


Tutorial de servo motor para iniciantes – Electronicslovers.com
Servo motores também são amplamente utilizados em robótica como nas INDÚSTRIAS, o servo é o coração dos projetos de ROBÓTICA hoje em dia, como braço robótico, carros RC, antena parabólica, esteiras transportadoras, posicionamento de antena, foco automático de câmera, processo de impressão etc.
Em muitos projetos de hobby, servomotores são amplamente utilizados. Espero que este artigo forneça uma breve informação do que realmente é um servo, o princípio básico de funcionamento de um servo motor, diferentes variedades de servos, comparação básica entre servo motor e um motor DC normal.

Definição do Servo Motor:
“ É um dispositivo que fornece movimento em resposta a um comando quando regula o movimento em resposta a um feedback negativo. “
A principal característica do servo é controlar com precisão a posição de seu eixo. É basicamente um sistema de circuito fechado (ou seja, feedback negativo).
Existem quatro partes principais no sistema de circuito fechado de servo:
- Motor CC.
- Circuito de controle.
- Engrenagens.
- Sensor de feedback de posição.
A parte principal de um servo motor é um pequeno motor CC. Esses motores dc são de alta velocidade (ou seja, alta RPM) e torque muito baixo (ou seja, força de torção responsável pela execução do trabalho). Basicamente, motores CC pequenos são de velocidade muito alta, mas não possuem torque muito maior (ou seja, força pequena e distância maior). Mas o design das engrenagens dentro do servo converte essa alta velocidade e baixo torque de um motor dc em uma velocidade mais lenta e maior torque (ou seja, uma pequena distância, maior força).
Muitos motores CC são mais rápidos em torno de 5.000 RPM, mas as engrenagens reduzem essa RPM muito alta para cerca de 60 RPM e alto torque. Os servos que são baratos têm suas engrenagens feitas de plástico para manter seu peso mais leve e de baixo custo, enquanto os servos projetados para trabalhos mais pesados (ou seja, torque muito alto) têm suas engrenagens feitas de metal, por exemplo, servos usados em indústrias .
Quando a energia é aplicada pela primeira vez ao servo através da linha de entrada, o motor CC gira para uma RPM muito alta e um torque muito pequeno, mas devido às engrenagens, o eixo do servo é desacelerado.
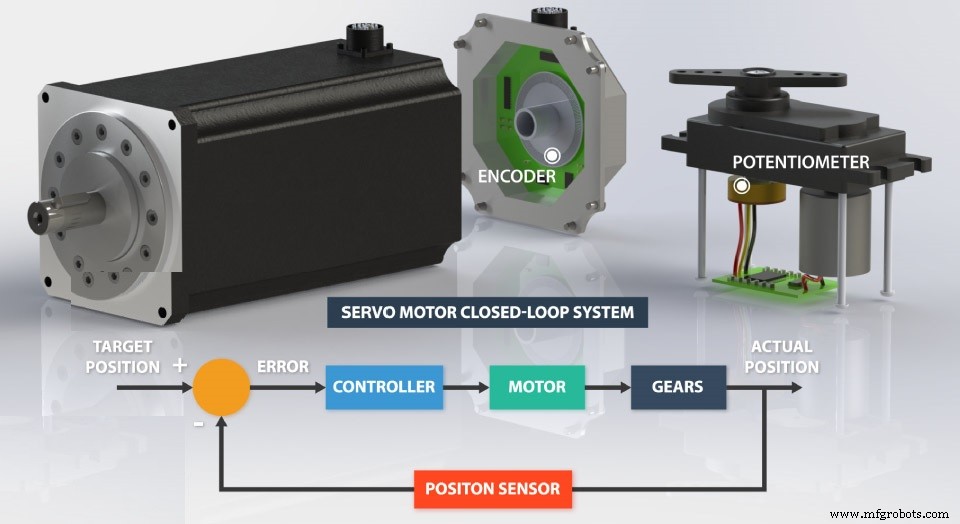 Uma vez que o sensor de feedback de posição está conectado em um arranjo de feedback negativo para controlar a posição de um servo precisamente para a posição desejada. Nos servos industriais, o sensor de feedback de posição é um codificador de alta precisão, mas em um hobby, o sensor posicional do servo é um potenciômetro. O sensor posicional (ou seja, potenciômetro) na engrenagem final é conectado ao circuito que contém o detector de erros (ou seja, este detector de erros é basicamente um comparador que compara dois sinais um é da linha de entrada também chamada de posição alvo e outro é da saída através de potenciômetro também chamado de posição real) e um controlador IC embutido na placa.
Uma vez que o sensor de feedback de posição está conectado em um arranjo de feedback negativo para controlar a posição de um servo precisamente para a posição desejada. Nos servos industriais, o sensor de feedback de posição é um codificador de alta precisão, mas em um hobby, o sensor posicional do servo é um potenciômetro. O sensor posicional (ou seja, potenciômetro) na engrenagem final é conectado ao circuito que contém o detector de erros (ou seja, este detector de erros é basicamente um comparador que compara dois sinais um é da linha de entrada também chamada de posição alvo e outro é da saída através de potenciômetro também chamado de posição real) e um controlador IC embutido na placa.
Devido à rotação das engrenagens, o botão do potenciômetro gira, como resultado, são produzidas as tensões que são conectadas ao detector de erros. Agora o erro produzido devido à comparação de dois sinais pelo comparador, que está conectado ao controlador IC (ou seja, este controlador é um H-Bridge integrado em um chip). Após a comparação, é produzido um erro que permite ao controlador decidir a rotação do eixo em qualquer direção para atingir a posição alvo. 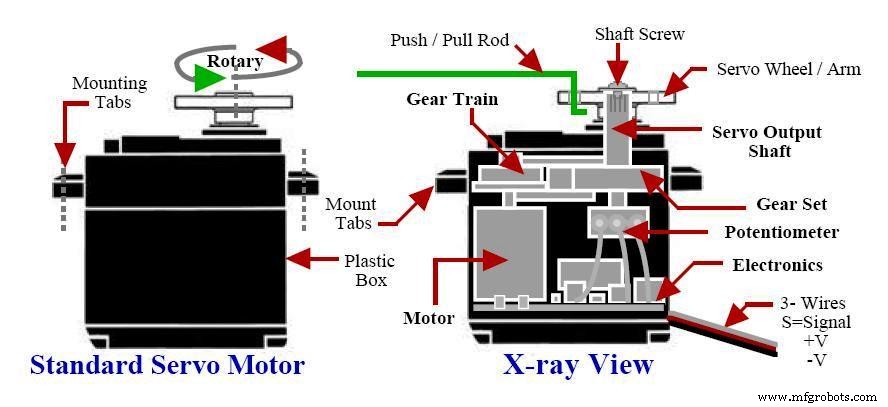
Tipos de SERVO'S:
Os servos estão disponíveis em diferentes variedades.
- SERVO DE ROTAÇÃO POSICIONAL:
O eixo de saída girará apenas 180 graus. Paradas adicionais estão situadas para limitar a rotação adicional do eixo fora de sua faixa (por exemplo:braços ROBOTIC, lemes, etc.)
- SERVIÇO ROTATIVO CONTÍNUO:
É semelhante ao servo de rotação posicional, mas pode girar 360 graus continuamente. Os comandos enviados ao servo farão com que ele gire no sentido horário ou anti-horário em velocidade variável (por exemplo:prato RADAR etc).
- SERVIÇO LINEAR:
O movimento deste servo é para frente e para trás em vez de direção circular (por exemplo:máquina CNC, impressoras 3D etc).
COMPARAÇÃO BÁSICA ENTRE SERVO E MOTOR CC:
Os servomotores podem girar 180 graus para frente e para trás, mas os motores CC podem girar 360 graus, desde que a alimentação seja aplicada. O servo hoje em dia também está disponível na rotação contínua que pode girar em 360 graus, mas devido ao design da engrenagem, a velocidade do servo é menor em comparação com o motor dc. Motores DC são a melhor escolha para robôs de movimento livre, enquanto que quando precisamos de precisão (por exemplo:ROBOTIC ARM, limpadores de lemes de barcos etc) servo é a melhor escolha.
A velocidade do motor CC é controlada pela técnica PWM (modulação por largura de pulso) (ou seja, variando o ciclo de trabalho podemos controlar a velocidade do motor CC). Por exemplo:ciclo de trabalho maior que 50% significa que a velocidade é mais rápida, um ciclo de trabalho menor que 50% significa que a velocidade é mais lenta.
Enquanto a técnica PWM no servo motor determina a posição do seu eixo ao invés da velocidade. Uma vez que o comando é enviado ao servo, ele definirá com precisão a posição do eixo para a posição desejada. Assim, este comportamento de ajuste automático de seu eixo faz com que o servo seja a escolha perfeita para aplicação em ROBÓTICA.
Tecnologia industrial
- Renesas expande opções de microcontrolador para controle de servo em robôs industriais
- Construir robôs Raspberry Pi:Melhor tutorial para iniciantes
- Robô Pi Simples
- Linguagem de Programação C PDF:Tutorial Básico para Iniciantes
- Especialistas em Reparo de Motor Servo Fanuc
- Dicas para reparos e solução de problemas do servo motor
- Para que tipo de cortador a laser o servomotor é adequado?
- Cabos de motor para inversores de velocidade variável
- Uma visão geral para iniciantes:o que é fabricação de metal?
- A beleza da caixa de engrenagens planetária para servo motor