


Suavizando o desempenho do trem de força EV com um algoritmo de controle orientado para o campo
Os motores de alto desempenho precisam de um mecanismo de controle que garanta suavidade, confiabilidade e eficiência aprimoradas. Um dos exemplos mais aptos de tal aplicação é o motor usado no trem de força de veículos elétricos (EV), que pode ser controlado por um sistema baseado em controle orientado para o campo (FOC).
Para um trem de força EV operar suavemente, o esquema de controle deve ser tal que o motor seja capaz de operar em uma ampla faixa de velocidade e produzir torque máximo nas velocidades mais baixas. Tecnicamente falando, o controle do motor deve ser baseado no torque e no fluxo magnético, para que possamos controlar o torque com precisão controlando a corrente.
O princípio básico de girar o rotor de um motor é produzir um campo magnético no estator. Isso é feito energizando as bobinas do estator com corrente alternada. O segredo para o bom funcionamento de um motor está em saber a posição do rotor, que é o ângulo entre o eixo de fluxo do rotor e o eixo magnético do estator. Uma vez que este valor é conhecido, a corrente do estator é alinhada com o eixo de torque do rotor. Para atingir a eficiência máxima, o fluxo magnético do estator deve ser perpendicular ao fluxo magnético do rotor.
Controle de motor baseado em FOC
No papel, um sistema de controle motor baseado em controle orientado a campo (FOC) típico aparece como mostrado na Figura 1.
clique para imagem em tamanho real
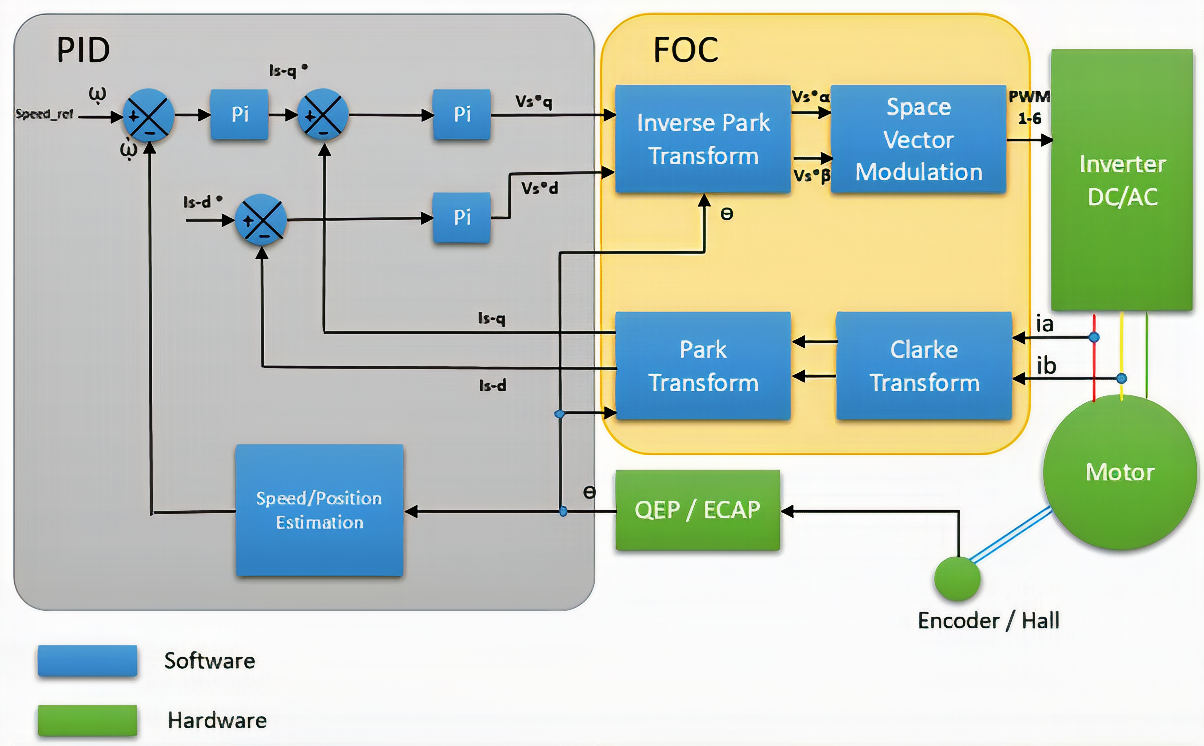
Figura 1:O diagrama mostra os componentes de hardware e software de um sistema de controle de motor baseado em FOC. Fonte:Texas Instruments
Vamos entender cada um dos componentes de software e hardware:
- Inversor trifásico :Um inversor trifásico CA / CC fornece a tensão trifásica ao motor PMSM / BLDC para o inversor. Recebe sinais de modulação por largura de pulso (PWM) do bloco de modulação de vetor espacial (SVM).
- interface QEP :Faz interface com um codificador para obter a posição mecânica do rotor e passá-la para outros blocos.
- Bloco de estimativa de velocidade / posição :Como o nome sugere, os cálculos para obter a posição e velocidade do rotor são realizados neste bloco.
- Controle PID :A derivada integral proporcional (PID) é uma malha de controle que depende do feedback do motor na forma de torque. Calculando a diferença entre o torque desejado e o torque recebido do bloco de transformação Park, ele faz a correção.
- Transformação de Clarke :O bloco de transformação de Clarke converte a corrente do estator (ia, ib) em sistema de coordenadas de fluxo e torque (d-q) usando a fórmula de transformação de Clarke. O referencial estacionário de um sistema trifásico é transformado em um sistema de dois quadrantes em um referencial estacionário.
- Park transform e inverse Park transform :Este bloco converte o referencial estacionário em referencial rotativo com um sistema bifásico com eixos ortogonais. Os componentes ortogonais são d-q, que são o eixo direto do motor e o eixo da quadratura, respectivamente. O bloco inverso da transformação Park surge quando a tensão de saída do estator tem que ser convertida de volta para a referência de quadro estacionário (referência do estator).
- Modulação do vetor espacial :É uma técnica para determinar o sinal PWM que deve ser aplicado ao motor. O SVM usa o vetor de tensão do estator como entrada e produz a tensão de saída trifásica como saída.
A seguir, exploraremos como esses componentes são colocados em uso na condução de um motor usando o algoritmo FOC.
Uma visão do fluxo de trabalho FOC
Para que um motor elétrico trifásico seja controlado, temos que fornecer a tensão adequada ao motor lendo a corrente de fase Ia, Ib, Ic. Sem ter um controle sobre eles, não é possível criar um vetor de fluxo do estator, que está a 90 graus do vetor de fluxo do rotor.
O FOC é um algoritmo de matemática intensiva que ajuda a conseguir isso e mais facilmente, embora o desenvolvimento do FOC seja bastante complexo. O algoritmo FOC é capaz de simplificar o controle de referenciais de correntes sinusoidais trifásicas, decompondo-os em referenciais de fluxo e torque (d-q). Esses dois componentes podem ser controlados separadamente.
A Figura 1 mostra o encoder / Hall que determina a posição do rotor e passa para o bloco velocidade / posição. Este valor também é alimentado para o bloco de transformação Park e inverse Park. Na mesma instância, as correntes de fase (ia, ib) do motor são alimentadas para o bloco de transformação de Clarke. As correntes de fase do motor são convertidas pela transformada de Clarke em duas correntes ortogonais (iα, iβ). As correntes de fase recém-convertidas agora significam correntes produtoras de torque e produtoras de fluxo, respectivamente. Embora tenhamos decomposto com sucesso a corrente de fase em componentes de fluxo e torque, eles ainda são senoidais, o que torna difícil de controlar à medida que continuam mudando.
A próxima tarefa do algoritmo FOC é eliminar as ondas senoidais, que requerem uma entrada importante - a posição do rotor. Vemos no diagrama que esse valor também é alimentado para o bloco de transformação Park. Neste bloco, o truque é mover de um quadro de referência estacionário - do ponto de vista do estator - para um quadro de referência rotativo do ponto de vista do rotor. Falando de maneira simples, o bloco de transformação Park converte as duas correntes CA (iα, iβ) em correntes CC. Isso torna muito fácil para o bloco PID controlá-lo da maneira que desejar.
Vamos trazer o bloco PID para a imagem agora. A entrada para o bloco PID do bloco FOC é Iq e Id, componente de torque e fluxo. No contexto de um EV, o bloco PID receberá uma referência de velocidade quando o driver operar o acelerador. O bloco PID agora compara os dois valores e calcula o erro. Este erro é o valor para o qual o bloco PID deve girar o motor. A saída que o bloco PID fornece é Vq e Vd. Essa saída atinge a transformação de Clarke e Park inversa, onde ocorre o oposto exato da transformação de Clarke e Park. O bloco inverso de transformação Park transforma o referencial rotativo em referencial estacionário, de forma que suas fases de motores possam ser comutadas.
clique para imagem em tamanho real
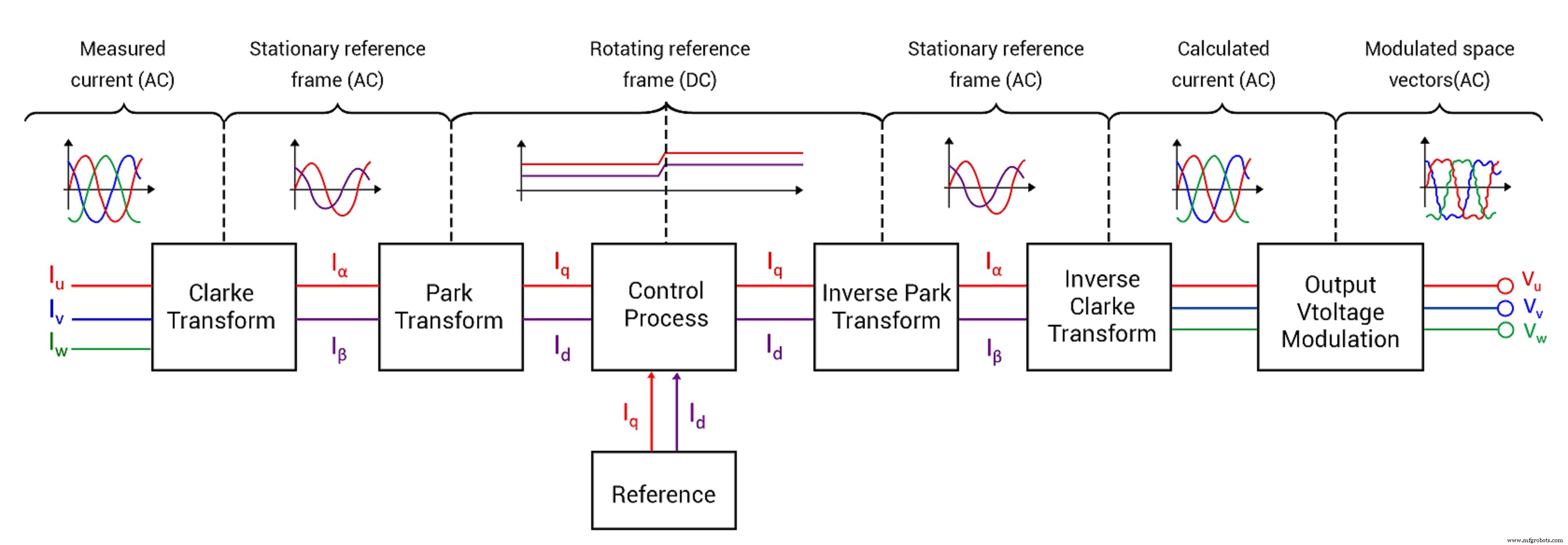
Figura 2:A saída do PID atinge a transformação inversa de Clarke e Park, onde ocorre o oposto exato da transformação de Clarke e Park. Fonte:Texas Instruments
Na última etapa do controle do motor baseado no algoritmo FOC, o papel da modulação do vetor espacial (SVM) assume muita importância. O papel do SVM é gerar os sinais PWM que são alimentados no inversor que, por sua vez, gera a tensão trifásica que aciona o motor. De certa forma, o SVM também faz o trabalho de uma transformação de Clarke inversa.
Um inversor trifásico tem seis transistores que fornecem a tensão de saída para o motor. Existem essencialmente dois estados em que essas saídas devem estar com o transistor superior fechado e o inferior aberto ou vice-versa. Com dois estados e três saídas, total de oito estados (2
3
) pode ser calculado. Quando você plota esses oito estados, também chamados de vetores de base, em um diagrama de estrela hexagonal, você descobrirá que cada vetor adjacente tem 60 graus de diferença em termos de diferença de fase. O SVM encontra o vetor médio que fornece a tensão de saída (V out )
Controle de motor EV de fato
O FOC como um esquema de controle do motor é indispensável para projetos de EV. Com o tipo de operação de motor silenciosa e suave exigida por um EV, o FOC se destaca como um bom ajuste. Muitos OEMs e desenvolvedores de sistema de controle costumam ajustar o algoritmo FOC padrão para atender aos requisitos exclusivos de seu programa EV, mas o conceito central permanece o mesmo.
Os avanços em MCUs automotivos, como a família PIC18Fxx39 de microcontroladores da Microchip ou os microcontroladores em tempo real C2000 da TI, são capazes de acelerar o desenvolvimento de um algoritmo FOC para sistemas de controle de motor EV.
>> Este artigo foi publicado originalmente em nosso site irmão, EDN .
 Vaibhav Anand é executivo de marketing digital da Embitel.
Vaibhav Anand é executivo de marketing digital da Embitel.  Saurabh S. Khobe é um engenheiro integrado na Embitel.
Saurabh S. Khobe é um engenheiro integrado na Embitel. Conteúdos Relacionados:
- Resolvendo desafios de projeto de controle de motor multi-eixo determinístico
- Controlando com segurança um inversor de tração EV
- Soluções emergentes aprimoram o gerenciamento de energia de veículos elétricos
- Identificação de requisitos para desenvolvimento de E / E
- O controlador do motor integra o núcleo Arm Cortex-M0
Para obter mais informações sobre o Embedded, assine o boletim informativo semanal da Embedded por e-mail.
Integrado
- Circuitos permissivos e de bloqueio
- Circuitos de controle do motor
- O pacote de software simplifica os projetos de controle do motor
- MÓDULO DE DADOS:Tela TFT ultra-esticada de 23,1 ”com controle inteligente
- Maxim:amplificador bidirecional de detecção de corrente com rejeição PWM
- O controlador do motor integra o núcleo Arm Cortex-M0
- Lanner:Solução otimizada para virtulização com processador multi-core
- Blog:Vestíveis médicos com ótimo desempenho
- Torno com CNC
- Por que você deve confiar na SEW-Eurodrive com todas as suas necessidades de controle de motores