


O que é um motor de passo? Tipos, construção, operação e aplicações
Tipos de motores de passo – sua construção, operação de trabalho e aplicações
A invenção de cartões de driver de motor de passo dedicados e outras tecnologias de controle digital para interfacear um motor de passo para sistemas baseados em PC são a razão para a ampla aceitação de motores de passo nos últimos tempos. Os motores de passo tornam-se a escolha ideal para sistemas de automação que exigem controle preciso de velocidade ou posicionamento preciso ou ambos.
Como sabemos que muitos motores elétricos industriais são usados com controle de feedback de malha fechada para obter um posicionamento preciso ou controle preciso de velocidade, por outro lado, um motor de passo capaz de operar em um controlador de malha aberta. Isso, por sua vez, reduz o custo total do sistema e simplifica o projeto da máquina em comparação com o controle do sistema servo. Vamos discutir brevemente sobre motor de passo e seus tipos . 
- Post relacionado:Servomotor – Tipos, Construção, Funcionamento e Aplicações
O que é um Motor de Passo?
Motor de passo é um dispositivo eletromecânico sem escova que converte o trem de pulsos elétricos aplicados em seus enrolamentos de excitação em rotação de eixo mecânica passo a passo precisamente definida. O eixo do motor gira em um ângulo fixo para cada pulso discreto. Esta rotação pode ser linear ou angular. Obtém um movimento de um passo para uma única entrada de pulso.
Quando um trem de pulsos é aplicado, ele gira em um determinado ângulo. O ângulo através do qual o eixo do motor de passo gira para cada pulso é referido como o ângulo de passo, que é geralmente expresso em graus.
O número de pulsos de entrada dado ao motor decide o ângulo do passo e, portanto, a posição do eixo do motor é controlada pelo número de pulsos. Esse recurso exclusivo torna o motor de passo adequado para o sistema de controle de malha aberta, em que a posição precisa do eixo é mantida com o número exato de pulsos sem o uso de um sensor de feedback.
Se o ângulo do passo for menor, maior será o número de passos por revoluções e maior será a precisão da posição obtida. Os ângulos de passo podem ser tão grandes quanto 90 graus e tão pequenos quanto 0,72 graus, no entanto, os ângulos de passo comumente usados são 1,8 graus, 2,5 graus, 7,5 graus e 15 graus.
O sentido de rotação do eixo depende da seqüência de pulsos aplicada ao estator. A velocidade do eixo ou a velocidade média do motor é diretamente proporcional à frequência (a taxa de pulsos de entrada) dos pulsos de entrada aplicados nos enrolamentos de excitação. Portanto, se a frequência for baixa, o motor de passo gira em etapas e, para alta frequência, gira continuamente como um motor CC devido à inércia.
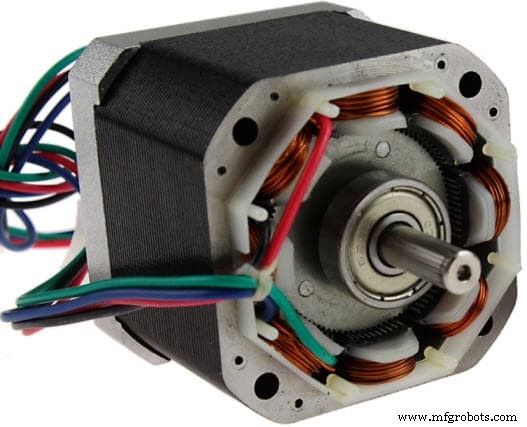
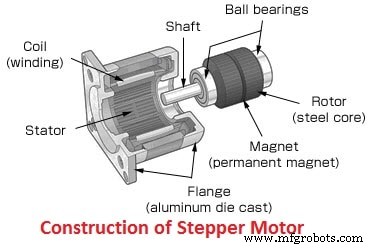
Como todos os motores elétricos, possui estator e rotor. O rotor é a parte móvel que não possui enrolamentos, escovas e comutador. Normalmente, os rotores são do tipo de relutância variável ou de ímã permanente. O estator é frequentemente construído com enrolamentos multipolares e multifásicos, geralmente de enrolamentos trifásicos ou quadrifásicos enrolados para um número necessário de polos decidido pelo deslocamento angular desejado por pulso de entrada.
Ao contrário de outros motores, ele opera em pulsos de controle discreto programados que são aplicados aos enrolamentos do estator por meio de um acionamento eletrônico. A rotação ocorre devido à interação magnética entre os pólos do enrolamento do estator energizado sequencialmente e os pólos do rotor.
Existem vários tipos de motores de passo estão disponíveis no mercado atual em uma ampla variedade de tamanhos, contagem de passos, construções, fiação, engrenagens e outras características elétricas. Como esses motores são capazes de operar em natureza discreta, eles são adequados para fazer interface com dispositivos de controle digital como computadores.
Devido ao controle preciso de velocidade, rotação, direção e posição angular, são de particular interesse em sistemas de controle de processos industriais, máquinas CNC, robótica, sistemas de automação de fabricação e instrumentação.
- Post relacionado:Motor CC sem escovas – construção, princípio de funcionamento e aplicações
Tipos de motores de passo
Existem três categorias básicas de motores de passo , ou seja
- Motor de passo de ímã permanente
- Motor de passo de relutância variável
- Motor de passo híbrido
Em todos esses motores são empregados enrolamentos de excitação no estator onde o número de enrolamentos se refere ao número de fases.
Uma tensão CC é aplicada como excitação às bobinas dos enrolamentos e cada terminal do enrolamento é conectado à fonte por meio de uma chave de estado sólido. Dependendo do tipo de motor de passo, seu projeto de rotor é construído como rotor de aço macio com pólos salientes, rotor de ímã permanente cilíndrico e ímã permanente com dentes de aço macio. Vamos discutir esses tipos em detalhes.
- Você também pode ler:Conexão do motor trifásico Estrela/Delta (Y-Δ) Reverso/Avanço com Diagrama de Controle e Potência do Temporizador
Motor de passo de relutância variável
É o tipo básico de motor de passo que existe há muito tempo e garante uma maneira mais fácil de entender o princípio de operação do ponto de vista estrutural. Como o nome sugere, a posição angular do rotor depende da relutância do circuito magnético formado entre os pólos do estator (dentes) e os dentes do rotor.

Construção de Motor de Passo de Relutância Variável
Consiste em um estator enrolado e um rotor de vários dentes de ferro macio. O estator tem uma pilha de lâminas de aço silício nas quais os enrolamentos do estator são enrolados. Normalmente, é enrolado por três fases que são distribuídas entre os pares de pólos.
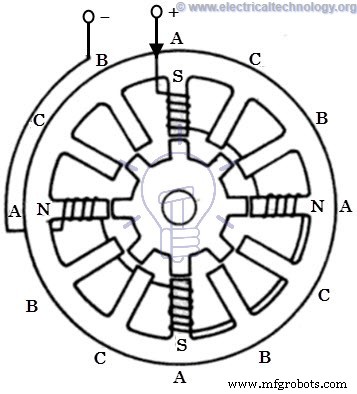
O número de pólos no estator assim formados é igual a um múltiplo par do número de fases para as quais os enrolamentos são enrolados no estator. Na figura abaixo, o estator possui 12 pólos salientes igualmente espaçados onde cada pólo é enrolado com uma bobina de excitação. Essas três fases são energizadas a partir de uma fonte CC com a ajuda de chaves de estado sólido.
O rotor não possui enrolamentos e é do tipo pólo saliente feito inteiramente de chapas de aço ranhuradas. Os dentes projetados do pólo do rotor têm a mesma largura dos dentes do estator. O número de pólos no estator difere do número de pólos do rotor, o que fornece a capacidade de auto-partida e rotação bidirecional do motor.
A relação dos pólos do rotor em termos dos pólos do estator para um motor de passo trifásico é dada como, Nr =Ns ± (Ns / q). Aqui Ns =12 e q =3 e, portanto, Nr =12 ± (12 / 3) =16 ou 8. Um rotor de construção de 8 pólos sem qualquer excitação é ilustrado abaixo.
Funcionamento do motor de passo de relutância variável
O motor de passo funciona de acordo com o princípio que o rotor se alinha em uma posição particular com os dentes do pólo de excitação em um circuito magnético em que existe um caminho de relutância mínimo. Sempre que a energia é aplicada ao motor e excitando um enrolamento específico, ele produz seu campo magnético e desenvolve seus próprios pólos magnéticos.
Devido ao magnetismo residual nos pólos do ímã do rotor, ele fará com que o rotor se mova em tal posição de modo a atingir a posição de relutância mínima e, portanto, um conjunto de pólos do rotor alinha com o conjunto energizado de pólos do estator. Nesta posição, o eixo do campo magnético do estator coincide com o eixo que passa por quaisquer dois pólos magnéticos do rotor.
Quando o rotor se alinha com os pólos do estator, ele tem força magnética suficiente para impedir que o eixo se mova para a próxima posição, no sentido horário ou anti-horário.
Considere o diagrama esquemático de um estator trifásico, 6 pólos e 4 dentes do rotor mostrado na figura abaixo. Quando a fase A-A' é alimentada com alimentação CC, fechando o interruptor -1, o enrolamento se torna um ímã, o que faz com que um dente se torne Norte e outro Sul. Assim, o eixo magnético do estator fica ao longo desses pólos.
Devido à força de atração, o pólo norte da bobina do estator atrai o dente do rotor mais próximo de polaridade oposta, ou seja, o pólo sul e o pólo sul atraem o dente do rotor mais próximo de polaridade oposta, ou seja, o norte. O rotor então se ajusta à sua posição de relutância mínima, onde o eixo magnético do rotor corresponde exatamente ao eixo magnético do estator.
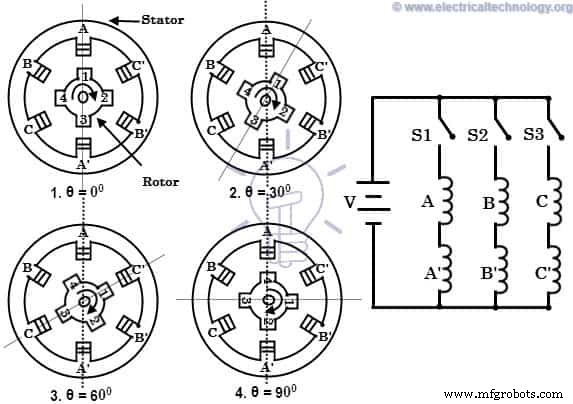
Quando a fase B-B' é energizada por fechando a chave -2 mantendo a fase A-A' desenergizada pela abertura da chave-1, o enrolamento B-B' produzirá o fluxo magnético e, portanto, o eixo magnético do estator se desloca ao longo dos pólos assim formados por ele. Assim, o rotor se desloca para a menor relutância com os dentes do estator magnetizados e gira em um ângulo de 30 graus no sentido horário.
Quando a chave-3 é energizada após a abertura da chave-2, a fase C-C' é energizada, os dentes do rotor se alinham com a nova posição movendo-se por um ângulo adicional de 30 graus. Desta forma, o rotor se move no sentido horário ou anti-horário excitando sucessivamente os enrolamentos do estator em uma sequência particular. O ângulo de passo deste motor de passo de dentes de rotor trifásico de 4 pólos é expresso como 360/ (4 × 3) =30 graus (como ângulo de passo =360 / Nr × q).
O ângulo de passo pode ser ainda mais reduzido aumentando o número de pólos no estator e rotor, neste caso os motores são frequentemente enrolados com enrolamentos de fase adicionais. Isso também pode ser alcançado adotando diferentesconstruções de motores de passo como arranjo multipilha e mecanismo de engrenagem de redução.
- Você também pode ler:Conexão do motor trifásico STAR/DELTA sem diagramas de energia e controle do temporizador
Motor de passo de ímã permanente
O motor de design de ímã permanente é talvez o mais comum entre vários tipos de motores de passo. Como o nome indica, adiciona ímãs permanentes à construção do motor. Esse tipo de motor de passo também é conhecido como motor de empilhamento de lata ou motor de lata . A principal vantagem deste motor é o seu baixo custo de fabricação. Este tipo de motor tem 48-24 passos por revolução.

Motor de passo de ímã permanente de construção
Neste motor, o estator é multipolar e sua construção é semelhante à do motor de passo de relutância variável, conforme discutido acima. Consiste em uma periferia ranhurada na qual as bobinas do estator são enroladas. Possui polos projetados na estrutura ranhurada onde os enrolamentos podem ser bifásicos, trifásicos ou quadrifásicos.
Os terminais finais de todos esses enrolamentos são comprados e conectados à excitação CC por meio de interruptores de estado sólido no circuito de acionamento.
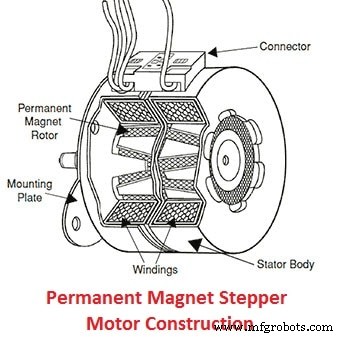
O rotor é feito de um material de ímã permanente como uma ferrita que pode ter a forma de pólo cilíndrico ou saliente, mas geralmente é do tipo cilíndrico liso. O rotor foi projetado para ter um número par de pólos magnéticos permanentes com polaridades norte e sul alternadas.
Funcionamento do motor de passo de ímã permanente
O funcionamento deste motor funciona com base no princípio de que pólos diferentes se atraem e pólos iguais se repelem. Quando os enrolamentos do estator são excitados com uma alimentação CC, produz fluxo magnético e estabelece os pólos Norte e Sul. Devido à força de atração e repulsão entre os pólos do rotor do ímã permanente e os pólos do estator, o rotor começa a se mover até a posição para a qual os pulsos são dados ao estator.
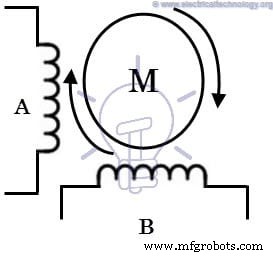
Considere um motor de passo bifásico com dois pólos magnéticos permanentes do rotor, conforme mostrado na figura abaixo.
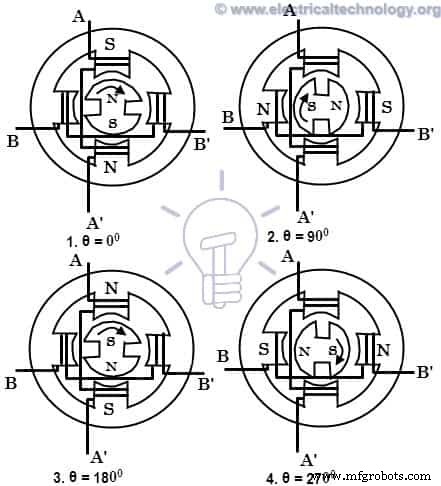
Quando a fase A é energizada com um positivo com em relação ao A', os enrolamentos estabelecem os pólos Norte e Sul. Devido à força de atração, os pólos do rotor se alinham com os pólos do estator, de modo que o eixo do pólo magnético do rotor se ajusta ao do estator, conforme mostrado na figura.
Quando a excitação é comutada para a fase B e desligando a fase A, o rotor se ajusta ainda mais ao eixo magnético da fase B e, portanto, gira 90 graus no sentido horário.
A seguir, se a fase A for energizada com uma corrente negativa em relação a A', a formação de pólos do estator faz com que o rotor se mova mais 90 graus no sentido horário.
Da mesma forma, se a fase B é excitada com corrente negativa fechando a chave da fase A, o rotor gira mais 90 graus na mesma direção. Em seguida, se a fase A for excitada com corrente positiva, o rotor volta para a posição original fazendo uma revolução completa de 360 graus. Isso implica que, sempre que o estator é excitado, o rotor tende a girar 90 graus no sentido horário.
O ângulo de passo deste motor de rotor de ímã permanente de 2 pólos de 2 fases é expresso como 360/ (2 × 2) =90 graus. O tamanho do passo pode ser reduzido energizando duas fases simultaneamente ou uma sequência de modos 1-phase ON e 2-phase ON com uma polaridade adequada.
- Você também pode ler:Termos e definições relacionados ao controle e proteção do motor
Motor de passo híbrido
É o tipo mais popular de motor de passo pois oferece melhor desempenho do que o rotor de ímã permanente em termos de resolução de passo, torque de retenção e velocidade. No entanto, esses motores são mais caros que os motores de passo PM. It combines the best features of both variable reluctance and permanent magnet stepper motors. These motors are used in applications that require very small stepping angle such as 1.5, 1.8 and 2.5 degrees.

Construction of Hybrid Stepper Motor
The stator of this motor is same as its permanent magnet or reluctance type counterpart. The stator coils are wound on alternate poles. In this, the coils of different phases are wound on each pole, usually two coils at a pole which is referred as a bifilar connection.
The rotor consists of a permanent magnet which is magnetized in axial direction to create a pair of magnetic poles (N and S poles). Each pole is covered with uniformly spaced teeth. The teeth are made up of soft steel and two section, of which on each pole are misaligned each other by a half-tooth pitch.
- Related Post Why Electric Motors rated in kW instead of kVA?
Working of Hybrid Stepper Motor
This motor works similar to that of permanent magnet stepper motor. The figure above shows 2-phase, 4-pole, 6-tooth rotor hybrid stepper motor. When the phase A-A’ is excited with a DC supply, keeping B-B’ unexcited, the rotor aligns such that the south pole of the rotor faces north pole of the stator while north pole of rotor faces south pole of the stator.
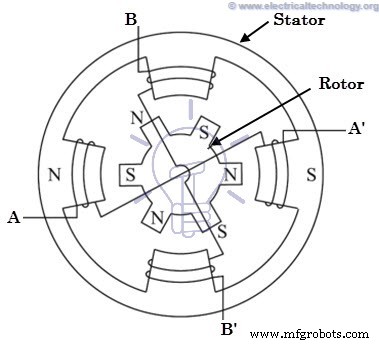
Now, if the phase B-B’ is excited, keeping A-A’ switched off in such a way that upper pole becomes north and lower becomes south, then the rotor will align to a new position by moving through counterclockwise direction. If the phase B-B’ is oppositely excited such that the upper pole becomes south and lower becomes north, then the rotor will turn clockwise direction.
By a proper sequence of pulses to the stator, the motor will turn in desired direction. For every excitation, rotor will get locked into new position, and even if excitation is removed motor still maintains its locked condition due to the permanent magnet excitation. The step angle of this 2-phase, 4-pole, 6-tooth rotor motor is given as 360/ (2 × 6) =30 degrees. In practice, hybrid motors are constructed with more number of rotor poles in order to get high angular resolution.
- Related Post:What is Motor Efficiency &How to improve it?
Unipolar and Bipolar Stepper Motors
The above discussed motors can be unipolar or bipolar based on the coil winding arrangements. A unipolar motor is employed with two windings per phase and hence the direction of current flow through these windings changes the rotation of the motor. In this configuration, the current flow is through one direction in one coil and opposite direction in another coil.
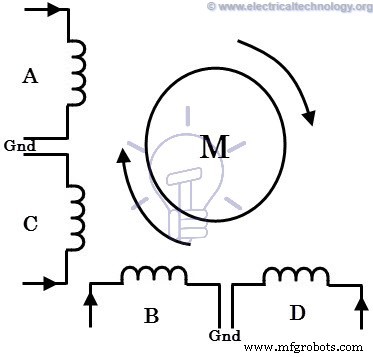
The figure below shows 2-phase unipolar stepper motor wherein A and C coils are for one phase and B and D are for other phase. In each phase each coil carries current in opposite direction to that of other coil. Only one coil will be carrying current at a time in each phase for achieving particular direction of rotation. So just by switching the terminals to each coil, the direction of rotation is controlled.
In case of a bipolar stepper motor, each phase consists of a single winding rather than two in case of unipolar one. In this, the direction of rotation is controlled by reversing the current through the windings. Hence, it requires a complex drive circuit for current reversal.
- You may also read:What is a Solenoid and Solenoid Magnetic Field
Stepping Modes of a Stepper Motor
A typical stepping action causes the motor to step through a sequence of equilibrium positions in response to current pulses given to it. It is possible to vary the stepping action in different ways simply by changing the sequence through which stator windings are energized. The following are the most common operating or driving modes of stepper motors.
- Wave step
- Full step
- Half step
- Microstepping
Wave Step Mode
Wave step mode is the simplest of all other modes in which only one winding is energized at any given time. Each coil of the phase is connected to the supply alternatively. The table below shows the order through which coils are energized in a 4-phase stepper motor.
In this mode motor gives maximum step angle compared to all other modes. It is the simplest and most commonly used mode for stepping; however the torque produced is less as it uses some part of the total winding at a given time. 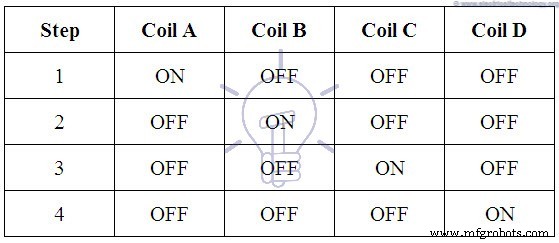
Full Step Mode
In this drive or mode, two stator phases are energized simultaneously at any given time. When two phases are energized together, the rotor will experience the torque from both phases and comes to the equilibrium position, which will be interleaved between two adjacent wave step positions or 1-phase excitations. So this step provides better holding torque than wave step. The table below shows the full step drive for 4-phase stepper motor. 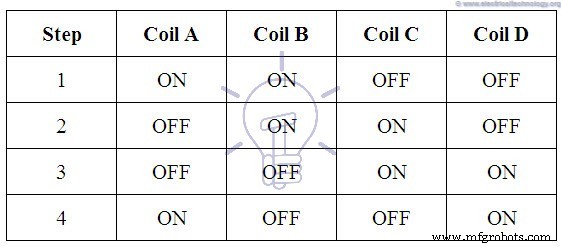
Half Step Mode
It is the combination of both wave and full step modes. In this, single phase and dual phase excitations are carried out alternatively, i.e., one-phase ON, two-phases ON, and so on. The step angle in this mode becomes half of the full step angle. This drive mode has highest torque and stability compared to all other modes. The table containing phase pulsing sequence for a 4-phase motor in half stepping is given below. 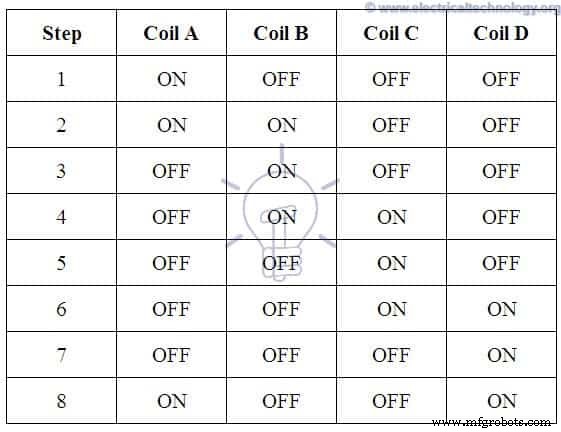
Microstepping Mode
In this mode, each motor step is subdivided into several small steps, even hundreds of fixed positions, therefore a greater positioning resolution is obtained. In this, currents through the windings are continually varied in order to get very small steps. In this, two phases are excited simultaneously, but with the unequal currents in each phase.
For example, the current through phase -1 is held constant while the current through phase-2 is incremented in steps till the maximum value of current, whether it is negative or positive. The current in the phase-1 is then decreased or increased in steps till zero. Thus, the motor will produce a small step size.
All these stepping modes can be obtained by each type of stepper motor discussed above. However, the direction of current in each winding during these steps can be varied depending on the type of motor and either it is unipolar or bipolar.
- Related Post Cable Size Calculation for LT &HT Motors
Advantages of Stepper Motor
- At standstill position, the motor has full torque. No matter if there is no moment or changing position.
- It has a good response to starting, stopping and reversing position.
- As there is no contact brushes in the stepper motor, It is reliable and the life expectancy depends on the bearings of the motor.
- The motor rotation angle is directly proportional to the input signals.
- It is simple and less costly to control as motor provides open loop control when responding to the digital input signals.
- The motor speed is directly proportional to the input pulses frequency, this way a wide range of rotational speed can be achieved.
- When load is coupled to the shaft, it is still possible to realize the synchronous rotation with low speed.
- The exact positioning and repeatability of movement is good as it has a 3-5% accuracy of a step where the error is non cumulative from one step to another.
- Stepper motors are safer and low cost (as compared to servo motors), having high torque at low speeds, high reliability with simple construction which operates at any environment.
Disadvantages of Stepper Motors
- Stepper motors having low Efficiency.
- It has low Accuracy.
- Its torque declines very quickly with speed.
- As stepper motor operates in open loop control, there is no feedback to indicate potential missed steps.
- It has low torque to inertia ratio means it can’t accelerate the load very quickly.
- They are noisy.
Applications of Stepper Motors
- Stepper motors are used in automated production equipments and automotive gauges and industrial machines like packaging, labeling, filling and cutting etc.
- It is widely used in security devices such as security &surveillance cameras.
- In medical industry, stepper motors are widely used in samples, digital dental photography, respirators, fluid pumps, blood analysis machinery and medical scanners etc.
- They are used in consumer electronics in image scanners, photo copier and printing machines and in digital camera for automatic zoom and focus functions and positions.
- Stepper motors also used in elevators, conveyor belts and lane diverters.
Você também pode ler:
- DC Drives – Construction, Working &Classification of Electrical DC Drives
- Three Phase Motor Power &Control Wiring Diagrams
- Electric Motors Library (AC &DC )
Tecnologia industrial
- O que é impressão 3D? Princípio de funcionamento | Tipos | Aplicativos
- O que é estampagem? - Tipos, operação e aplicação
- O que é Torneamento? - Definição e Tipos de Operação
- O que é soldagem?- Definição | Tipos de Soldagem
- O que é Casting?- Definição| Tipos de Fundição
- O que é Power Hammers? - Tipos, Design e Operação
- Para que serve o Monel?
- Quais são os diferentes tipos de construção de porão?
- O que é um Strongback?
- O que é um Motor Linear?