


Contador RPM baseado em Arduino com um algoritmo novo e mais rápido
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
| |||
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
Este projeto é desenvolvido a partir de arranhão como uma tentativa de medir a RPM exata (Rotações por Minuto) valor de vários motores usando um único IR sensor, uma placa Arduino e um essencial ingrediente principal - um apontador laser (necessariamente vermelho).
Este projeto usa o fato de que o sensor IR também lê o baixo número de radiações IR emitidas pelo laser vermelho. No entanto, quando um laser azul / verde é usado, essas radiações infravermelhas ficam muito menores e a tensão de leitura analógica cai para aprox. 0
Quando uma lâmina do ventilador acoplada ao motor entra no caminho do feixe de laser, ele bloqueia o caminho e a leitura cai para 0. A lâmina do ventilador continua girando e sua posição muda com um fornecimento constante de energia. Uma mudança constante de caminho ocorre. Quando o caminho fica livre novamente, o feixe do apontador laser atinge o sensor novamente.
NOVO CÓDIGO BASEADO EM ALGORITMO DE SINGLE SHOT, PARA MEDIDAS ADAPTADAS DE MUDANÇA MAIS E MAIS RÁPIDAS:-
O código para este projeto que é desenvolvido por mim usa um algoritmo desenvolvido recentemente para este projeto. O o algoritmo é realmente único e foi criado para fazer medições em menos de 40 milissegundos e fornecer resultados precisos. Um recurso muito importante deste programa é que ele usa um método que chamo de Detecção de disparo único para Arduino. Ele calcula o RPM do motor toda vez que a pá do ventilador cria uma obstrução no caminho do feixe de laser. Isso ocorre porque a obstrução do caminho do feixe de laser marca uma volta completa de 1 / n para n número de lâminas no ventilador. Então, o programa é muito sensível para alterações por minuto no RPM ( até 2 casas decimais) em todos 1 / n th revolução de o fã lâmina novamente onde n é o número de lâminas de o fã. Portanto, este algoritmo de detecção de disparo único fornece extremamente preciso valor de RPM e maior sensibilidade às mudanças nas medições.
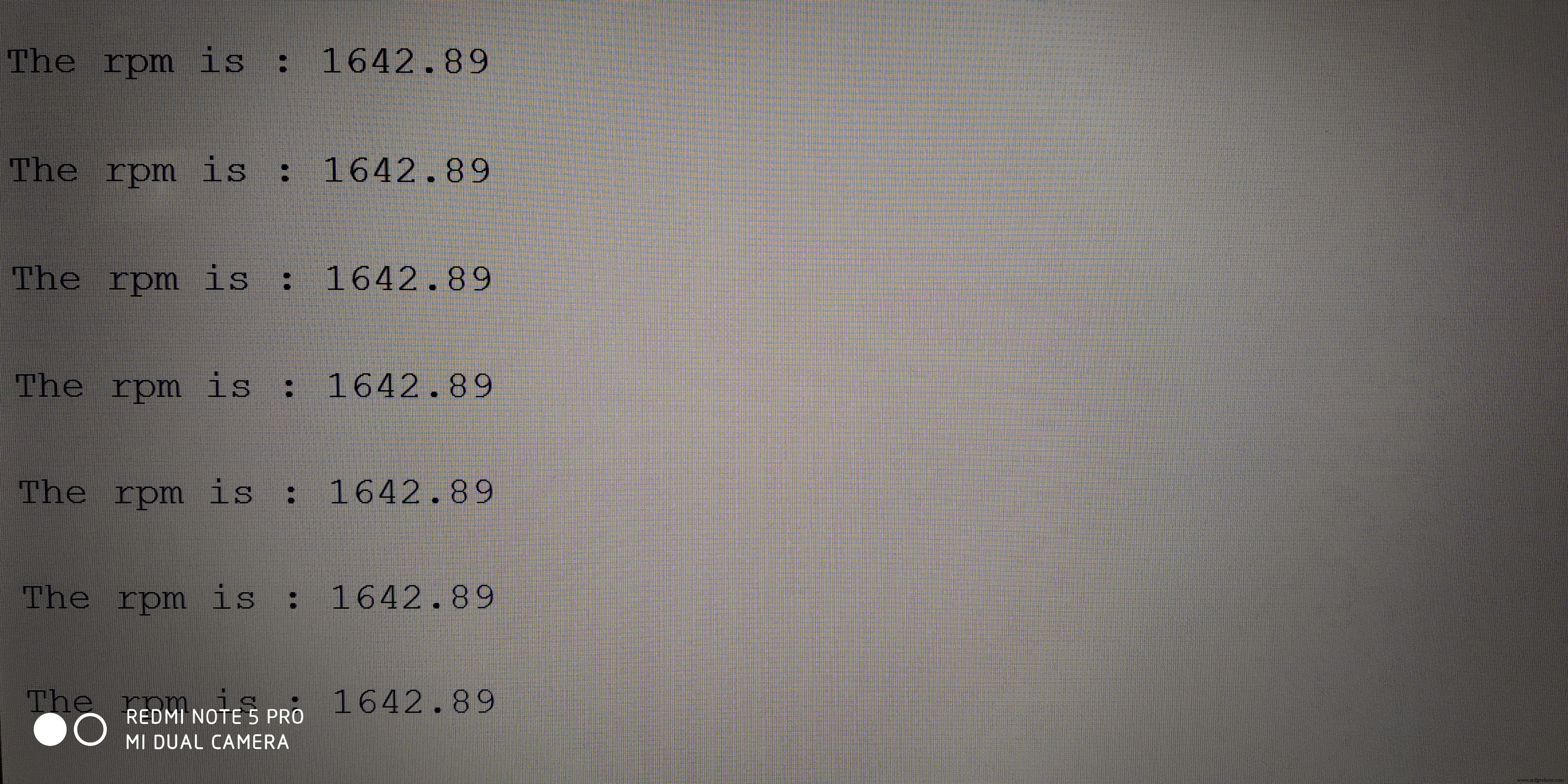
Em o acima exibido imagem de um saída amostra de o serial monitor em a teste correr, o taxa de saída triagem pode claramente seja visto qual é sobre 2 vezes a segundo. O RPM valores são calculado até dois lugares de decimais cada hora.
Todos que estiverem vendo isso devem experimentar este projeto uma vez e compartilhar suas valiosas avaliações. Fale sobre seus experimentos e seus resultados relacionados a este algoritmo. Sugestões de novos projetos são bem-vindas na seção de comentários. Se você gosta do projeto, respeite-o.
Siga meu perfil tocando neste link (https://create.arduino.cc/projecthub/YASH36) @ YASH36 para algumas novas atualizações do projeto.
Até então, fique seguro e aproveite o Arduino !!
Código
- RPM_counter_101
RPM_counter_101 Arduino
Este é o código para o contador RPM. // código de YaSh.int sen =A0; const float wid =0.012; // ajuste a largura da pá do ventilador de acordo com suas necessidades.const float rad =0.045; // ajusta o raio do ponto de detecção no fan blade.const float konst =6.2832; // 2 * pi.float time_1; float time_2; float vel; float diff; float tnet; float rpm; void setup () {Serial.begin (9600); pinMode (sen, INPUT); Serial.print ("\ n dê partida no motor pelo menos 3 segundos antes. \ N"); atraso (3000);} loop vazio () {if (analogRead (sen) <950) {time_1 =millis (); atraso (30); } if (analogRead (sen)> 950) {time_2 =millis (); diff =(tempo_2-tempo_1); vel =wid / diff; // velocidade de rotação tnet =(konst * rad) / vel; // tempo =(2 * pi * raio) / velocidade. rpm =(60000) / tnet; // tempo em ms para minutos e depois para etapa de conversão de rpm. } Serial.print ("\ n O rpm é:"); Serial.println (rpm);} Esquemas
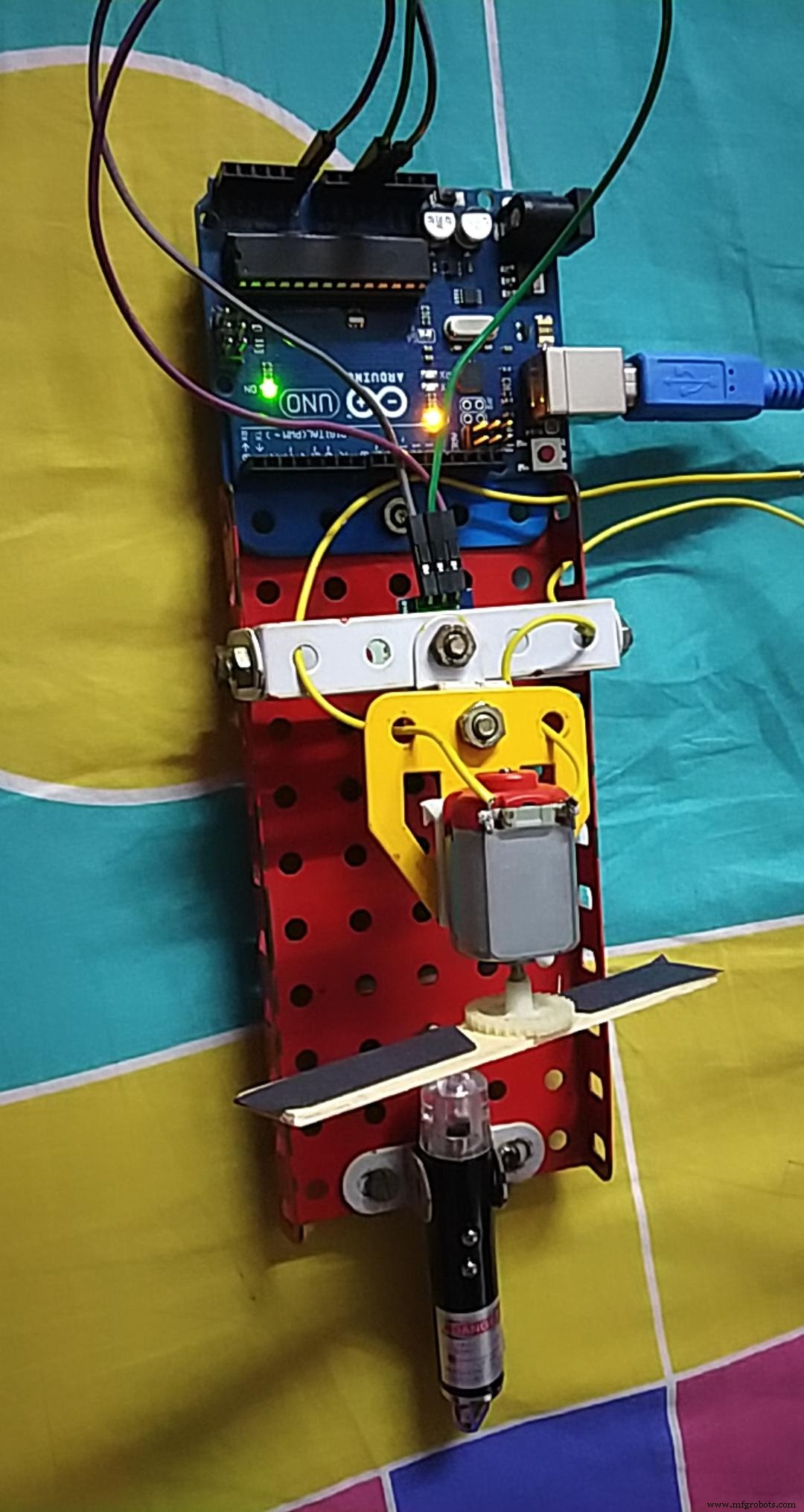
esta é a imagem para a base e a colocação de outros componentes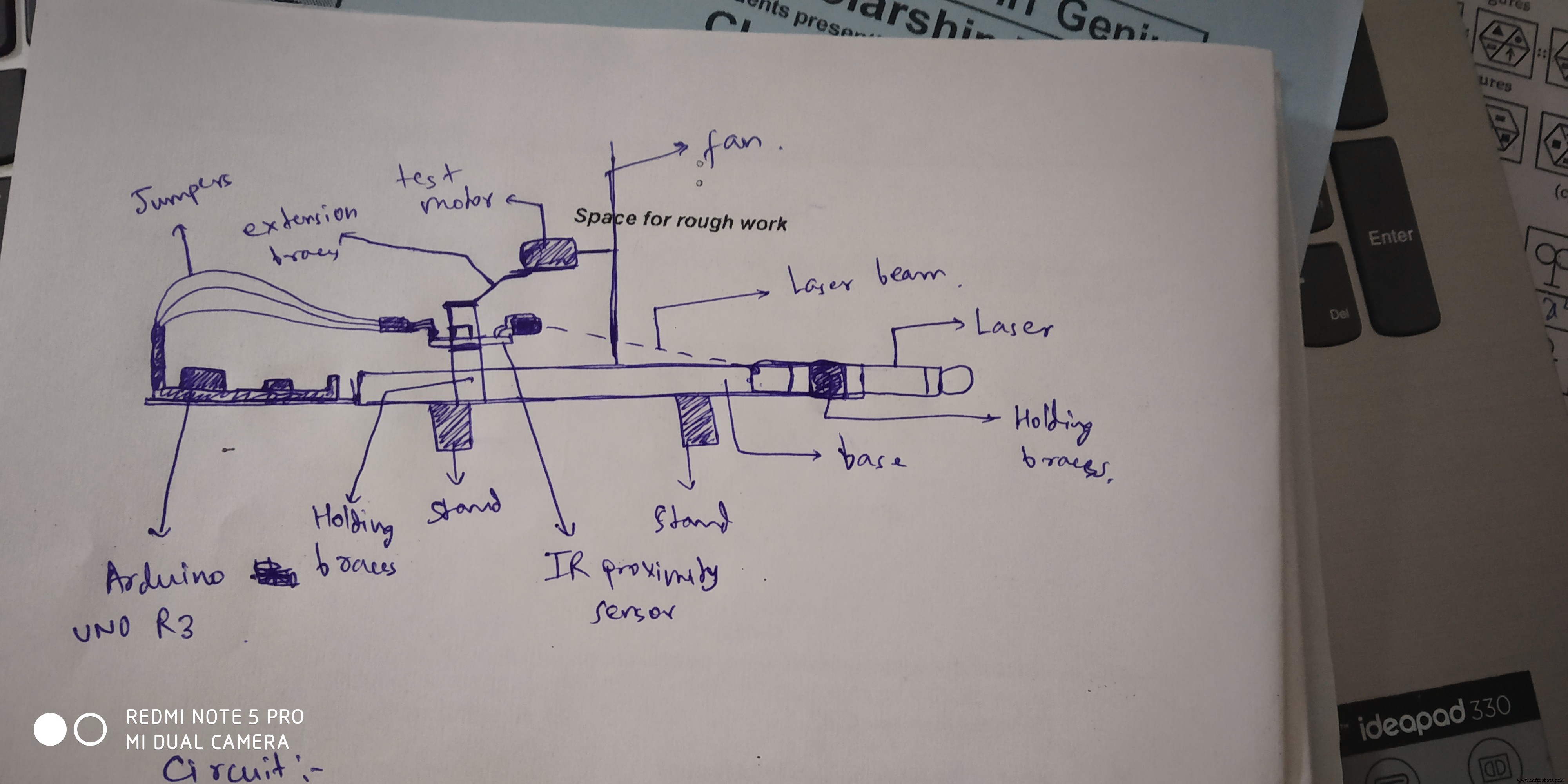 esquemático para conectar o sensor à placa Arduino
esquemático para conectar o sensor à placa Arduino 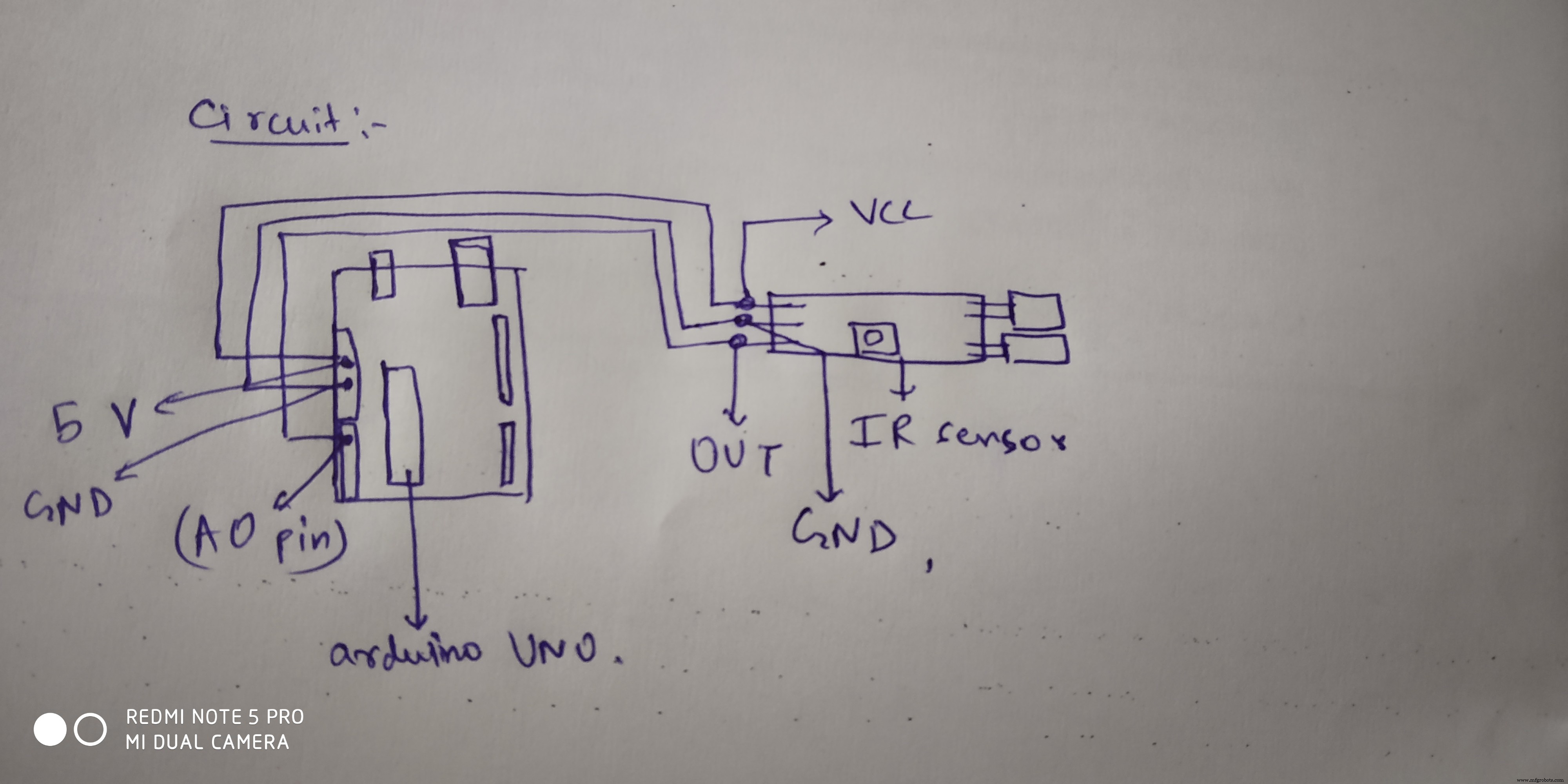
Processo de manufatura
- Aeroponia com Raspberry Pi e sensor de umidade
- Sensor Portenta e Termopar (com MAX6675)
- Jogo Arduino Gyroscope com MPU-6050
- Sensor DHT11 com LEDs e um alto-falante Piezo
- Monitoramento de CO2 com Sensor K30
- Unopad - Controlador Arduino MIDI com Ableton
- Registrador de dados de temperatura e umidade
- IOT - Jar inteligente usando ESP8266, Arduino e sensor ultrassônico
- Sensor de obstáculo simples com Arduino
- Arduino e autômatos celulares baseados em OLED