


Registradores de deslocamento:Conversão de entrada serial, saída paralela (SIPO)
Um registrador de deslocamento de entrada serial e saída paralela é semelhante ao registrador de deslocamento de entrada serial, pois ele transfere os dados para os elementos de armazenamento interno e transfere os dados para o pino de saída e saída de dados.
A diferença é que disponibiliza todos os estágios internos como saídas. Portanto, um registro de deslocamento de entrada serial e saída paralela converte os dados do formato serial para o formato paralelo.
Um exemplo de uso de registro de deslocamento de entrada serial e saída paralela
Se quatro bits de dados são deslocados por quatro pulsos de clock através de um único fio na entrada de dados, abaixo, os dados se tornam disponíveis simultaneamente nas quatro saídas Q A para Q D após o quarto pulso do relógio.
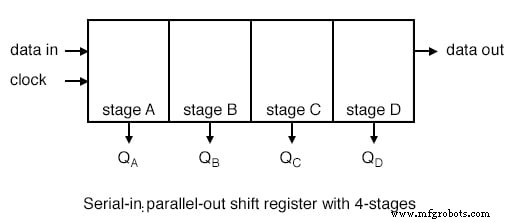
A aplicação prática do registro de deslocamento de entrada serial e saída paralela é converter dados do formato serial em um único fio para o formato paralelo em vários fios.
Vamos iluminar quatro LEDs (diodos emissores de luz) com as quatro saídas ( Q A Q B Q C Q D )
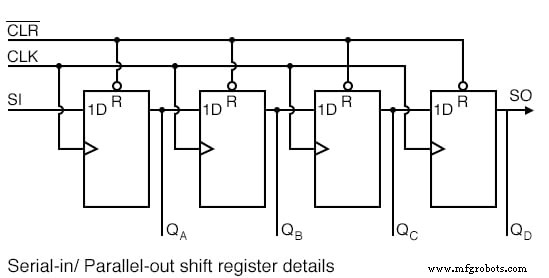
Os detalhes acima do registro de deslocamento de entrada serial e saída paralela são bastante simples. Ele se parece com um registro de deslocamento de entrada e saída serial com torneiras adicionadas a cada saída de estágio.
Dados seriais mudam em SI (Entrada serial). Depois de um número de relógios igual ao número de estágios, o primeiro bit de dados aparece em SO (Q D ) na figura acima.
Em geral, não há pino SO. A última etapa (Q D acima) serve como SO e é enviado em cascata para o próximo pacote, se existir.
Entrada serial, saída paralela vs. entrada serial, registro de deslocamento de saída serial
Se um registrador de deslocamento de entrada serial e saída paralela é tão semelhante a um registrador de deslocamento de entrada serial e saída serial, por que os fabricantes se preocupam em oferecer os dois tipos?
Por que não apenas oferecer o registrador de deslocamento de entrada serial e saída paralela?
A resposta é que, na verdade, eles oferecem apenas o registro de deslocamento de entrada serial e saída paralela, contanto que não tenha mais do que 8 bits.
Observe que os registradores de deslocamento de entrada e saída serial vêm em comprimentos maiores do que 8 bits de 18 a 64 bits.
Não é prático oferecer um registro de deslocamento de entrada serial e saída paralela de 64 bits que requer tantos pinos de saída. Veja as formas de onda abaixo para o registro de deslocamento acima.
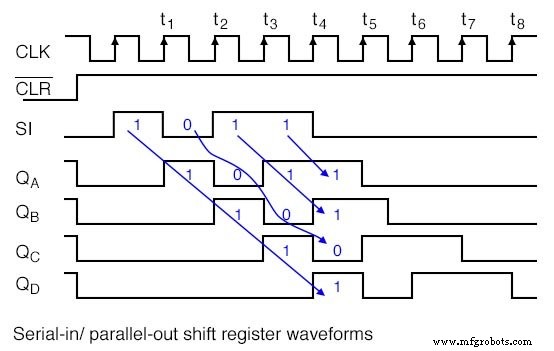
O registro de deslocamento foi limpo antes de quaisquer dados por CLR ’ , um sinal baixo ativo, que limpa todos os flip-flops tipo D dentro do registro de deslocamento.
Observe os dados seriais 1011 padrão apresentado no SI entrada. Esses dados são sincronizados com o relógio CLK .
Este seria o caso se ele estivesse sendo deslocado de algo como outro registrador de deslocamento, por exemplo, um registrador de deslocamento de entrada paralela e de saída serial (não mostrado aqui).
No primeiro relógio em t1 , os dados 1 em SI é deslocado de D para Q do primeiro estágio de registro de deslocamento. Depois de t2 este primeiro bit de dados está em Q B .
Depois de t3 está em Q C . Depois de t4 está em Q D . Quatro pulsos de clock mudaram o primeiro bit de dados até o último estágio Q D .
O segundo bit de dados é 0 está em Q C após o 4º relógio. O terceiro bit de dados é 1 está em Q B . O quarto bit de dados outro 1 está em Q A .
Assim, o padrão de entrada de dados seriais 1011 está contido em ( Q D Q C Q B Q A ) Agora está disponível nas quatro saídas.
Ele estará disponível nas quatro saídas logo após o relógio t 4 até um pouco antes de t 5 .
Esses dados paralelos devem ser usados ou armazenados entre essas duas vezes, ou serão perdidos devido ao deslocamento do Q D estágio nos relógios seguintes t 5 para t 8 como mostrado acima.
Dispositivos de entrada serial e saída paralela
Vamos dar uma olhada mais de perto nos registradores de deslocamento de entrada serial e saída paralela disponíveis como circuitos integrados, cortesia da Texas Instruments.
Para folhas de dados completas do dispositivo, siga os links.
- SN74ALS164A registro de deslocamento de 8 bits com entrada serial / saída paralela
- SN74AHC594 entrada serial / saída paralela registrador de deslocamento de 8 bits com registro de saída
- SN74AHC595 entrada serial / saída paralela registrador de deslocamento de 8 bits com registro de saída
- CD4094 serial de entrada / saída paralela registrador de deslocamento de 8 bits com registro de saída
O 74ALS164A é quase idêntico ao nosso diagrama anterior, com exceção das duas entradas seriais A e B .
A entrada não utilizada deve ser elevada para habilitar a outra entrada. Não mostramos todas as etapas acima.
No entanto, todas as saídas são mostradas no símbolo ANSI abaixo, junto com os números dos pinos.
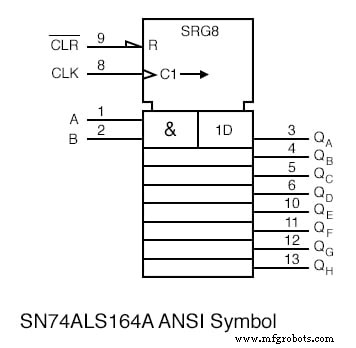
O CLK entrada para a seção de controle do símbolo ANSI acima tem duas funções internas C1 , controle de qualquer coisa com um prefixo de 1 .
Isso seria registrar dados em 1D . A segunda função, a seta após a barra (/), é o deslocamento para a direita (para baixo) dos dados dentro do registrador de deslocamento.
As oito saídas estão disponíveis à direita dos oito registros abaixo da seção de controle. O primeiro estágio é mais amplo do que os outros para acomodar o A&B entrada.
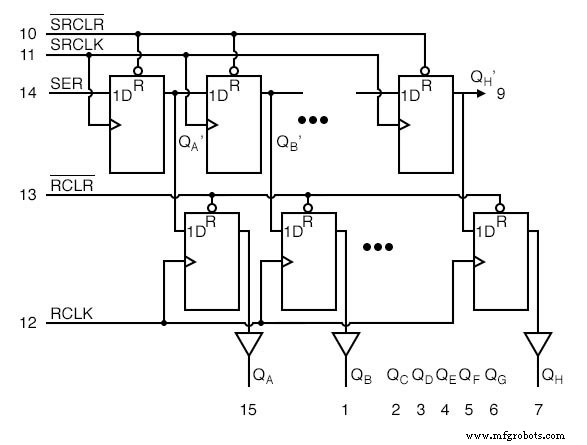
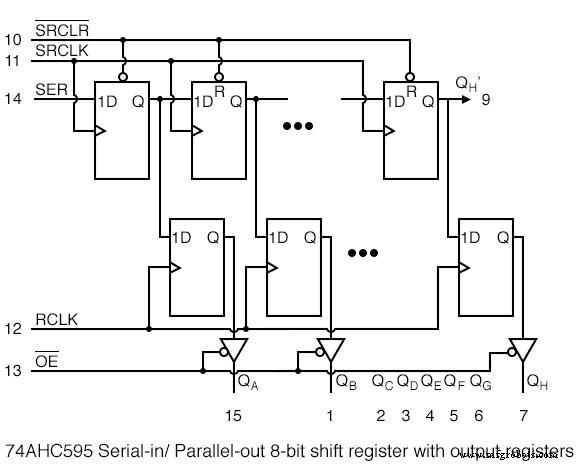
O diagrama lógico interno acima é adaptado da planilha de dados TI (Texas Instruments) para o 74AHC594. Os FFs tipo “D” na linha superior compreendem um registro de deslocamento de entrada serial e saída paralela.
Esta seção funciona como os dispositivos descritos anteriormente. As saídas ( Q A ’Q B ’ para Q H ’ ) da metade do registrador de deslocamento do dispositivo alimenta os FFs tipo “D” na metade inferior em paralelo. Q H ’ (pino 9) é deslocado para qualquer pacote de dispositivo em cascata opcional.
Uma única transição positiva do clock em RCLK irá transferir os dados de D para Q dos FFs inferiores. Todos os 8 bits são transferidos em paralelo ao registro de saída (uma coleção de elementos de armazenamento).
O objetivo do registro de saída é manter uma saída de dados constante enquanto novos dados são transferidos para a seção superior do registrador de deslocamento.
Isso é necessário se as saídas acionam relés, válvulas, motores, solenóides, buzinas ou campainhas. Este recurso pode não ser necessário ao acionar LEDs, desde que a cintilação durante a mudança não seja um problema.
Observe que o 74AHC594 tem relógios separados para o registrador de deslocamento ( SRCLK ) e o registro de saída ( RCLK ) Além disso, o shifter pode ser liberado por SRCLR e, o registro de saída por RCLR .
É desejável colocar as saídas em um estado conhecido na inicialização, em particular, se estiver acionando relés, motores, etc. As formas de onda abaixo ilustram o deslocamento e o travamento de dados.
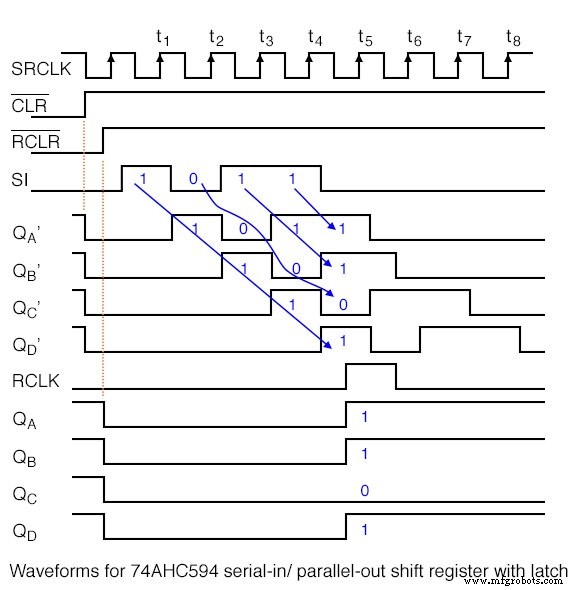
As formas de onda acima mostram o deslocamento de 4 bits de dados para os primeiros quatro estágios de 74AHC594 e, em seguida, a transferência paralela para o registro de saída.
Na verdade, o 74AHC594 é um registrador de deslocamento de 8 bits e levaria 8 relógios para alternar em 8 bits de dados, o que seria o modo normal de operação.
No entanto, os 4 bits que mostramos economizam espaço e ilustram adequadamente a operação.
Limpamos o registrador de deslocamento meio relógio antes de t 0 com SRCLR ’=0 . SRCLR ’ deve ser liberado para trás bem alto antes de mudar.
Imediatamente antes de t 0 o registro de saída é limpo por RCLR ’=0 . Ele também é lançado ( RCLR ’=1 )
Dados seriais 1011 é apresentado no pino SI entre os relógios t 0 e t 4 . É alterado por relógios t 1 t 2 t 3 t 4 aparecendo em estágios de mudança internos Q A ’Q B ’Q C ’Q D ’ .
Esses dados estão presentes nestes estágios entre t 4 e t 5 . Após t 5 os dados desejados ( 1011 ) estarão indisponíveis nesses estágios de deslocamento internos.
Entre t 4 e t 5 aplicamos uma atitude positiva RCLK transferindo dados 1011 para registrar saídas Q A Q B Q C Q D .
Esses dados serão congelados aqui como mais dados ( 0 s) muda durante o SRCLK seguinte s ( t 5 para t 8 ) Não haverá uma mudança nos dados aqui até outro RCLK é aplicado.
O 74AHC595 é idêntico ao ‘594, exceto que o RCLR’ é substituído por um OE ’ habilitando um buffer tri-state na saída de cada um dos oito bits de registro de saída.
Embora o registro de saída não possa ser apagado, as saídas podem ser desconectadas por OE '=1 .
Isso permitiria que resistores externos pull-up ou pull-down forçassem qualquer relé, solenóide ou acionadores de válvula a um estado conhecido durante a inicialização do sistema.
Uma vez que o sistema é ligado e, digamos, um microprocessador mudou e travou os dados no '595, a habilitação de saída pode ser afirmada ( OE' =0 ) para acionar os relés, solenóides e válvulas com dados válidos, mas não antes disso.
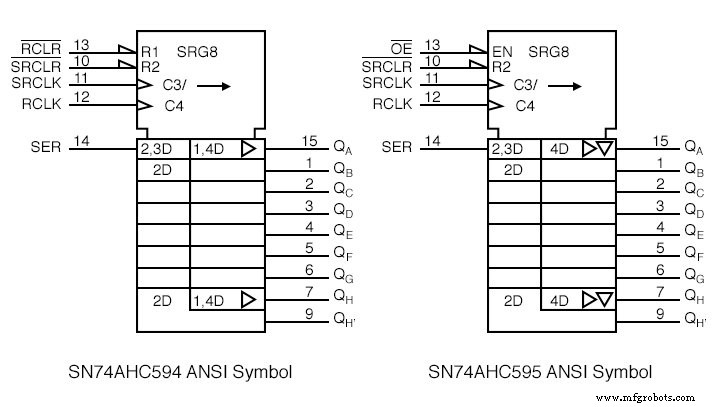
Acima estão os símbolos ANSI propostos para esses dispositivos. C3 relógios dados na entrada serial (externo SER ) conforme indicado pelo 3 prefixo de 2,3D .
A seta depois de C3 / indica o deslocamento para a direita (para baixo) do registro de deslocamento, os 8 estágios à esquerda do símbolo '595 abaixo da seção de controle.
O 2 prefixo de 2,3D e 2D indica que esses estágios podem ser redefinidos por R2 ( SRCLR ’ externo )
O 1 prefixo de 1,4D no '594 indica que R1 ( RCLR ’ externo ) pode redefinir o registro de saída, que está à direita da seção de registro de deslocamento.
O ‘595 , que tem um EN em OE ’ externo não pode redefinir o registro de saída. Mas, o EN habilita buffers de saída tristate (triângulo invertido).
O triângulo que aponta direito de ambos os '594 e ‘595 indica buffer interno. Ambos os '594 e ‘595 registros de saída são cronometrados por C4 conforme indicado por 4 de 1,4D e 4D respectivamente.
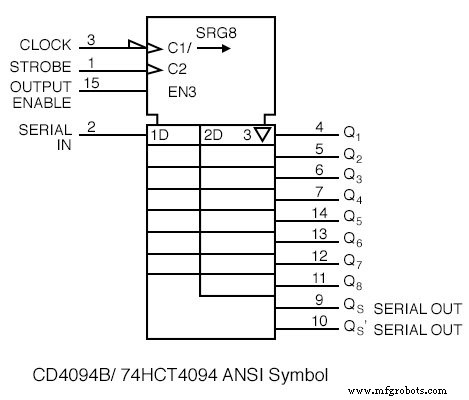
O CD4094B é um DC de 3 a 15 V capaz de travar a alternativa de registro de deslocamento aos dispositivos 74AHC594 anteriores.
RELÓGIO , C 1, muda os dados em SERIAL IN conforme implícito em 1 prefixo de 1D .
É também o relógio do registrador de deslocamento para a direita (metade esquerda do corpo do símbolo), conforme indicado pela / (seta para a direita) de C1 / (seta) no CLOCK entrada.
STROBE , C2 é o relógio para o registrador de saída de 8 bits à direita do corpo do símbolo. O 2 de 2D indica que C2 é o relógio para o registro de saída.
O triângulo invertido na trava de saída indica que a saída está triestada, sendo habilitada por EN3 .
O 3 precedendo o triângulo invertido e o 3 de EN3 são frequentemente omitidos, pois qualquer ativação ( EN ) é entendido para controlar as saídas tristate. Q S e Q S ’ são saídas não travadas do estágio de registro de deslocamento.
Q S pode ser enviado em cascata para SERIAL IN de um dispositivo posterior.
Aplicações práticas
Uma aplicação do mundo real do registro de deslocamento de entrada serial e saída paralela é a saída de dados de um microprocessador para um indicador de painel remoto.
Ou outro dispositivo de saída remoto que aceita dados em formato serial.
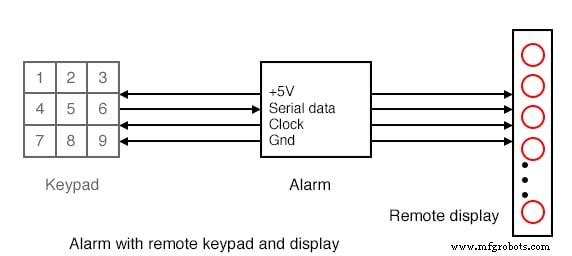
A figura “Alarme com teclado remoto” é repetida aqui a partir da seção de entrada paralela e saída serial com a adição do display remoto.
Assim, podemos exibir, por exemplo, o estado dos loops de alarme conectados à caixa de alarme principal.
Se o Alarme detectar uma janela aberta, ele pode enviar dados seriais para o display remoto para nos informar.
Tanto o teclado quanto a tela provavelmente estariam contidos no mesmo invólucro remoto, separados da caixa de alarme principal. No entanto, veremos apenas o painel de exibição nesta seção.
Se o visor estivesse na mesma placa do alarme, poderíamos apenas passar oito fios para os oito LEDs junto com dois fios de alimentação e aterramento.
Esses oito fios são muito menos desejáveis em um longo percurso para um painel remoto. Usando registradores de deslocamento, precisamos apenas executar cinco fios - relógio, dados seriais, um estroboscópio, energia e aterramento.
Se o painel estivesse a apenas alguns centímetros de distância da placa principal, ainda seria desejável reduzir o número de fios em um cabo de conexão para aumentar a confiabilidade.
Além disso, às vezes usamos a maioria dos pinos disponíveis em um microprocessador e precisamos usar técnicas seriais para expandir o número de saídas.
Alguns dispositivos de saída de circuito integrado, como conversores digital para analógico, contêm registros de deslocamento de entrada serial e saída paralela para receber dados de microprocessadores.
As técnicas ilustradas aqui são aplicáveis a essas peças.
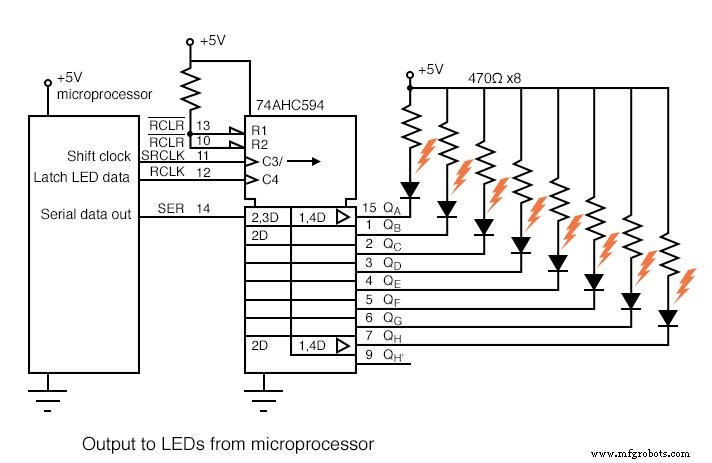
Escolhemos o registro de deslocamento de entrada serial e saída paralela 74AHC594 com registro de saída; porém, requer um pino extra, RCLK , para carregar em paralelo os dados deslocados para os pinos de saída.
Este pino extra evita que as saídas mudem enquanto os dados estão mudando. Isso não é um grande problema para os LEDs. Mas, seria um problema se acionasse relés, válvulas, motores, etc.
O código executado no microprocessador começaria com 8 bits de dados a serem produzidos. Um bit seria emitido no pino “Saída de dados serial”, conduzindo SER do 74AHC594 remoto.
Em seguida, o microprocessador gera uma transição de baixo para alto no “relógio de turno”, conduzindo SRCLK do registrador de deslocamento '595.
Este relógio positivo muda o bit de dados em SER de “D” a “Q” do primeiro estágio de registro de deslocamento.
Isso não tem efeito sobre o Q A LED neste momento por causa do registro de saída interno de 8 bits entre o registro de deslocamento e os pinos de saída ( Q A para Q H )
Finalmente, “Shift clock” é puxado para baixo pelo microprocessador. Isso completa a mudança de um bit para o '595.
O procedimento acima é repetido sete vezes mais para completar o deslocamento de 8 bits de dados do microprocessador para o registro de deslocamento de entrada serial e saída paralela 74AHC594.
Para transferir os 8 bits de dados dentro do registrador de deslocamento '595 interno para a saída, é necessário que o microprocessador gere uma transição de baixo para alto em RCLK , o relógio do registro de saída.
Isso aplica novos dados aos LEDs. O RCLK precisa ser reduzido em antecipação à próxima transferência de dados de 8 bits.
Os dados presentes na saída do '595 permanecerão até que o processo nos dois parágrafos acima seja repetido para novos 8 bits de dados.
Em particular, novos dados podem ser deslocados para o registrador de deslocamento interno '595 sem afetar os LEDs. Os LEDs só serão atualizados com novos dados com a aplicação do RCLK borda ascendente.
E se precisarmos acionar mais de oito LEDs? Simplesmente coloque em cascata outro 74AHC594 SER fixe no Q H ’ do shifter existente.
Paralelo ao SRCLK e RCLK alfinetes. O microprocessador precisaria transferir 16 bits de dados com 16 relógios antes de gerar um RCLK alimentando ambos os dispositivos.
Os indicadores LED discretos, que mostramos, podem ser LEDs de 7 segmentos. Porém, existem dispositivos LSI (Large Scale Integration) capazes de conduzir vários dígitos de 7 segmentos.
Este dispositivo aceita dados de um microprocessador em formato serial, conduzindo mais segmentos de LED do que pinos por meio da multiplexação dos LEDs.
PLANILHAS RELACIONADAS:
- Planilha de registros de turnos
Registradores de deslocamento:Conversão de entrada paralela, saída de série (PISO)
Registradores de deslocamento universal:entrada paralela, saída paralela
Tecnologia industrial
- Mudança de fase
- Conversão de octal e hexadecimal em decimal
- Conversão de numeração decimal
- Introdução aos registros de deslocamento
- Conversão de tipo C#
- A pandemia está acelerando a mudança para a impressão 3D
- C# - Conversão de tipo
- Revestimento de conversão de filme químico para chapas metálicas
- Estrela para Delta e Delta para Estrela. Transformação Y-Δ
- O que é Revestimento de Passivação e Conversão | CNCLATHING Serviços de acabamento de superfície