gerador de corrente de referência
- Clarke, Park e transformações inverse Park para conversão de quadros síncronos estacionários em rotativos
- Um algoritmo de modulador de vetor espacial para transformar os comandos vα e vβ em sinais de modulação por largura de pulso aplicados aos enrolamentos do estator
- Funções de proteção e auxiliares, incluindo lógica de inicialização e desligamento
- Observador opcional para estimar a posição angular do rotor se o controle sem sensores for desejado
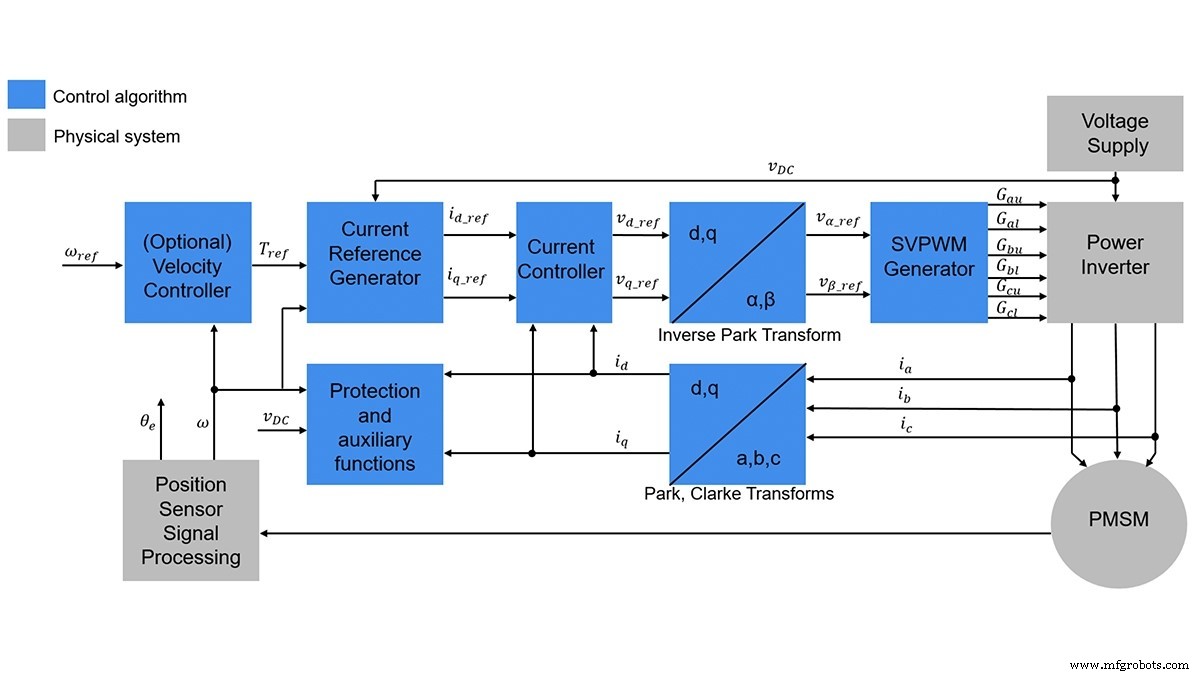
Figura 1. Diagrama de blocos do controle orientado a campo (Fonte:Mathworks)
Os engenheiros de controle de motor que projetam um FOC realizam várias tarefas, incluindo o desenvolvimento da arquitetura do controlador com dois controladores PI para o loop de corrente, otimizando todos os ganhos dos controladores PI para atender aos requisitos de desempenho e projetando um modulador de vetor espacial para controlar o PWM.
Uma vez que o algoritmo de controle é escolhido (trapezoidal ou FOC), o próximo passo é escolher entre um sistema de controle em malha aberta ou fechada. No controle de malha aberta, o motor síncrono (BLDC ou BLAC) é acionado por meio de um sinal de controle e assume-se que segue a ação de controle comandada. No sistema de controle de malha fechada, o circuito é capaz de verificar se o motor está se movendo como pretendido. Se não estiver, o sistema de controle compensa automaticamente o excesso ou falta de movimento reduzindo ou aumentando a corrente.
Ao usar um sistema de controle de malha fechada ou malha aberta (sem sensores), as correntes e tensões devem ser medidas para serem usadas como sinais de feedback. A Figura 2 mostra uma configuração de medição típica, adequada para sistemas de controle trapezoidal e sinusoidal. Usando o controle trapezoidal com um algoritmo sem sensor, as tensões trifásicas são usadas pelo algoritmo sem sensor para calcular o ângulo do rotor.
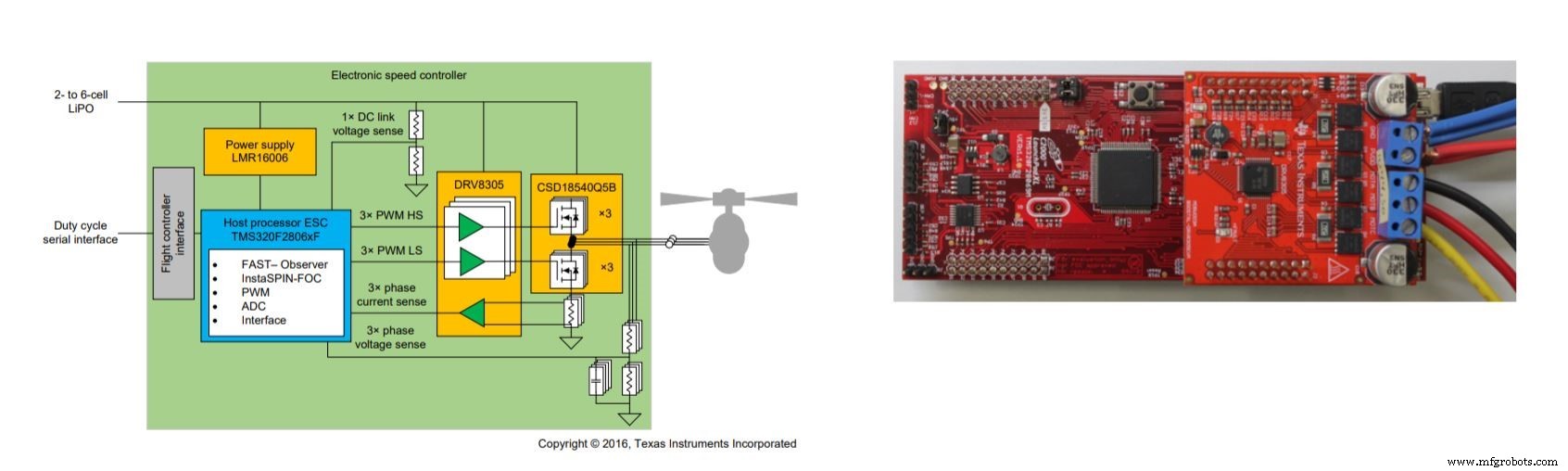
Figura 2. ESC com controle de motor sensorless. À direita está o projeto de referência FOC Sensorless de alta velocidade para Drone ESCs da Texas Instruments, e à esquerda está seu diagrama de blocos. (Fonte:Texas Instruments)
Dinâmica de quadricóptero
A simplicidade mecânica e a estabilidade aerodinâmica dos drones estão ligadas ao uso coordenado de motores e suas manobras. Em um quadricóptero, o par de motores posicionados na diagonal da estrutura gira na mesma direção, mas na direção oposta aos outros dois motores. Se todos os quatro motores girarem na mesma velocidade, o drone pode subir, descer ou permanecer em vôo nivelado. Se o par diagonal virar mais rápido que o outro, o drone gira em torno de seu centro de gravidade e permanece no mesmo plano horizontal (Figura 3).
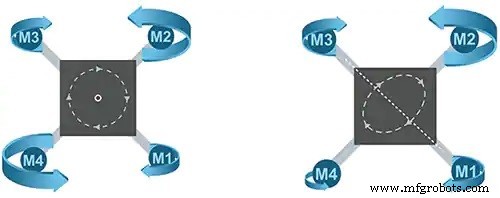
Figura 3. Os drones usam diferentes combinações de velocidades do rotor para realizar as manobras. (Fonte:STMicroelectronics)
Se você alterar a velocidade do rotor da cabeça (ou cauda), o drone apontará para cima ou para baixo como uma aeronave de asa fixa mergulhando. O ajuste de torque à esquerda ou à direita fará com que o drone gire, girando em torno de seu eixo. Cabe ao sistema de controle de voo do drone alterar a velocidade do rotor apropriada para atingir a altitude de voo necessária para completar a manobra desejada.
Para um engenheiro de controle, a correção de velocidade é um problema comum de feedback da malha de controle que é resolvido com um controlador proporcional, integral e derivativo (PID).
Projetando um ESC
Projetar um ESC para drones requer componentes de alta qualidade projetados especificamente para controlar motores de alta RPM (12.000+ RPM). A Texas Instruments desenvolveu uma família de MCUs, chamada InstaSPIN, que simplifica o projeto de aplicações de controle de motor trifásico. O InstaSPIN-FOC, adequado para sistemas sem sensor, possui um codificador de software rápido com controle de torque e velocidade adequado para qualquer motor trifásico. O InstaSPIN-MOTION destina-se a sistemas sem sensores e fornece controle de posição, velocidade e torque para qualquer motor trifásico.
Um projeto de referência completo para esses osciloscópios é fornecido pela TI e consiste nas tecnologias de controle de motor InstaSPIN-FOC e InstaSPIN-MOTION. A plataforma inclui um microcontrolador TI C2000 InstaSPIN de 32 bits. Ele permite que os desenvolvedores identifiquem, ajustem automaticamente e controlem um motor trifásico, fornecendo rapidamente um sistema de controle de motor estável e funcional.
STMicroelectronics oferece um design de referência ESC completo, implementando um algoritmo FOC sem sensor. O design de referência STEVAL-ESC001V1 ESC é adequado para designs de drones comerciais de nível básico e aciona qualquer motor sem escova trifásico (ou PMSM) alimentado por baterias 6S LiPo ou qualquer fonte de alimentação DC equivalente, corrente de pico de até 30 A. STEVAL-ESC001V1 permite que os designers desenvolvam rapidamente sua aplicação graças a um pacote de firmware pré-configurado completo (STSW-ESC001V1), implementando um algoritmo controlado orientado a campo sem sensores com leitura de corrente de três shunt, controle de velocidade e frenagem totalmente ativa. O pacote de firmware / software STSW-ESC001V1 mais a biblioteca MC do kit de desenvolvimento de software STM32 PMSM FOC permite otimizar o projeto ESC agindo nos parâmetros FOC incorporados em um MCU STM32 e explora o perfilador de motor ST para recuperar rapidamente os parâmetros relevantes do motor. O algoritmo FOC sem sensor da ST pode ser adaptado a qualquer aplicação de motor BLDC ou PMSM trifásico, proporcionando tempos de voo mais longos e desempenho dinâmico ideal (Figuras 4 e 5).
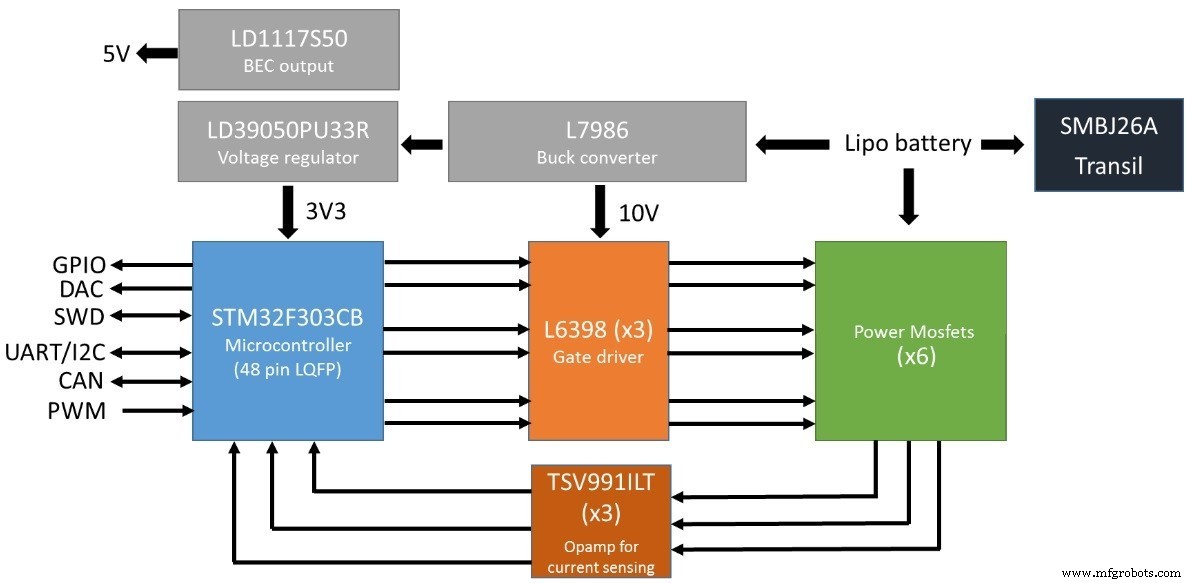
Figura 4. Diagrama de blocos da solução ST STEVAL-ESC001V1 (Fonte:STMicroelectronics)
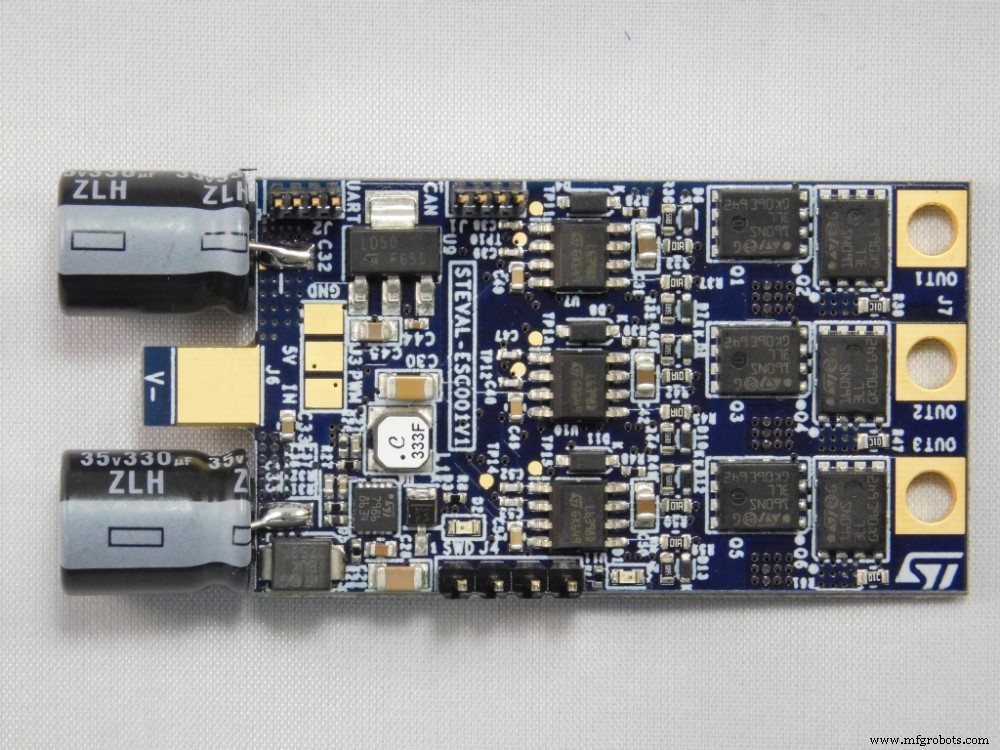
Figura 5. Placa ST STEVAL-ESC001V1 (Fonte:STMicroelectronics)
A plataforma de desenvolvimento de drones HoverGames é uma solução de hardware / software NXP modular e flexível que pode ser usada para construir qualquer veículo autônomo, de drones e rovers a UAVs. O kit de desenvolvimento é essencialmente baseado em um microprocessador com Linux e Open CV e vários sensores que o acompanham para guiar o vôo.
O controlador de vôo garante que o drone permaneça estável. A placa é open-source com a possibilidade de inserir outros sensores externos para otimizar as operações de acordo com a funcionalidade.
Uma bateria LiPo e um rádio de telemetria específico do país devem ser implementados usando uma das conexões IoT. Para obter uma funcionalidade completa do kit, você precisará selecionar qual dos dois rádios de telemetria disponíveis comprar. Por meio da telemetria, você pode ter uma conexão ao vivo com o veículo durante o vôo e pode ver o status do drone durante o vôo, carregar e controlar waypoints autônomos e fazer as alterações necessárias. Os dados de telemetria são enviados para a estação de controle, mas também armazenados a bordo na unidade de vôo.
Os componentes do kit também incluem módulo de alimentação DC para DC, módulo GPS NEO-M8N com montagem, interruptor de segurança, campainha, LED RGB brilhante, cabo SEGGER J-Link EDU Mini / FTDI USB-TTL-3V3 / placa de depuração com cabo , Motores sem escova BLDC 2212 920 kV e controladores de motor ESC 40 A OPTO (Figura 6).
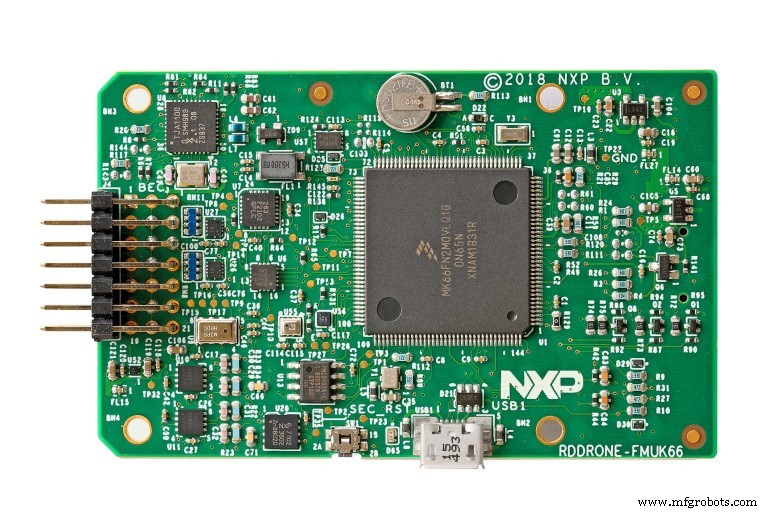
Figura 6. Unidade de voo RDDRONE-FMUK66 (Fonte:NXP)
>> Este artigo foi publicado originalmente em nosso site irmão, Power Electronics News.
Conteúdos Relacionados:
- Projetando controladores eletrônicos de velocidade para drones
- Os drones continuam avançando em soluções de carregamento sem fio
- O sensor LiDAR é compatível com imagens de alta resolução em UAVs
- Os kits de desenvolvimento oferecem plataformas para projetos de controle de motor e energia digital
- Projetando controles de motor para sistemas robóticos
- A fusão de sensores traz vários benefícios
Para obter mais informações sobre o Embedded, assine o boletim informativo semanal por e-mail da Embedded.
Integrado
- Circuitos permissivos e de bloqueio
- Renesas expande opções de microcontrolador para controle de servo em robôs industriais
- Projetando controles de motor para sistemas robóticos
- O controlador do motor integra o núcleo Arm Cortex-M0
- O controle de qualidade é a primeira etapa para a confiabilidade do motor
- Controle de tensão no manuseio da web – componentes-chave
- Compressores VSD integrados:8 principais vantagens
- O que determina a velocidade de um motor hidráulico
- Como você controla a velocidade de um motor hidráulico?
- O que determina a velocidade de um motor hidráulico?