


Lego Shooter automatizado
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 |
Ferramentas e máquinas necessárias
| |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
Este projeto visa fazer com que os Canhões de Lego disparem automaticamente. Gosto de brincar de legos e gosto de usar Arduinos, então decidi fazer este projeto no meu tempo livre. Os servo motores, com suas buzinas acopladas, giram acertando a alavanca e atirando no canhão. Um ótimo primeiro, segundo ou terceiro projeto para iniciantes!
Este é um guia passo a passo de como fazer.
Etapa 1:o hardware
Etapa 1 Parte 1: Hardware Básico
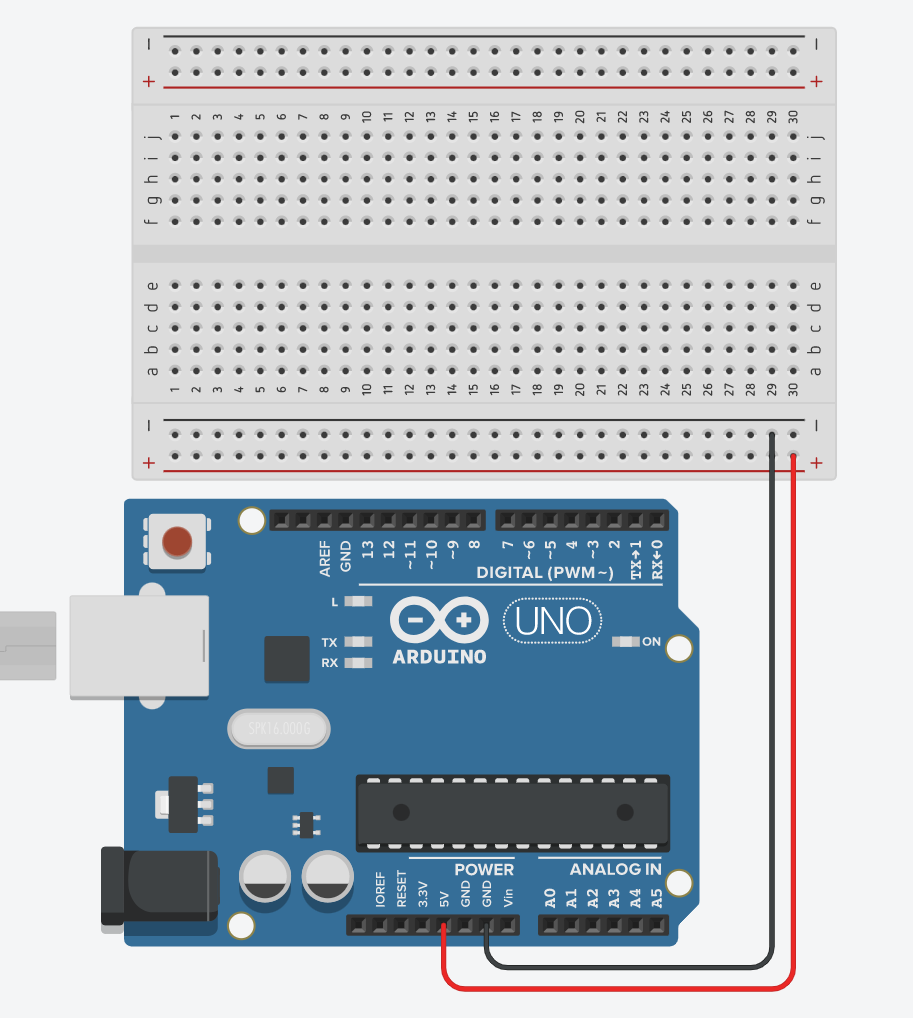
Comece com 5 V indo para a linha carregada positivamente e GRND indo para a linha carregada negativamente. Vai ficar assim -
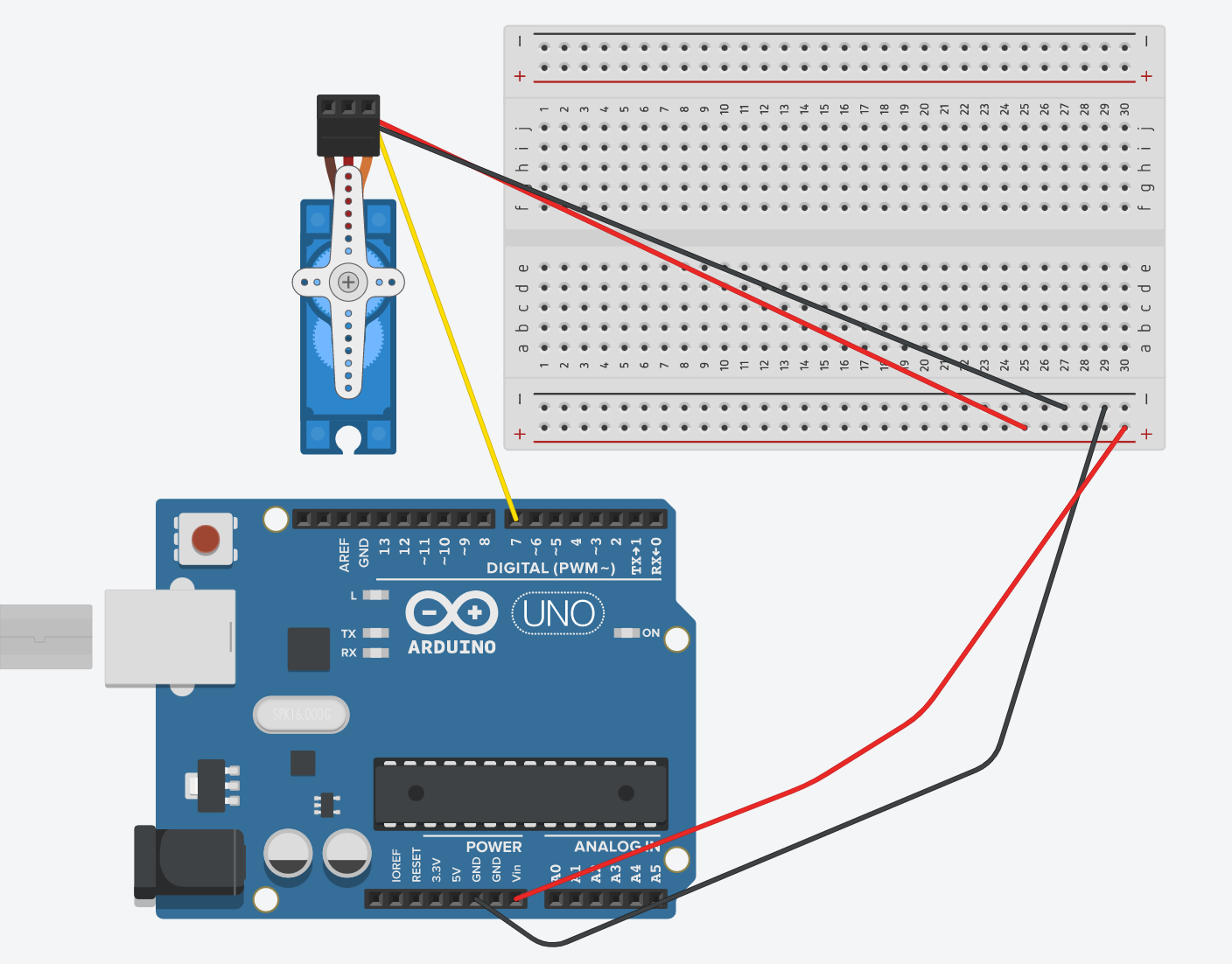
Etapa 1 Parte 2:Conectando o Servo nº 1
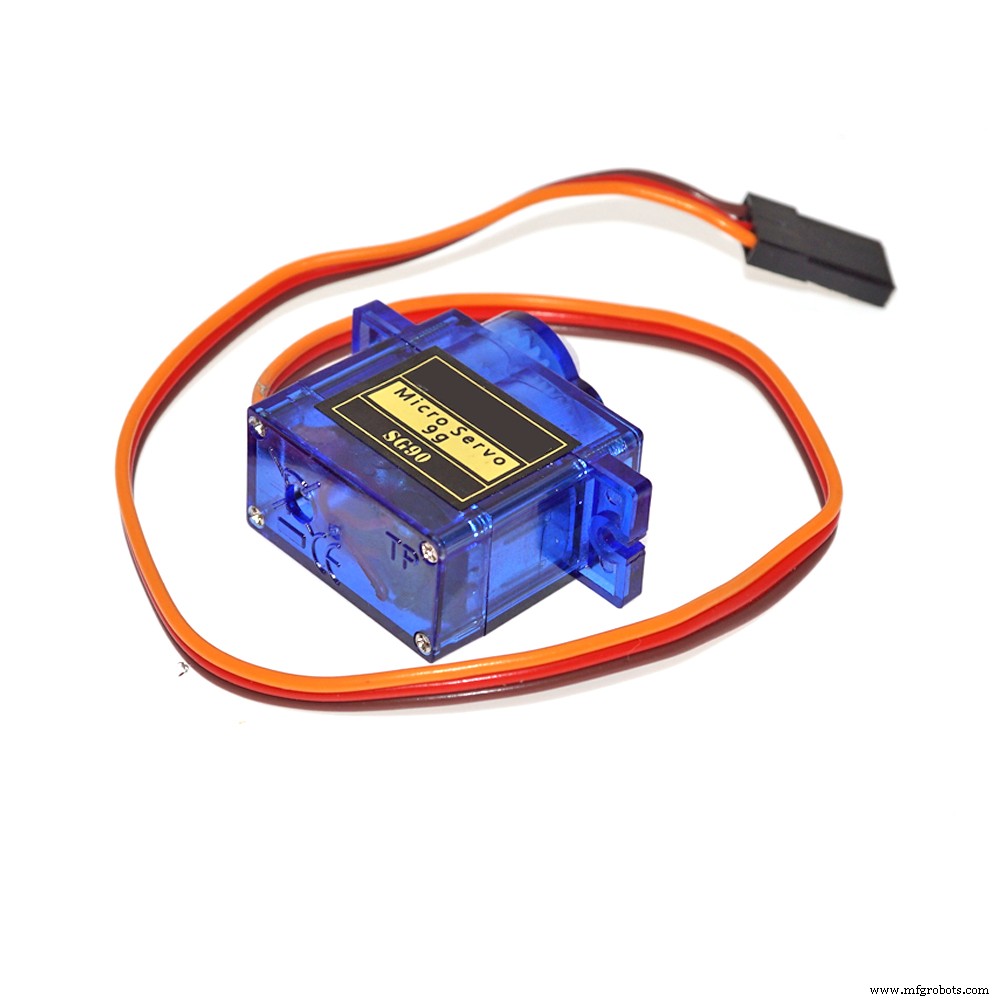
O Servo tem três fios - o laranja / amarelo (sinal) ocupará um slot no DIGITAL (PWM ~), o vermelho (Power) irá para VIN (que é qualquer pino na linha positiva), e o o fio preto / marrom (GRND) irá para a fileira carregada negativamente conectada ao pino GRND no Uno. O pino digital que usei para meu primeiro servo é 7. Aqui está como o esquema fica quando o primeiro servo é conectado -
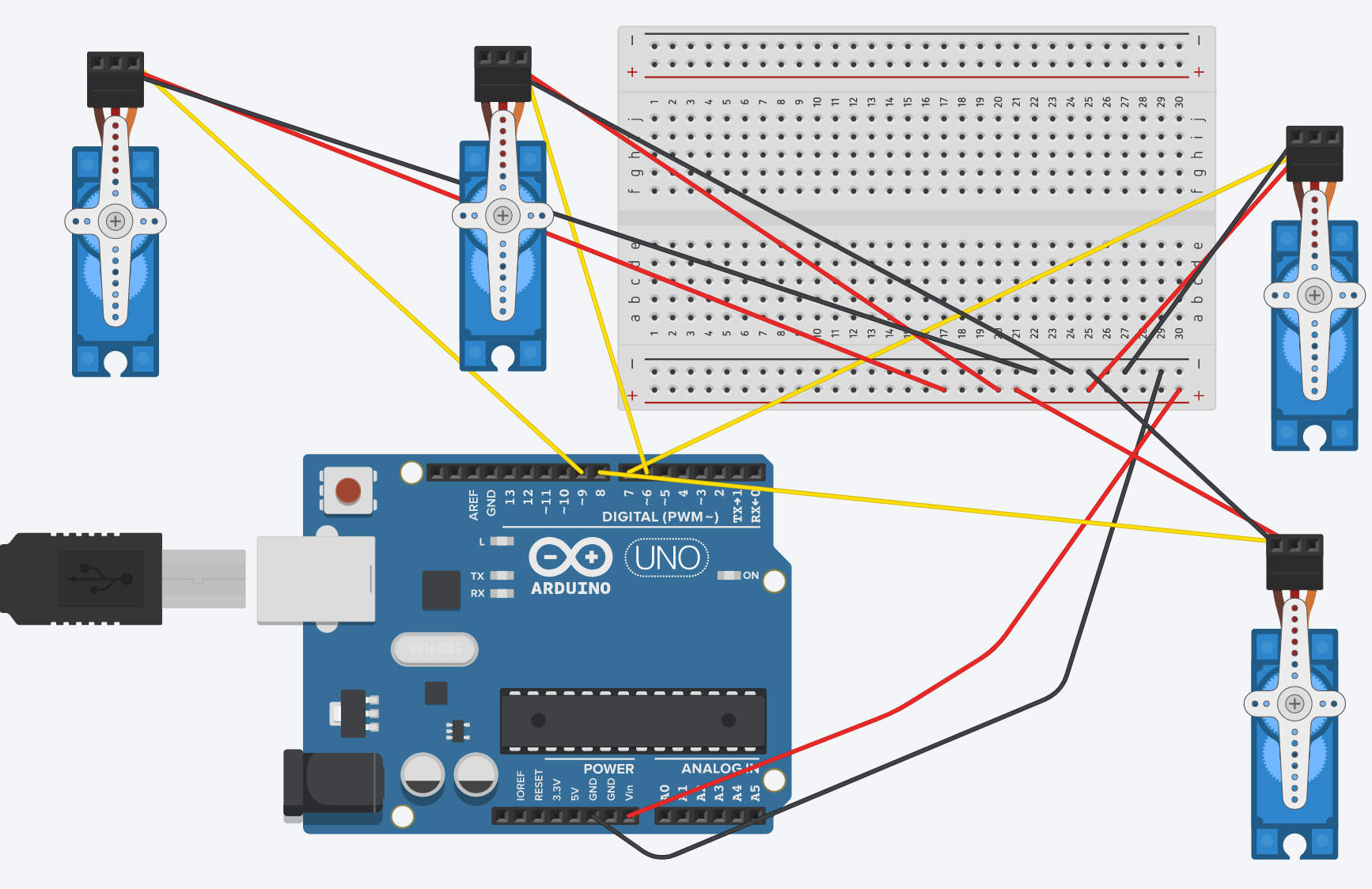
Etapa 1 Parte 3:Fiação do restante dos Servos
Depois de pegar o jeito com os servos, o resto deve ser uma brisa. Uma coisa a se notar, entretanto - você deve manter a consistência com os pinos digitais que você anexou ao seu servo no código.
Por exemplo, o código (que pode ser encontrado na parte inferior da página), afirma-
secondCannon.attach (8); Portanto, o segundo Servo deve ser conectado ao pino digital 8.
Da mesma forma, o terceiro Servo deve ser conectado ao pino digital 6, e o quarto deve ser conectado ao nono pino digital.
No entanto, eles podem ser alterados para que estejam na ordem que você quiser. Apenas certifique-se de alterar o hardware e o software para manter a consistência, caso contrário, o código não funcionará.
Para executar com o código fornecido na parte inferior, é assim que o esquema deve ser semelhante -

Parabéns! Você concluiu oficialmente a parte de hardware deste projeto.
Etapa 2:o software
Agora, copie e cole o código na parte inferior da página em um esboço do Arduino e faça o upload. Certifique-se de ter a biblioteca Servo antes de enviar o código, caso contrário, ele não funcionará! Abaixo está um guia passo a passo que explica o código e o que ele significa ao executar o programa.
#include // Incluindo a biblioteca para o ServosServo firstCannon; // Definindo o primeiro canhão como um ServoServo secondCannon; // Definindo o Segundo Canhão como um ServoServo thirdCannon; // Definindo o Terceiro Canhão como um ServoServo fourCannon; // Definindo o quarto canhão como um servo Este código configura o
Servo.h biblioteca, que terá um papel fundamental no código. Isso pode ser mostrado pelas linhas a seguir, usando a biblioteca para definir quatro canhões como Servos, ou motores que podem ser girados em 180 graus. void setup () {// Código de configuração, ou código que é executado apenas uma vez Serial.begin (9600); // Inicia a comunicação serial Serial.println ("Defenda os Clones! Configure as defesas!") // Imprime algo no Monitor Serial firstCannon.attach (7); // Anexe o pino digital 7 ao primeiro canhão secondCannon.attach (8); // Anexe o pino digital 8 ao segundo canhão thirdCannon.attach (6); // Anexe o pino digital 6 ao terceiro canhão fourCannon.attach (9); // Anexe o pino digital 9 ao quarto canhão} A
configuração de void () o código é usado em quase todos os projetos do Arduino, e é um código que só é executado uma vez. Neste caso, estamos iniciando a comunicação serial de nova linha em 9600 baud. Então, estamos imprimindo coisas no Monitor Serial. Para programar os Servos, temos que conectar seus nomes aos respectivos pinos digitais. Este é o objetivo do .attach () pedaço de código. void loop () {// Código de loop, ou código que é executado uma quantidade infinita de vezes Serial.println ("Beginning firing sequence") // Imprime algo no Serial Monitor firstCannon.write (180); // Desvia o primeiro servo 180 graus, disparando o primeiro retardo do canhão (100); // Aguarde 1/10 de segundo firstCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo secondCannon.write (180); // Desviar o segundo servo 180 graus, disparando o segundo atraso do canhão (100); // Aguarde 1/10 de segundo secondCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo thirdCannon.write (180); // Desvia o terceiro servo 180 graus, disparando o retardo do terceiro canhão (100); // Aguarde 1/10 de um segundo terceiroCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo fourCannon.write (180); // Desviar o primeiro quarto 180 graus, disparando o quarto canhão delay (100); // Aguarde 1/10 de um segundo fourCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo Serial.println ("Todos os canhões disparados"); Serial.println ("Preparar para recarregar"); atraso (10000); Serial.println ("Recarregamento concluído. Preparando para disparar novamente")} Esta é a parte final do código, usando o
void loop () função que permite que o código a seguir seja executado uma quantidade infinita de vezes. Em seguida, imprimimos no Serial Monitor que os canhões estão prestes a disparar. Os Servos para cada canhão devem girar 180 graus e, em seguida, girar de volta à posição original, um de cada vez. Depois disso, deve haver 10 segundos (tempo de recarga) até que o processo se repita novamente. Se você tiver qualquer outro problema ao enviar o código, pode comentar na seção de comentários e eu responderei o mais rápido possível. Se funcionar, vá para a próxima etapa.
Etapa 3:Instalação
A última etapa requer os canhões de lego e algumas fitas regulares antiquadas. O canhão de lego se parece com isto -

Execute o código. Veja para que lado o servo gira. Cole o servo no canhão de Lego de forma que sua trajetória o coloque em rota de colisão com a alavanca no topo do canhão na imagem acima.
Bom trabalho! Você terminou oficialmente este projeto. Como eu disse, comente na seção abaixo se tiver alguma dúvida.
Se você gostou deste projeto, confira estes links -
https://create.arduino.cc/projecthub/342600/basketball-hoop-with-buzzer-using-an-arduino-693bad?ref=user&ref_id=1536504&offset=1
https://create.arduino.cc/projecthub/ShreyanR/soundbox-826a56
Código
- Código de atirador de arma Lego
Código Lego Gun Shooter C / C ++
Cole isso no IDE do Arduino#include// Incluindo a biblioteca para o ServosServo firstCannon; // Definindo o primeiro canhão como um ServoServo secondCannon; // Definindo o Segundo Canhão como um ServoServo thirdCannon; // Definindo o Terceiro Canhão como um ServoServo fourCannon; // Definindo o Quarto Canhão como um Servovóide setup () {// Código de configuração, ou código que é executado apenas uma vez Serial.begin (9600); // Inicia a comunicação Serial Serial.println ("Defenda os Clones! Configure as defesas!") // Imprime algo no Monitor Serial firstCannon.attach (7); // Anexe o pino digital 7 ao primeiro canhão secondCannon.attach (8); // Anexe o pino digital 8 ao segundo canhão thirdCannon.attach (6); // Anexe o pino digital 6 ao terceiro canhão fourCannon.attach (9); // Anexe o pino digital 9 ao quarto canhão} void loop () {// Código de loop, ou código que é executado uma quantidade infinita de vezes Serial.println ("Iniciando a sequência de disparo") // Imprime algo no Monitor serial firstCannon. escrever (180); // Desvia o primeiro servo 180 graus, disparando o primeiro retardo do canhão (100); // Aguarde 1/10 de segundo firstCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo secondCannon.write (180); // Desviar o segundo servo 180 graus, disparando o segundo atraso do canhão (100); // Aguarde 1/10 de segundo secondCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo thirdCannon.write (180); // Desvia o terceiro servo 180 graus, disparando o retardo do terceiro canhão (100); // Aguarde 1/10 de um segundo terceiroCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo fourCannon.write (180); // Desviar o primeiro quarto 180 graus, disparando o quarto canhão delay (100); // Aguarde 1/10 de um segundo fourCannon.write (0); // Desviar o Servo de volta para a posição original em preparação para o atraso de recarregamento (1000); // Aguarde 1 segundo Serial.println ("Todos os canhões disparados"); Serial.println ("Preparar para recarregar"); atraso (10000); Serial.println ("Recarregamento concluído. Preparando para disparar novamente")}
Esquemas
Processo de manufatura