


Sensor de deformação ultrassensível baseado em filme piezoelétrico de poli (fluoreto de vinilideno) flexível
Resumo
Uma matriz de sensores 4 × 4 flexível com 16 unidades capacitivas em microescala foi demonstrada com base em filme piezoelétrico flexível de poli (fluoreto de vinilideno) (PVDF). A piezoeletricidade e a morfologia da superfície do PVDF foram examinadas por imagens ópticas e microscopia de força piezoresposta (PFM). O PFM mostra o contraste de fase, indicando interface clara entre o PVDF e o eletrodo. As propriedades eletromecânicas mostram que o sensor exibe uma excelente resposta de saída e uma relação sinal-ruído ultra-alta. A tensão de saída e a pressão aplicada possuem relação linear com inclinação de 12 mV / kPa. As características de saída de retenção e liberação se recuperam em menos de 2,5 μs, demonstrando excelente resposta eletromecânica. Além disso, a interferência de sinal entre as matrizes adjacentes foi investigada por meio de simulação teórica. Os resultados mostram que a interferência reduz com a diminuição da pressão a uma taxa de 0,028 mV / kPa, altamente escalável com o tamanho do eletrodo e se tornando insignificante para níveis de pressão abaixo de 178 kPa.
Histórico
Poli (fluoreto de vinilideno) (PVDF) é um material polimérico piezoelétrico quimicamente estável que tem muitas aplicações em diferentes campos por suas propriedades piroelétricas, piezoelétricas e ferroelétricas [1, 2]. Especialmente, devido às excelentes propriedades mecânicas (o módulo de Young 2500 MPa e a resistência no ponto de quebra ~ 50 MPa), o sensor de pressão baseado em PVDF mostra uma boa propriedade mecânica, como flexibilidade e antifadiga [3, 4]. Comparado com os sensores de pressão comumente usados com base em materiais da família PZT ferroelétricos, o sensor de pressão baseado em PVDF é atóxico e biocompatível [5, 6]. Mais importante ainda, o sensor baseado em PVDF era mais macio e resistente do que o sensor baseado em PZT devido ao alto coeficiente de flexibilidade do filme PVDF, que poderia ter os formatos necessários para detecção de deformação complexa [7, 8]. Consequentemente, o sensor de pressão baseado em PVDF é considerado um dos potenciais biossensores flexíveis para caracterização de pressão no rápido desenvolvimento do campo biomédico [9, 10]. Sharma et al. projetou um sensor de pressão para cateter inteligente com filme PVDF; poderia ser integrado a um cateter para medição de pressão em tempo real [11]. Bark et al. desenvolveu um sistema de sensor de onda de pulso para medir de forma não intrusiva os sinais de onda de pulso do coração das palmas das mãos do motorista com base em PVDF; os resultados mostram que o sistema de sensor pode fornecer sinais de onda de pulso claros para análise da variabilidade da frequência cardíaca, que podem ser usados para detectar o estado de vigilância do motorista para evitar acidentes de trânsito [12]. Lee et al. fabricou um sensor com nanoestruturas de PVDF e ZnO e conseguiu detectar as mudanças de pressão e temperatura para pele artificial [13]. O sensor, no entanto, detecta pressão apenas em um único ponto com grande dimensão.
As aplicações do mundo real, como biossensores com patches para detectar a pressão do corpo humano, exigem detecção multiponto, flexibilidade estrutural e sensibilidade ultra-alta [14,15,16]. Neste trabalho relatado, uma matriz de sensores flexíveis 4 × 4 com base em filme PVDF piezoelétrico é demonstrada, mostrando ultra-alta sensibilidade de 12 mV / kPa e resposta de saída rápida de 2,5 μs. A magnitude e a distribuição espacial da pressão aplicada em um dedo humano são caracterizadas.
Design e Experimental
Projeto e fabricação da matriz de sensores
A matriz de sensores proposta tem uma estrutura em sanduíche baseada em um filme fino de PVDF com espessura de cerca de 50 μm (Jinzhou Kexin Inc., China). As matrizes de eletrodos de alumínio com espessura de 20 μm foram cobertas em ambos os lados do filme de PVDF. A Figura 1a mostra um projeto esquemático do sensor. O sensor possui 16 unidades de micro-capacitor; cada 4 unidades compartilham um fio de conexão para minimizar a quantidade de fios do eletrodo.
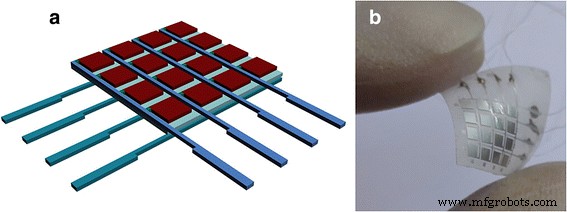
a Diagrama esquemático da matriz de sensores. b Imagem física do dispositivo definitivo
Para fabricar a matriz de sensores, uma lâmina de vidro coberta com polidimetilsiloxano (PDMS) foi preparada como um substrato rígido. O filme fino de PVDF coberto por Al em ambos os lados foi carregado no substrato. Em seguida, o fotorresiste foi revestido por spin na superfície do filme com uma velocidade de 3000 rpm por 40 s. Após fotolitografia e condicionamento úmido de Al por um sistema de alinhador de máscara (ABM, Inc., EUA), as 16 unidades capacitivas com estrutura quadrada 4 × 4 foram preparadas. Depois disso, o sensor flexível no substrato do PDMS foi retirado da lâmina de vidro. Os eletrodos de cada capacitor foram conectados aos fios condutores por meio de cola de prata. Para obter uma boa biocompatibilidade, o sensor foi embalado sendo coberto com PDMS na parte superior e aquecido por 12 ha 60 ° C. A Figura 1b exibe uma fotografia do sensor de pressão dobrado, mostrando que o sensor é flexível.
Propriedade piezoelétrica da matriz do sensor com base no filme PVDF
O estudo de microscopia de força de resposta Piezoresponse (PFM) (Seiko, Inc., Japão) foi realizado para caracterizar a morfologia da superfície e propriedades piezoelétricas do filme PVDF do sensor proposto sob uma tensão de polarização AC de 2 V com um tamanho de área de varredura de 2 × 2 μm 2 .
Calibração do Sensor Array
Para calibrar o sensor, várias pressões foram aplicadas no sensor proposto em uma plataforma experimental eletromecânica conectada a um equipamento de aquisição de dados (DAQ-USB6008) da National Instruments. A aquisição de dados com quatro sinais analógicos diferenciais foi definida com modelo diferencial. O sinal de tensão de saída do sensor proposto foi obtido alterando a conexão entre a matriz de sensores e o DAQ.
Resultados e discussão
A Figura 2a mostra a morfologia da superfície do sensor após ataque de Al, verificado por um microscópio óptico. O contraste bastante claro e escuro sugere uma interface clara entre PVDF e os eletrodos de Al gravados. A Figura 2b, c mostra a morfologia da superfície e o sinal de fase do filme PVDF do sensor de pressão. É indicado que a superfície do PVDF é lisa com uma estrutura de tecido. A imagem de fase da medida de PFM na Fig. 2c mostra uma forte resposta do domínio piezoelétrico que é consistente com a estrutura da superfície vista na Fig. 2b. Esses resultados sugerem que o sensor preparado com base no filme PVDF exibe uma boa piezoeletricidade.
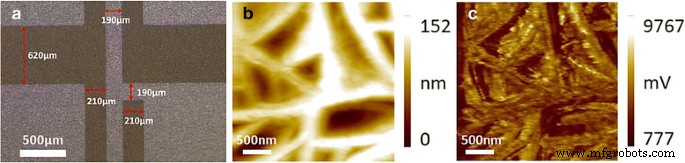
a Morfologia da superfície do sensor proposto após a tecnologia de corrosão. b Morfologia da superfície e c imagens de fase PFM do filme PVDF do sensor
Um resultado típico do sinal de saída é mostrado na Fig. 3a quando uma pressão constante de 98,1 kPa foi aplicada em um dos eletrodos quadrados do sensor [17]. O x -eixo e y -eixo mostra o tempo e a tensão de saída do eletrodo quadrado do sensor, respectivamente. A tensão de saída foi convertida da carga (Q) gerada pelo filme PVDF do sensor. Com base na equação da piezoeletricidade (onde d 33 é uma constante piezoelétrica quando a direção de polarização é a mesma que a direção do campo elétrico e F Z significa que a pressão é aplicada no z -direcção com a mesma direção de d 33 ), uma relação entre a tensão de saída e a pressão pode ser estabelecida. Os dados brutos foram obtidos aplicando um bloco de banda de 49–51 Hz. A linha de seta desta figura indica os sinais de cerca de 123,1 mV que foram gerados pela pressão aplicada no sensor. A tensão de saída do sensor pela pressão é mostrada claramente no sinal com baixo ruído e alta relação sinal-ruído. A fim de confirmar a propriedade de sincronização da matriz de sensores, uma pressão igual de 113,2 kPa foi aplicada em quatro unidades do sensor, simultaneamente. Os sinais de tensão de saída induzidos pela pressão foram mostrados na Fig. 3b. O quase o mesmo valor de saída de cerca de 190 mV foi obtido das quatro unidades do sensor ao mesmo tempo, o que sugere que a matriz de sensores exibiu uma alta estabilidade e propriedade de sincronização ao aplicar pressão multiponto. Para calibrar a matriz de sensores, diferentes pressões na faixa de 60–150 kPa foram aplicadas na matriz de sensores; a tensão de saída vs. a pressão aplicada foram obtidas e plotadas como a curva de calibração mostrada na Fig. 3c, que exibe uma relação linear. A inclinação da curva linear é de cerca de 2,9 mV / kPa e há um deslocamento de -159,2 mV na curva de calibração.
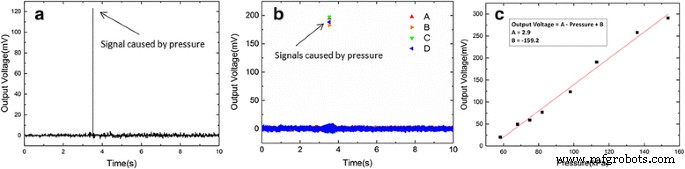
Tensões de saída filtradas para a um quadrado de eletrodo e b quatro quadrados de eletrodo do conjunto de sensores. c Ajuste da curva de calibração do liner do sensor proposto
A resposta de saída de segurar e soltar de um eletrodo quadrado do sensor foi obtida aplicando uma pressão de impulso com várias frequências. A curva traçada na Fig. 4a mostra a resposta típica do sensor aplicando a pressão de impulso de cerca de 75,1 kPa com uma frequência de 90 Hz. A tensão de saída positiva corresponde à compressão do quadrado do eletrodo da matriz de sensores e a tensão de saída negativa corresponde ao relaxamento. Como visto na inserção da Fig. 4a, a resposta de saída de manutenção e liberação semelhante também foi observada no filme de PVDF piezoelétrico nu [18]. O tempo de resposta da tensão de saída do sensor é inferior a 2 ms, o que sugere que o sensor exibe uma boa propriedade de resposta eletromecânica. As pressões de impulso dentro da faixa de 60-150 kPa foram aplicadas na matriz do sensor. As curvas de resposta de saída de retenção e liberação foram mostradas na Fig. 4b. O sensor mostra uma característica estável de resposta eletromecânica com o tempo de resposta de cerca de 2 ms sob diferentes pressões, e as tensões de saída do sensor sob diferentes pressões são consistentes com a curva de calibração linear obtida acima.
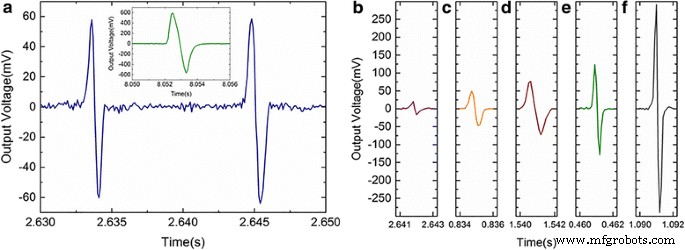
A resposta de saída de espera e solte das pressões de a 75,1 kPa, b 58,2 kPa, c 67,8 kPa, d 81,9 kPa, e 98,1 kPa e f 153,6 kPa; a inserção mostra a resposta de saída de retenção e liberação obtida do filme PVDF puro
A seguir, é estudada a aplicação de pressão no ponto seletivo. A interferência de sinal é mostrada entre as matrizes adjacentes, quando a pressão foi aplicada no eletrodo de uma das matrizes. A simulação de interferência de sinal foi conduzida via COMSOL Multiphysics em matrizes. Cada área do eletrodo é 1,4 mm 2 . A geometria da estrutura é mostrada na Fig. 5a. A deformação adicional, quando a pressão foi aplicada no eletrodo A, é vista na Fig. 5b, indicando que a deformação aumenta com a distância do eletrodo A. A interferência na diferença de potencial com um nível de pressão de 20 ~ 80 kPa foi estudada, mostrado em Fig. 5c. A diferença de potencial e a pressão apresentam uma relação linear com uma inclinação de 0,028 mV / kPa e uma interceptação de 5 × 10 −4 mV, implicando em interferência de nível muito baixo. Uma pressão abaixo de 178 kPa geraria interferência de sinal inferior a 5 mV, o que é desprezível [16, 17]. Além disso, a dependência da interferência no tamanho do eletrodo da matriz foi investigada. A Figura 5d mostra o resultado com tamanhos de eletrodo de 1,2, 1,0 e 0,8 mm 2 . Isso mostra que uma relação linear entre a diferença de potencial de interferência e a pressão (na faixa de 20 ~ 60 kPa) ainda pode ser observada no menor eletrodo. As inclinações de ajuste para a tensão de interface são 0,01748, 0,01181 e 0,00574 mV / kPa, respectivamente, para as três estruturas com a observação observada de potencial de interferência reduzido em tamanho de eletrodo menor.
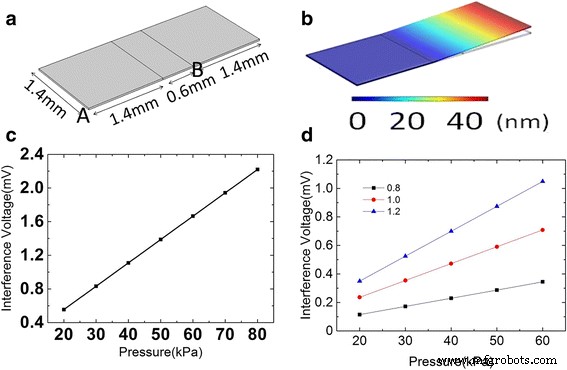
a Dimensões físicas usadas para simulação teórica. b Deslocamento e c ajuste da curva do liner entre a tensão de interferência e a pressão aplicada com um tamanho de matriz de 1,4 mm. d Resultados obtidos usando tamanhos de matriz de 0,8, 1,0 e 1,2 mm, respectivamente
Para uma aplicação prática simples, o sensor foi aplicado para medir o estado de pressão e distribuição do dedo da mão humana. Como todos nós sabemos, o movimento complexo dos dedos consiste em algumas habilidades básicas, como shiatsu, amassar, esfregar, fricção e assim por diante [19]. Em nossos experimentos, três movimentos mais comumente usados, incluindo shiatsu, amassamento e fricção, foram selecionados para testar o estado de pressão e a distribuição do dedo. A Figura 6 mostra um snap da distribuição de pressão do dedo polegar caracterizada pelo sensor durante os três movimentos do dedo, respectivamente. Na Fig. 6a, pode-se ver claramente que a pressão de 76 kPa foi focada no centro do dedo polegar durante o movimento de shiatsu, que são bastante diferentes com o amassamento e o atrito vistos na Fig. 6b, c, respectivamente. A Figura 6b mostra que a pressão da frente do dedo polegar é maior do que as outras partes do dedo durante o movimento de amassamento, enquanto a pressão do dedo polegar é bastante uniforme (cerca de 68 kPa) durante o movimento de fricção, como mostrado na Fig. 6c. A distribuição de pressão observada no dedo é um pouco semelhante aos relatórios anteriores em observação clínica [17, 20]. De acordo com nossas medições, o sensor de deformação baseado em filme PVDF ferroelétrico flexível mostrou-se sensível para caracterizar o complexo movimento do dedo. Espera-se explorar a habilidade do dedo humano com mais precisão usando o sensor proposto, e também seria útil desenvolver o robô para substituir dedos humanos no futuro.
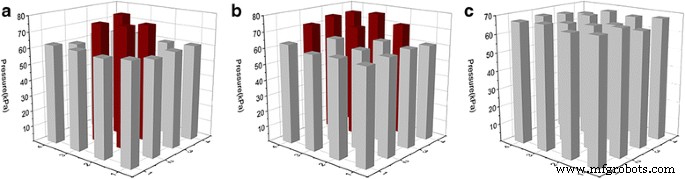
O estado de pressão e distribuição do movimento do dedo polegar caracterizado pelo sensor proposto: a o shiatsu, b o amassamento e c o atrito
Em conclusão, um conjunto de sensores 4 × 4 com 16 unidades de capacitor baseado no filme fino de PVDF piezoelétrico foi fabricado e embalado com PDMS. O conjunto de sensores exibe propriedades flexíveis e de alta sensibilidade. A resposta de saída de retenção e liberação do sensor foi obtida pela aplicação de pressões de impulso com várias frequências, o que indicou que a matriz de sensores poderia gerar sinais de tensão de 20–300 mV em 2 ms ao aplicar uma pressão na faixa de 60–150 kPa. As distribuições de pressão obviamente diferentes no dedo durante o movimento do dedo da mão humana foram observadas usando o sensor proposto, que deve explorar a habilidade dos dedos humanos com mais precisão.
Abreviações
- PFM:
-
Microscopia de força Piezoresponse
- PVDF:
-
Fluoreto de polivinilideno)
Estrutura Eletrônica Dependente de Spin e Valley em Siliceno sob Potenciais Periódicos
Redução aprimorada da condutividade do próton e da permeabilidade do metanol por meio da biomembrana de óxido de grafeno sulfonado eletrolítico de alginato de sódio
Nanomateriais
- Sensor de pressão arterial - Funcionando e suas aplicações
- Sensor piezoelétrico:Circuito, Especificações e Aplicações
- Infineon:sensor de pressão barométrica ultrapequeno
- O sensor de pressão barométrica oferece maior precisão
- Sensor de pressão barométrica digital BMP180 I2C
- Projeto Raspberry PI IoT Conectando o Sensor DHT11
- Sensor de pressão vestível de metal líquido
- Filme Sensor para Aeroespacial
- Microsensores de fluxo ultra-sensíveis
- O que é um sensor piezorresistivo?