


Robô Raspberry Pi:Como construir um robô Raspberry Pi
Framboesa Pi
Você está achando complicado e complexo construir um robô Raspberry Pi? Então você está no lugar certo.
De fato, usar uma placa Pi para o seu robô lhe daria um computador completo a um preço acessível. Portanto, quando você combina isso com seu formato pequeno e amplo suporte da comunidade, será uma ótima placa, mesmo para iniciantes.
No entanto, mergulhar no mundo da robótica significa mergulhar em projetos de circuitos mais avançados. Mas não se preocupe, vamos facilitar ao máximo. https://www.wellpcb.com/
Portanto, neste artigo, abordaremos como construir um robô Raspberry Pi e os diferentes projetos de robô Pi que você pode fazer.
Como construir um robô Raspberry Pi
Aqui, mostraremos como construir um robô Pi amigável para iniciantes que pode evitar obstáculos e navegar livremente. Aqui estão as peças que você precisa para este projeto:
- Raspberry Pi (modelos B, B+ ou 2)
- Motores DC com engrenagem (1)
- Roda de rodízio (1)
- Cartão SD (1)
- Rato (1)
- Botão (1)
- Rato (1)
- Resistor de 200R (1)
- Breadboard (1)
- Fita dupla face (1)
- Teclado
- Driver L293D (1)
- Homens para homens ou mulheres para mulheres (1)
- Chassis e rodas do robô (1)
- Módulos de sensor infravermelho (1)
Construindo o projeto
Primeiro, temos que conectar o sensor IR ao Raspberry Pi. Então, para fazer isso, coloque seu Raspberry Pi depois de conectá-lo ao teclado, mouse e monitor. Em seguida, clique no seu sensor e verifique se ele está funcionando corretamente.
Depois, conecte o pino de 5V do Pi e o pino GND ao sensor da fonte de alimentação. Em seguida, clique no pino B do sensor nos pinos 16 e 3 do GPIO. Por fim, verifique a configuração dos pinos do GPIO.BOARD.
Em seguida, insira o seguinte código e salve-o como um arquivo Python, de preferência irtest.py.
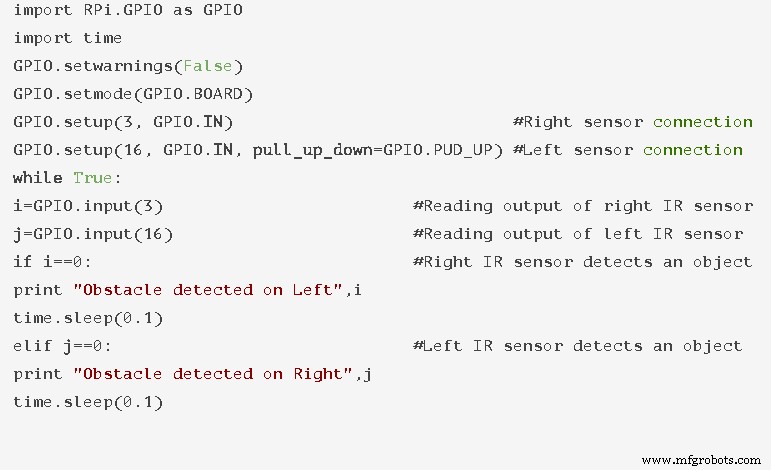
Código para arquivo Python
Depois de salvar e executar o arquivo python, você notará as seguintes impressões de saída ao bloquear o sensor:
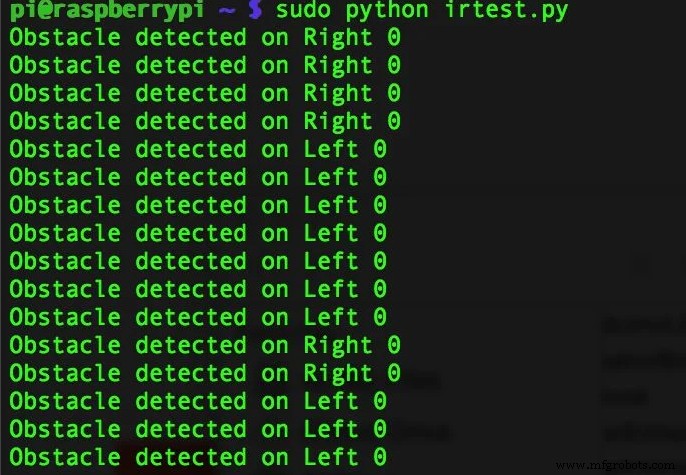
Impressões de saída para arquivo Python
Portanto, tente verificar suas conexões ou substituir seus componentes se não funcionar.
Conecte seus motores com o L293D
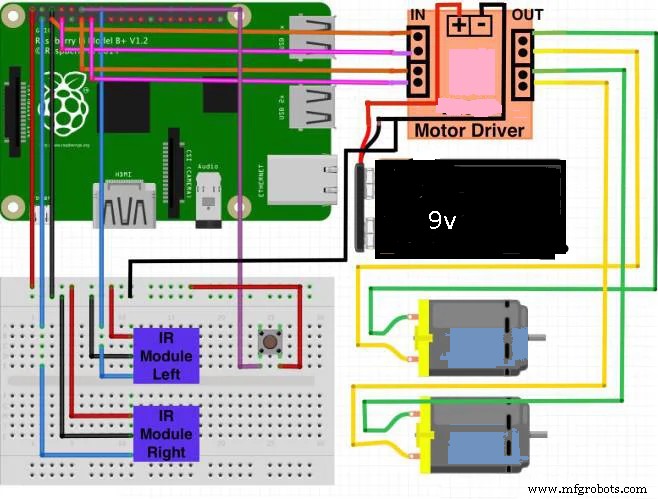
Agora, usaremos o módulo L293D para conectar os motores. Mas, primeiro, forneça energia ao L293D através dos pinos + e –. Em seguida, conecte também esses pinos de alimentação à placa da bateria de 9v.
Conexão de circuito completo
Além disso, conecte o pino – do L293D ao pino GND do Pi. Confira o diagrama abaixo para obter uma imagem clara das conexões.
Além disso, use quatro pinos GPIO de saída para criar entradas para a placa. Além disso, você pode usar esses pinos de saída para controlar em qual direção os dois motores irão girar.
Além disso, você pode conectar os dois terminais do motor aos quatro terminais de saída da placa. Por fim, anexe um botão para ativar ou desativar seu robô para sua última conexão.
Construção final
Agora você pode adicionar rodas aos seus motores e montar suas conexões no chassi do seu robô. Certifique-se de prender as peças com fita dupla face para evitar cair.
Não se esqueça de testar seus motores com o código abaixo. Além disso, certifique-se de salvar o código como um arquivo python:moto.py. Em seguida, use o comando sudo motor.py para executar o código. Seus motores devem começar a girar se funcionar.
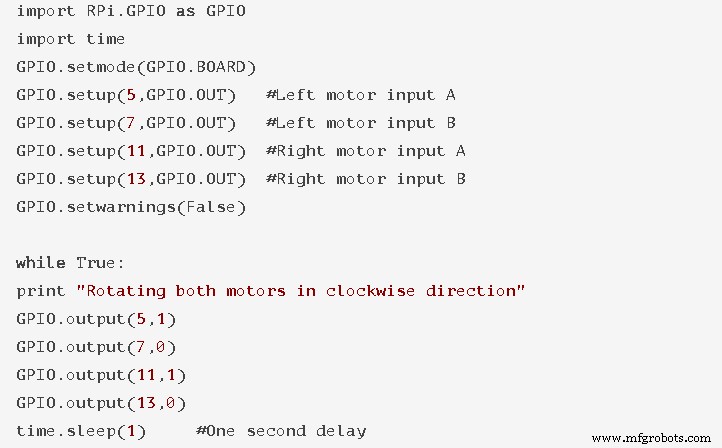
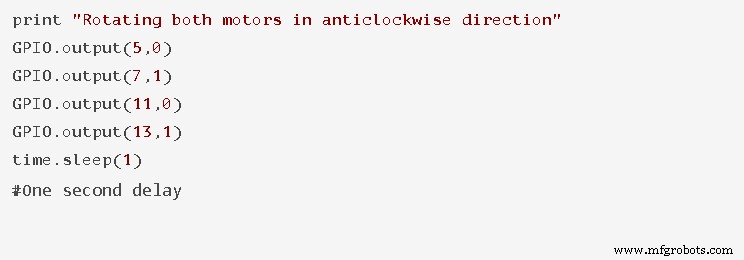
Código para testes de motores
Como funciona
Quando você pressiona o botão, o robô será ativado e começará a se mover. Enquanto avança, o robô procurará quaisquer objetos que bloqueiem seu caminho com o sensor IR. Uma vez que detecta um obstáculo, o Pi permitirá que o robô manobre ao redor do obstáculo. Novamente, você pode desativar o robô pressionando o botão.
Projetos de robô Raspberry Pi
Portanto, se você concluiu o projeto fácil acima e está procurando mais desafios, aqui estão algumas excelentes ideias de projetos para experimentar.
1. Robô quadrúpede CHOP

Robô quadrúpede picado
De fato, o robô quadrúpede chop é um projeto de bricolage semelhante ao local do Boston Dynamics. Além disso, o projeto CHOP é de código aberto. Assim, você pode personalizá-lo e ajustá-lo com algumas peças impressas em 3D e outros materiais.
Sem dúvida, o Raspberry Pi 4B e um Arduino Mega são os componentes significativos deste robô. Além disso, o Arduino filtra os dados dos sensores e se conecta aos servocontroladores. Por outro lado, o Pi coleta todos os dados e executa vários scripts Python para controlar o movimento do robô.
Além disso, o Pi usa um modelo cinemático inverso para controlar como os servos se movem. Por fim, você pode usar um controlador Bluetooth para controlar a direção do robô.
2. Robô de pingue-pongue
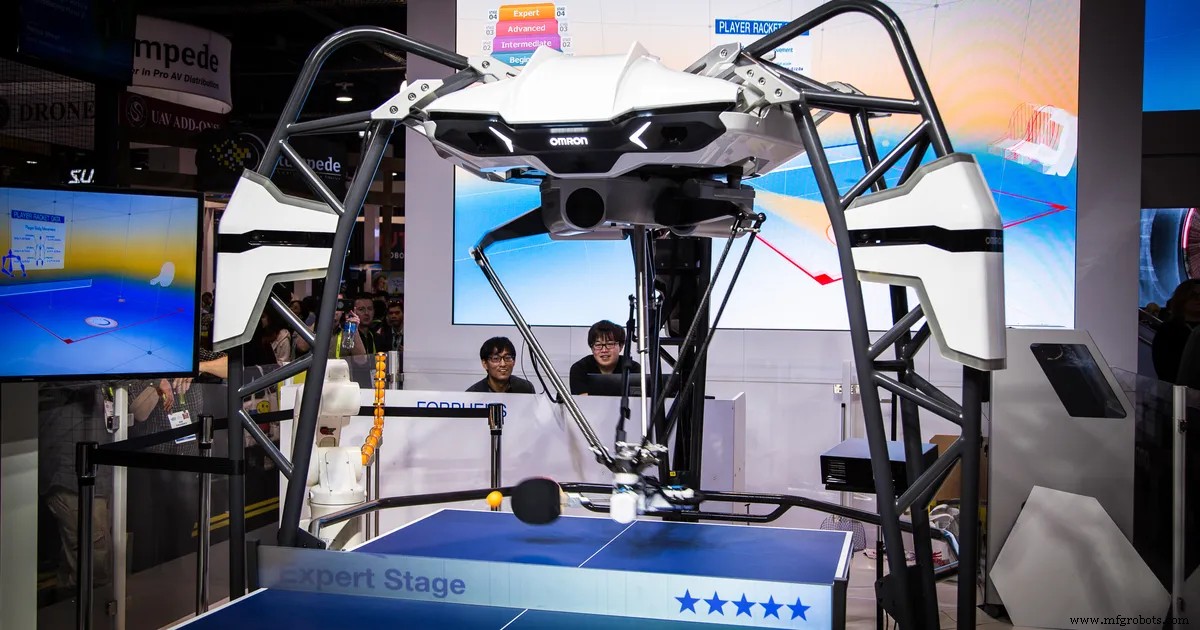
Robô de pingue-pongue
O robô de pingue-pongue é capaz de jogar tênis de mesa com humanos. E em diferentes níveis, do avançado ao simples.
Você usa o bot de pingue-pongue para jogos de lazer ou prática severa. No entanto, você pode comprar uma versão comercial por cerca de dois mil dólares. Ou, sem esforço, faça uma versão DIY com peças que você já possui, peças impressas em 3D e cortadas a laser.
Além disso, você pode se conectar ao bot por Wi-Fi e ter controle total.
3. Robô humanóide Raspberry Pi

Robô Humanoide
Você pode construir seu robô humanóide usando um Raspberry Pi. Alguns robôs humanóides têm recursos de prevenção de obstáculos, sensor de distância ultrassônico ou recursos de controle sem fio.
Independentemente do recurso, você precisará de um kit Robotics Bioloid, giroscópio e sensor de distância para este projeto.
Além disso, recomendamos usar o menor Raspberry Pi Zero e uma bateria de 2500 Mah de célula única para a fonte de alimentação.
Além disso, você precisará de um chip conversor analógico para digital para poder ler os dados do sensor.
4. Pi Roomba

Roomba
Se você tem experiência em robótica, provavelmente já ouviu falar de um aspirador de pó robô Roomba.
No entanto, você pode construir o seu com um Raspberry Pi e movimentos mais inteligentes.
Você precisará de uma interface serial do Roomba 530 para poder se conectar ao seu Raspberry Pi.
Além disso, você usará um pacote Javascript para a codificação. A caixa também usa um RxTX para se comunicar com o robô.
Além disso, você pode controlar o Roomba com um joystick e até definir sua saída de nível.
5. Robô Manteiga
O robô de manteiga inteligente pode gravar e transmitir vídeos com excelente qualidade. Além disso, ele pode gravar e emitir áudio.
A melhor parte é que você só precisa de um módulo de câmera Raspberry Pi e um dispositivo USB para capturar esses sons e vídeos.
No entanto, os componentes do robô incluem:
- Framboesa Pi Zero W
- Módulo de câmera RPi
- Motores CC
- placa de áudio USB
- Motorista L9110
- Liderado
- Bateria
- servos de 9g
- Interruptor deslizante
- Orador
Além disso, você pode usar este robô através do aplicativo Blynk, que suporta streaming de vídeo.
6. Gato Robótico Petoi
Você pode construir um adorável gato robótico com o projeto de gato mecânico de código aberto Nybble. Além disso, você pode usar peças de madeira cortadas a laser em vez de peças impressas em 3D.
Outros componentes para este projeto incluem um Raspberry Pi 3B+, o kit Nybble e um Sparkfun Arduino Pro Mini.
Além disso, você pode controlar o movimento deste robô com um microcontrolador compatível com Arduino. O gato robótico também pode armazenar memória muscular, o que permite que ele se lembre de como se mover.
Além disso, o Raspberry Pi neste projeto permite ajustar o código Nybble e dar comandos simples.
7. Ponto Micro
O micro spot é uma versão menor do popular robô quádruplo Spot. Além disso, você pode obter uma marcha trote e caminhada com “modos de controle de comando de ângulo” de três eixos.
O robô é executado em um Raspberry Pi 3B com Ubuntu. Além disso, ele usa uma estrutura C++ e Python.
Além disso, você precisará dos seguintes componentes do seu desejo para tentar este projeto:
- Framboesa Pi 3B
- painel LCD 15×2
- Placa servo PCA9685
- bateria de 4000 mah
- Regulador de tensão de 5V
- Peças impressas em 3D
- Lider (opcional para mapeamento de salas)
8. Robô de combate em miniatura
Você quer construir um poderoso robô de luta? Então você pode tentar este projeto. Usando o Raspberry Pi Zero, você pode traduzir entradas de um controlador Bluetooth em comandos para os controladores de motor do seu robô.
Em vez de usar um transmissor RC, o projeto usa uma configuração de pinos GPIO mais simples.
Ajudaria se você tivesse uma placa L298N para locomoção, um Tarot TL300G ESC para girar os motores brushless e uma bateria de 500Mah. E você tem um mini robô de combate em um chassi impresso em 3D.
9. Robô Devastador Raspberry Pi

Robô Devastador
Como o nome indica, você pode construir um tanque robótico com um Raspberry Pi Zero W. Toda a construção inclui um suporte personalizado impresso em 3D, algum código python e um circuito controlador de motor. Você também pode adicionar uma câmera montada.
Alternativamente, você pode encontrar tudo o que precisa para este projeto na plataforma móvel Devastator Tank.
Palavras finais
O Raspberry Pi é um minicomputador versátil que funciona para várias aplicações. A maioria dos projetos de robô Raspberry Pi listados neste artigo usa apenas Python amigável para iniciantes.
Além disso, se você não conseguir encontrar todos os componentes necessários para um projeto, tente kits robóticos. A compra de equipamentos automáticos forneceria detalhes prontos para o seu projeto de robô.
No entanto, você precisará de um conjunto de habilidades básicas ou intermediárias para tentar qualquer um desses projetos.
Você tem alguma pergunta? Sinta-se à vontade para entrar em contato conosco, e ficaremos felizes em ajudar.
Cartão NFC:os segredos por trás da comunicação de campo próximo
Sensor de gás Mq-3: O guia definitivo sobre um sensor de álcool
Tecnologia industrial
- Como as impressoras 3D constroem objetos de metal
- Como construir um circuito de espelho atual
- Como fazer uma plataforma de robô Arduino + Raspberry Pi
- Robô usando Raspberry Pi e Bridge Shield
- Robô da caixa de CD do Raspberry Pi
- Robô controlado por Wi-Fi usando Raspberry Pi
- Como construir um programa de manutenção elétrica
- Como construir um roteiro de produto IoT
- Como Construir Sauron, o Senhor dos Robôs
- Como criar um programa de manutenção elétrica