


Condução de motores em sistemas IoT alimentados por bateria
Aprenda técnicas de design de drivers de motor para ajudar a estender a vida útil da bateria em sistemas de motor alimentados por bateria.
Muitos sistemas alimentados por bateria e aplicativos de Internet das Coisas (IoT) - como medidores inteligentes, produtos de saneamento inteligentes, campainhas de vídeo, brinquedos robóticos, produtos de higiene pessoal e fechaduras eletrônicas - contêm um motor, solenóide ou relé. A interação entre a bateria e a física do motor produz alguns desafios de design interessantes, como operar o sistema de forma confiável conforme a tensão da bateria muda, minimizando a energia em espera para aumentar a vida útil do sistema e fornecendo grandes correntes ao motor durante a inicialização e o travamento.
Neste artigo, vou oferecer algumas dicas para ajudar a superar esses desafios de design.
Visão geral de sistemas de motores alimentados por bateria
A faixa de tensão da bateria disponível para o driver do motor depende da química da bateria, profundidade de descarga, temperatura, corrente de carga e o número de células da bateria conectadas em série ou em paralelo. Embora a modelagem de bateria seja uma ciência complexa, vamos começar com um modelo de bateria simples usando a tensão de circuito aberto (V OCV ), resistência interna da bateria (R BAT ) e tensão do terminal da bateria (V BAT ), conforme mostrado na Figura 1 .
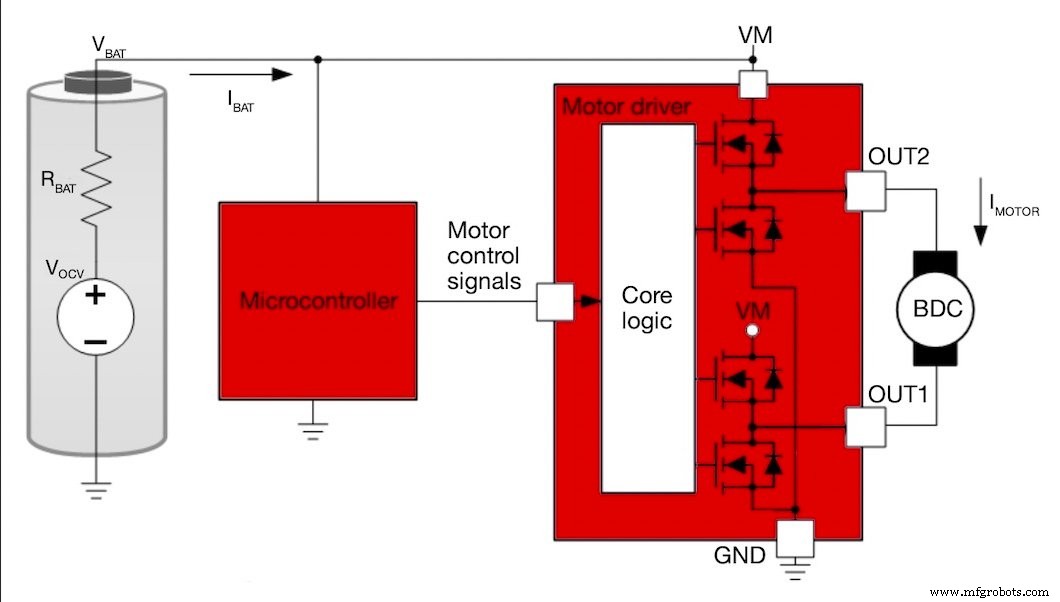
Figura 1. Diagrama de blocos de um sistema alimentado por bateria com um driver de motor e motor.
Tabela 1 mostra alguns exemplos de faixas de tensão de bateria para vários produtos químicos de bateria.
| Química da bateria e empilhamento | V BAT de bateria totalmente carregada | V BAT de bateria esgotada | R BAT | Capacidade |
| 2 AA (alcalino), Duracell OP1500 | 1,7 V / célula 3,4 V no total | 0,8 V / célula 1,6 V no total | 100-250 mΩ / célula 200-500 mΩ no total | 2.400 mAh * |
| 3 AAA (alcalino), Panasonic LR03AD | 1,55 V / célula 4,65 V no total | 0,8 V / célula 2,4 V no total | 135 mΩ / célula (média) 405 mΩ no total (média) | 2.640 mAh |
| 4 AA (alcalino), Energizer E91 | 1,5 V / célula 6 V / célula | 0,8 V / célula 3,2 V no total | 150-300 mΩ / célula (fresco) 600-1200 mΩ no total (fresco) | 2.500 mAh * |
| 1 íon-lítio, Panasonic NCR18650BF | 4,2 V | 2,5 V | 77 mΩ * | 3.200 mAh |
| 2 polímero de lítio, Farnell SR674361P | 4,2 V / célula 8,4 V no total | 2,75 V / célula 5,5 V no total | 160 mΩ / célula 320 mΩ no total | 2.000 mAh |
* Parâmetros calculados a partir de outros parâmetros da planilha de dados da bateria
Tabela 1. Parâmetros aproximados de bateria para várias químicas e empilhamento de bateria.
R BAT e V OCV são contribuidores importantes para V BAT mudando ao longo da vida da bateria. Conforme a carga da bateria se esgota, V OCV diminui, e R BAT aumenta. À medida que a carga retira corrente da bateria (I BAT ), V BAT diminui devido à queda de tensão em R BAT .
Figura 2 mostra a relação entre V OCV , R BAT e eu BAT em toda a vida útil da bateria.
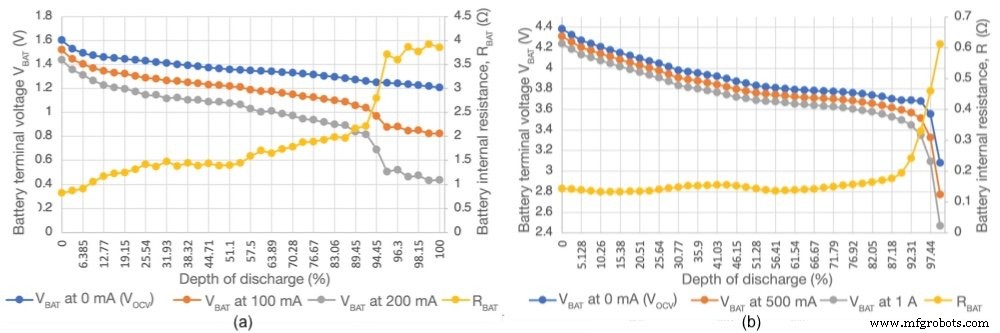
Figura 2. Gráficos de VBAT e RBAT para alcalino (a) e íon-lítio (b) baterias para várias correntes de carga de bateria (IBAT) com base em dados do banco de dados de identificação química da TI.
A profundidade de descarga (DoD) representa a vida útil da bateria como uma porcentagem em relação à capacidade total de carga da bateria fornecida em miliamperes-hora (mAh). Um DoD 100% representa uma bateria totalmente descarregada.
Projetando para um Wide V BAT Alcance
Porque V BAT mudanças com DoD e I BAT , a classificação do trilho de alimentação para um driver de motor deve acomodar uma gama de tensões de bateria possíveis. Por exemplo, muitos drivers de motor projetados para sistemas de 24 V têm um trilho de alimentação mínimo de 4,5 V. Com quatro baterias alcalinas conectadas em série, um driver de motor com uma classificação de alimentação mínima de 4,5 V pode se desativar usando o bloqueio de subtensão antes das baterias totalmente ralo.
O DRV8210 e o DRV8212 da Texas Instruments (TI) são exemplos de drivers de motor projetados para aplicações alimentadas por bateria com uma classificação de alimentação de 1,65 V a 11 V. Isso acomoda a tensão máxima para uma pilha de bateria de lítio de duas células (8,4 V) ou uma pilha de bateria alcalina de duas células quase descarregada (1,65 V).
Projetando para modo de espera de baixo consumo de energia
Os sistemas alimentados por bateria passam a maior parte de sua vida operacional em estado de espera. Por exemplo, os consumidores podem operar persianas motorizadas apenas duas vezes por dia ou travar e destravar uma fechadura eletrônica até 20 vezes por dia. A válvula de um medidor de gás ou água só pode atuar uma vez por ano. A corrente de espera de todo o sistema deve ser baixa para atingir longa vida útil da bateria nesses sistemas.
Adicionar interruptores de carga nos trilhos de alimentação de dispositivos periféricos no sistema é uma maneira de manter baixa a corrente de espera. Outra forma é usar dispositivos com baixas correntes de espera otimizados para aplicações de bateria. O DRV8210 e o DRV8212 têm correntes de repouso <84,5 nA para ajudar a reduzir o consumo de corrente em standby do sistema. Outras maneiras de reduzir a corrente de espera do sistema são eliminar os divisores do resistor e definir os pinos lógicos do dispositivo com resistores suspensos em 0 V quando não estiver operando.
Gerenciando grandes correntes para reduzir o consumo de energia e aumentar a vida útil
Grandes correntes de motores criam dois problemas nos sistemas de bateria:eles usam energia de forma improdutiva e podem fazer com que o sistema entre prematuramente em uma condição de bloqueio de bateria fraca devido à queda de tensão em R BAT . Existem duas causas principais para grandes correntes de motor:corrente de inrush durante a partida do motor e corrente de travamento. Figura 3 mostra um exemplo dessas correntes.
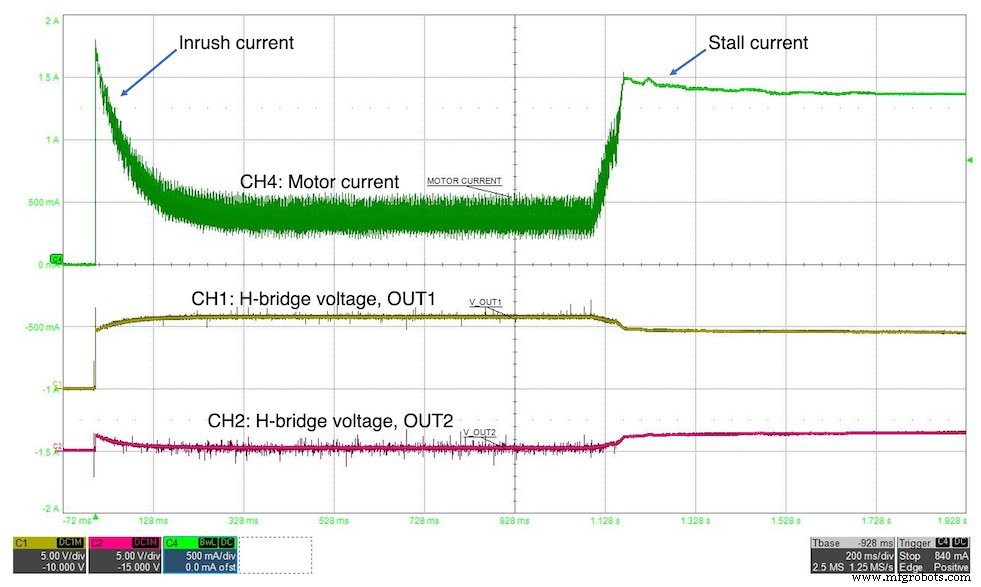
Figura 3. Correntes de inrush e stall.
Implementar uma rotina de partida suave para o motor aumentando o ciclo de trabalho de modulação por largura de pulso pode mitigar a grande corrente de pico durante a partida do motor. Figura 4 mostra exemplos de implementações de hard start e soft start para uma pilha esgotada de quatro baterias AAA.
Na Figura 4 (a) , a corrente de partida do motor faz com que a tensão da bateria caia durante uma partida difícil por causa da queda de tensão em R BAT . Se este sistema for reiniciado ou entrar em um estado de travamento de subtensão em torno de 3,5 V, o motor não será capaz de operar além da partida inicial.
Figura 4 (b) mostra como o uso de uma partida suave causa uma queda de tensão menor no barramento de alimentação, o que pode ajudar a alcançar um pouco mais de vida útil operacional de um sistema com uma bateria descarregada.
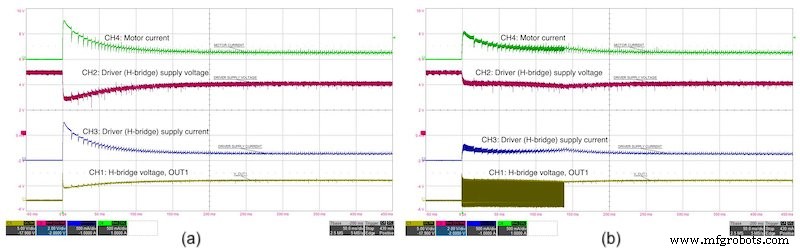
Figura 4. Difícil- (a) e soft-start (b) corrente de irrupção em quatro baterias AAA esgotadas em série usando o DRV8210. A rotina de partida suave mostrada aqui aumenta o ciclo de trabalho de 0% para 100% durante a partida do motor.
Para ajudar a controlar as correntes de bloqueio, adicionar um resistor de detecção de corrente pode ajudar o microcontrolador a detectar um bloqueio e desabilitar o driver do motor antes de extrair grandes correntes de bloqueio por um longo período de tempo. As condições de perda podem ocorrer devido a um bloqueio mecânico não intencional ou a carga mecânica atingindo uma parada final (como uma fechadura totalmente acionada em uma trava inteligente).
Figura 5 mostra uma implementação de sistema de exemplo usando o DRV8212.
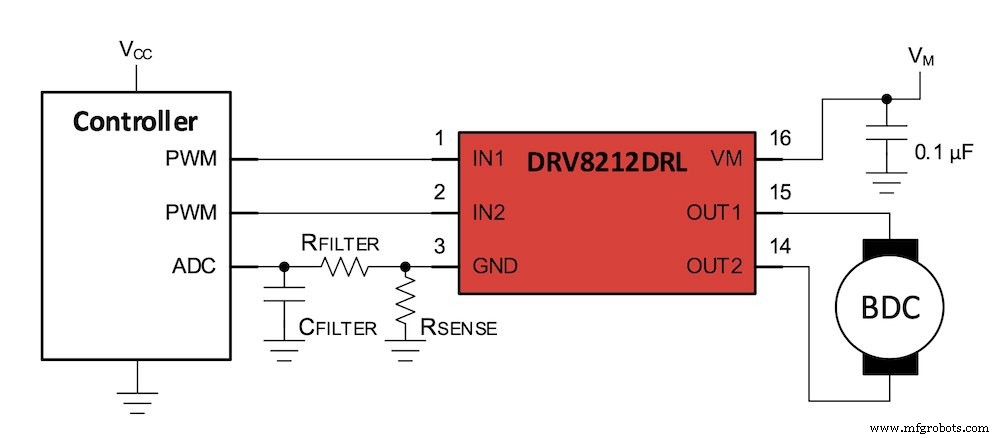
Figura 5. Diagrama de blocos de exemplo de uma implementação de detecção de paralisação com o DRV8212.
O conversor analógico-digital do microcontrolador mede a tensão do resistor de detecção e compara essa tensão com um limite armazenado no firmware. Se a medição da corrente exceder o limite por um determinado período de tempo, o microcontrolador desativa o driver do motor para economizar energia. É importante configurar a duração de tempo para detectar um estol para que a corrente de pico não acione acidentalmente a detecção de estol.
Figura 6 mostra um perfil de corrente do motor durante uma condição de estol com a detecção de estol implementada, enquanto a Figura 3 mostra a forma de onda da corrente do motor sem detecção de estol.
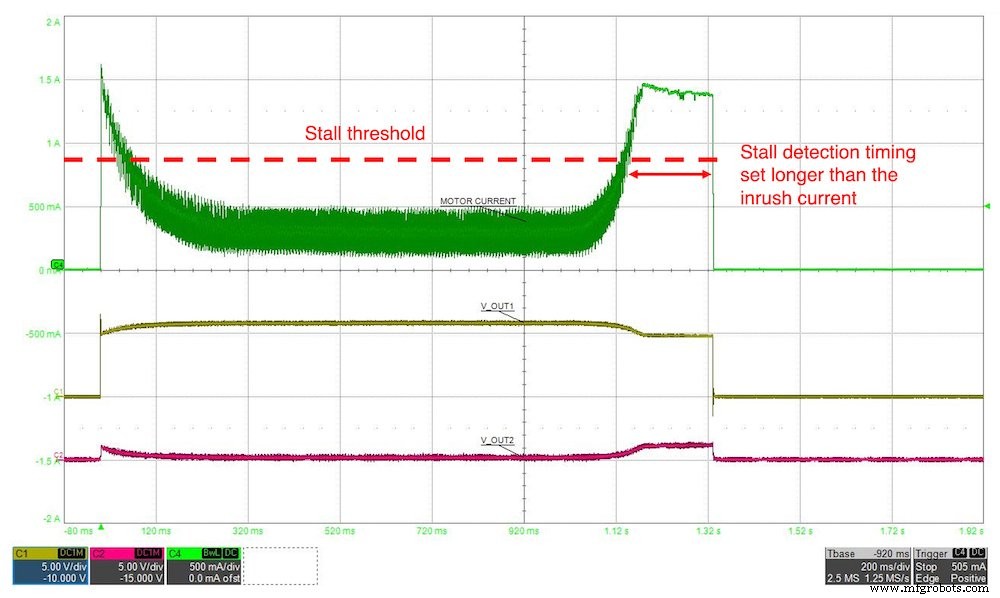
Figura 6. Perfis de corrente do motor com detecção de estol.
Os fabricantes de baterias medem a capacidade da bateria em mAh, portanto, limitar a magnitude da corrente de inrush e a duração da corrente de estolagem ajuda a prolongar a vida útil da bateria.
Conclusão
Pode ser desafiador projetar sistemas alimentados por bateria que usam motores devido à vida operacional finita da bateria, variação da tensão da bateria e grandes correntes do motor. Usar um driver de motor classificado para a faixa de tensão da bateria facilita os esforços de design, eliminando conversores de reforço adicionais e acomodando a tensão mínima de operação da bateria.
Minimizar a corrente geral de espera do sistema e usar um driver de motor com um modo de espera de baixo consumo de energia reduz o consumo de energia desperdiçado da bateria. As técnicas de partida suave e de detecção de estol também podem ajudar a aumentar a vida útil de aplicações de bateria, reduzindo a magnitude e a duração de grandes correntes de motor no sistema.
Ao usar essas técnicas, os projetistas de sistemas podem prolongar a vida útil em sistemas alimentados por bateria, como produtos de saneamento inteligentes, persianas motorizadas, fechaduras eletrônicas inteligentes e outros.
Artigos do setor são uma forma de conteúdo que permite aos parceiros do setor compartilhar notícias, mensagens e tecnologia úteis com os leitores do All About Circuits de uma forma que o conteúdo editorial não é adequado. Todos os artigos da indústria estão sujeitos a diretrizes editoriais rígidas com a intenção de oferecer aos leitores notícias úteis, conhecimentos técnicos ou histórias. Os pontos de vista e opiniões expressos nos Artigos da Indústria são do parceiro e não necessariamente da All About Circuits ou de seus redatores.
Tecnologia da Internet das Coisas
- Examinando IoT celular:custo, bateria e dados
- Fabricação inteligente e a IoT está conduzindo a próxima revolução industrial
- A tecnologia LoRa está impulsionando a adoção da IoT, mudando vidas
- Uma liderança forte está impulsionando a adoção da IoT
- Seis etapas para proteger sistemas embarcados na IoT
- Onde o antigo encontra a IoT, integração SaaS
- O que é segurança de IoT?
- Parceria visa a vida útil infinita da bateria do dispositivo IoT
- A IoT industrial não é a panaceia que nos prometeram… ainda
- Aplicações de Sistemas de Monitoramento da Qualidade do Ar Infundido de IoT Industrial