


Os 5 passos para alcançar a formação incremental robótica de qualidade
A conformação incremental robótica é econômica para a conformação de chapas em pequenos lotes. Este estudo de caso mostra como uma equipe alcançou qualidade com o RoboDK.
Mario Guillo e sua equipe são pesquisadores do Institut Maupertuis, na França, especializado em pesquisa industrial.
A equipe notou alguns problemas com os métodos tradicionais de conformação de chapas metálicas… e eles decidiram resolver esses problemas.
Por que a formação de folhas em pequenos lotes é cara
A conformação de chapas metálicas é um jogo de números. Se você estiver fabricando um grande número de peças idênticas, o custo e o tempo geralmente serão equilibrados. No entanto, se você estiver fazendo apenas uma ou duas peças, rapidamente se tornará antieconômico.
Desenho profundo é um dos métodos mais comuns de formação de folhas. Envolve projetar e fabricar uma matriz e, em seguida, “esticar” lentamente cada folha de material sobre a matriz. Quando você está fazendo apenas algumas peças, o custo da matriz supera amplamente o custo da formação em si.
Tradicionalmente, a forma como a maioria dos fabricantes lida com esse problema é apenas aceitá-lo. “Bem, é a vida”, você diz. Você cruza os dedos e espera que o resto de nossas operações de usinagem equilibrem esse processo ineficiente. Ou, se a qualidade não for importante, você pode optar por moldar a folha à mão.
Mario e sua equipe decidiram que não precisa ser assim. Existe um método para formar produtos de qualidade que é econômico para pequenos lotes:a formação incremental.
Neste estudo de caso, mostramos como Mario e sua equipe usaram o RoboDK para criar economicamente produtos de qualidade com formação incremental robótica.
O que é Formação Incremental Robótica?
 A conformação incremental (também conhecida como conformação incremental de chapa) é uma alternativa à estampagem profunda que envolve a deformação do material da chapa pouco aos poucos, camada por camada. Desta forma, é um pouco como impressão 3D ou usinagem CNC. Em vez de adicionar ou remover material em cada camada, o material da folha é levemente dobrado em cada camada.
A conformação incremental (também conhecida como conformação incremental de chapa) é uma alternativa à estampagem profunda que envolve a deformação do material da chapa pouco aos poucos, camada por camada. Desta forma, é um pouco como impressão 3D ou usinagem CNC. Em vez de adicionar ou remover material em cada camada, o material da folha é levemente dobrado em cada camada.
Desde a década de 1990, a conformação incremental tem sido obtida usando máquinas CNC modificadas. A ferramenta CNC é substituída por uma esfera de ponto único que desenha a forma desejada no material da folha para cada camada. Um lubrificante é usado para reduzir o efeito do atrito.
As máquinas CNC modificadas são uma boa solução, mas têm um problema:são caras para peças maiores. Isso pode torná-lo inviável para empresas que desejam usar a conformação incremental para prototipagem, que é uma aplicação comum.
A formação incremental robótica supera esse problema usando um robô industrial para segurar a ferramenta. Ele compartilha semelhanças com a usinagem de robôs que apresentamos em uma postagem anterior.
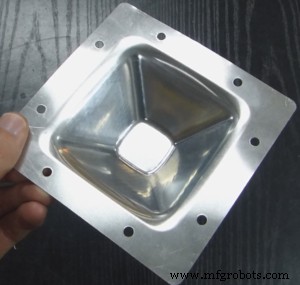
Ao contrário das máquinas CNC, o robô não limita o tamanho da peça. Como resultado, a equipe de Mario acredita que a formação incremental robótica pode ser usada para uma ampla gama de aplicações que exigem a formação de grandes folhas, incluindo implantes cranianos, próteses e painéis automotivos.
5 etapas para alcançar a qualidade da formação incremental robótica
A formação incremental robótica é surpreendentemente fácil... mas somente se você seguir os passos certos. A equipe usou as cinco etapas a seguir (conforme descrito em seu trabalho de pesquisa) para obter um produto de qualidade com formação incremental robótica:
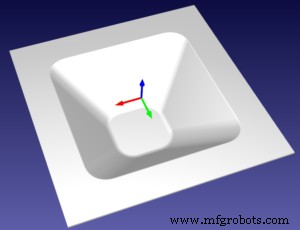
1. Construir o modelo 3D
Quase todos os produtos são projetados em pacotes CAD (Computer Aided Design), portanto, esta etapa deve ser simples. Você precisa definir a forma que deseja fabricar e criar um modelo 3D dela.
2. Gerar uma trajetória
Deve então gerar uma trajetória CNC. Isso pode ser feito em muitos pacotes CAM (Computer Aided Manufacturing). Você pode até gerar o modelo e a trajetória no mesmo software. No entanto, se o seu software CAD/CAM não tiver esse recurso, um programa CAM barato como CamBam, MeshCAM ou FreeMILL pode ser uma boa opção.
A equipe usou o software CamBam CNC, que é uma ferramenta econômica para projetar e construir modelos e trajetórias CNC.
Durante esta etapa, você precisará decidir a profundidade de cada camada e a estratégia de camadas. A equipe explicou que existem duas estratégias comuns para peças simples:
- Estratégia de camada Z — Essa estratégia simples envolve desenhar cada camada separadamente, recuando no início de cada camada.
- Estratégia espiral — Essa estratégia um pouco mais complexa envolve desenhar uma linha contínua que espirala do topo do formulário até o fundo. Isso produz uma peça mais suave e impõe forças menores ao robô.
3. Gerar código G
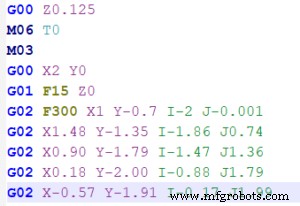
Depois de ter sua trajetória, o próximo passo é para convertê-lo em instruções que uma máquina CNC possa entender. A opção mais comum é o G-Code, mas você também pode usar APT-CLS ou NCI.
Com a conformação incremental tradicional baseada em CNC, esta seria a última etapa antes da produção. No entanto, como estamos usando robôs, há outro passo – muito importante.
4. Transforme o G-Code em comandos de robô
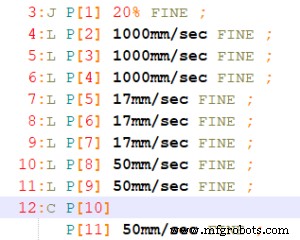
Para usar um robô para conformação incremental, você precisa converter o G-Code em comandos que o robô entenderá. No entanto, cada fabricante de robô tem sua própria linguagem de programação. Alguns fabricantes têm complementos de software CNC especializados, mas geralmente são muito caros e só funcionam com sua marca de robô.
Mario e sua equipe decidiram usar o RoboDK porque ele inclui uma Robot Machining Tool como padrão. É muito fácil de usar e é mais econômico do que outras opções no mercado. Você simplesmente carrega o arquivo G-Code no software e ele gera o caminho do robô automaticamente, evitando erros do robô.
5. Transfira o programa para o robô
A etapa final é transferir o programa para o robô e iniciar o processo de conformação incremental. Se todas as etapas anteriores foram bem, isso deve ser bastante simples. No entanto, há dois pontos que você deve ter em mente:
- Escolha um robô de alta rigidez — Os robôs têm uma rigidez menor do que as máquinas CNC. Isso pode fazer com que a ferramenta deflete quando forças muito altas são aplicadas, o que pode acontecer em tarefas de usinagem. A equipe usou um robô de carga pesada (com carga útil superior a 500 kg) para garantir que tivesse rigidez suficiente para a tarefa.
- Evite materiais desnecessariamente grossos — O material espesso será difícil de formar com o robô devido à sua baixa rigidez. Escolha apenas a espessura do material necessária para o seu produto e esteja preparado para usar material mais fino se começar a ver desvios da ferramenta.
Na primeira vez que você executar o programa, fique atento a quaisquer desvios da ferramenta que possam ser causados por forças excessivas aplicadas à ferramenta do robô.
Aqui está um vídeo do projeto da equipe:
Este trabalho foi realizado pelo Institut Maupertius com a colaboração de Halcyon performance.
Robô industrial
- As 3 etapas básicas da impressão 3D
- Sistemas de soldagem robótica:escolhendo o correto
- 3 Tendências no Manuseio de Material Robótico no Setor Industrial
- A Importância de Gerenciar o Fluxo de Trabalho de Soldagem Robótica
- As vantagens das pistolas de soldagem robóticas através do braço
- Soldagem Robótica vs Soldagem Manual:Melhorando a Qualidade e Eficiência
- 5 Aplicações Robóticas na Indústria Aeroespacial
- Sete etapas para garantir a qualidade em toda a cadeia de suprimentos
- Atualizando os documentos de qualidade
- Usinagem robótica:a próxima dimensão