


Como o motor sem escova e o ESC funcionam
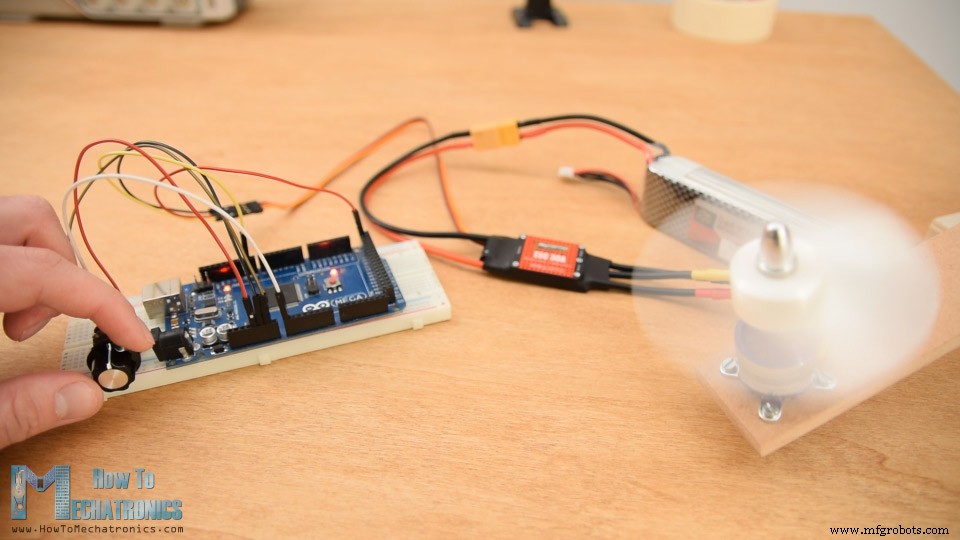
Neste tutorial vamos aprender como funcionam o motor brushless e o ESC. Este artigo é a primeira parte do vídeo a seguir, onde aprenderemos o princípio de funcionamento de um motor CC sem escova e ESC (Controlador Eletrônico de Velocidade), e na segunda parte aprenderemos como controlar o motor BLDC usando Arduino.
Você pode assistir ao vídeo a seguir ou ler o tutorial escrito abaixo.
Como funciona
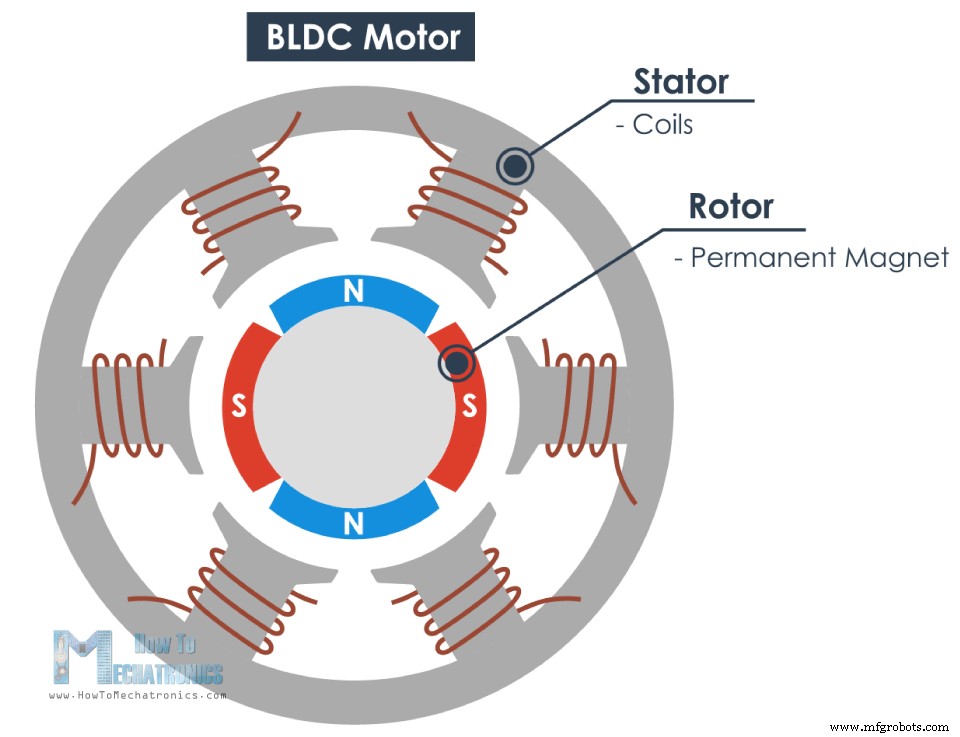
Um motor BLDC consiste em duas partes principais, um estator e um rotor. Para esta ilustração o rotor é um imã permanente com dois pólos, enquanto o estator consiste em bobinas dispostas conforme mostrado na figura abaixo.
Todos sabemos que, se aplicarmos corrente através de uma bobina, ela gerará um campo magnético e as linhas do campo magnético ou os pólos dependem da direção da corrente.
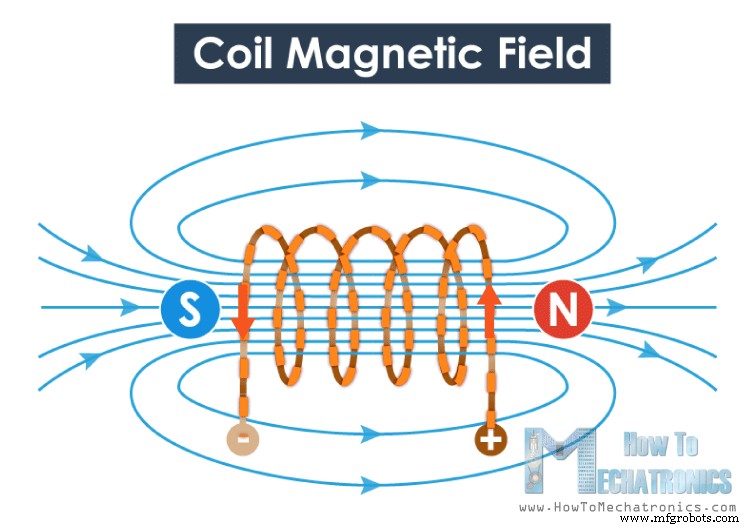
Portanto, se aplicarmos a corrente apropriada, a bobina gerará um campo magnético que atrairá o ímã permanente dos rotores. Agora, se ativarmos cada bobina uma após a outra, o rotor continuará girando por causa da interação da força entre o permanente e o eletroímã.
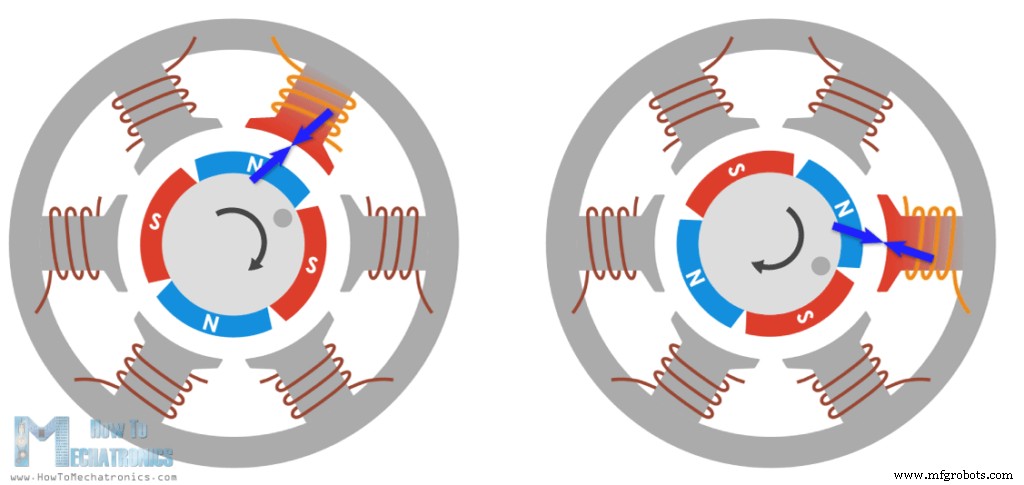
Para aumentar a eficiência do motor podemos enrolar duas bobinas opostas como uma única bobina de forma que gerará pólos opostos aos pólos do rotor, assim obteremos força de atração dupla.
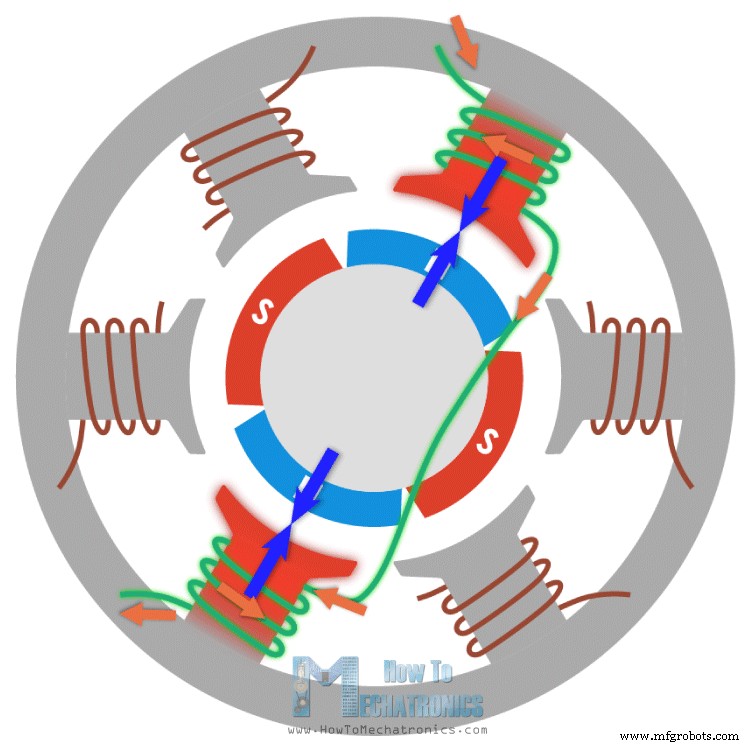
Com esta configuração podemos gerar os seis polos do estator com apenas três bobinas ou fase. Podemos aumentar ainda mais a eficiência energizando duas bobinas ao mesmo tempo. Dessa forma, uma bobina atrairá e a outra bobina repelirá o rotor.
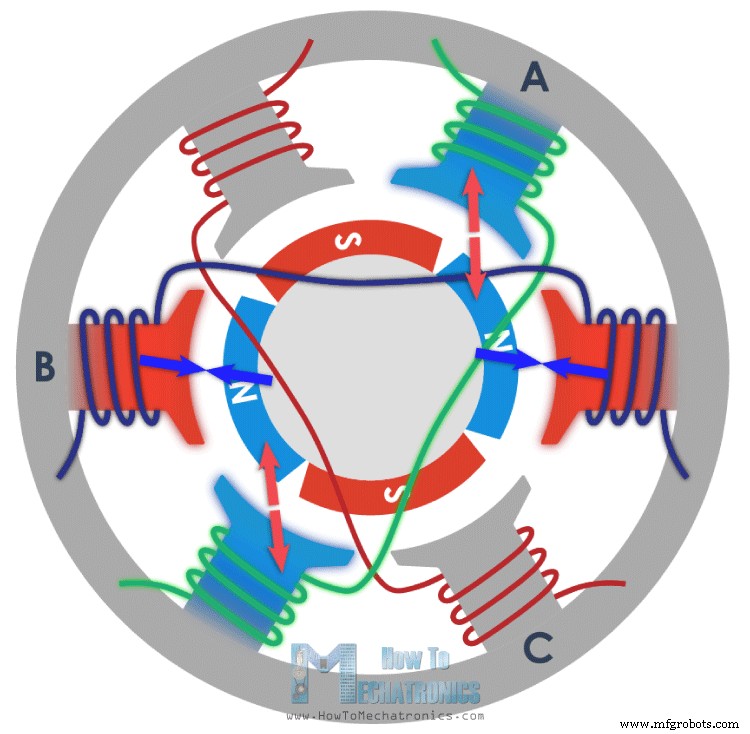
Para que o rotor faça um ciclo completo de 360 graus, ele precisa de seis etapas ou intervalos.
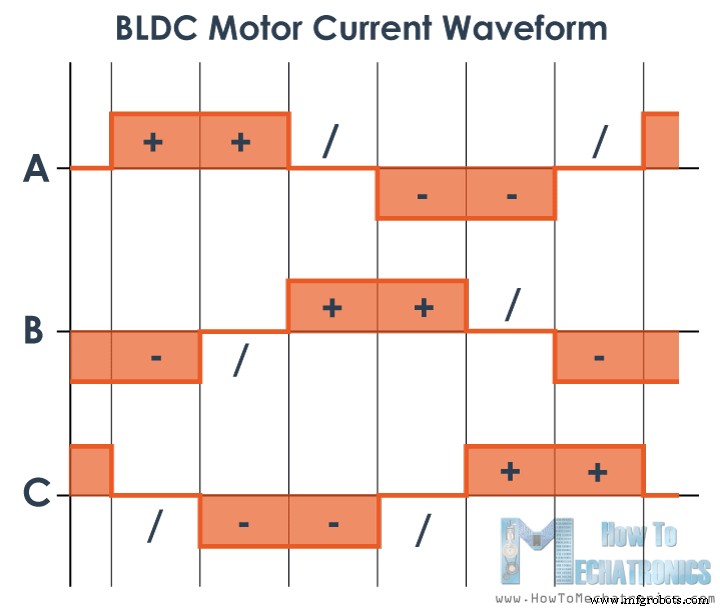
Se observarmos a forma de onda da corrente podemos notar que em cada intervalo há uma fase com corrente positiva, uma fase com corrente negativa e a terceira fase é desligada. Isso dá a ideia de que podemos conectar os terminais livres de cada uma das três fases e assim podemos compartilhar a corrente entre eles ou usar uma única corrente para energizar as duas fases ao mesmo tempo.
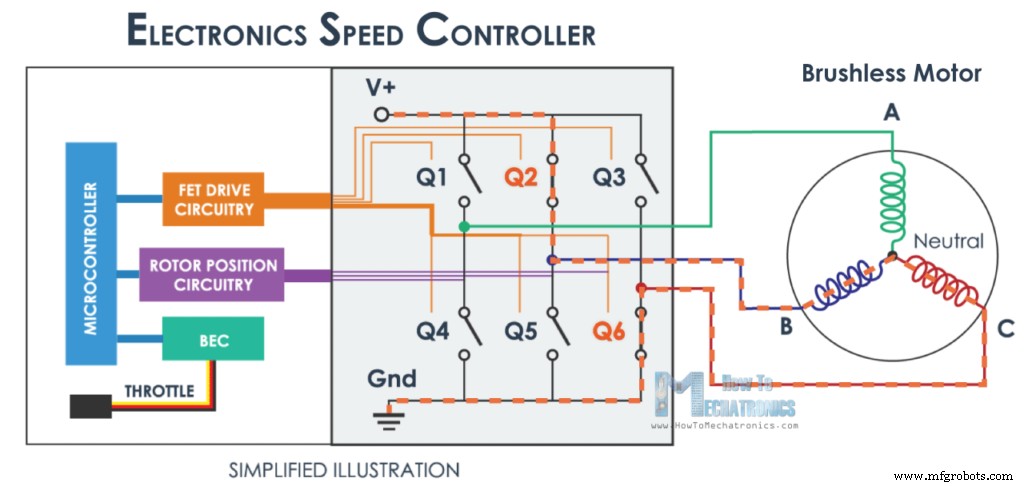
Aqui está um exemplo. Se puxarmos a fase A High, ou conectarmos à tensão DC positiva, com algum tipo de chave, por exemplo um MOSFET, e por outro lado, conectarmos a fase B ao terra, então a corrente fluirá do VCC, através fase A, o ponto neutro e a fase B, à terra. Assim, com apenas um único fluxo de corrente geramos os quatro pólos diferentes que fazem o rotor se mover.
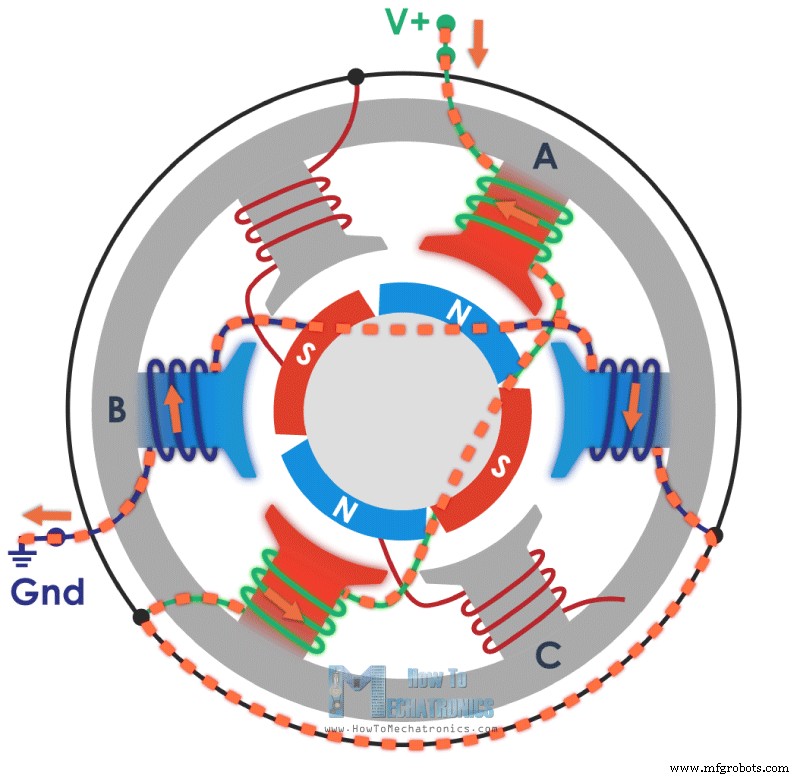
Com essa configuração, na verdade, temos uma conexão em estrela das fases do motor, onde o ponto neutro é conectado internamente e as outras três extremidades das fases saem do motor e é por isso que o motor brushless tem três fios saindo dele.
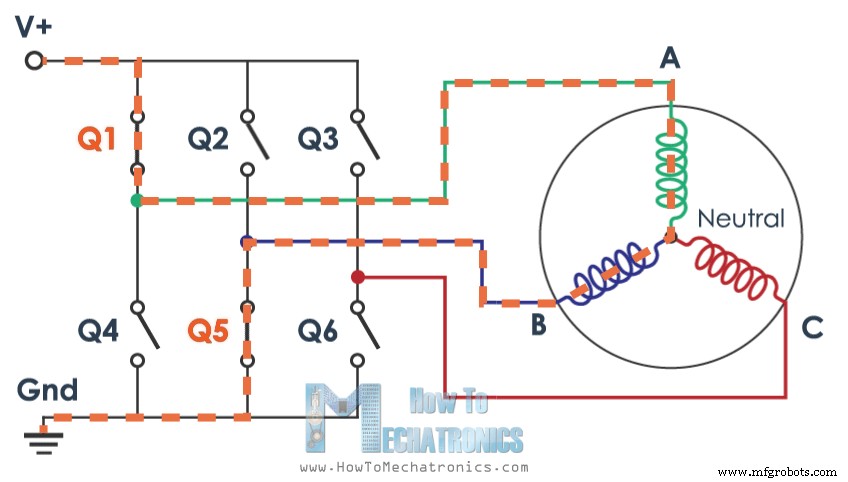
Então, para que o rotor faça um ciclo completo, só precisamos ativar os dois MOSFETS corretos em cada um dos 6 intervalos e é disso que se trata os ESCs.
Como funciona um ESC (controlador eletrônico de velocidade)
Um ESC ou um Controlador Eletrônico de Velocidade controla o movimento ou a velocidade do motor sem escovas ativando os MOSFETs apropriados para criar o campo magnético rotativo para que o motor gire. Quanto maior a frequência ou quanto mais rápido o ESC passar pelos 6 intervalos, maior será a velocidade do motor.
No entanto, aqui vem uma questão importante, e é assim que sabemos quando ativar qual fase. A resposta é que precisamos saber a posição do rotor e existem dois métodos comuns usados para determinar a posição do rotor.
O primeiro método comum é o uso de sensores de efeito Hall embutidos no estator, dispostos igualmente a 120 ou 60 graus um do outro.
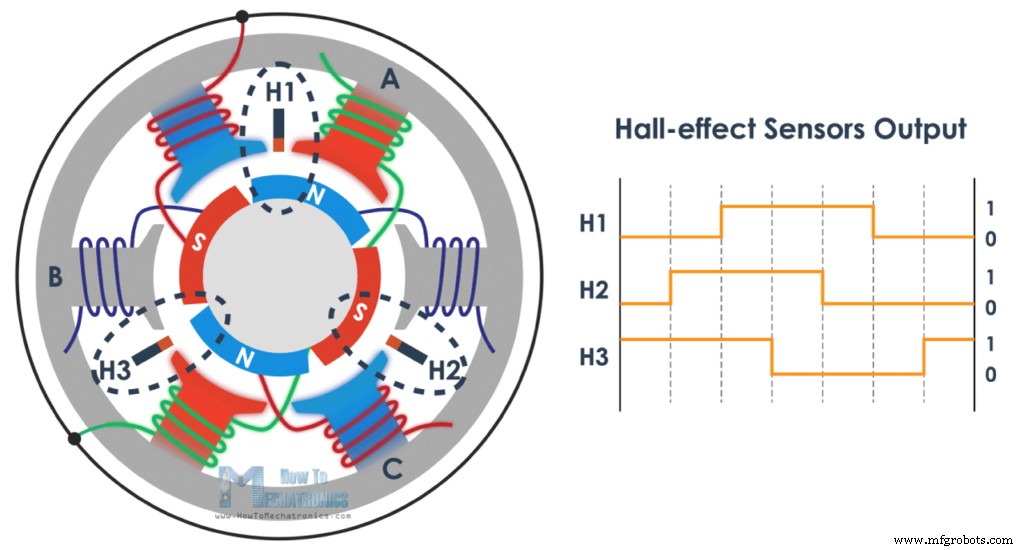
À medida que os ímãs permanentes dos rotores giram, os sensores de efeito Hall detectam o campo magnético e geram uma lógica “alta” para um pólo magnético ou uma lógica “baixa” para o pólo oposto. De acordo com esta informação o ESC sabe quando ativar a próxima seqüência ou intervalo de comutação.
O segundo método comum usado para determinar a posição do rotor é através da detecção da força eletromotriz traseira ou EMF traseira. A volta EMF ocorre como resultado do processo exatamente oposto de gerar um campo magnético ou quando um campo magnético em movimento ou em mudança passa por uma bobina, induz uma corrente na bobina.
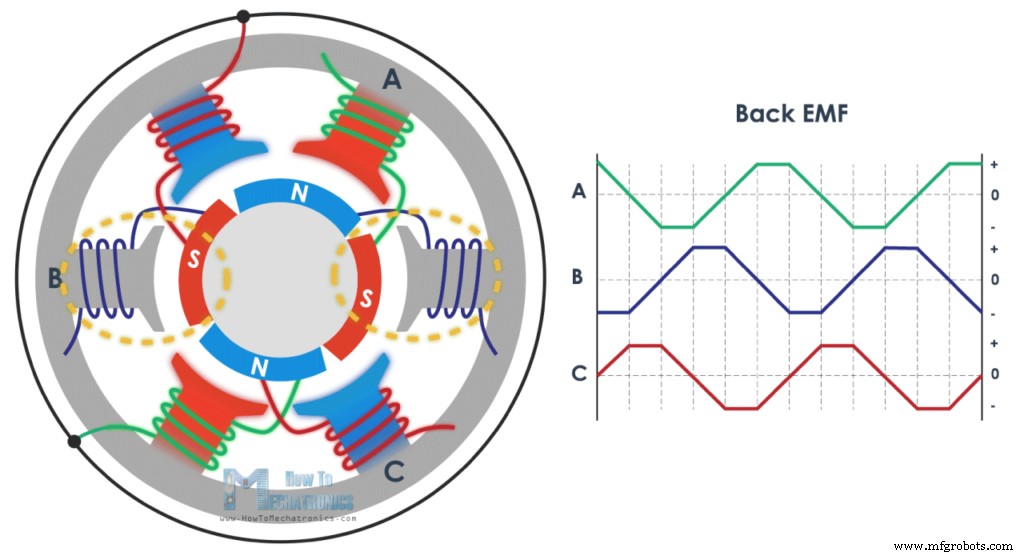
Assim, quando o campo magnético em movimento do rotor passar pela bobina livre ou inativa, induzirá um fluxo de corrente na bobina e como resultado ocorrerá uma queda de tensão nessa bobina. O ESC captura essas quedas de tensão à medida que ocorrem e, com base nelas, prevê ou calcula quando deve ocorrer o próximo intervalo.
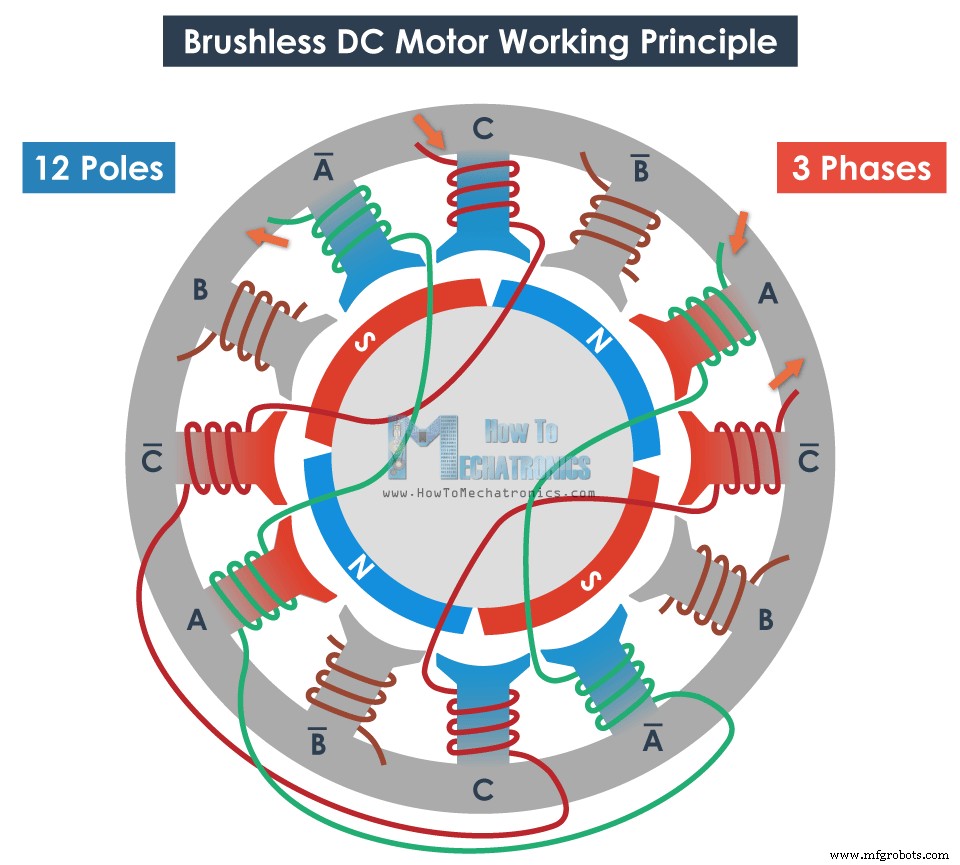
Portanto, esse é o princípio básico de funcionamento dos motores CC sem escova e ESCs e é o mesmo, mesmo que aumentemos o número de pólos do rotor e do estator. Ainda teremos um motor trifásico, apenas o número de intervalos aumentará para completar um ciclo completo.
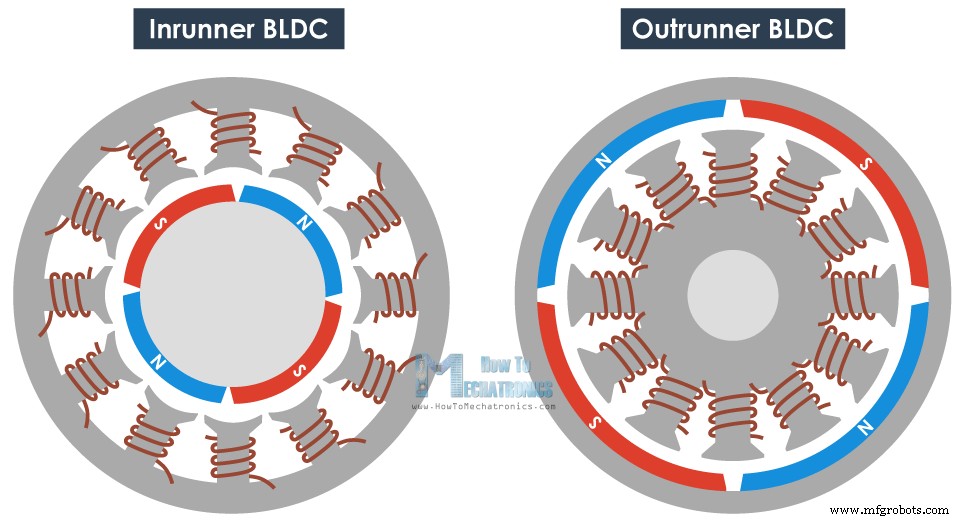
Aqui também podemos mencionar que os motores BLDC podem ser inrunners ou outrunners. Um motor brushless inrunner possui os ímãs permanentes dentro dos eletroímãs e vice-versa, um motor outrunner possui os ímãs permanentes fora dos eletroímãs. Novamente, eles usam o mesmo princípio de funcionamento e cada um deles tem seus próprios pontos fortes ou fracos.
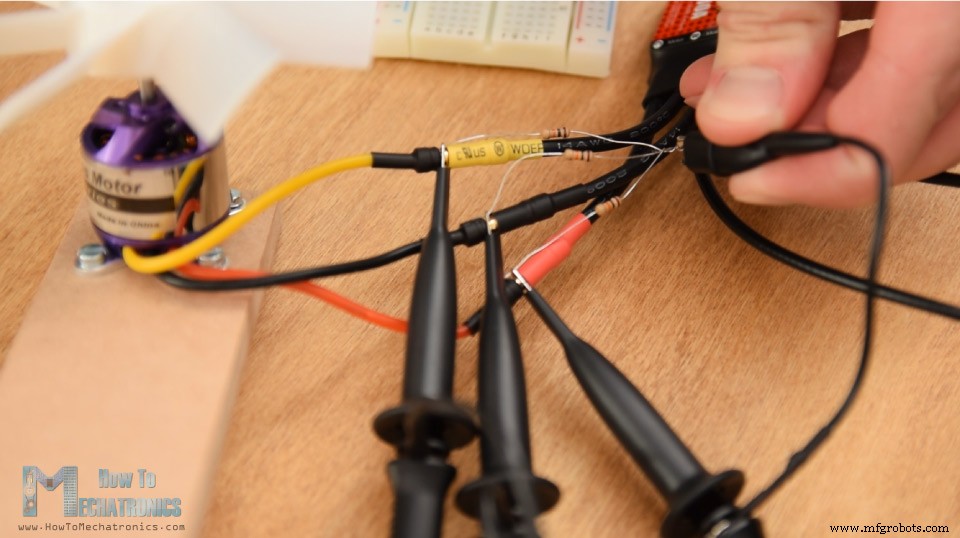
Ok, isso é teoria suficiente, então agora vamos demonstrar e ver na vida real o que explicamos acima. Para isso vamos conectar as três fases de um motor brushless a um osciloscópio. Liguei 3 resistores em um único ponto para fazer um ponto neutro virtual e do outro lado liguei-os às três fases do motor BLDC.
A primeira coisa que podemos notar aqui são as três ondas senoidais. Essas ondas senoidais são, na verdade, o EFM de volta gerado nas fases em que não estão ativas.
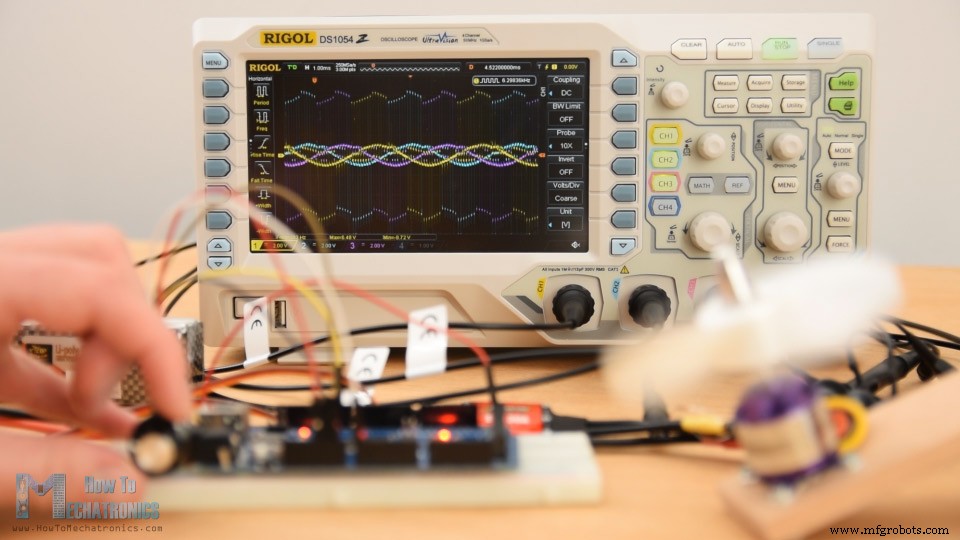
Podemos ver que à medida que alteramos a RPM do motor, a frequência das ondas senoidais muda e também sua amplitude. Quanto maior a RPM, maior a freqüência e a amplitude das ondas senoidais de EMF. No entanto, o que aciona o motor são, na verdade, esses picos, que são as fases ativas que geram o campo magnético variável.
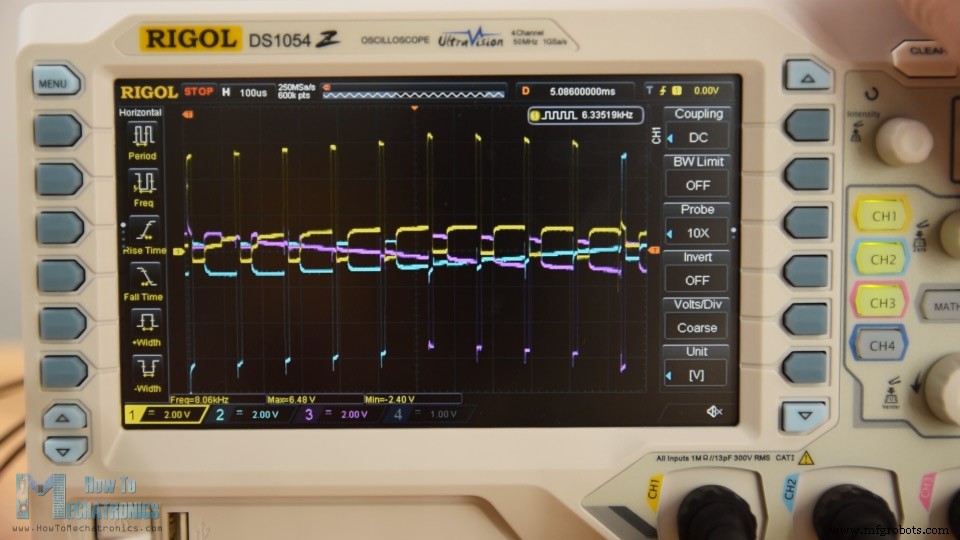
Podemos notar que a cada intervalo, há duas fases ativas e uma inativa. Por exemplo, aqui temos as fases A e B ativas, enquanto a fase C está inativa. Então temos as fases A e C ativas, enquanto a fase B está inativa e assim por diante.
Aqui eu gostaria de agradecer a Banggood.com por me fornecer este osciloscópio. É o Rigol DS1054Z e é um dos melhores osciloscópios básicos para seu preço. Possui quatro canais de entrada, largura de banda de 50MHz, que pode ser hackeada até 100MHz, taxa de amostragem de 1GSa/s e profundidade de memória relativamente grande de 24Mpts.

A tela é de 7 polegadas e é muito bonita e brilhante. Possui várias funções matemáticas, filtros passa-baixa e passa-alta, decodificação SPI e I2C e muito mais. Então, novamente, muito obrigado a Banggood.com e certifique-se de verificar este osciloscópio em sua loja.
No entanto, esse é o princípio básico de funcionamento do motor sem escova. Caso você queira alguns exemplos mais reais ao vivo e aprenda a controlar motores brusheless usando o Arduino, você deve verificar a parte dois deste tutorial.
Espero que tenham gostado deste tutorial e aprendido algo novo. Sinta-se à vontade para fazer qualquer pergunta na seção de comentários abaixo e não se esqueça de verificar minha coleção de projetos do Arduino.
O que é Strain Wave Gear, também conhecido como Harmonic Drive? Um conjunto de equipamentos perfeito para aplicações de robótica!?
555 Temporizador PWM DC Motor Controlador de Velocidade
Tecnologia industrial
- Uma introdução aos Cam Locks e como funcionam
- Uma introdução aos parafusos de olho e como eles funcionam
- Uma introdução aos ilhós e como eles funcionam
- O que é moldagem por transferência e como ela funciona?
- O que é uma transmissão e como funciona?
- Como funciona um motor CC escovado
- O que é impressão 3D? - Tipos e como funciona
- O que é soldagem a arco? - Tipos e como funciona
- O que é uma mandrilar CNC e como ela funciona?
- O que é uma embreagem industrial e como ela funciona?