


Earth_Analyzer
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 |
Ferramentas e máquinas necessárias
 |
| |||
 |
| |||
 |
| |||
 |
|
Aplicativos e serviços online
 |
| |||
 |
| |||
| ||||
 |
| |||
| ||||
 |
| |||
 |
|
Sobre este projeto
OLÁ, OLÁ TODO O MUNDO
Este projeto é principalmente sobre o rover para a terra que pode ajudar os agricultores. Este projeto contém principalmente três módulos.
MÓDULO 1:
As conexões de hardware para a configuração completa agora consideram os motores CC.
Isso requer dois motores CC e drivers de motor. driver do motor contém
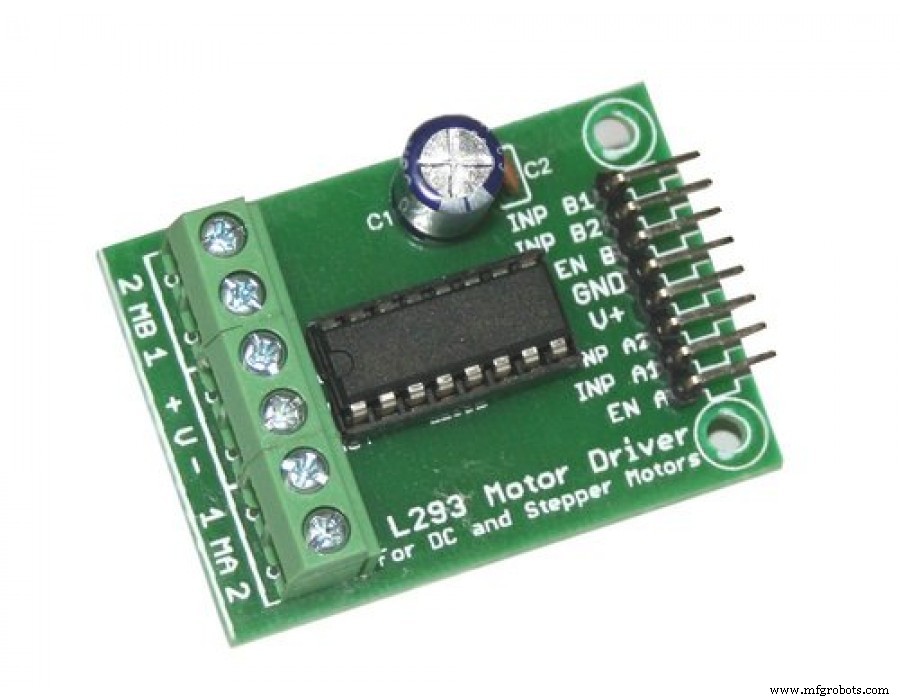
Aqui você tem que conectar v +, en1, en2, ao único ponto na placa de pão e quatro fios do motor às quatro entradas nos pinos de 1 ma 2. Agora, a seguir, os pinos de saída do pino do driver do motor são conectados ao arduino e a bateria deve ser conectada conforme o diagrama a seguir.
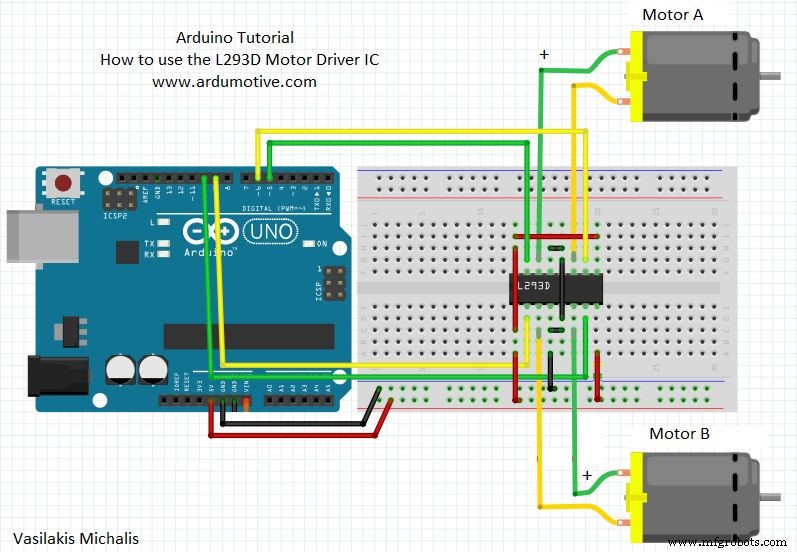
Em seguida, temos que conectá-los ao parafuso. Os mesmos quatro pinos devem ser conectados aos pinos digitais do parafuso (0, 1, 2, 3).
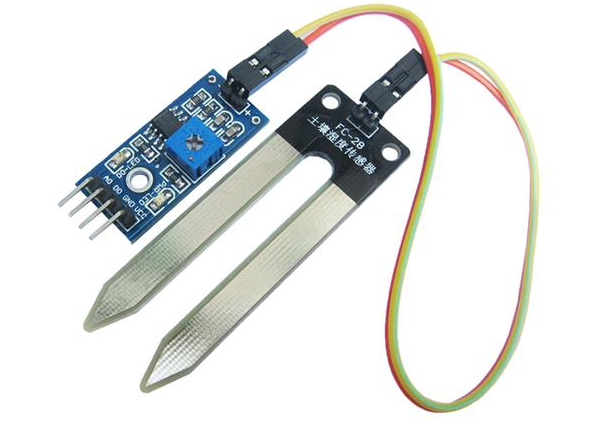
agora o sensor de solo deve ser conectado ao parafuso, mas colocando o pino digital no parafuso (pino digital 4). agora finalmente é hora de conectar o sensor de temperatura ao pino analógico do parafuso (A0).
Agora desta vez todo o aterramento e o v + (sensor de temperatura, sensor de umidade), en1, en2 aos 5v do arduino e finalmente este todos os pinos devem ser fornecidos com as baterias de voltagem necessárias.
MÓDULO 2:
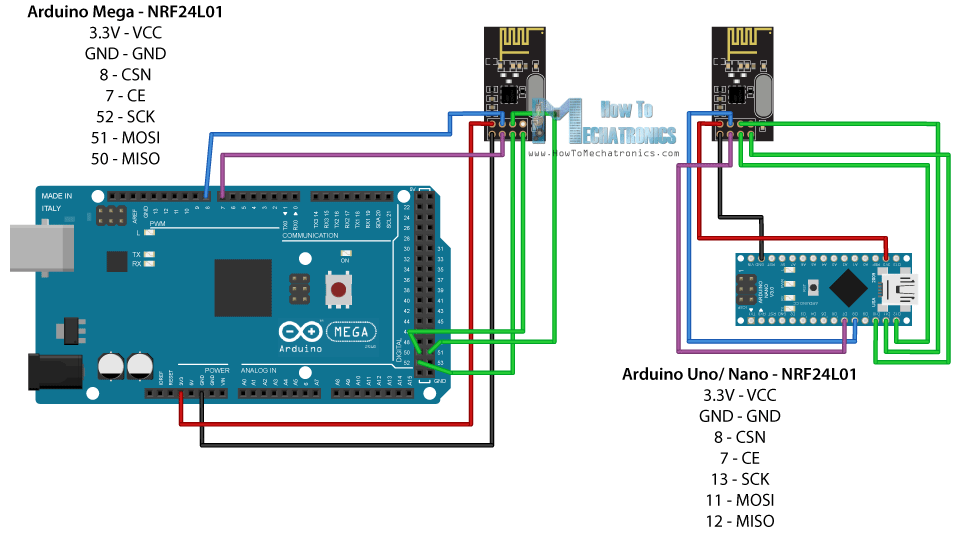
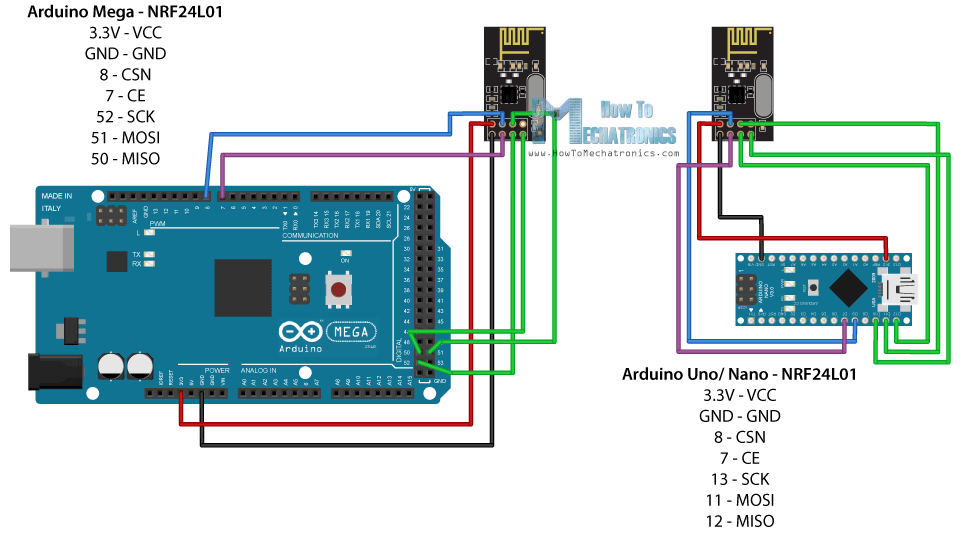
CONEXÕES NRF:

O diagrama acima é chamado de módulo nrf, usado para comunicação de rádio. O diagrama acima também deve ser incluído em nosso circuito para controlar o carro nas áreas próximas.

CONEXÃO FINAL DA NRF COM O ARDUINO
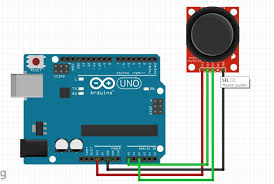
AGORA SEU HORA DE CONECTAR JOY STICKS:
Dois joysticks são usados:
1) para controlar a direção do carro.
2) para controlar o servo.
MÓDULO 3:
CODIFICAÇÃO FINAL
1) CODIFICAÇÃO DE ARDUINO:
transmissor:
#include
#include
#include
#include
#include
Rádio RF24 (7, 8); // CSN, CE
endereço de byte const [6] ="00001";
int x_key =A1;
int y_key =A0;
int p_key =A3;
int q_key =A2;
int x_pos;
int y_pos;
int p_pos;
int q_pos;
configuração void () {
radio.begin ();
radio.openWritingPipe (endereço)
;
radio.setPALevel (RF24_PA_MIN);
radio.setChannel (87);
radio.setDataRate (RF24_
250KBPS);
radio.stopListening ();
Serial.begin (9600);
pinMode (x_key, INPUT);
pinMode (y_key, INPUT);
pinMode (p_key, INPUT);
pinMode (q_key, INPUT);
}
int pos;
void loop () {
x_pos =analogRead (x_key);
y_pos =analogRead (y_key);
p_pos =analogRead (p_key);
q_pos =analogRead (q_key);
Serial.println (x_pos);
Serial.println (y_pos);
Serial.println (p_pos);
Serial.println (q_pos);
if ( p_pos> 400 &&p_pos <600 &&q_pos> 400 &&q_pos <600)
{
if (x_pos> 400 &&x_pos <600 &&y_pos> 400 &&y_pos <600)
{
pos =100;
radio.write (&pos, sizeof (pos));
}
if (x_pos> 400 &&x_pos <600 &&y_pos <400)
{
pos =200;
radio.write (&pos, sizeof (pos));
}
if (x_pos> 400 &&x_pos <600 &&y_pos> 600)
{
pos =300;
radio.write (&pos, sizeof (pos));
}
if (y_pos> 400 &&y_pos <600 &&x_pos <400)
{
pos =400;
radio.write (&pos, sizeof (pos));
}
if (y_pos> 400 &&y_pos <600 &&x_pos> 600 )
{
pos =500;
radio.write (&pos, sizeof (pos));
}
Serial.println (pos);
atraso (100);
}
else if (p_pos <400 || p_pos> 600)
{
if (p_pos <400)
{
pos =600;
radio.write (&pos, sizeof (pos));
}
if (p_pos> 600)
{
pos =700;
radio.write (&pos, sizeof (pos));
}
delay (100);
}
} receptor:
#include
#include
#include
#include
#include
#include
Servo servo;
Rádio RF24 (7, 8); // CSN, CE
const byte address [6] ="00001";
int servo_pin =9;
int sensor_pin =A0;
int output_value;
void setup () {
Serial.begin (9600);
radio.begin ();
servo.attach (servo_pin);
radio.openReadingPipe (0, endereço);
radio.setPALevel (RF24_PA_MIN);
radio.setChannel (87);
radio.setDataRate (RF24_250KBPS);
radio.startListening ();
}
int pos;
void loop () {
if (radio.available ()) {
radio.read (&pos, sizeof (pos));
Serial.println (pos);
if (pos ==100)
{
digitalWrite (6, LOW);
digitalWrite (5, LOW);
digitalWrite (4, BAIXO);
digitalWrite (3, BAIXO);
// Serial.println ("gk0");
}
else if (pos ==200) {
digitalWrite (6, ALTO);
digitalWrite (5, BAIXO);
digitalWrite (4, ALTO);
digitalWrite (3, BAIXO);
atraso ( 10);
// Serial.println ("gk1");
}
else if (pos ==300) {
digitalWrite (6, LOW);
digitalWrite (5, HIGH);
digital Write (4, LOW);
digitalWrite (3, HIGH);
delay (10);
// Serial.println ("gk2");
}
else if (pos ==400) {
digitalWrite (6, LOW);
digitalWrite (5, HIGH);
digitalWrite (4, HIGH);
digitalWrite (3 , LOW);
delay (10);
// Serial.println ("gk3");
}
else if (pos ==500) {
digitalWrite (6, HIGH);
digitalWrite (5, LOW);
digitalWrite (4, LOW);
digitalWrite (3, HIGH);
delay (10);
// Serial.println ("gk5");
}
else if (pos ==600) {
servo.write (90);
atraso (10 );
// Serial.println ("gk6");
}
else if (pos ==700) {
servo.write (180);
atraso ( 10);
// Serial.println ("gk7");
}
}
else
{
Serial.println ( "conexão perdida");
}
}
} agora para receber mensagem de telegrama:(código do servidor)
faça login em um dos servidores como ripl.it e, em seguida, carregue os códigos
main.py
solicitações de importação # para fazer solicitações HTTP
import json # biblioteca para lidar com dados JSON
tempo de importação # módulo para operação de hibernação
do boltiot import Bolt # importando Bolt do módulo boltiot
import conf # config file
mybolt =Bolt (conf.bolt_api_key, conf.device_id)
def get_sensor_value_from_pin (pin):
try:
response =mybolt.digitalRead (pin)
data =json.loads (resposta)
if data ["sucesso"]! =1:
print ("Solicitação sem sucesso")
print ("Isto é a resposta-> ", data)
return -999
sensor_value =int (data [" value "])
return sensor_value
exceto Exceção como e:
print ("Algo deu errado ao retornar o valor do sensor")
print (e)
return -999
def send_telegram_message (mensagem):
"" "Envia mensagem via telegrama" ""
url ="https://api.telegram.org/" + conf.telegram_bot_id + "/ sendMessage"
data ={
"chat_id":conf.telegram_chat_id,
"texto":mensagem
}
tentar:
re sponse =requests.request (
"GET",
url,
params =data
)
print ("Esta é a resposta do Telegram")
print (response.text)
telegram_data =json.loads (response.text)
return telegram_data ["ok"]
exceto Exceção como e:
print ("Ocorreu um erro ao enviar a mensagem de alerta via telegrama ")
print (e)
retornar False
enquanto True:
# Etapa 1
sensor_value =get_sensor_value_from_pin (" 4 ")
print ("O valor atual do sensor é:", sensor_value)
# Etapa 2
if sensor_value ==-999:
print ("A solicitação não foi bem-sucedida. Pulando. ")
time.sleep (10)
continuar
# Etapa 3
if sensor_value> =conf.threshold:
print (" O valor da temperatura atual é ")
message =" O valor de umidade é apenas maior que o limite "
telegram_status =send_telegram_message (mensagem)
print (" Este é o status do telegrama:", telegram_status)
# Etapa 4
time.sleep (100) conf.py:
"" "Configurações para telegram_alert.py" ""
bolt_api_key ="XXXX" # Esta é a sua chave API Bolt Cloud
device_id ="XXXX" # Esta é a ID do dispositivo e será semelhante a BOLTXXXX onde XXXX é alguns números
telegram_chat_id ="@XXXX" # Este é o ID do canal do canal Telegram criado. Colar depois de @
telegram_bot_id ="botXXXX" # Este é o ID do bot do Telegram Bot criado. Colar após bot
threshold =0 # Threshold além do qual o alerta deve ser enviado insira seus valores de bot e api
PROCESSO:
Mensagens de alerta usando Telegram
O que é Telegram?
Telegram é um aplicativo de mensagens semelhante ao Whatsapp. Você também pode enviar e receber mensagens junto com arquivos. É de uso gratuito. Você pode acessar a plataforma através do seu telefone Android / iOS / Windows e também do seu PC ou Mac.

Algumas terminologias do Telegram -
O que é um canal Telegram?
Um canal é para telegramar o que os grupos são para o Whatsapp. Os canais são uma ferramenta para transmitir suas mensagens para grandes públicos. Eles podem ter um número ilimitado de assinantes, podem ser públicos com uma URL permanente e cada postagem em um canal tem seu próprio contador de visualizações.
O que é um bot?
Bots são aplicativos de terceiros executados dentro do Telegram. Os usuários podem interagir com os bots, enviando-lhes mensagens, comandos e solicitações.
Estaremos utilizando Bots para enviar alertas em nosso canal.
O que aprenderemos neste projeto?
Neste projeto, você será capaz de enviar alertas via Telegram para o seu telefone quando o valor do sensor exceder o seu limite definido.
O que eu preciso para este projeto?
Para enviar alertas e mensagens via Telegram, você precisará,
- Um telefone Android / iOS / Windows com conectividade com a Internet.
- Uma conta do Telegram. Você precisará de um número de celular para isso.
- Acesso ao seu sistema operacional Ubuntu via puTTY ou máquina virtual.
Configurar telegrama
Etapas para se inscrever / entrar no Telegram
- Vá para a Playstore ou App Store em seu telefone e pesquise por Telegram.
- Baixe e instale a versão mais recente do aplicativo Telegram.
- Inscreva-se para uma nova conta ou acesse o Telegram fornecendo seu número de celular.
- O Telegram ligará para você OU enviará um SMS para verificar o seu número de celular.
- Faça com que sua conta seja verificada e aprove todas as permissões, se necessário.
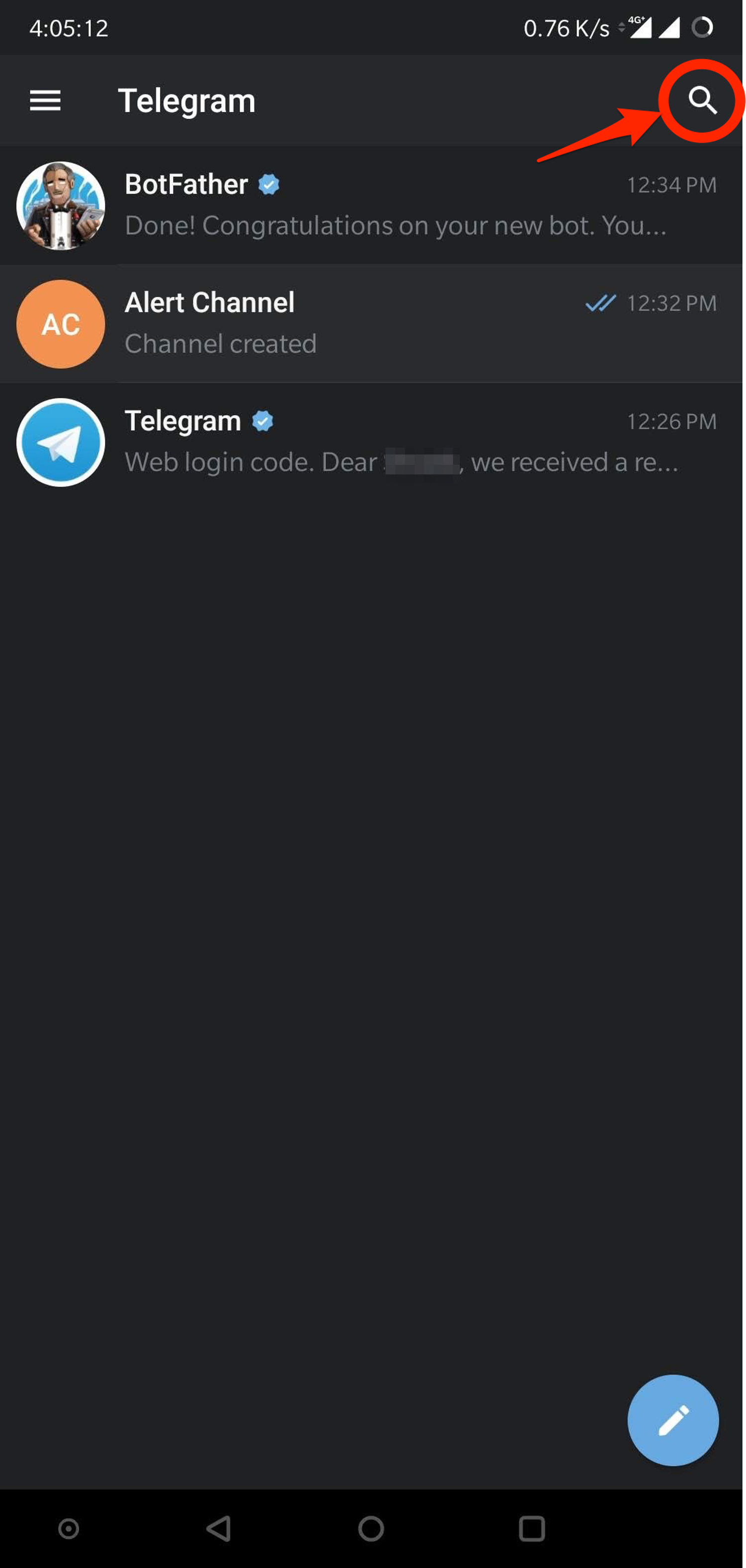
- Você será conectado ao Telegram e verá uma tela semelhante a esta abaixo. (Tudo bem se for diferente da captura de tela abaixo)
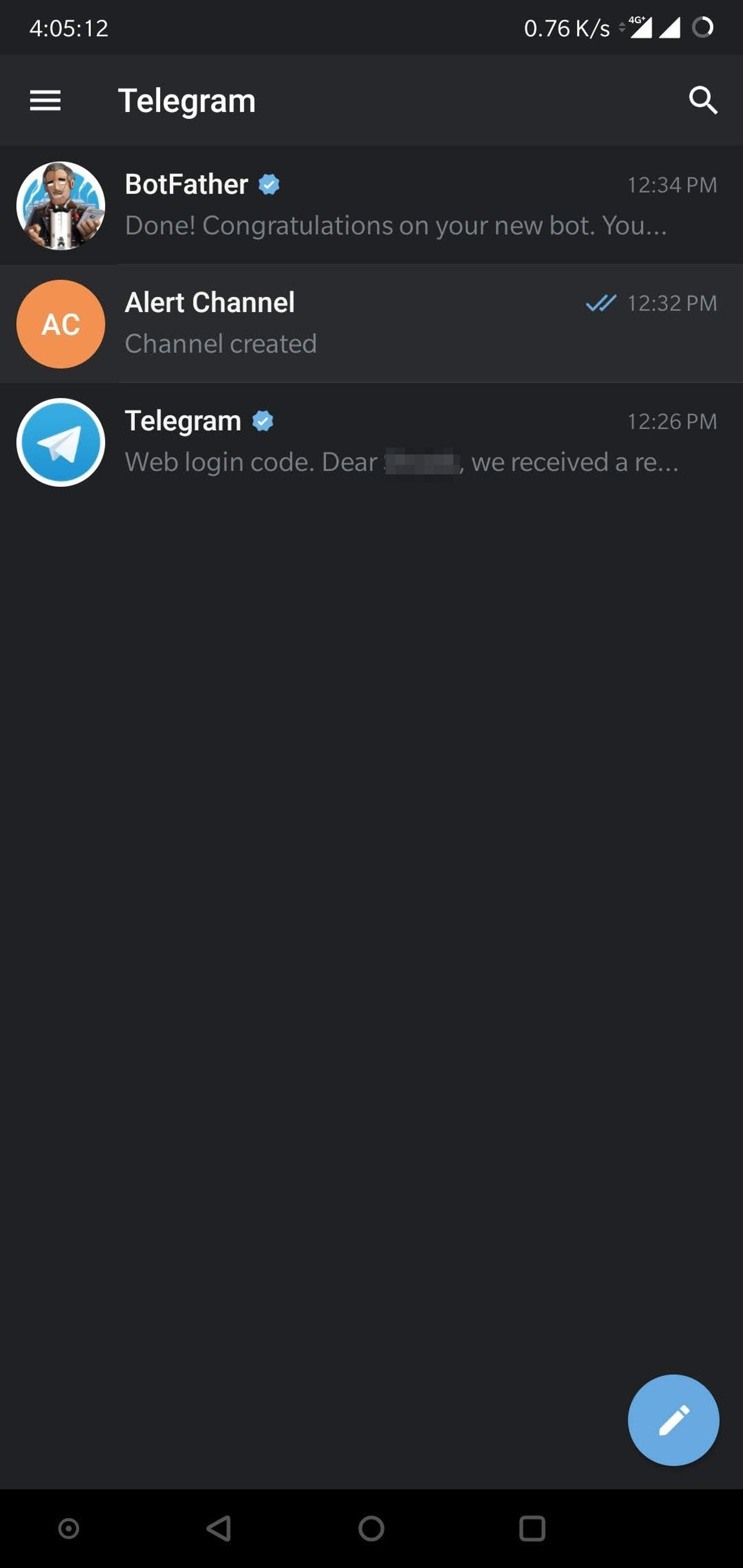
Você instalou o Telegram e configurou sua conta com sucesso. Nas próximas lições, aprenderemos mais sobre canais e bots.
Criação de um canal
O que é um canal Telegram?
Um canal é para telegramar o que os grupos são para o Whatsapp. Os canais são uma ferramenta para transmitir suas mensagens para grandes públicos. Eles podem ter um número ilimitado de assinantes, podem ser públicos com uma URL permanente e cada postagem em um canal tem seu próprio contador de visualizações.
Passos para criar um canal
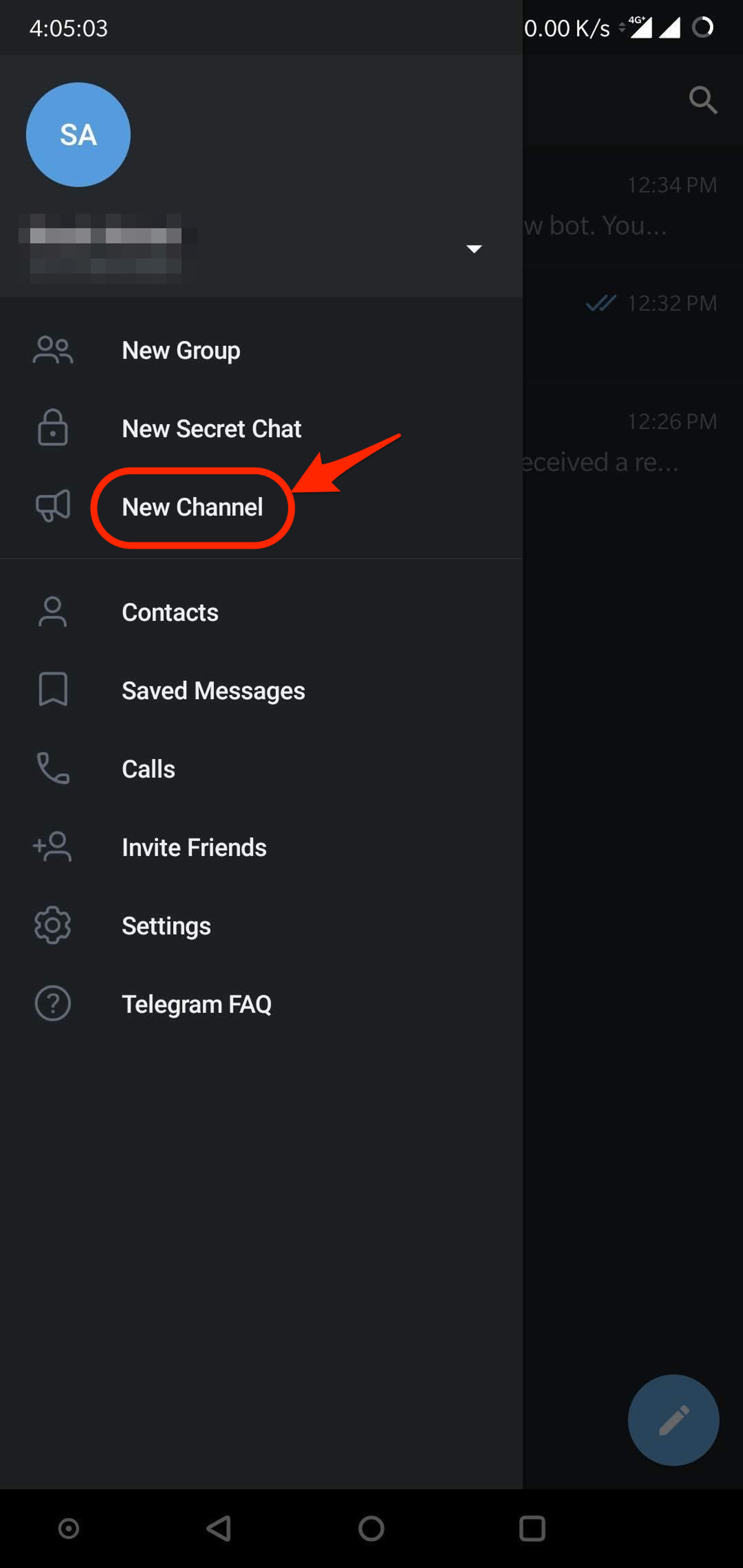
- Vá para a tela inicial do aplicativo Telegram.
- Deslize do lado esquerdo para revelar o menu.
- Clique em "Novo canal".
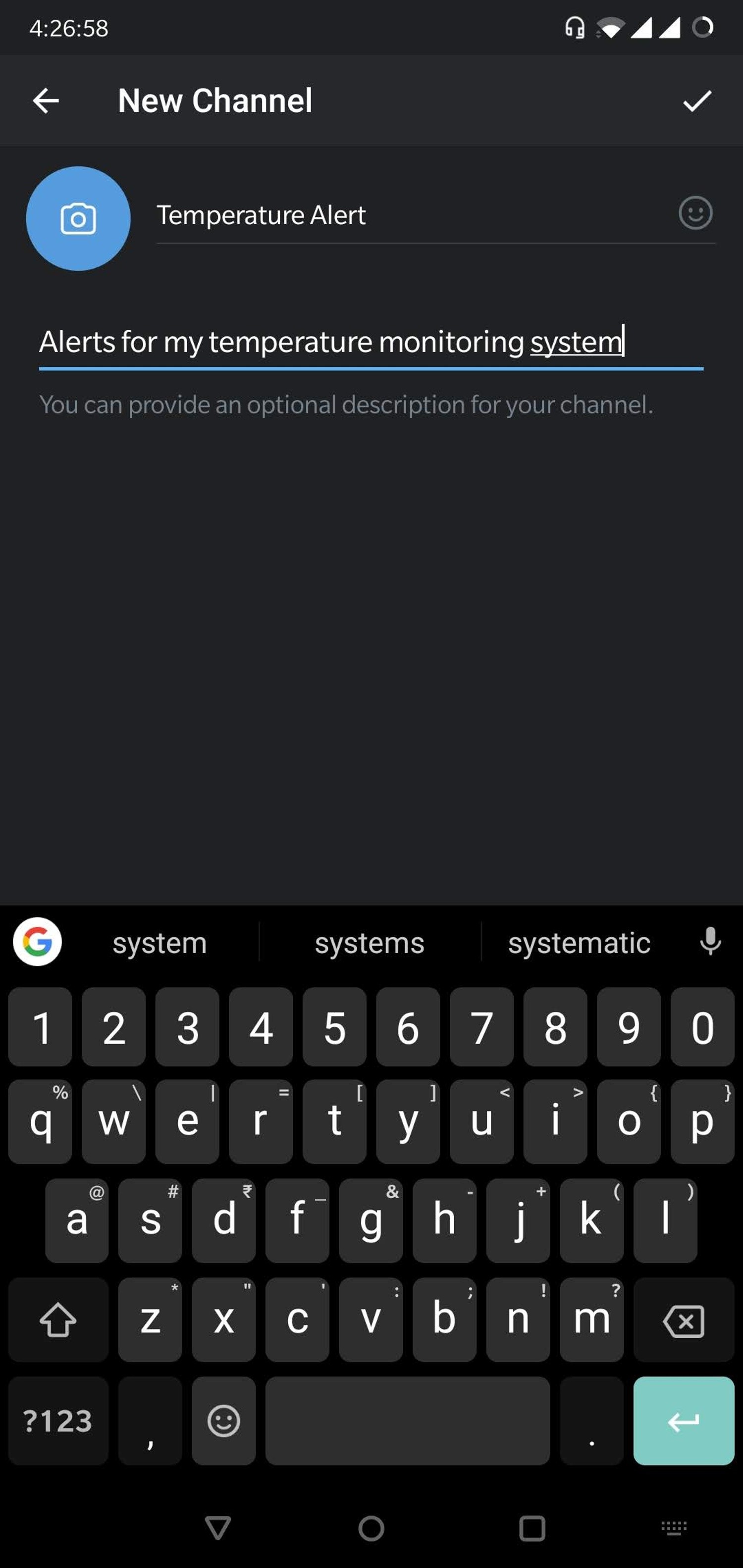
- Será solicitado um nome e uma descrição para o seu canal. Dê um nome e uma descrição adequados. Adicionar foto é opcional.
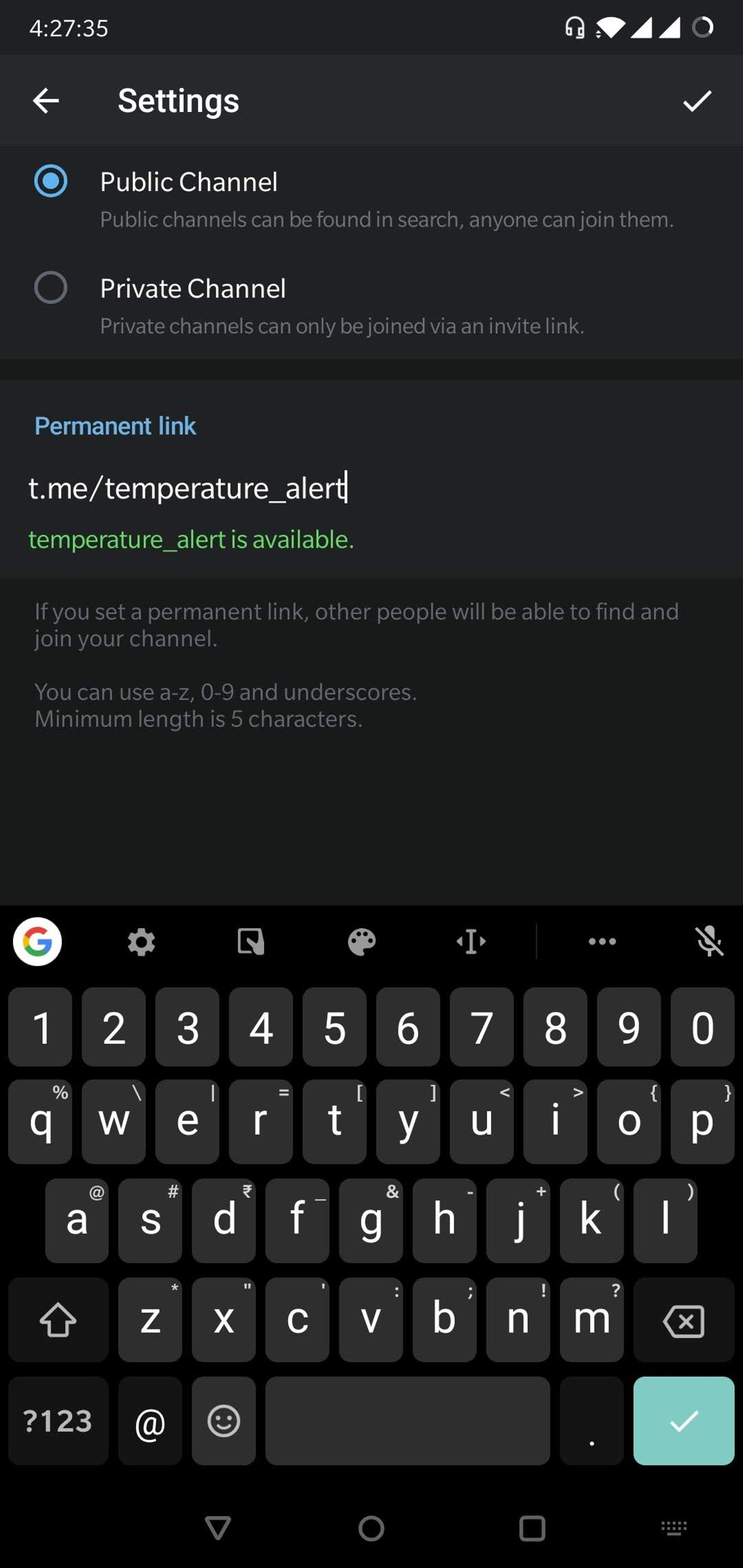
- Na próxima tela, defina o canal como Público.
- Na mesma tela, será solicitado que você insira um link permanente para o seu canal. Você pode usar letras minúsculas e números de 0 a 9 para criar o link do canal.
- Observe que o nome do link do canal é global e você só poderá criar um link do canal se o nome do link estiver disponível. O nome do link do canal é semelhante a um endereço de e-mail, ou seja, apenas um ID de e-mail exclusivo pode existir por vez.
- Você pode manter o nome do link do canal como temperature_alert_ seguido pelo seu ID de e-mail. Exemplo, se meu ID de e-mail for [email protected], posso manter o nome do link do canal como temperature_alert_developer_boltiot_com (Eu removi o símbolo @ e. Uma vez que não era permitido e substituí-o por um sublinhado _) . Isto é apenas uma sugestão. Você pode manter o nome do link do canal como quiser, desde que seja válido.
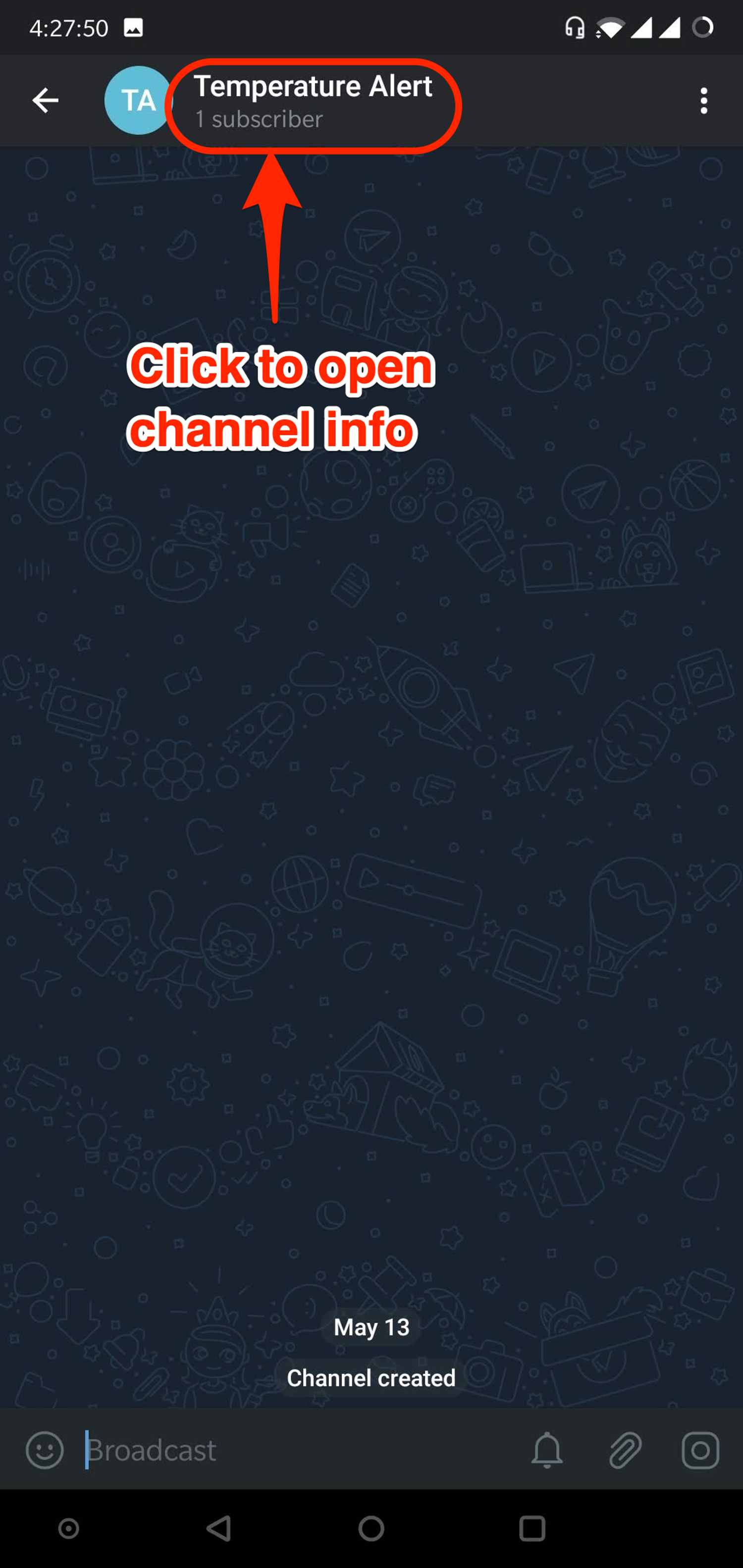
- Anote o nome do link permanente deste canal. Será necessário mais tarde enviar mensagens para este canal. Por exemplo, o nome do link do canal na captura de tela abaixo é " temperatura_alert ".
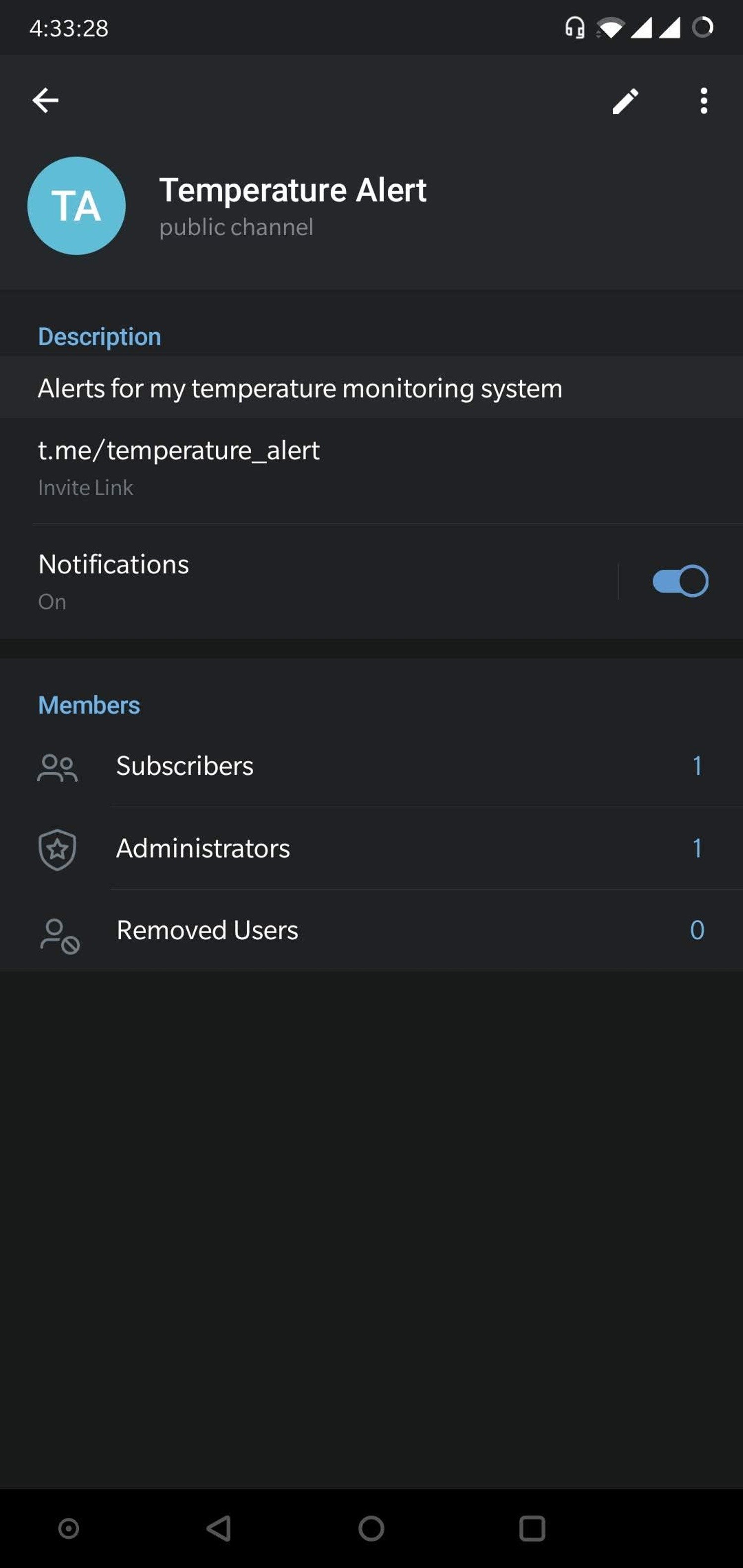
- Parabéns! Você criou um novo canal. Você também pode visualizar este canal na tela inicial do aplicativo.

- Você pode clicar no nome do canal na parte superior para ver mais detalhes sobre ele.
- Em seguida, precisaremos criar e adicionar um bot ao canal para que ele possa postar alertas para nós neste canal.
Crie um bot
O que é um bot?
Bots são aplicativos de terceiros executados dentro do Telegram. Os usuários podem interagir com os bots, enviando-lhes mensagens, comandos e solicitações.
Estaremos utilizando Bots para enviar alertas em nosso canal.
Crie um novo bot
O Telegram nos permite criar um novo bot com a ajuda de um bot chamado "BotFather". É um único bot para criar e gerenciar outros bots.
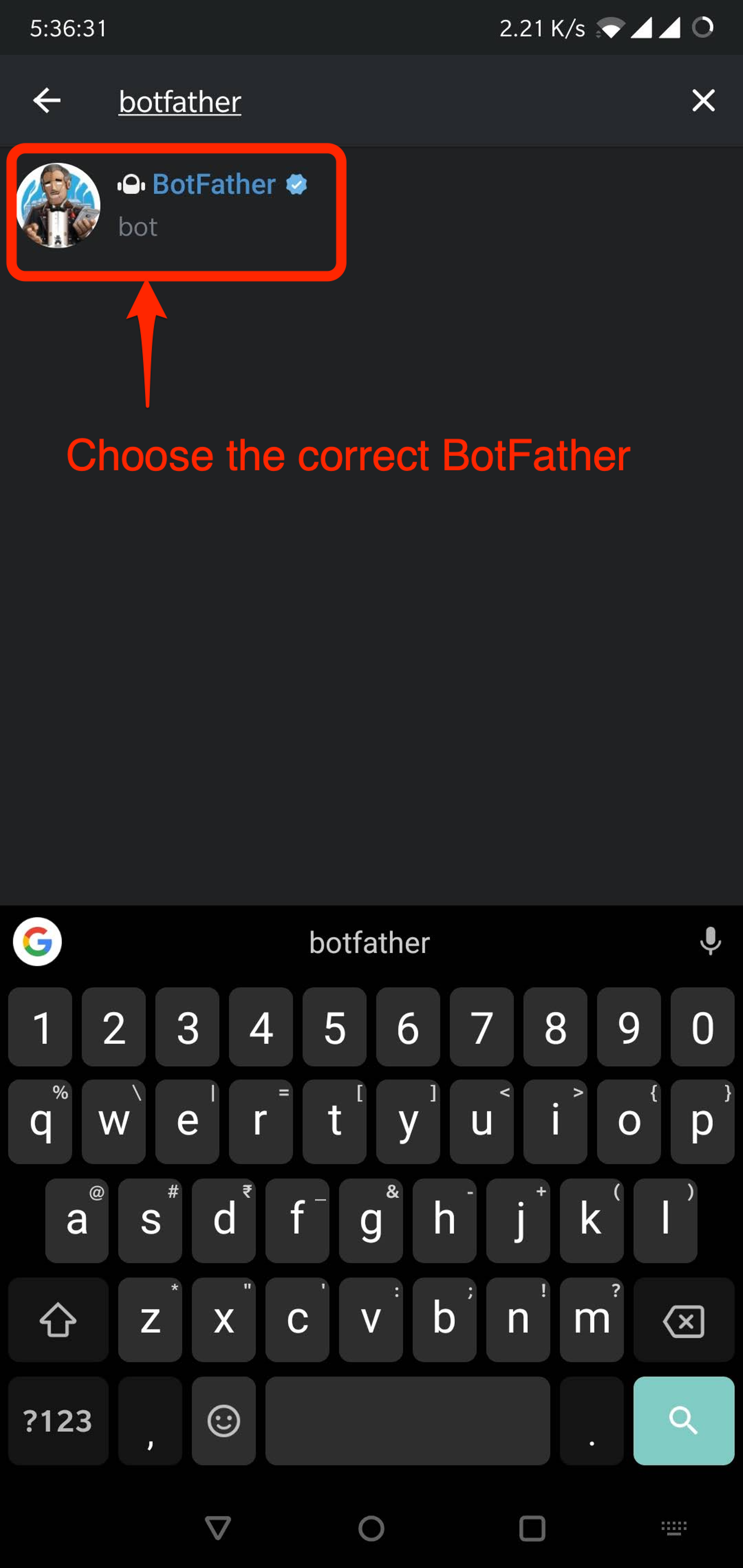
- Na tela inicial do aplicativo, clique no ícone de pesquisa no canto superior direito e digite "botfather".
- Nos resultados da pesquisa, clique no resultado correto para "BotFather" conforme mostrado abaixo. O "BotFather" correto terá uma marca azul ao lado de seu nome. Isso o levará a uma janela de bate-papo com o "BotFather".
- O bate-papo já terá alguns itens e exibirá uma lista de comandos para começar.
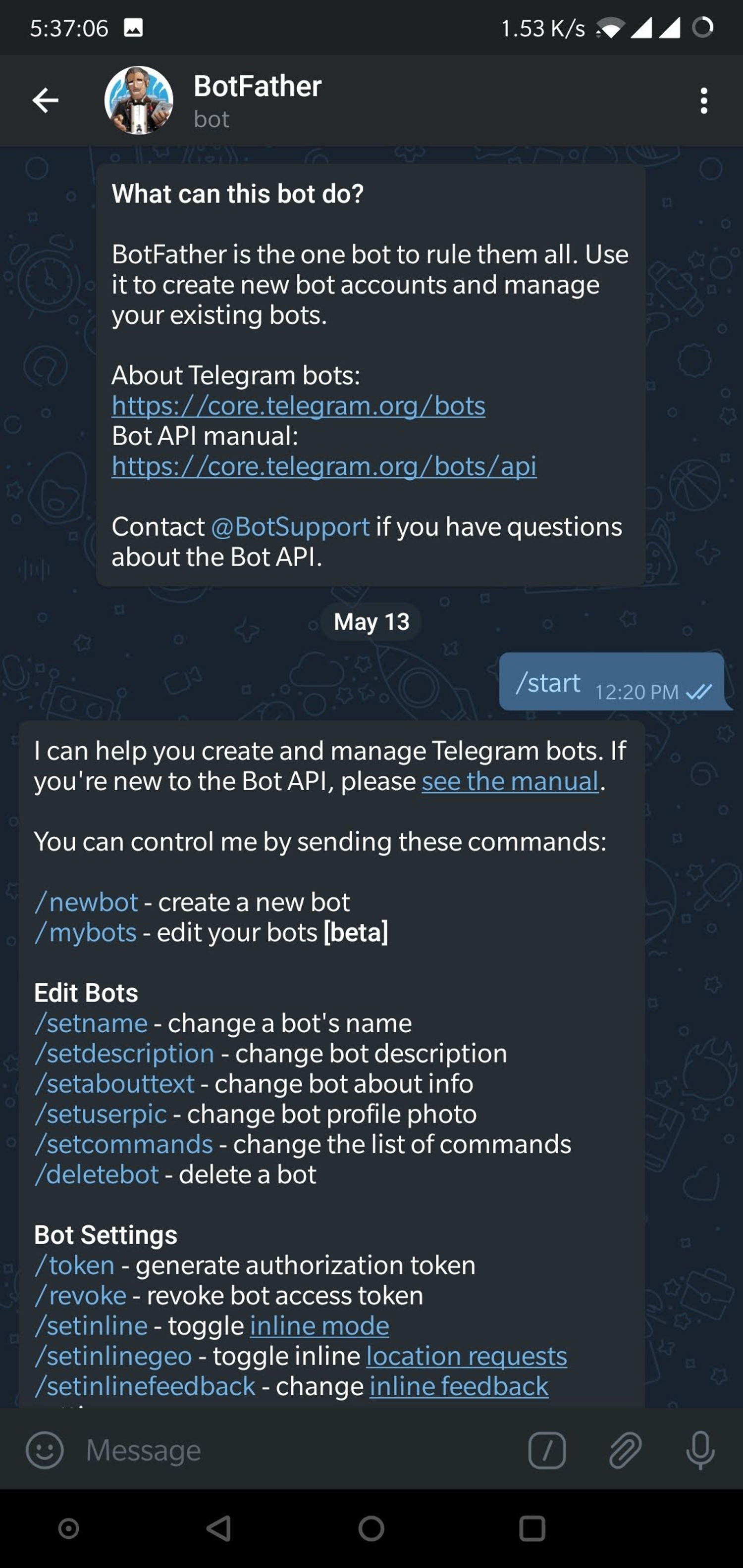
- Como precisamos criar um novo bot, vá em frente e digite "/ newbot" na janela.
- Será solicitado que você digite mais alguns detalhes, como nome e nome de usuário do bot.
- Quando o seu bot for criado com sucesso, será exibida uma tela semelhante à abaixo e conterá o token do bot. Este token é usado para controlar seu Bot, bem como enviar mensagens em nome dele. Por favor, mantenha este token seguro, pois permitirá que qualquer pessoa acesse seu Bot.
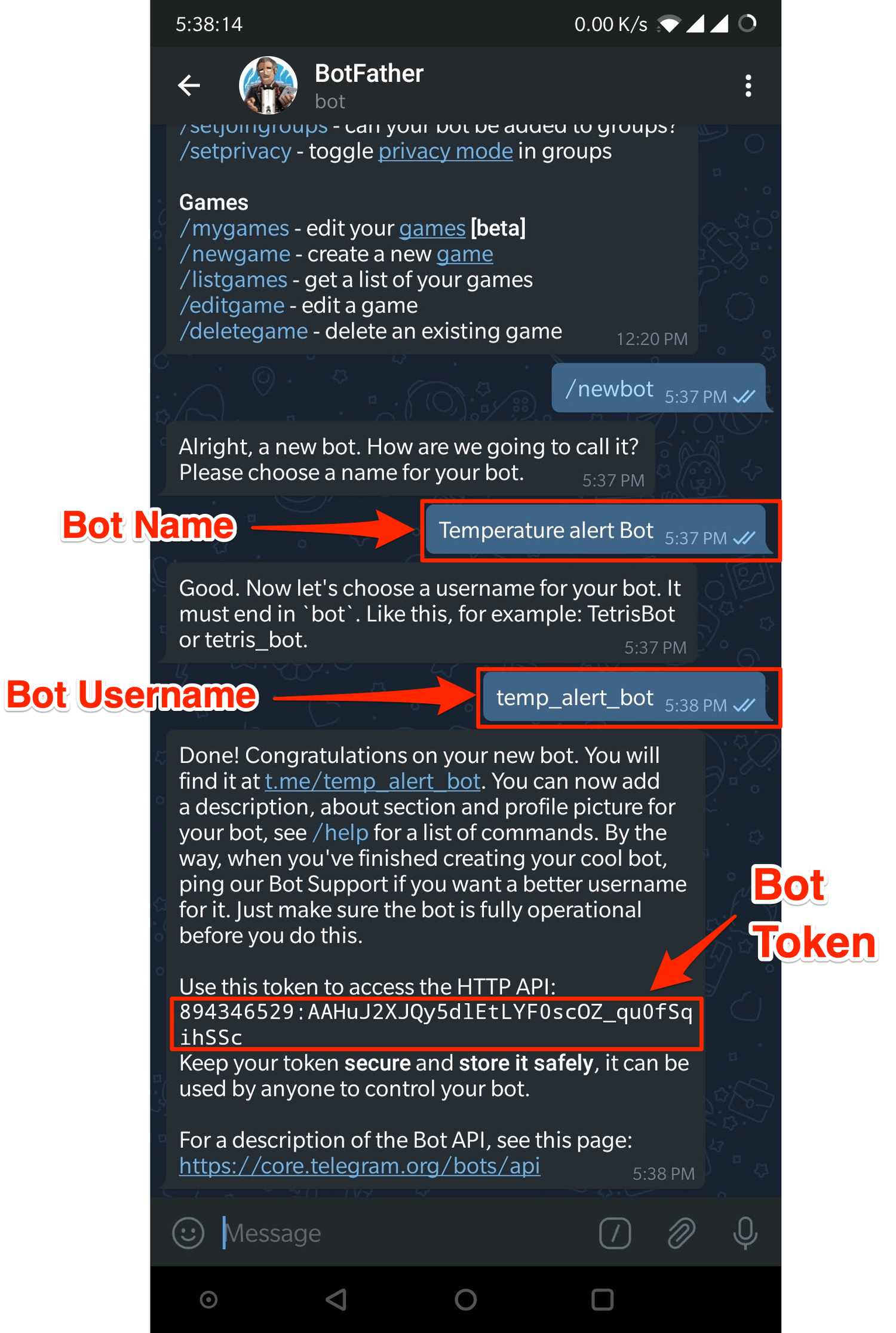
- Na captura de tela acima, o token do bot é "894346529:AAhuJ2XJQy5dlEtLYF0sc0Z_qu0fSqihSSc". Salve-o como telegram_bot_id. O telegram_bot_id é salvo como "bot" seguido pelo token do bot. Portanto, neste exemplo, o telegram_bot_id será "bot894346529:AAhuJ2XJQy5dlEtLYF0sc0Z_qu0fSqihSSc".
- O telegram_bot_id será usado no código python para enviar mensagens. O código Python será ensinado nas últimas lições.
- Além disso, tome cuidado ao salvar o ID do bot. Você pode ficar confuso entre 0 e O, I e 1 etc., pois eles têm aparência semelhante.
- Parabéns, você criou um novo Bot. Agora, precisaremos adicioná-lo ao canal que criamos anteriormente para que possamos enviar alertas.
Adicione o bot ao canal
- Na tela inicial do aplicativo, abra o canal que criamos anteriormente.
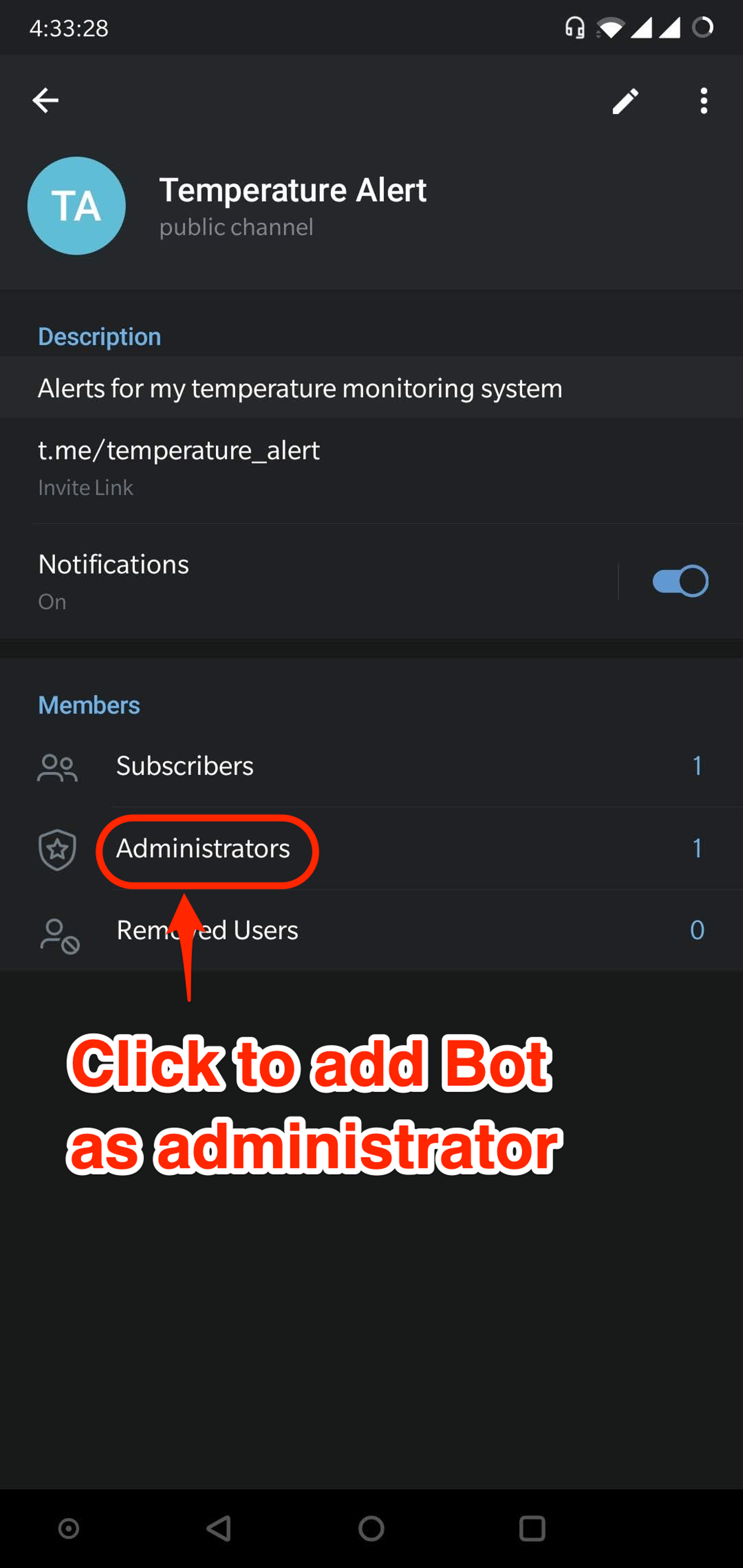
- Na tela, clique no nome do canal na parte superior para abrir as informações do canal.
- Clique no botão Administradores para que possamos adicionar o bot recém-criado ao canal.
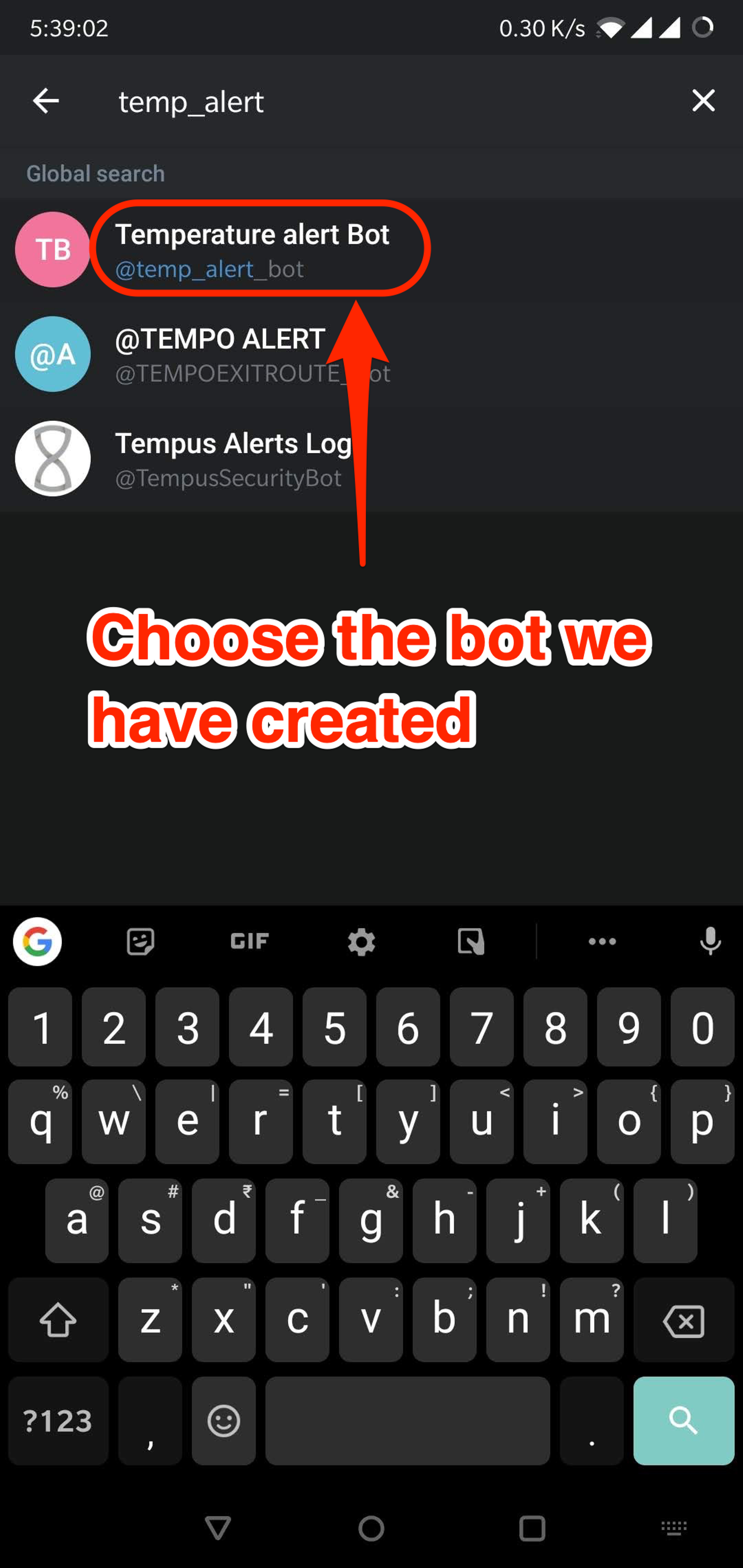
- Procure o bot que criamos usando o nome de usuário do Bot. Depois de encontrar o bot correto, clique nele para adicioná-lo ao canal. Certifique-se de ter clicado no botão Administradores na etapa anterior, pois isso permitirá que nosso bot poste no canal.
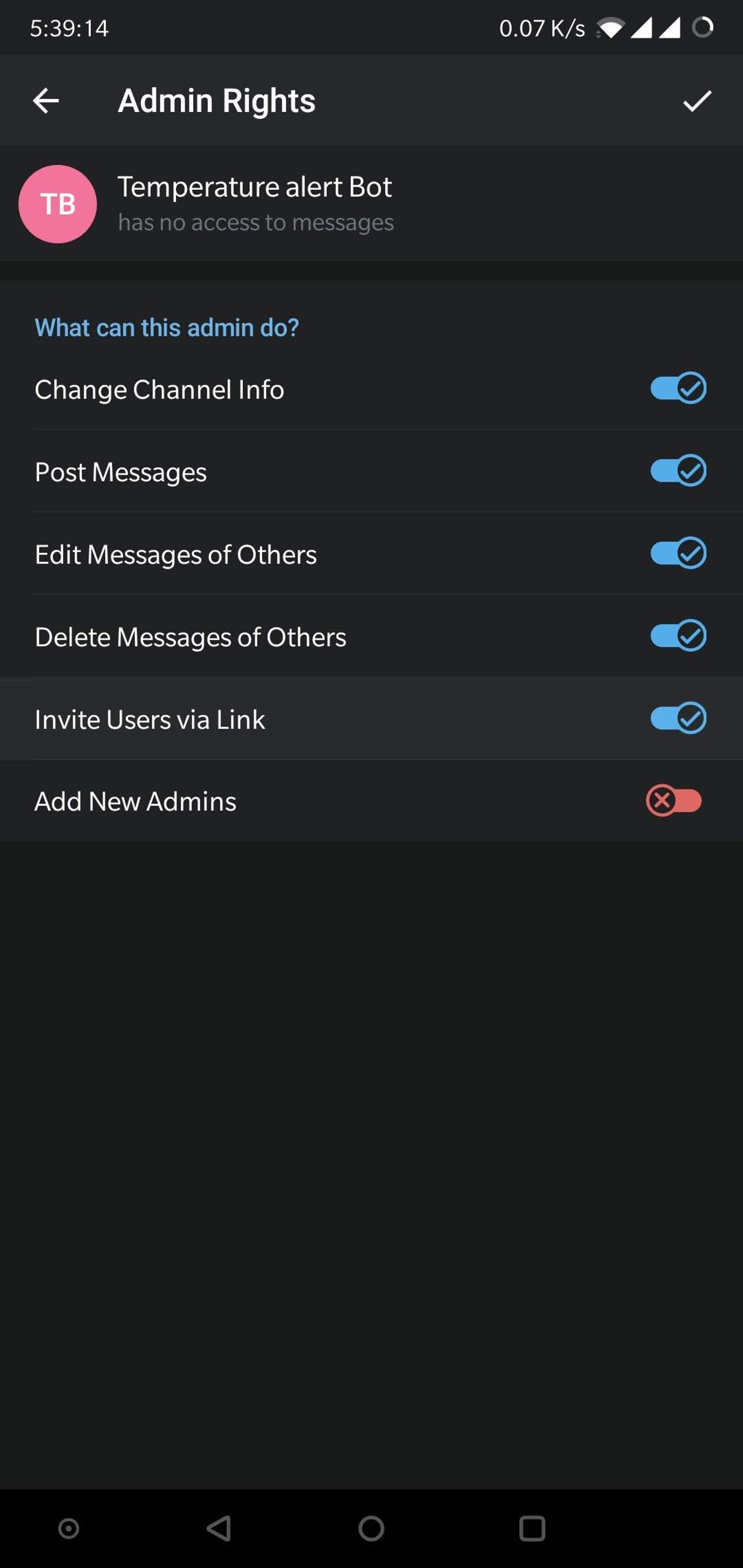
- Você será solicitado a confirmar os direitos do bot. Pressione a marca de seleção no canto superior direito para continuar adicionando o bot ao canal. Certifique-se de que o bot tem direitos para "Postar mensagens".
- Agora você verá o Bot recém-criado na lista de administradores do canal.
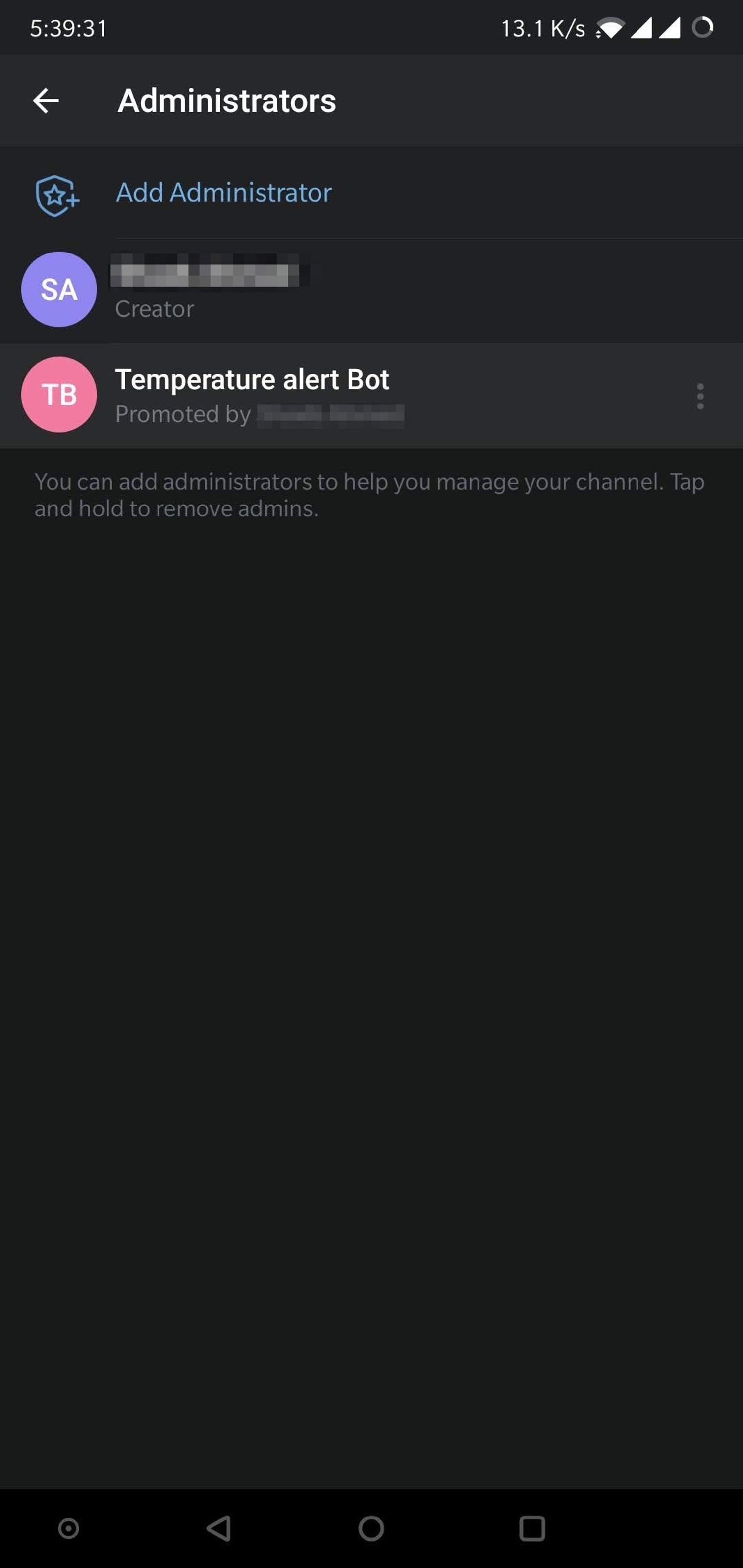
- Agora iremos codificar para enviar mensagens ao canal através do bot.
AGORA CONFIGURANDO A REDE PARA TWILLO E MAIL GUN
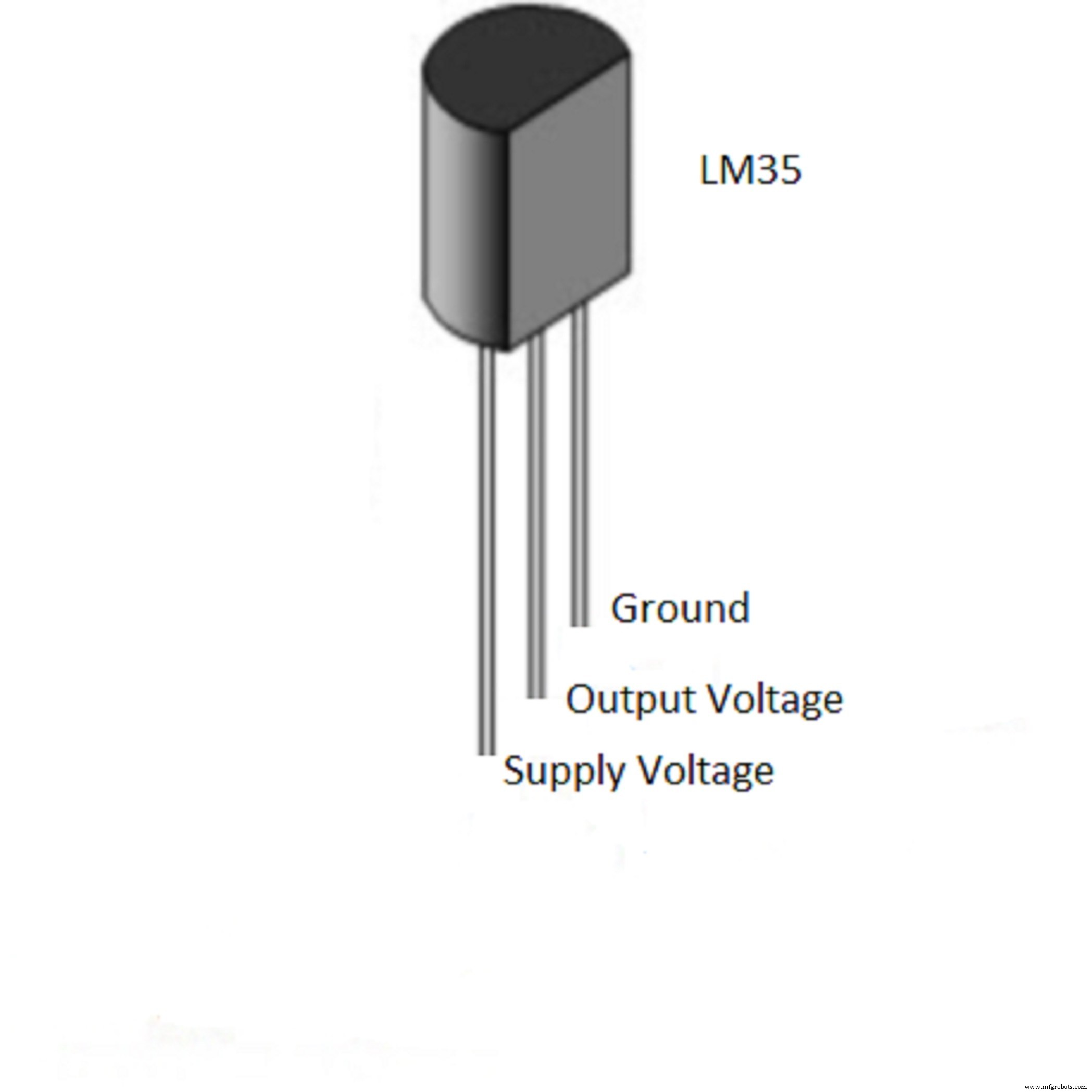
Receba os valores do sensor de temperatura LM35 por SMS e e-mail a qualquer momento no seu celular usando o Google Assistant.

O que você faz quando precisa verificar os valores do sensor do seu projeto Iot a qualquer momento? Você acabou de fazer o login na sua nuvem para verificar isso. Parece simples, certo? Mas e se você tivesse que verificar os valores uma vez a cada hora ou uma vez a cada poucos minutos e isso várias vezes ao dia. Isso seria um pouco (muito) complicado, certo? Agora, imagine um mundo onde você possa obter os valores do sensor por SMS e e-mail apenas dizendo "Envie-me os valores do sensor" para o Google Assistente. Espere, espere, espere. Essa situação não é mais imaginária porque vocês mesmos poderiam fazer isso em poucos passos. Leia mais para descobrir.
Neste projeto, estaremos recebendo os valores do sensor de temperatura do sensor LM35 via SMS e e-mail através de um comando para o Google Assistant.
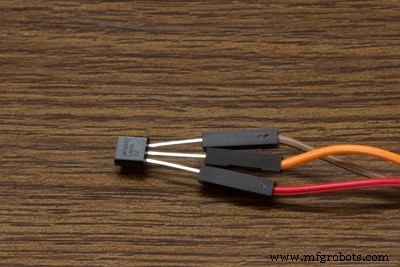
Etapa 1:configuração do hardware
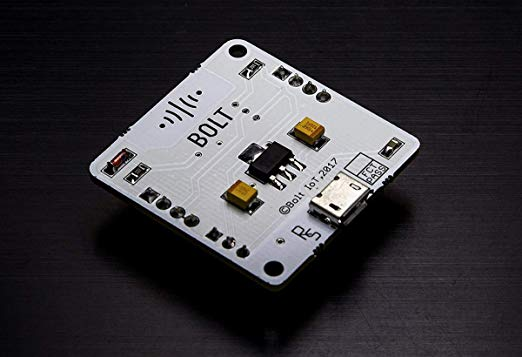
Segure o sensor LM35 em sua mão de forma que o nome fique visível para você. Os três pinos, da esquerda para a direita, são VCC, saída e GND. Conecte os três pinos aos fios fêmea-macho. Conecte os três fios, correspondentes aos três pinos da esquerda para a direita, aos pinos de 5 V, A0 e GND no módulo WiFi Bolt. Conecte o módulo WiFi a uma fonte de alimentação de 5 V. Certifique-se de que ele esteja conectado a uma conexão ativa com a Internet.
Etapa 2:Criação de um módulo IFTTT no Integromat
Faça login em sua conta Integromat. Se você não se inscreveu no Integromat, você pode criar uma conta clicando aqui. Após fazer o login, clique em "Criar um novo cenário" no canto superior direito da tela. Selecione IFTTT, HTTP, Mailgun e Twilio na tela para selecionar as ferramentas necessárias e clique em "Continuar". Em seguida, clique no círculo branco e selecione IFTTT na lista e, em seguida, selecione "Receber dados" no menu. Este módulo é essencial para conectá-lo ao miniaplicativo no IFTTT, que será discutido posteriormente. Clique em "Adicionar" para adicionar um novo Webhook seguido de dar um nome adequado a ele e clique em "Salvar". Agora, você receberá um URL ou link. Salve-o para outros fins.

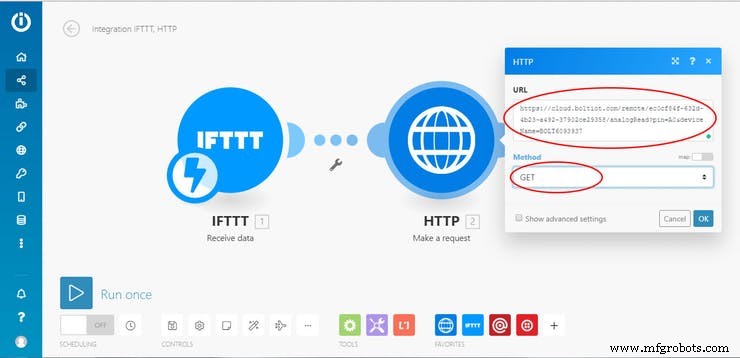
Etapa 3:Criação de um módulo HTTP no Integromat
Em seguida, clique no símbolo "+" anexado ao módulo para adicionar um novo módulo. Selecione "HTTP" seguido de "Fazer uma solicitação". Isso é necessário para receber os valores do sensor da Bolt Iot Cloud. No URL, cole o link https://cloud.boltiot.com/remote/your-bolt-iot-api-key/analogRead?pin=A0&deviceName=BOLTXXXXXXX. Substitua "your-bolt-iot-api-key" e "BOLTXXXXXXX" com suas respectivas credenciais, que você pode encontrar facilmente em sua Bolt Iot Cloud. Deixe o método ser "GET" e clique em "OK".
O link acima é usado para buscar os valores do sensor da Bolt Iot Cloud. A saída do link acima terá a forma de {"valor":"XXX", "sucesso":"1"} onde XXX são os valores do sensor.
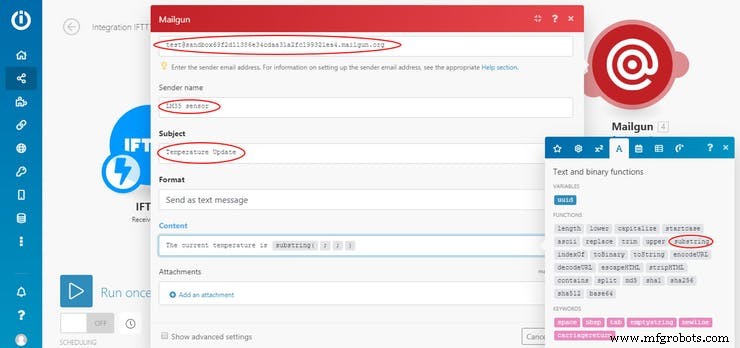
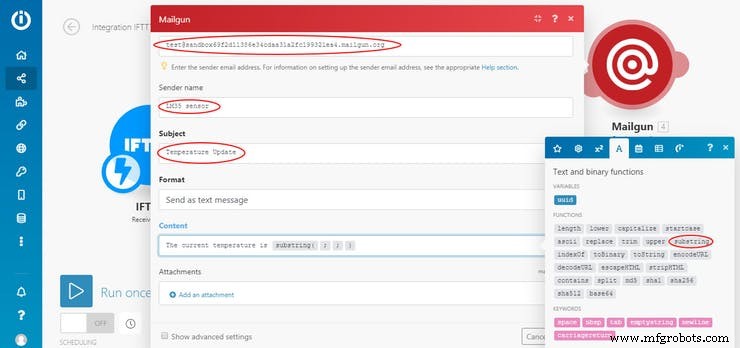
Etapa 4:Criando um módulo Mailgun no Integromat
Agora, clique novamente em "+" e digite "Controle de Fluxo" na caixa de pesquisa e selecione-o seguido de "Roteador". Dois círculos brancos devem ser feitos. Clique no primeiro círculo branco e selecione "Mailgun" seguido de "Enviar um e-mail". Aqui, o Mailgun é usado para receber o e-mail com a temperatura. Se você já possui uma conta no Mailgun, deve ter a chave API e o nome de domínio, que podem ser facilmente encontrados em sua conta do Mailgun. Se você não tiver uma conta no Mailgun, poderá seguir a Etapa alternativa fornecida abaixo. Preencha os detalhes necessários conforme solicitado. Digite o e-mail do destinatário (que é o seu endereço de e-mail). No campo "Remetente", digite "test @ yourdomainname". Na seção "Conteúdo", precisamos escrever o valor da temperatura e não o valor do sensor. Para converter o valor da temperatura para o valor do sensor, precisamos dividir o número por 10,24. Para obter o valor do sensor no formato XXX, precisamos eliminar todos os outros caracteres para os quais usamos a função "substring". Clique no símbolo "A" na caixa de diálogo ao lado e selecione "substring".
No primeiro espaço dentro dos colchetes, clique na opção "Dados" sob o símbolo da estrela seguido de "11" e "14" no segundo e terceiro espaço. Estritamente falando, este não é o método certo para buscar o valor do sensor, então estou usando um hack para conseguir. Se alguém souber o caminho certo, pode mencionar o método na seção de comentários abaixo.
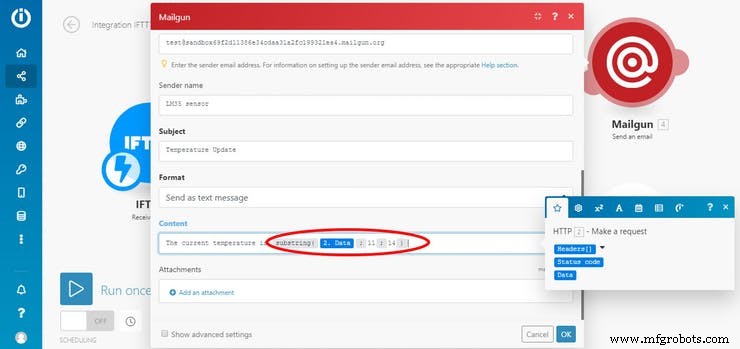
O último é feito para capturar apenas o "XXX" da saída. Este número é então dividido por 10,24

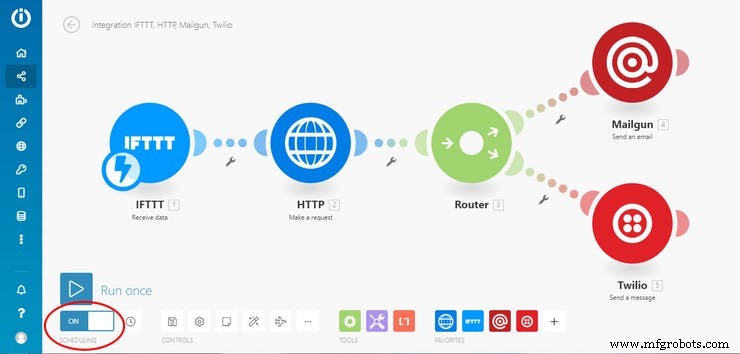
Before saving the scenario, don't forget to switch on the "Scheduling" which is at the bottom of the screen and select the "Run scenario" as "Immediately". Your final scenario should look like this.
Step 6 :Making a new Applet in IFTTT
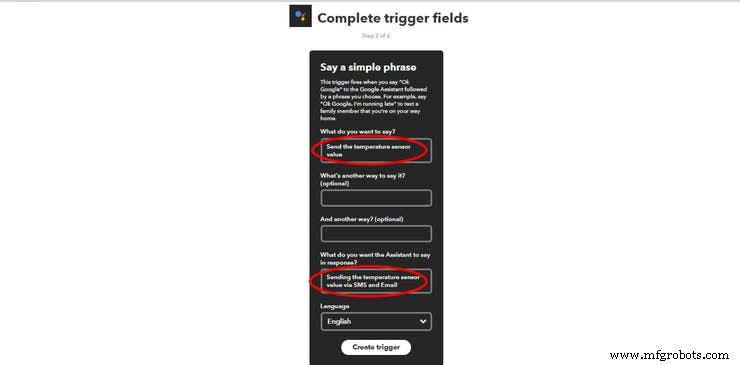
Login to your IFTTT account. If you haven't signed up on IFTTT, then you can create an account by clicking here. After logging in, click on "New Applet" under the "My Applets" section. Click on "+this" followed by "Google Assistant" after searching for it in the search box. Click on "Say a simple phrase" in the following screen. Type the command for which you want to trigger the required action.
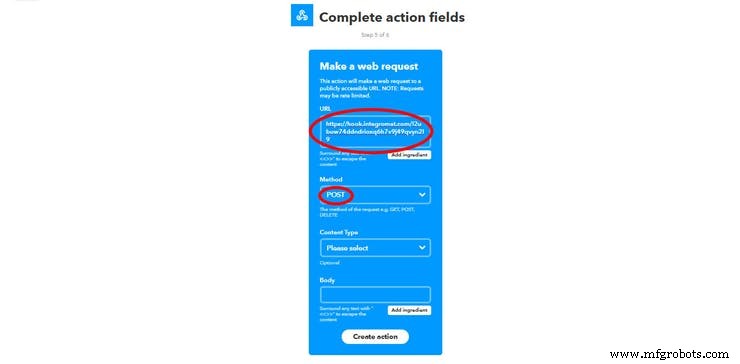
Click on "Trigger" followed by "+that". Search for "Webhooks" in the search box and select it followed by selecting "Make a web request" in the following screen. In the URL field, paste the link which we got in Step 2 after creating an IFTTT module in Integromat. This step is very essential to run the scenario in Integromat when you say the command to Google Assistant. Afterwards, select "POST" in method and click on "Create Action". Write a suitable name for the applet and select "Finish".
É isso. Now see the magic when you take out your mobile phone and say "Ok Google, send the temperature sensor value."
Schematics
Connecting female-to-male wires to LM35 sensor
Connecting female-to-male wires to the Bolt WiFi module
Final connection

THAT'S IT NOW UPLOAD EVERY THING AND THEN CHECK.
IF ANY DOUBTS CONTACT ME BY COMMENT SECTION.
THANK YOU....................................
Código
- FINAL RECEIVER
- FINAL TRANSMITER
FINAL RECEIVERArduino
#include#include #include #include #include #include Servo servo;RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int servo_pin =9;int sensor_pin=A0;int output_value;void setup() { Serial.begin(9600); radio.begin(); servo.attach (servo_pin ); radio.openReadingPipe(0, address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.startListening();}int pos;void loop() { if (radio.available()) { radio.read(&pos, sizeof(pos)); Serial.println(pos); if(pos==100) { digitalWrite(6,LOW); digitalWrite(5,LOW); digitalWrite(4,LOW); digitalWrite(3,LOW); // Serial.println("gk0"); } else if (pos==200){ digitalWrite(6,HIGH); digitalWrite(5,LOW); digitalWrite(4,HIGH); digitalWrite(3,LOW); atraso (10); // Serial.println("gk1"); } else if (pos==300){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); digitalWrite(4,LOW); digitalWrite(3,HIGH); atraso (10); // Serial.println("gk2"); } else if (pos==400){ digitalWrite(6,LOW); digitalWrite(5,HIGH ); digitalWrite(4,HIGH); digitalWrite(3,LOW); atraso (10); // Serial.println("gk3"); } else if (pos==500){ digitalWrite(6,HIGH); digitalWrite(5,LOW ); digitalWrite(4,LOW); digitalWrite(3,HIGH); atraso (10); // Serial.println("gk5"); } else if (pos==600){ servo.write(90); atraso (10); // Serial.println("gk6"); } else if (pos==700){ servo.write(180); atraso (10); // Serial.println("gk7"); } } else { Serial.println("connection lost"); }}
FINAL TRANSMITERArduino
#include#include #include #include #include RF24 radio(7, 8); // CSN, CEconst byte address[6] ="00001";int x_key =A1; int y_key =A0; int p_key =A3; int q_key =A2; int x_pos;int y_pos;int p_pos;int q_pos;void setup() { radio.begin(); radio.openWritingPipe(address); radio.setPALevel(RF24_PA_MIN); radio.setChannel(87); radio.setDataRate(RF24_250KBPS); radio.stopListening(); Serial.begin(9600); pinMode (x_key, INPUT); pinMode (y_key, INPUT); pinMode (p_key, INPUT); pinMode (q_key, INPUT); }int pos;void loop() { x_pos =analogRead (x_key); y_pos =analogRead (y_key); p_pos =analogRead (p_key); q_pos =analogRead (q_key); Serial.println(x_pos); Serial.println(y_pos); Serial.println(p_pos); Serial.println(q_pos); if (p_pos>400 &&p_pos<600 &&q_pos>400 &&q_pos<600) { if(x_pos>400 &&x_pos<600 &&y_pos>400 &&y_pos<600) { pos=100; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos<400) { pos=200; radio.write(&pos, sizeof(pos)); } if(x_pos>400 &&x_pos<600 &&y_pos>600) { pos=300; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos<400) { pos=400; radio.write(&pos, sizeof(pos)); } if(y_pos>400 &&y_pos<600 &&x_pos>600) { pos=500; radio.write(&pos, sizeof(pos)); } Serial.println(pos); delay(100);}else if(p_pos<400 || p_pos>600){ if(p_pos<400) { pos=600; radio.write(&pos, sizeof(pos)); } if(p_pos>600) { pos=700; radio.write(&pos, sizeof(pos)); } delay(100);}}
Esquemas
Processo de manufatura