


Projeto de circuito do módulo de energia flyback para leitor RFID
A tecnologia de fonte de alimentação comutada testemunhou um desenvolvimento em direção à miniatura, alta frequência e alta eficiência com o desenvolvimento de chips altamente integrados nos últimos anos. Chips de controle altamente integrados simplificam os componentes periféricos necessários, pois é relativamente fácil projetar uma fonte de alimentação comutadora, dependendo do software de projeto. No entanto, o problema da alta integração leva a baixa liberdade de design, baixa disponibilidade de chips e baixo preço. O software de design desenvolvido por cada fabricante é apenas capaz de simular alguns tipos de chips peculiares. Na aplicação prática, é crucial projetar uma fonte de alimentação comutada compatível com as demandas do produto com excelentes condições de operação. Com base no requisito do módulo de energia para RFID, um interruptor de energia é projetado com uma tensão de 220VAC a 0,5VDC e uma dimensão de 88mm x 70mm. Como a corrente de funcionamento está próxima de 1,5 A no processo de leitura de tags, a corrente de saída máxima da potência do interruptor projetada é definida como 3 A.
No projeto de miniatura com potência de saída relativamente baixa, de acordo com a teoria de Erickson RW, a disponibilidade do interruptor de potência do interruptor flyback que é 0,385 é superior a 0,353 que usa o tipo de choque normal, ponte completa e meia ponte. Portanto, a estrutura do conversor flyback é selecionada. Levando em consideração as vantagens do design de feedback e do controlador de modo atual, o chip de controle PWM de modo atual UC3842 é selecionado.
Na alimentação do switch aplicando o chip UC3842, o design do circuito periférico é relativamente fácil. A estrutura do chip de controle PWM do modo atual elimina o pólo duplo trazido pela indutância no loop para simplificar efetivamente o design do loop de feedback. O estilo de feedback do terminal de saída é aplicado consistindo em tubo de estabilovolt TL431 e optoacoplador. No projeto baseado no UC3842, os projetistas tendem a projetar independentemente cada módulo na estrutura flyback, enfatizando o projeto do circuito adjacente e do circuito de realimentação, com outros projetos de circuito negligenciados. Por exemplo, de acordo com o teorema do elemento extra do Dr. Middlebrook, a impedância de entrada do filtro de entrada deve ser muito menor que a impedância de entrada do conversor. Caso contrário, possivelmente ocorre flutuação no circuito. Este projeto discute cuidadosamente o projeto do circuito adjacente, como o projeto do circuito do filtro de entrada, a compensação da inclinação e o projeto do circuito de aterramento. O esquema de design é determinado por meio da simulação do Sabre e sua compatibilidade com os requisitos e estabilidade por meio de depuração com RFID.
Teoria Básica da Potência do Comutador Flyback
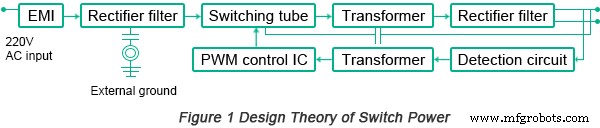
A teoria básica do projeto de comutação de energia é transformar VAC em VDC para a fonte de alimentação do chip IC, mudando DC para HFAC, que então muda para saída DC. O feedback estabiliza a tensão de saída da amostra DC de saída e do interruptor de controle IC de entrada. A teoria da alimentação do interruptor é ilustrada na Figura 1.
A estrutura de circuito fechado duplo do modo atual é aplicada no conversor de controle da potência do interruptor flyback. A característica do conversor flyback reside no fato de que, na condição fechada do tubo de comutação, a energia da indutância dentro das bobinas de um lado do transformador fornece energia para o portador através do diodo retificador, enquanto na condição aberta do tubo de comutação, a energia é armazenada dentro a bobina do transformador e a saída é fornecida pela energia armazenada dentro do capacitor de saída. O diagrama esquemático do conversor flyback é ilustrado na Figura 2.
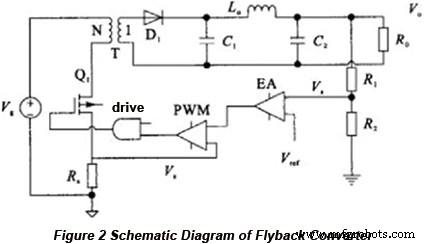
Quando a tensão detectada pelos resistores de detecção de saída R1 e R2 é menor que a tensão de referência Vref , o erro aumenta através do amplificador de erro com o tubo de comutação Q1 abrir. A indutância primária e a corrente do transformador aumentam pela inclinação de (Vg - Vligado )/ Lm . Resistor de amostragem Rs altera a indutância primária e a corrente em tensão de amostragem. Com base na comparação entre a tensão de amostragem no resistor de amostragem Rs e tensão de erro, quando a tensão no resistor de amostragem Rs sobe para o valor que é maior que a tensão de erro, o nível baixo será emitido e o tubo de comutação é fechado até a chegada do próximo clock. A potência de comutação flyback não precisa de indutor de potência de saída e o indutor do transformador pode ser aplicado diretamente para potência que apresenta uma estrutura topológica simples. O circuito de controle depende principalmente do chip PWM do modo atual UC3842 e do circuito periférico.
Chip PWM de modo atual UC3842
A CPU de controle aplicada neste projeto é o chip PWM UC3842 no modo de frequência e corrente fixas, integrando componentes de controle cruciais como oscilador, amplificador de erro, comparador PWM e trigger SR. Este chip apresenta a funcionalidade de proteção contra subtensão e sobrecorrente com um modo de saída de totem, frequência de trabalho de 500kHz, corrente de partida inferior a 1mA e corrente máxima de saída de 1A.
As funções dos pinos são diferentes umas das outras. O pino 7 é para fonte de alimentação. Quando a tensão é superior ao limite de início lento de 16V, o gatilho Schmitt produz um nível alto. O regulador de tensão fornece tensão de referência de 5V ao pino 8 e quando a tensão é inferior a 10V, o gatilho Schmitt emite baixo nível com subtensão bloqueada. O tubo de estabilização interno limita a tensão máxima de entrada dentro de 36V. A energia é fornecida a Ct pelo pino 4 através do circuito RC externo e pelo pino 8 através do resistor Rt e Ct determina a frequência do oscilador através da fonte de corrente interna que gera eletricidade. O pino 2 é a entrada inversora do amplificador de erro enquanto o pino 1 é a saída do amplificador de erro para fornecer compensação. O pino 3 é o pino de detecção de corrente, determinando o ciclo de trabalho através da saída do amplificador de erro e quando a tensão do pino 3 é maior que 1V, o fluxo de corrente é fechado. O pino 6 fornece a saída do modo totem com a corrente máxima de trabalho de 1A, acelerando o fechamento do tubo de comutação.
Projeto do Controle de Energia do Interruptor Flyback
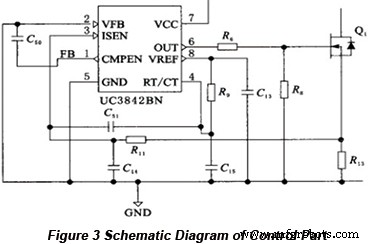
O diagrama esquemático da parte de controle é exibido na Figura 3 abaixo. A parte de controle do conversor flyback é principalmente integrada dentro do chip UC3842 e apenas alguns componentes externos podem implementar a função de controle necessária. O módulo de função de controle principal inclui circuito de partida, design de frequência, circuito de proteção, circuito de acionamento e compensação de inclinação.
• Circuito de partida e projeto de frequência
O circuito de partida fornece tensão de partida do pino 7 de mais de 16V. Quando o sistema é iniciado, a energia é fornecida ao pino 7 pelo enrolamento auxiliar. A frequência de trabalho deste sistema é determinada pelo capacitor de temporização e resistor entre o pino 8 e o pino 4. A tensão de referência de 5V do pino 8 fornece energia ao capacitor C15 através do resistor R9 . Capacitor C15 em seguida, gera onda dente de serra através de fonte de corrente interna gerando eletricidade cujo intervalo de tempo determina o tempo morto de saída do chip PWM. Para garantir o desempenho, o tempo morto deve ser menor que o período de oscilação em 5%. Com base no diagrama de sequência de tempo, pode-se obter que C15 é 3.3nF e frequência de trabalho 47kHz. De acordo com a fórmula fosc =1,7/(Rreferência x C15 ), o valor de R9 é 11kHz.
• Circuito de rebatimento atual
O circuito foldback de corrente do chip transforma a corrente do indutor na borda primária na tensão de saída do amplificador de tensão e erro implementado pelo comparador PWM através do resistor de detecção de sobrecorrente. Quando a tensão do pino 3 é superior a 1V, a saída é interrompida. A corrente de pico do indutor deve ser 1A e o valor do resistor de detecção de corrente R13 deve ser 1Ω. Para evitar o desligamento por erro conduzido pelo pico de corrente do indutor da borda primária do transformador, R11 e C14 são acessados para filtrar o pico e a corrente de pico é de aproximadamente centenas de nanossegundos. Na condição em que R11 deve ser 1k e C14 500pF, constante de tempo τ =RC =500ns.
• Circuito de condução do tubo MOS
O circuito de condução do tubo MOS é responsável pela excelente forma de onda do PWM, especialmente a borda de queda. A conexão serial entre o pino de saída 6 e o resistor em série da grade R6 diminuirá a flutuação parasita de alta frequência causada pela capacitância de entrada do tubo MOS e qualquer indutância de chumbo serial no circuito. Para garantir a forma de onda PWM do interruptor de tubo MOS, o valor de R6 é sempre pequeno na faixa de dezenas a vinte ohms. O valor de R8 é suposto ser 15kΩ como resistor de sangria de grade de tubo MOS.
• Compensação de inclinação
No controle do modo de corrente de pico, o valor de pico da corrente do indutor é constantemente ajustado enquanto o valor médio da corrente do indutor não é. A mudança do ciclo de trabalho irá alterar a corrente média e o anel interno de controle de corrente de pico garante o valor de pico da corrente do indutor, mas não consegue controlar o valor médio correto da corrente do indutor compatível com a tensão de saída, levando à mudança constante da tensão de saída. Quando o ciclo de trabalho for superior a 50%, a flutuação da corrente do indutor irá gerar oscilação. Neste projeto, a compensação de inclinação é necessária. A aplicação da compensação de inclinação superior refere-se a uma pilha de tensão de inclinação positiva em sinais de amostra atuais. A compensação capacitiva é aplicada neste projeto com um C51 de 100pF adicionados entre o pino 3 e o pino 4 e o sinal de oscilação do oscilador fornece energia para C51 e pino 3 através do capacitor. Com este tipo de compensação de inclinação, a capacitância é relativamente pequena com uma classificação de pF para evitar atrair a corrente do oscilador e gerar uma tensão negativa muito grande no pino 3.
Projeto de Circuito Periférico de Alimentação do Comutador Flyback
• Projeto de circuito para EMI e filtro retificador
Para filtrar a interferência da rede elétrica de alta frequência para os dispositivos e a influência do interruptor de alta frequência para a rede elétrica, o circuito do filtro EMI deve ser acessado pela classificação de entrada. O diagrama de circuito da onda de filtro EMI comum é mostrado na Figura 4.
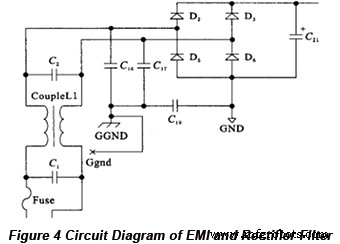
C1 está conectado na porta de entrada da rede elétrica enquanto C2 é com porta de entrada do dispositivo para eliminar a interferência do modo diferencial. L compartilha a mesma direção com o estrangulamento de modo comum para filtrar a interferência de modo comum enquanto C16 e C17 são conectados com terra para filtrar a interferência de modo comum.
A corrente de fuga de C16 e C17 é calculado de acordo com a fórmula: . Para dois capacitores idênticos, a amplitude da corrente de fuga deve estar de acordo com a fórmula:
. Para dois capacitores idênticos, a amplitude da corrente de fuga deve estar de acordo com a fórmula: , em que f se refere à frequência da rede elétrica com o valor de 50Hz, C se refere à capacitância geral de 4400pF ao terra, e V refere-se à tensão de terra de 110V. Portanto, o valor de Ivazamento é 0,15mA que é compatível com a corrente alternada com o valor válido de 220VAC após EMI compatível com o padrão de segurança. A amplitude é
, em que f se refere à frequência da rede elétrica com o valor de 50Hz, C se refere à capacitância geral de 4400pF ao terra, e V refere-se à tensão de terra de 110V. Portanto, o valor de Ivazamento é 0,15mA que é compatível com a corrente alternada com o valor válido de 220VAC após EMI compatível com o padrão de segurança. A amplitude é  enquanto o DCV de saída é
enquanto o DCV de saída é  . A tensão de ruptura reversa do diodo deve atender ao seguinte requisito:
. A tensão de ruptura reversa do diodo deve atender ao seguinte requisito: . C refere-se à capacitância do filtro enquanto RL refere-se a carga. Quanto maior a constante de tempo RL C é e quanto mais suave for a capacitância, melhor será o efeito do filtro. O diodo ln4007 com alta tensão suportável é acionado.
. C refere-se à capacitância do filtro enquanto RL refere-se a carga. Quanto maior a constante de tempo RL C é e quanto mais suave for a capacitância, melhor será o efeito do filtro. O diodo ln4007 com alta tensão suportável é acionado.
• Oscilação trazida pela impedância de saída do filtro e impedância de entrada do conversor
A incompatibilidade entre a impedância de entrada do conversor e a impedância de saída do filtro possivelmente também leva à oscilação. A impedância de entrada do conversor do sistema de loop pode ser considerada como um resistor negativo (  ). O filtro é um filtro LC e a função de transferência pode ser obtida com ESR de indutância e capacitância.
). O filtro é um filtro LC e a função de transferência pode ser obtida com ESR de indutância e capacitância.

A impedância de entrada do conversor de oscilação constante do sistema deve estar de acordo com a fórmula: .
.
Portanto, somente se a impedância de entrada do conversor de malha for menor que a impedância de saída da oscilação do filtro calculada, o coeficiente de amortecimento da função de transferência é um valor positivo que se tornará constante para reduzir a oscilação. Caso contrário, o circuito irá flutuar.
• Projeto de circuito snubber
Para evitar que o tubo de frequência seja destruído como resultado da sobretensão de desligamento, o circuito de amortecimento RCD da borda primária deve ser montado no transformador. A porta de saída quebra o diodo de saída para evitar avarias graves com a adição do circuito snubber de saída, que é ilustrado na Figura 5.
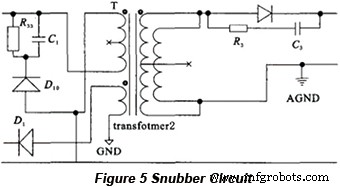
No processo de ruptura do tubo MOS, a corrente da borda primária id fornece energia para a capacitância da fonte de fuga parasita através da fonte de fuga da borda primária do transformador. Essa tensão de alta frequência pode fazer com que a tensão no tubo do interruptor exceda a tensão suportável e quebre o tubo do interruptor, de modo que um circuito snubber RCD é adicionado para fornecer um caminho de derivação de tensão. O diodo de recuperação rápida FR107 com alta tensão suportável é acionado, resistor RCD 5kΩ e capacitância 3300pF.
Quando a entrada está aberta com o tubo MOS aberto, a tensão adicionada no diodo schottky de saída (  ) e a quebra do tubo MOS leva à quebra do diodo. Com o circuito RC snubber adicionado, a tensão no diodo schottky VD =VO + EuO x R3 . O tempo aberto de 2SK792 do tubo MOS é 55ns, a tensão suportável reversa do diodo schottky SB540 é 60V, saída VO é 5V e a corrente máxima é 3A. Portanto, a resistência equivalente do circuito de amortecimento máximo é 18,33Ω e (
) e a quebra do tubo MOS leva à quebra do diodo. Com o circuito RC snubber adicionado, a tensão no diodo schottky VD =VO + EuO x R3 . O tempo aberto de 2SK792 do tubo MOS é 55ns, a tensão suportável reversa do diodo schottky SB540 é 60V, saída VO é 5V e a corrente máxima é 3A. Portanto, a resistência equivalente do circuito de amortecimento máximo é 18,33Ω e (  ). Quando R é 18Ω e C é 560pF, a resistência serial equivalente é 18,06Ω.
). Quando R é 18Ω e C é 560pF, a resistência serial equivalente é 18,06Ω.
• Projeto do circuito de saída
A retificação é implementada pela parte de saída através do diodo schottky e a filtragem aplica capacitor com baixo ESR com capacitor equivalente ESR reduzindo a saída, que é mostrado na Figura 6.
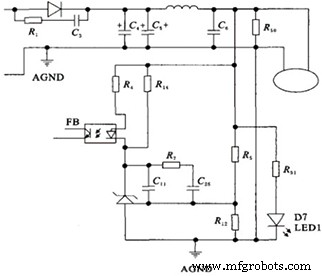
Os circuitos de amostragem de saída são obtidos através de R5 e R12 tensão diferencial e o valor de R12 é determinado com referência à corrente do terminal de saída TL431 que é 1,5μA. Para evitar que a corrente influencie a relação de tensão diferencial e o ruído, a corrente através do resistor R12 deve ser mais de 100 vezes a corrente de entrada TL431. Rbaixo<2,5/150μA=16,6kΩ. Como a corrente de trabalho do TL431 está na faixa de 1mA a 100mA, quando a corrente de R5 é quase 0, a corrente de 1mA é fornecida ao TL431 por R14 (R14
Com base nas curvas de recurso do triodo no PC817B, quando a corrente direta do transistor é de aproximadamente 7mA, o valor de IC é 7mA também e a tensão do emissor é linear dentro de uma categoria relativamente ampla com uc3842comp linear. O CTR no PC817B está na faixa de 1,3 a 2,6. Quando o valor de IC é 7mA, com a pior situação considerada, o valor de CTR é 1,3. A corrente máxima que flui através do LED deve ser If =IC /1,3 =5,38mA, R4 <(5 - Uka - Uf )/5,38mA =(5 - 1,15 - 2,5)/5,38mA =250Ω. A corrente máxima que o TL431 pode suportar é 150mA enquanto a corrente máxima que o PC817 pode suportar é 50mA. Portanto, a corrente máxima R4 fornece é 50mA com R4>(5 - 1,15 - 2,5)/50mA =27Ω. Portanto, o intervalo de R4 está entre 27Ω e 250Ω com o valor de 150Ω selecionado.
• Projeto do circuito de aterramento
O transformador é aplicado para isolador de aterramento entre aterramento frio e quente na alimentação do interruptor. O terra quente na borda primária do transformador pode ser formado em loop através da rede elétrica e o transformador secundário refere-se ao loop formado por terra fria e terra. O capacitor de segurança Y é captado por C16 e C17 para conectar a linha zero e a linha de disparo ao aterramento do quadro para filtrar a interferência de modo comum. Capacitor C18 entre a terra quente e a terra fria transforma o ruído no lado secundário do transformador no curto-circuito primário para reduzir a onda eletromagnética de radiação.
Recursos úteis
• Uma introdução abrangente de IoT baseada em RFID
• Projeto de PCB de alta potência em ambiente de alta temperatura
• Como eliminar defeitos de aterramento da fonte de alimentação de controle com base na redução de isolamento no projeto de PCB
• Discussão sobre Potência e Aterramento na Compatibilidade Eletromagnética de PCB
• Como Analisar e Proibir Impedância de Potência de PCB de Alta Velocidade
• PCBs com Suporte de Alumínio:A Solução para Aplicações de Alta Potência e Tolerância Estreita
• Serviço completo de fabricação de PCB da PCBCart - Várias opções de valor agregado
• Serviço avançado de montagem de PCB da PCBCart - Comece a partir de 1 peça
Tecnologia industrial
- Circuito retificador / filtro
- Projeto de circuito seguro
- Sistemas de energia monofásicos
- Calculando o fator de potência
- Placas de Circuito Impresso para Instrumentação Médica
- Diretrizes para Projeto de RF e Microondas
- Projeto para fabricação de PCBs
- Retrocessos e soluções no projeto de PCB de RF
- Projeto de PCB para circuito de radiofrequência e compatibilidade eletromagnética
- 5 dicas para o projeto de circuitos automotivos derrotar a EMI