


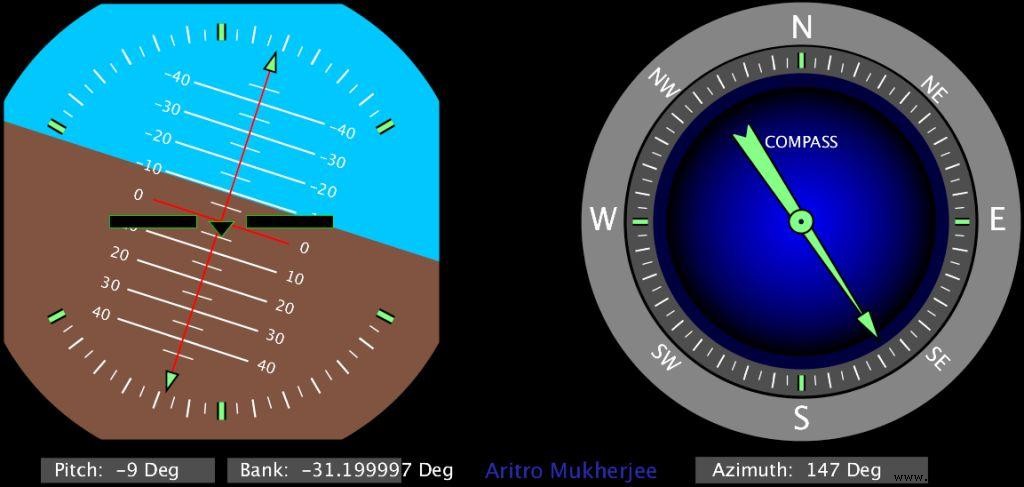
Visualizando o movimento 3D do sensor IMU
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Antes de mergulhar na parte do software, vamos montar nossos kits de hardware.
O que é um sensor MPU-6050 Os dispositivos MPU-6050 combinam um giroscópio de 3 eixos e um acelerômetro de 3 eixos na mesma matriz de silício, junto com um Digital Motion Processor (DMP) integrado , que processa o complexo MotionFusion de 6 eixos algoritmos. Então, agora você será capaz de decifrar o significado de 6DOF- 6 graus de liberdade.
Para obter os detalhes sobre o esquema de conexão e configuração de hardware, consulte meu blog anterior.
Agora, vamos ao software de processamento, que facilitará a visualização 3D deste sensor de movimento.
Software necessário:
- ProcessandoIDE
Considerando que você já instalou o ArduinoIDE envolvendo dois IDEs separados, você pode se sentir um pouco confuso. Bem, não há necessidade de pânico. Siga os passos abaixo e todas as suas dúvidas serão esclarecidas!
O processamento é bastante semelhante ao ArduinoIDE, exceto por algumas funções especializadas. Então, você verá uma influência / semelhança no ProcessingIDE.
A Figura 1 e a Figura 2 tornarão minhas afirmações claras.

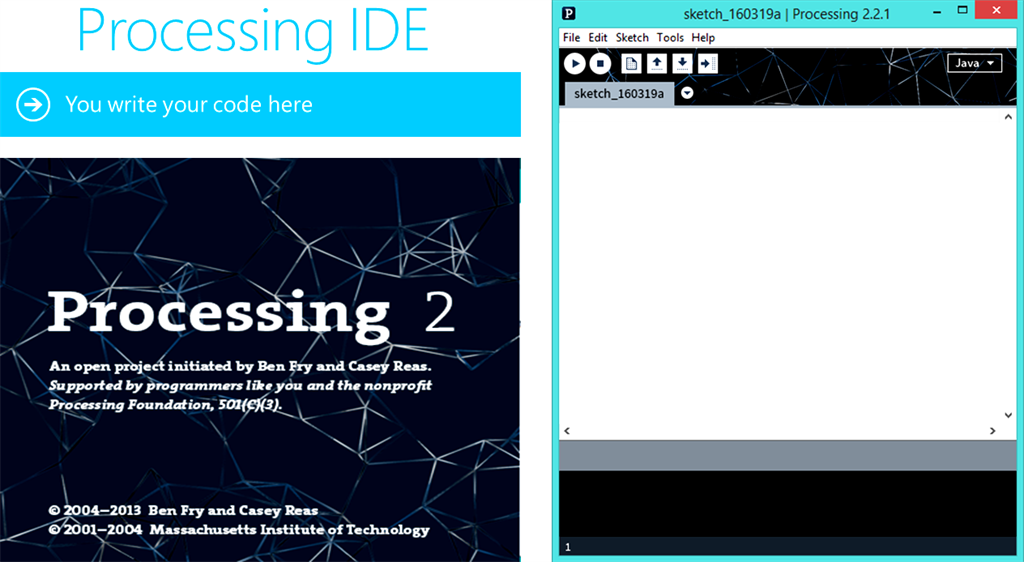
Portanto, vemos que há uma semelhança visual impressionante em ambos os IDEs. Agora que instalou o IDE de processamento, você precisa baixar uma biblioteca especial chamada "Toxi" para fins de processamento. Localizar um arquivo "Toxi" pode ser muito agitado na rede mundial de computadores. Portanto, tornei mais fácil para você enviá-lo para o meu github. Clique neste link e baixe o arquivo denominado “toxiclibs-complete-0020”. Em seguida, extraia a pasta. Copie o "toxiclibs-complete-0020" pasta e cole-o em "bibliotecas" pasta de Processing.Cant localizar " pasta de bibliotecas "? então, faça um! sim. se você não conseguir encontrar uma" bibliotecas "pasta, crie uma pasta e nomeie-a como" bibliotecas ". Agora, cole o seu " toxiclibs-complete-0020 " dentro dela. Seguindo essas etapas corretamente, execute o IDE de processamento. Hora de codificar! Para visualizar a visualização 3D, você precisa primeiro fazer o upload do código do Arduino para MPU-6050 (extrair o arquivo .ino da pasta MPU6050_DMP6.rar). Depois de fazer isso, você precisa fazer algumas alterações conforme abaixo. Você precisa comentar este código que diz:
#define OUTPUT_READABLE_YAWPITCHROLL por // #define OUTPUT_READABLE_YAWPITCHROLL da mesma forma, descomente o código que diz:
// # define OUTPUT_TEAPOT por #define OUTPUT_TEAPOT A seguir, abra o exemplo de processamento do MPU-6050. Vá para a barra de ferramentas, clique em Arquivo -> Abrir. Em seguida, navegue até a pasta onde você instalou a biblioteca MPU-6050 para Arduino. Você pode localizar facilmente o exemplo de processamento:siga a sequência do fluxo:MPU6050> Exemplos> MPU6050_DMP6> Processamento> MPUTeapot. Como você fez no caso do ArduinoIDE, da mesma forma, verifique a porta serial que está definida nele. Agora, verifique o código. Você verá que, por padrão, a linha o define para linux / mac usuários como:
String portName ="/ dev / ttyUSB1"; Você precisa alterar String portName para a porta na qual seu Arduino está conectado. Consulte a Figura 3.

Para janelas usuários, comente este código como:
// String portName ="/ dev / ttyUSB1"; Da mesma forma, descomente este código como:
// String portName ="COM15"; por String portName ="COM15"; Substitua " COM15 "com a porta COM à qual o seu arduino está conectado (verifique isso acessando arduino e Ferramentas -> Porta serial). Então, finalmente a configuração está concluída, agora é apenas uma questão de minutos! Faça upload do código do Arduino (MPU6050_DMP6) por meio do Arduino. Observação: NÃO ABRA O MONITOR SERIAL enquanto o processo estiver em andamento. (Por quê? Porque visualizaremos o código no ProcessingIDE em vez do ArduinoIDE)
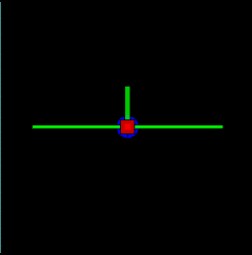
Em seguida, execute o código de processamento (MPUTeapot) pressionando o botão "reproduzir" símbolo. Você verá um pequeno plano como um objeto. Aguarde cerca de 10-12 segundos para que os valores de MPU-6050 se estabilizem. Depois disso, você verá o modelo 3D se movendo de acordo com o sensor MPU-6050. Consulte o GIF abaixo. Para melhor compreensão, acesse o YouTube
Projete seus próprios instrumentos de simulador de vôo personalizados em meu próximo tutorial.
Comente abaixo, se você está enfrentando algum problema em relação à configuração do hardware / software.
Código
Código do projeto completo
Baixe esta pasta e siga as instruções que foram especificadas neste tutorial.https://github.com/AritroMukherjee/MPU5060sensor/blob/master/MPU6050.zipEsquemas
Siga minha postagem anterior no blog para um tutorial passo a passo sobre como configurar um sensor IMU (MPU-6050) com um Arduino. Link (https://www.hackster.io/Aritro/getting-started-with-imu-6-dof-motion-sensor-96e066)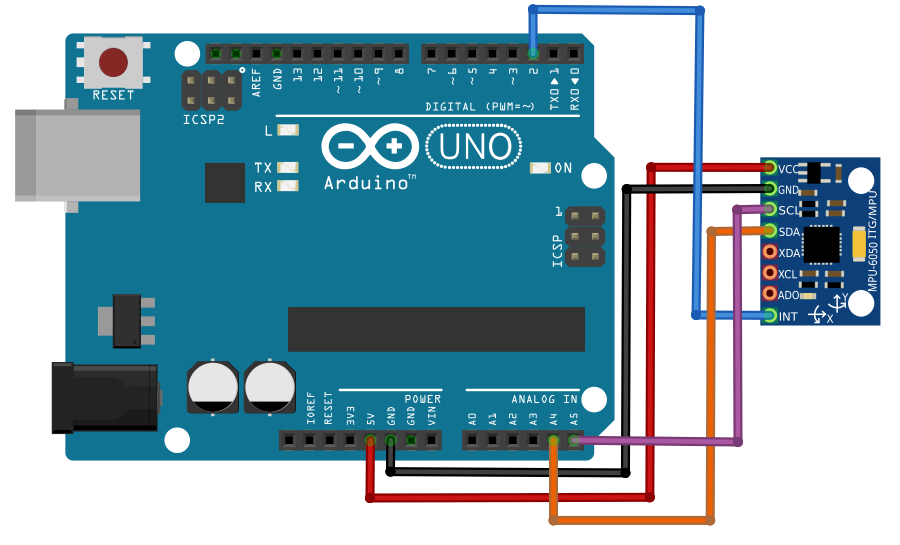
Processo de manufatura
- Logic-X lança nova marca de produtos de processamento de sensores COTS
- Visão computacional como sensor de movimento para SmartThings
- Sensor de movimento, alarme, gravação de vídeo em HA no Raspberry Pi
- Sistema de sensor de movimento infravermelho faça você mesmo para Raspberry Pi
- Sensor de movimento usando Raspberry Pi
- Sensor de temperatura Raspberry Pi
- Raspberry Pi GPIO com sensor de movimento PIR:Melhor tutorial
- Interface do sensor de movimento HC-SR501 PIR com Raspberry Pi
- Sensor de emoção / EEG
- Sensor eletrônico de pele decodifica o movimento humano