


Sonar Arduino
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 |
Sobre este projeto
Visualização da tela do radar para HC-SR04
Código Arduino:
Envia leituras do sensor para cada grau movido pelos valores do servo enviados para a porta serial para serem coletados pelo processamento
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
Código de processamento:
Mapeia uma área do que o HC-SR04 vê de uma vista de cima para baixo. Faz e exibe 2 leituras, uma da esquerda para a direita e uma da direita para a esquerda. Exibe uma média das 2 leituras
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
Qualquer dúvida é bem vinda!
Github:https://github.com/faweiz
Portfolium:https://portfolium.com/faweiz
Linkedin:https://www.linkedin.com/in/faweiz
Código
- Arquivo sem título
Arquivo sem título Arduino
/*https://www.hackster.io/faweiz/arduino-radarRadar Visualização da tela para HC-SR04 Envia leituras do sensor para cada grau movido pelos servovalores enviados para a porta serial para serem coletados pelo Processamento * / # incluir#include #define TRIGGER_PIN 2 // Arduino pino 2 amarrado ao pino de disparo no sensor ultrassônico. # Define ECHO_PIN 3 // Arduino pino 3 amarrado ao pino eco no sensor ultra-sônico. # Define MAX_DISTANCE 150 // Distância máxima para a qual queremos pingar (em centímetros). A distância máxima do sensor é avaliada em 400-500cm. # Define SERVO_PWM_PIN 9 // define o servo para o pino 9 do Arduino // significa -ângulo .. ângulo # define ANGLE_BOUNDS 80 # define ANGLE_STEP 1 int ângulo =0; // direção do movimento do servo // -1 =para trás, 1 =para a frente int dir =1; Servo myservo; sonar NewPing (TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); void setup () {Serial.begin (9600); // inicializa a porta serial:myservo.attach (SERVO_PWM_PIN); // define o servo para o pino 9 do Arduino} void loop () {delay (50); // devemos renormalizar para valores positivos, porque o ângulo é de -ANGLE_BOUNDS .. ANGLE_BOUNDS // e o valor do servo deve ser positivo myservo.write (angle + ANGLE_BOUNDS); // lê a distância do sensor e envia para serial getDistanceAndSend2Serial (angle); // calcula o ângulo if (angle> =ANGLE_BOUNDS || angle <=-ANGLE_BOUNDS) {dir =-dir; } ângulo + =(dir * ANGLE_STEP); } int getDistanceAndSend2Serial (ângulo interno) {int cm =sonar.ping_cm (); Serial.print (ângulo, DEC); Serial.print (","); Serial.println (cm, DEC); }
Código
https://github.com/faweiz/My-Arduino/tree/master/arduino_radarArduino_radar_server_arduino.ino
Arduino_radar_client_processing.pde
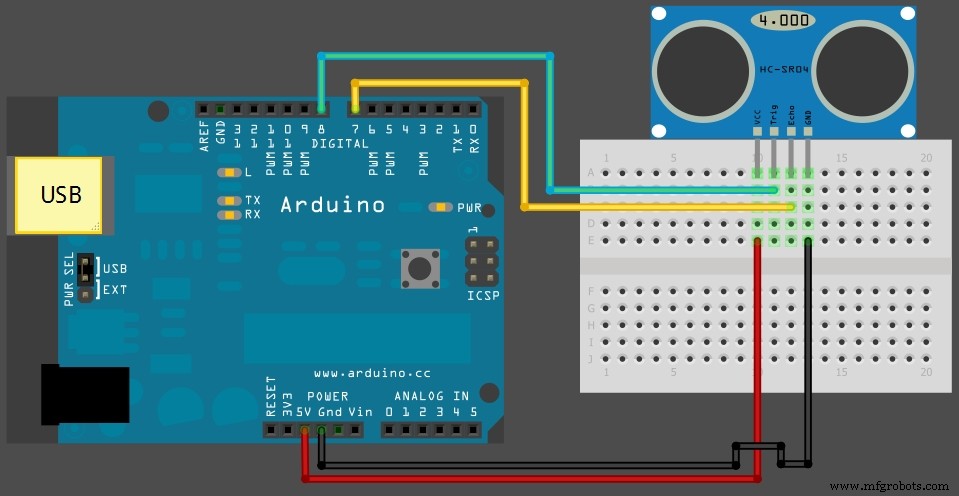
Esquemas
Processo de manufatura