


Alimentador de animais de estimação com controle remoto
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
| ||||
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
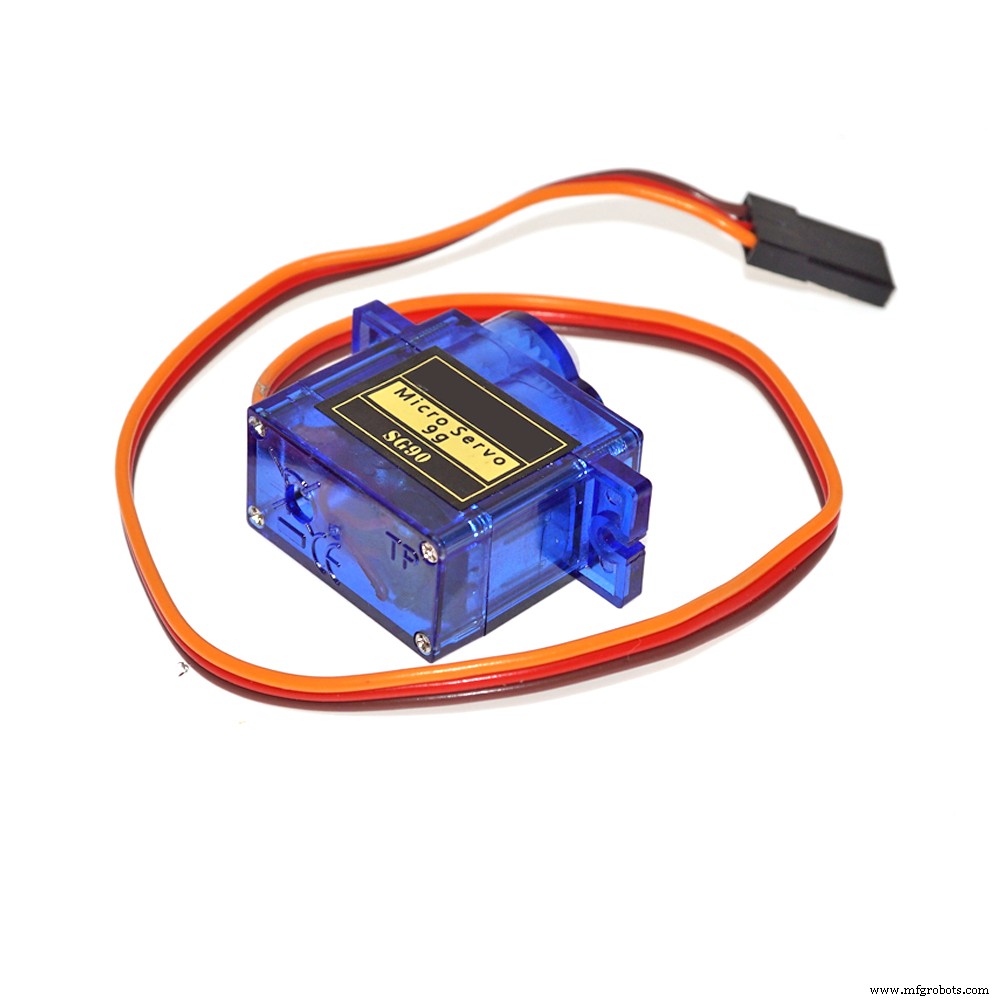
Com este projeto Arduino simples, você pode alimentar seu animal de estimação usando um controle remoto. Tudo o que você precisa é de uma placa Arduino Uno (ou similar), uma garrafa de plástico, um servo motor (não precisa ser muito potente), um controle remoto de TV, receptor IR (TS0P1738) e um pequeno pedaço de papelão.
Vamos começar!
Instalando a Biblioteca IR:
A primeira coisa que precisamos fazer na associação com o arduino é baixar a biblioteca IR.
Baixe a biblioteca IR no link abaixo e instale-a:https://github.com/z3t0/Arduino-IRremote
Se você não sabe como instalar uma biblioteca, siga o link abaixo:https://www.arduino.cc/en/guide/libraries
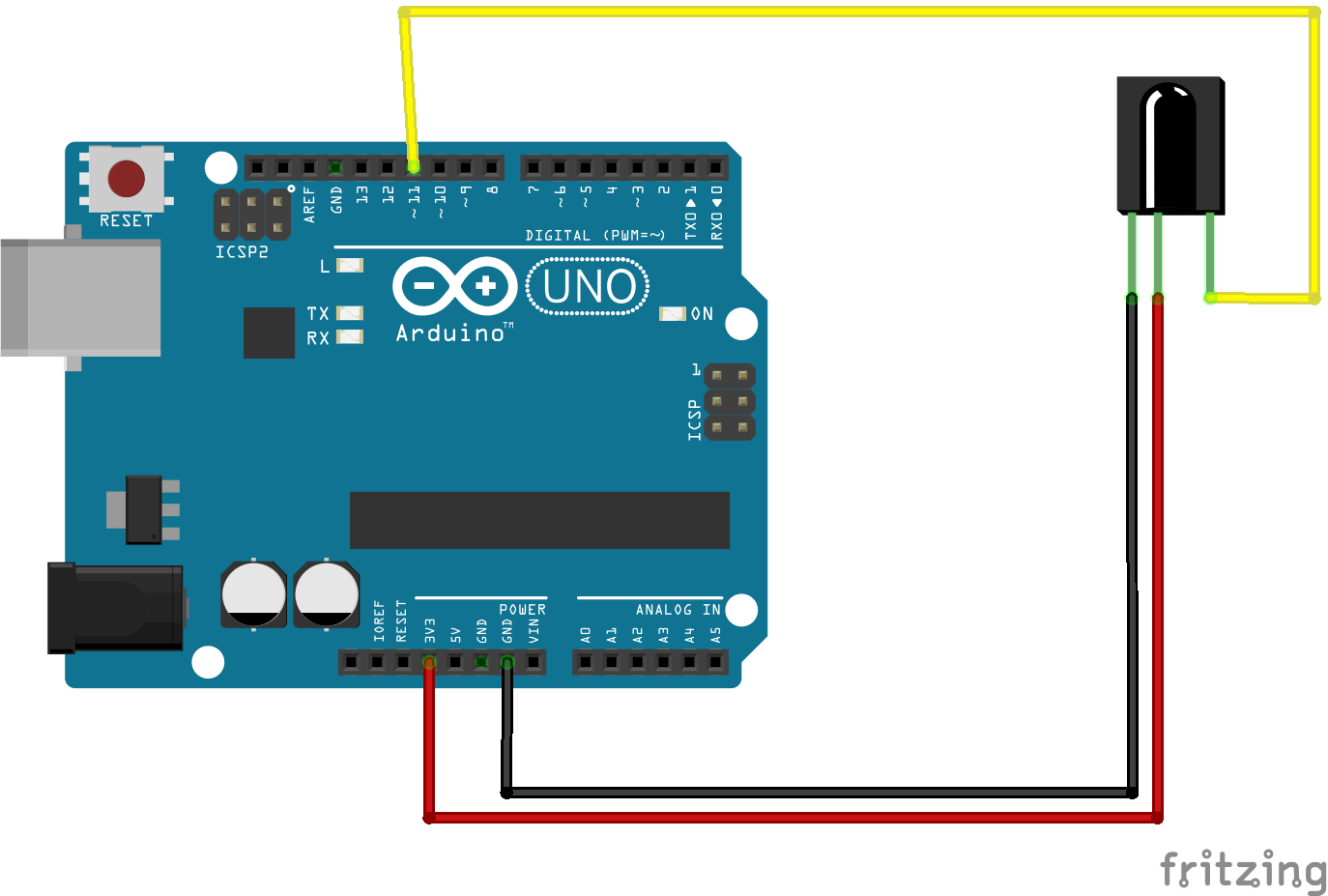
Decodificando sinais de IV:
Primeiro você precisa conectar as peças de acordo com o diagrama de circuito fornecido:
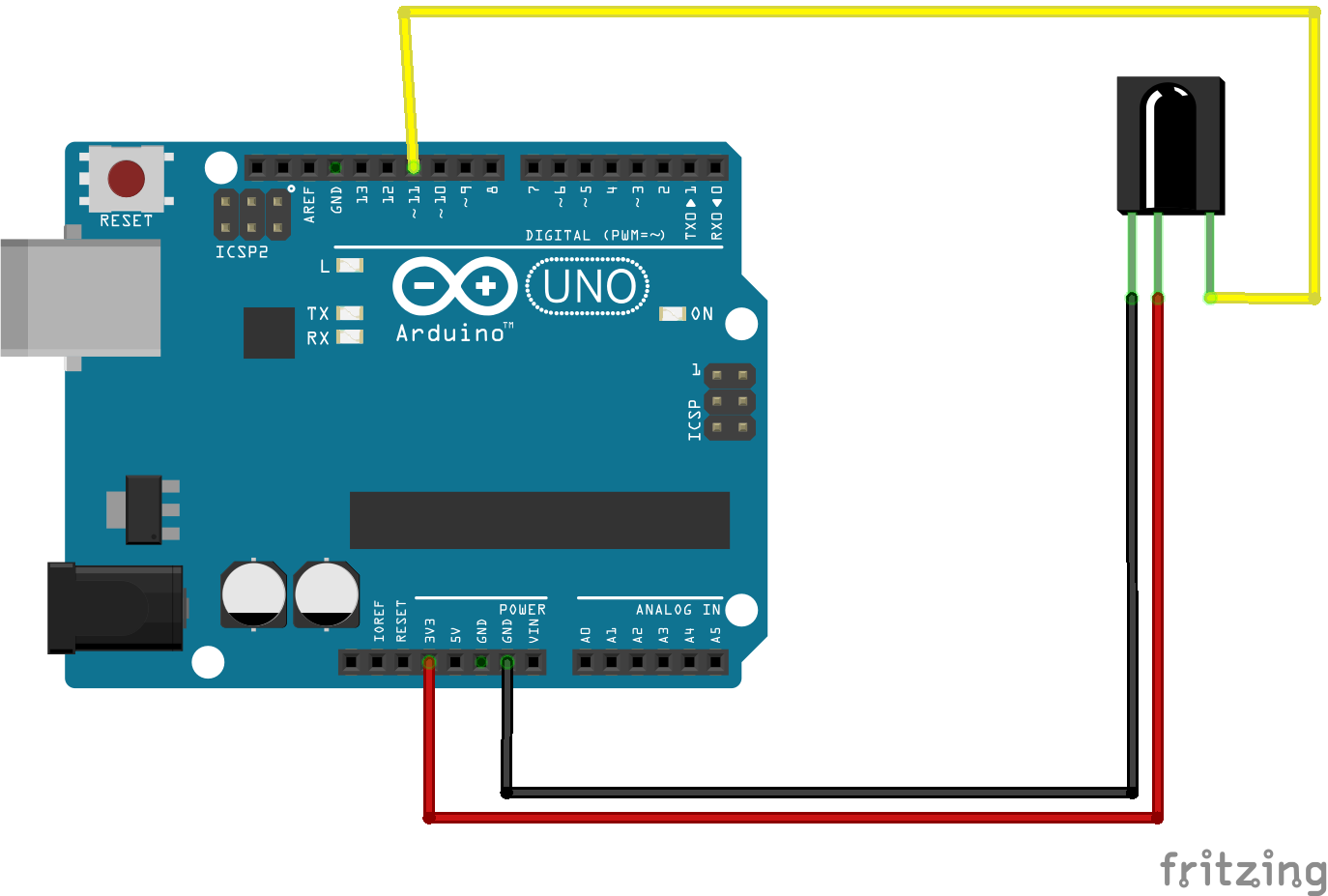
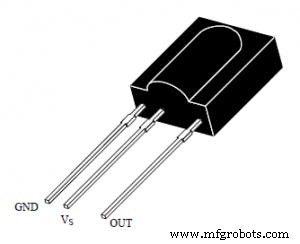
Você pode verificar o Pin do TSOP1738 abaixo:
Use o seguinte código para decodificar o controle remoto IR:
/ * Os pinos do sensor IR são anexados ao Arduino da seguinte forma:Pino 1 para Vout (pino 11 no Arduino) Pino 2 para GNDPin 3 para Vcc (+ 5v do Arduino) * / # inclui int IRpin =11; IRrecv irrecv (IRpin); resultados decodificar_resultados; configuração vazia () {Serial.begin (9600); irrecv.enableIRIn (); // Iniciar o receptor} void loop () {if (irrecv.decode (&results)) {Serial.println (results.value, DEC); // Imprime o Serial 'results.value' irrecv.resume (); // Receba o próximo valor}} - Abra o IDE do Arduino e faça o upload do código
- Abra o Serial Monitor
- Aponte seu controle remoto para o sensor e pressione cada botão
- Você pode ver números diferentes para cada botão
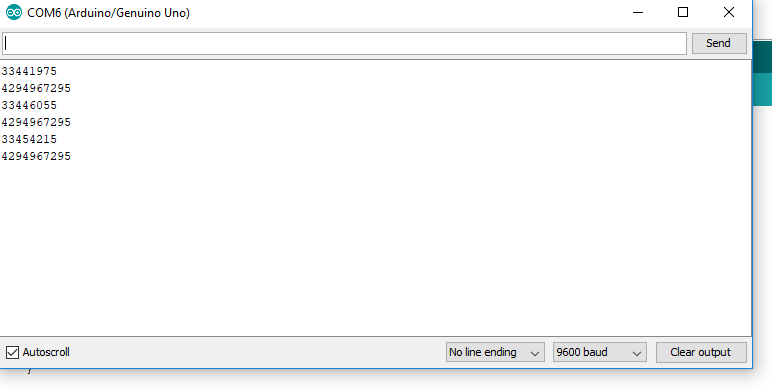
Considere dois botões quaisquer e anote os valores decodificados. No meu caso, escolhi o botão Liga / Desliga e o botão Modo.
Obtive os seguintes valores:
- Botão liga / desliga =33441975
- Botão Modo =33446055
Estaremos usando esses dois valores para controlar a rotação do servo motor. Você precisa adicionar esses dois valores no programa que é dado na próxima etapa:

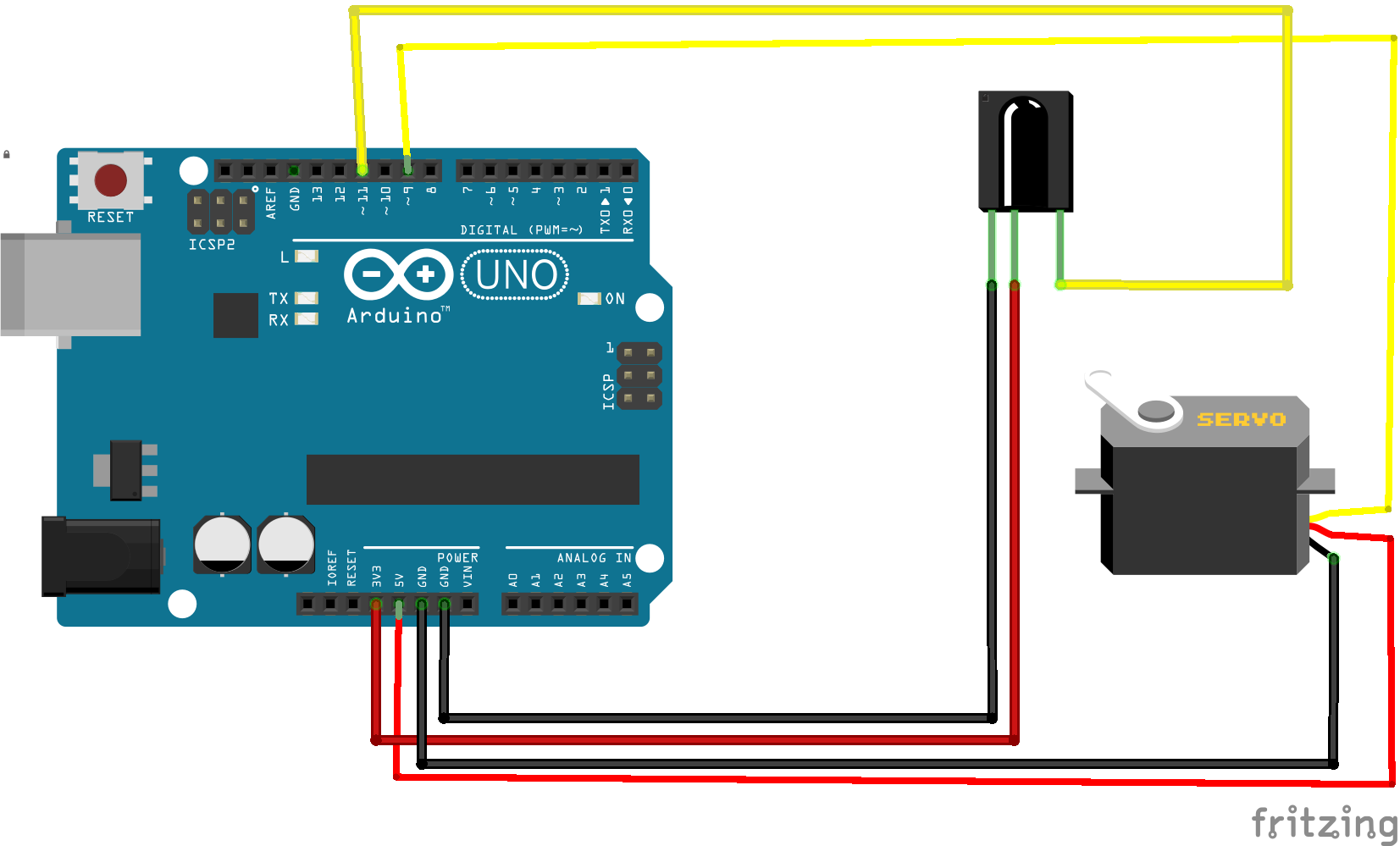
Vamos configurar o hardware final!
O circuito final!
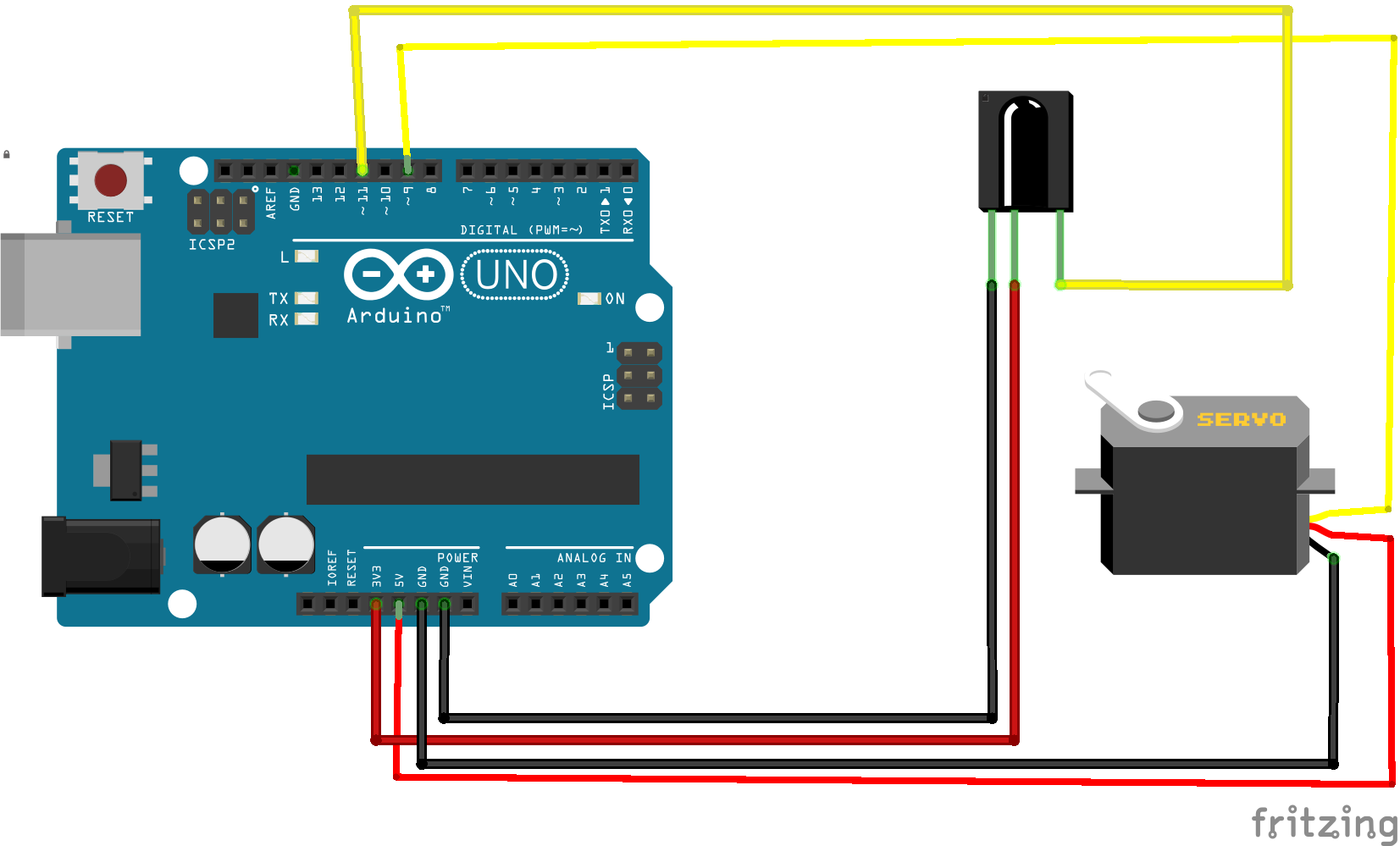
- Conecte o pino de sinal do servo ao pino # 9 no arduino
- conecte os pinos VCC e GND do servo a 5V VCC e GND no arduino
- O servo será colado em uma das extremidades da garrafa de plástico e girar um pedaço de papelão pequeno o suficiente para fechar a abertura da garrafa de forma que o alimento seja bloqueado.
- Se toda a configuração do hardware estiver conectada corretamente, você pode simplesmente compilar e enviar o seguinte esboço para o quadro.
#include #include int IRpin =11; // pino para o IR sensorIRrecv irrecv (IRpin); decode_results results; Servo myservo; void setup () {Serial.begin (9600); irrecv.enableIRIn (); // Inicie o receptor myservo.attach (9); // anexa o servo no pino 9 ao objeto servo} void loop () {if (irrecv.decode (&results)) {irrecv.resume (); // Receba o próximo valor} if (results.value ==33441975) // mude de acordo com o número do botão remoto IR {myservo.write (0); atraso (15); } if (results.value ==33446055) // mudar de acordo com o número do botão do controle remoto IR {myservo.write (30); atraso (15); }} Agora você pode controlar a abertura do dispensador de comedouro para animais de estimação com controle remoto por este projeto simples. :-)
Feliz fabricação!
Código
- Decode_IR
- IRremote_Servo_Control
Decode_IR Arduino
Use este código para decodificar IR remoto/ * Os pinos do sensor IR são anexados ao Arduino da seguinte forma:Pino 1 para Vout (pino 11 no Arduino) Pino 2 para GND Pino 3 para Vcc (+ 5v do Arduino) * / # incluirint IRpin =11; IRrecv irrecv (IRpin); resultados de decodificar_resultados; configuração de void () {Serial.begin (9600); irrecv.enableIRIn (); // Iniciar o receptor} void loop () {if (irrecv.decode (&results)) {Serial.println (results.value, DEC); // Imprime o Serial 'results.value' irrecv.resume (); // Receba o próximo valor}}
IRremote_Servo_Control Arduino
Adicione o valor decodificado de seu controle remoto neste código#include#include int IRpin =11; // pino para o IR sensorIRrecv irrecv (IRpin); decode_results results; Servo myservo; void setup () {Serial.begin (9600); irrecv.enableIRIn (); // Inicie o receptor myservo.attach (9); // anexa o servo no pino 9 ao objeto servo} void loop () {if (irrecv.decode (&results)) {irrecv.resume (); // Receba o próximo valor} if (results.value ==33441975) // mude de acordo com o número do botão remoto IR {myservo.write (0); atraso (15); } if (results.value ==33446055) // mudar de acordo com o número do botão do controle remoto IR {myservo.write (30); atraso (15); }}
Esquemas
Processo de manufatura
- Ventilador com temperatura controlada
- Aquaponia controlada com Raspberry Pi
- Monitoramento remoto do clima usando Raspberry Pi
- Controle remoto universal Raspberry Pi
- Botão AWS IoT controlado por movimento
- Monitor de frequência cardíaca remoto
- Raspberry Pi / Hologram SMS interruptor de alimentação CA controlado
- Robô controlado por Wi-Fi usando Raspberry Pi
- ROObockey:Robô de hóquei de rua com controle remoto e auxílio de mira
- O que é um alimentador de prensa?