


A tecnologia do tempo de voo promete maior precisão
A Analog Devices (ADI) e a Microsoft se uniram para produzir soluções de imagem 3D de tempo de voo (ToF) com o objetivo de fornecer maior precisão, independentemente das condições da cena. A ADI vai alavancar a tecnologia Azure Kinect 3D ToF da Microsoft e adicionar seu IC técnico e experiência de sistema para criar soluções que seriam mais fáceis de adotar. O objetivo é atingir um amplo público em setores como Indústria 4.0, automotivo, jogos, realidade aumentada e fotografia computacional e videografia.
Os analistas de mercado da indústria estimam um forte crescimento para sistemas de imagem 3D usados em ambientes desafiadores, e onde aplicativos de ponta, como robôs de colaboração humana, mapeamento de salas e sistemas de gerenciamento de estoque são necessários para dar vida à Indústria 4.0. Os aplicativos ToF também são necessários para criar ambientes de direção automotiva mais seguros com detecção de ocupação e recursos de monitoramento do motorista.
Em uma entrevista ao EE Times, Tony Zarola, diretor sênior de imagem aprimorada e interpretação e Carlos Calvo, gerente de marketing estratégico da Analog Devices, destacaram as bases desta colaboração . Zarola disse: “ A Microsoft se tornou a referência em desempenho de ToF 3D entre os fabricantes de sensores de imagem e está fornecendo à ADI a tecnologia de pixel principal que é a base dos sensores e soluções que a ADI está construindo. Ao longo de décadas, eles desenvolveram a experiência necessária para a melhor captura de dados e algoritmos revolucionários que executam no Intelligent Edge ou na Intelligent Cloud. Esperamos combinar o melhor dos recursos da Microsoft e da ADI em silício, sistemas, software e óptica. ”
Design 3D ToF
O reconhecimento de gestos é a capacidade de um dispositivo de identificar uma série de movimentos do corpo humano. A tecnologia eletrônica é baseada no auxílio de uma câmera e IC para a identificação e digitalização da cena em um perfil 2D ou 3D. A técnica do tempo de vôo consiste em enviar um feixe de laser ao alvo e analisar a reflexão do sinal.
Tempo de voo 3D, ou 3D ToF, é um tipo de LIDAR (detecção e alcance de luz) sem um scanner que usa pulsos ópticos de alta potência em nanossegundos para capturar informações de profundidade (normalmente em distâncias curtas) de uma cena. As várias soluções de IC, com o auxílio de algoritmos de software de reconhecimento de gestos, criam um mapa de profundidade das imagens recebidas, respondendo em tempo real aos movimentos do corpo. A principal vantagem da tecnologia de reconhecimento de gestos é que nenhum contato físico é necessário entre o indivíduo e o sistema de controle.
Uma câmera ToF mede a distância iluminando um objeto por meio de luz laser modulada e um sensor sensível ao comprimento de onda do laser para capturar a luz refletida. O sensor mede o intervalo de tempo entre o momento em que a luz é emitida e o momento em que a luz refletida é recebida pela câmera. Existem vários métodos para medir o retardo de tempo, dois dos quais se tornaram comuns:o método de onda contínua (CW) e o método de pulso. A grande maioria dos sensores ToF são CW e usam sensores CMOS.
Existem muitos fatores de confusão que tornam difícil a medição do tempo de vôo (ToF):luz ambiente interferente, efeitos de multicaminho causados pela luz refletida em objetos na cena corrompendo a distância real, efeitos de temperatura, ambigüidade de alcance. “Os desafios vão desde o desenvolvimento do silício até a criação de um sistema completo que atue em alinhamento com a soma teórica das peças”, disse Calvo. “É impossível olhar para cada componente isoladamente. Por exemplo, uma câmera ToF com o melhor sensor, mas equipada com uma lente não otimizada, terá um desempenho geral do sistema ruim. ”
“Na superfície, as câmeras ToF têm semelhanças com as câmeras RGB. Uma distinção importante é que, dependendo da aplicação, a qualidade da imagem da câmera RGB é avaliada com um grau de subjetividade; outros aplicativos são ativados apenas por meio de pós-processamento avançado. Uma câmera ToF mede uma quantidade física objetiva (distância) na qual um usuário, dependendo da aplicação, pode confiar significativamente na precisão da imagem. Algumas imperfeições ópticas em câmeras RGB, como reflexo de lente, podem produzir artefatos que às vezes são considerados artísticos (por exemplo, reflexo de luz solar). Em um sistema ToF, o alargamento da lente, se não for minimizado drasticamente, pode prejudicar o desempenho de todo o sistema na presença de fortes reflexos de objetos, acrescentou Calvo ”
O sensor CMOS usado para tempo de vôo consiste em um emissor e um receptor; ele permite cálculos para a distância de objetos em um nível de pixel único com um desempenho próximo a 160 fps.
“No nível do silício, deve-se considerar os elementos-chave da cadeia de sinal:o driver do laser, o sensor de imagem ToF com leitura integrada e, finalmente, o mecanismo de computação de profundidade. O desafio começa com o projeto de um pixel com alta responsividade e alto contraste de modulação no próprio sensor de imagem e termina com a formação de uma nuvem de pontos 3D que pode ser interpretada pela próxima camada do aplicativo.
“Além dos componentes, os principais desafios decorrem do projeto e produção de uma câmera de profundidade, já que o projeto opto-mecânico, a calibração, o projeto elétrico e a implementação de software são demorados e desafiadores. A Analog Devices (ADI) assume esses desafios para que nossos clientes facilitem o processo de design ”, disse Calvo.
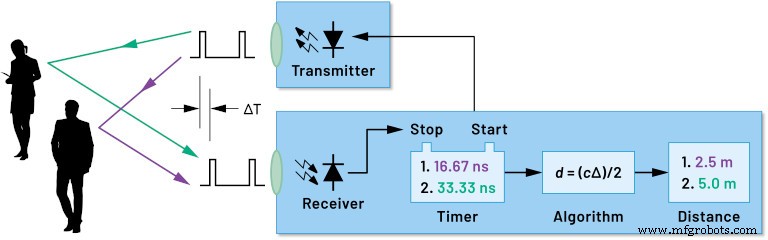
Figura 1. Diagrama de blocos ToF. (fonte:ADI)
Os pixels coletam luz de partes distintas da cena e sua recombinação constituirá a imagem reconstruída. Todos os pixels do sensor são controlados por uma correlação entre blocos de demodulação e modulação. Cada pixel pode ser aproximado pelo modelo mostrado na Figura 2.
A corrente é direcionada para o Nó-A (Da) ou Nó-B (Db) durante o tempo de integração, ativando os sinais de controle relevantes. A leitura ocorre com a demodulação parada, para que o sistema possa ler toda a seqüência de bits. ClkA e ClkB são modulados 180 graus fora de fase para o tempo tInt1 na frequência de modulação selecionada. A fase da luz recebida em relação ao relógio ClkA e CLkB determina os sinais DA e DB. Ao final da integração, ClkA e ClkB são desligados e a fase de leitura ocorre por amostragem do sinal integrado (BitlineAInt1-BitlineBInt1).
A conversão de fótons em corrente elétrica é governada por um processo quântico com distribuição de Poisson. O parâmetro que nos dá uma ideia da bondade do sistema é a eficiência quântica, que é a razão entre o número de elétrons produzidos e o de fótons que ativam os pixels correspondentes. O número de elétrons depende tanto da luz modulada real quanto da luz ambiente que corresponde ao efeito do ruído. Um parâmetro a ser escolhido ao projetar um sistema Time-of-Flight é FoV (Field of View). O FoV deve ser escolhido apropriadamente de acordo com os requisitos de cobertura da cena.
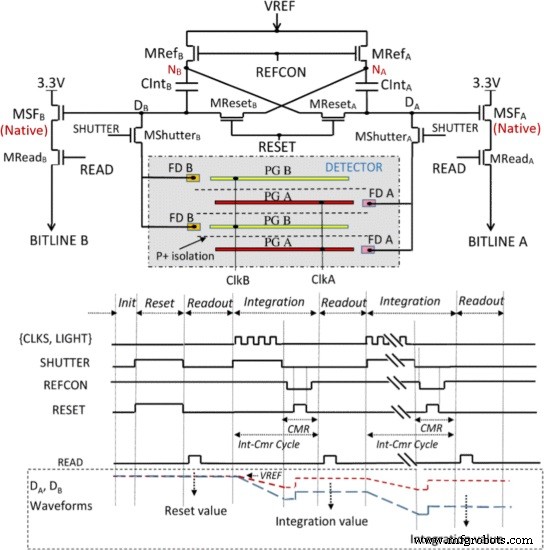
Figura 2. Circuito elétrico e tempo para um pixel. (Fonte:https://ieeexplore.ieee.org/document/6964815)
A fim de alcançar alta eficiência em altas frequências, o chip pode ser fabricado usando um processo CMOS de baixa potência de sinal misto de 0,13 μm com pequenas modificações para suportar uma operação eficiente de tempo de voo.
ADI e Microsoft
A colaboração entre a Microsoft e a ADI visa aprimorar a tecnologia ToF:a ADI está projetando uma nova série de sensores de imagem ToF 3D que fornecerá menos de um milímetro de precisão e será compatível com o ecossistema gigante de Redmond, com base na profundidade da Microsoft, Intelligent Cloud e plataformas Intelligent Edge.
“Acreditamos fortemente que esta colaboração impactará todas as principais indústrias - consumidor, industrial, saúde e automotiva. Até agora, a tecnologia desenvolvida pela Microsoft não estava amplamente disponível para aplicativos comerciais em escala. Acreditamos que as soluções ADI, movidas pela tecnologia de imagem da Microsoft, serão uma virada de jogo em todas as áreas ”, disse Zarola.
Existem aplicações óbvias de sistemas de segurança para reconhecimento facial aprimorado, juntamente com medidas de segurança avançadas para automação de fábrica mais eficiente. A Indústria 4.0 será transformada com robôs colaborativos trabalhando com segurança ao lado de humanos, sem serem cercados em uma área "não humana" e a otimização da logística será habilitada pela precisão do ToF para dimensionamento de caixas e paletes.
Zarola acrescentou:“A detecção de ocupação mais sofisticada levará a uma maior eficiência energética, sistemas de segurança e interações homem-máquina. Da casa ao carro, nossa colaboração ToF com a Microsoft dará a novas experiências de jogos a capacidade de colocar e interagir com objetos virtuais no mundo real e mudar a forma como interagimos com nossos carros e aumentar a segurança monitorando o motorista e os passageiros. Os casos de uso em potencial para a tecnologia ToF são amplos e estão em evolução, portanto, espera-se que as principais aplicações de hoje sejam substituídas por novas ideias amanhã. ”
Zarola e Calvo declararam como seus clientes desejam resolução em milímetros de profundidade e resolução espacial precisa em uma ampla faixa de temperaturas. Alcançar este tipo de desempenho requer um nível extremo de sincronização de tempo alcançado tanto no nível de hardware quanto de software. “Um desalinhamento de tempo de 10ps entre os sinais que controlam o laser e os pixels no sensor resulta em um erro de 1,5 mm na estimativa de distância final. Se isso não fosse difícil o suficiente, acrescente a isso a necessidade de manter um sistema de tempo de voo preciso em uma ampla faixa de temperaturas que requer processamento avançado e algoritmos de calibração que precisam ser projetados em conjunto ”, disse Calvo.
Uma crítica específica aos sistemas ToF é a frequência de modulação em que eles podem operar e onde o ADI está mais concentrado. A maioria das fontes de erros de estimativa de profundidade tende a ser “dividida” pela frequência de modulação. “Nosso objetivo é aumentar a frequência de modulação média de um sistema ToF que permitirá fazer medições com menor ruído de profundidade, bem como reduzir os efeitos adversos do multipath ou ruído de disparo de luz ambiente”, disse Zarola.
Zarola acrescentou:“A ADI também está procurando resolver os principais desafios que tornam o projeto e a produção de câmeras de profundidade demorados e difíceis. Estamos assumindo o alinhamento mecânico, design óptico, calibração, design elétrico e implementação de software, juntamente com os obstáculos tradicionais na captura de imagem. ”
A combinação da tecnologia 3D Time-of-Flight (ToF) da Microsoft usada nos dispositivos de realidade mista HoloLens e o kit de desenvolvimento Azure Kinect, com as soluções personalizadas da ADI, permitirá que a nova geração de aplicativos de alto desempenho sejam implementados e escalonáveis, ao mesmo tempo otimizando o tempo de colocação no mercado.
>> Este artigo foi publicado originalmente em nosso site irmão, EE Times.
Integrado
- ams para facilitar a implementação da tecnologia de detecção óptica 3D
- A plataforma GNSS aumenta a precisão posicional
- As tecnologias aprimoradas irão acelerar a aceitação de assistentes de voz
- Sensores fotoelétricos estendem a distância de detecção de tempo de voo
- Sensores de imagem automotivos oferecem faixa dinâmica aprimorada
- O sensor de imagem 3D Tiny usa tecnologia de tempo de voo
- O sensor de pressão barométrica oferece maior precisão
- DUAGON-MEN-GROUP integra OEM Technology Solutions Austrália
- Como a tecnologia promete transformar fazendas e indústrias alimentícias
- Tecnologia de movimento linear