


Varredura Servo Solo
Componentes e suprimentos
 |
| × | 1 | |||
 /fit= /fit= |
| × | 1 | |||
| × | 1 | ||||
| × | 1 |
Sobre este projeto
Introdução
Solo tem um ótimo ambiente de desenvolvimento, mas falta I / O. Atualmente, a porta de acessórios oferece CAN, Mavlink Serial para Pixhawk e USB para Sololink (imx6). Ao usar um arduino e firmata, é possível adicionar sensores personalizados, servos de controle, LEDs intermitentes ou qualquer outra função do arduino.
Este tutorial o guiará pelas etapas de uso de um arduino com Solo para controlar um servo.
Requisitos de software:
- Atualização Solo 1.2.0 ou superior
- Arduino IDE
- Filezilla
- Putty ou qualquer outro cliente SSH
Etapa 1:Carregar Firmata Host para Arduino Uno
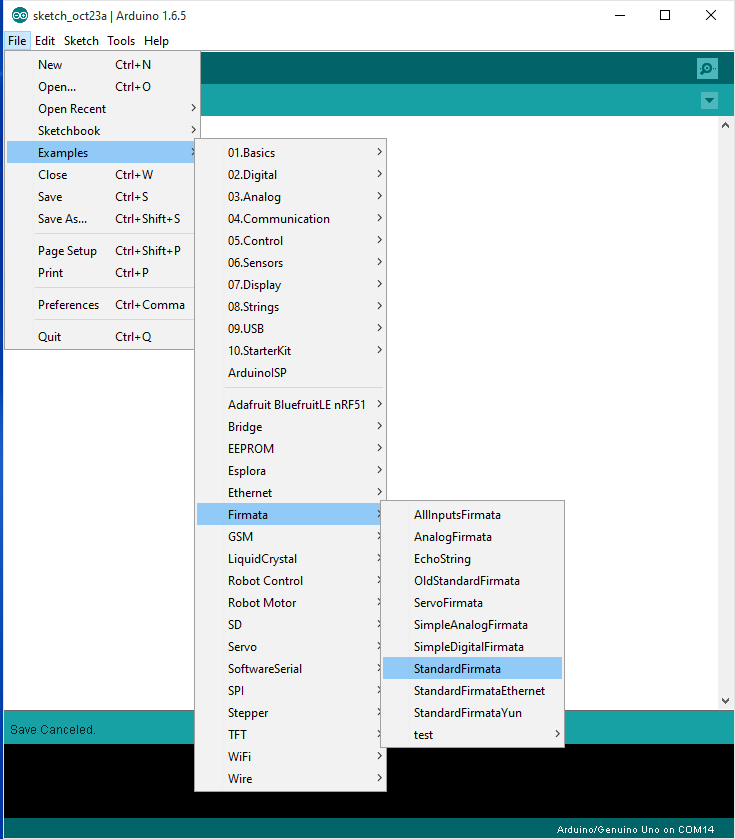
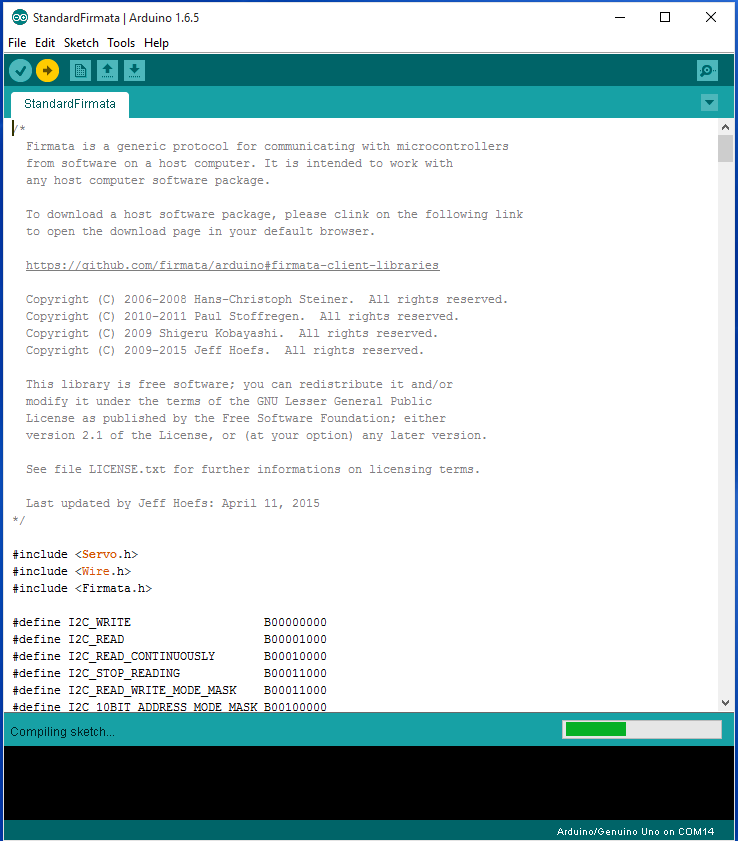
Abra StandardFirmata na guia de exemplos. Selecione a placa e a porta. Upload!
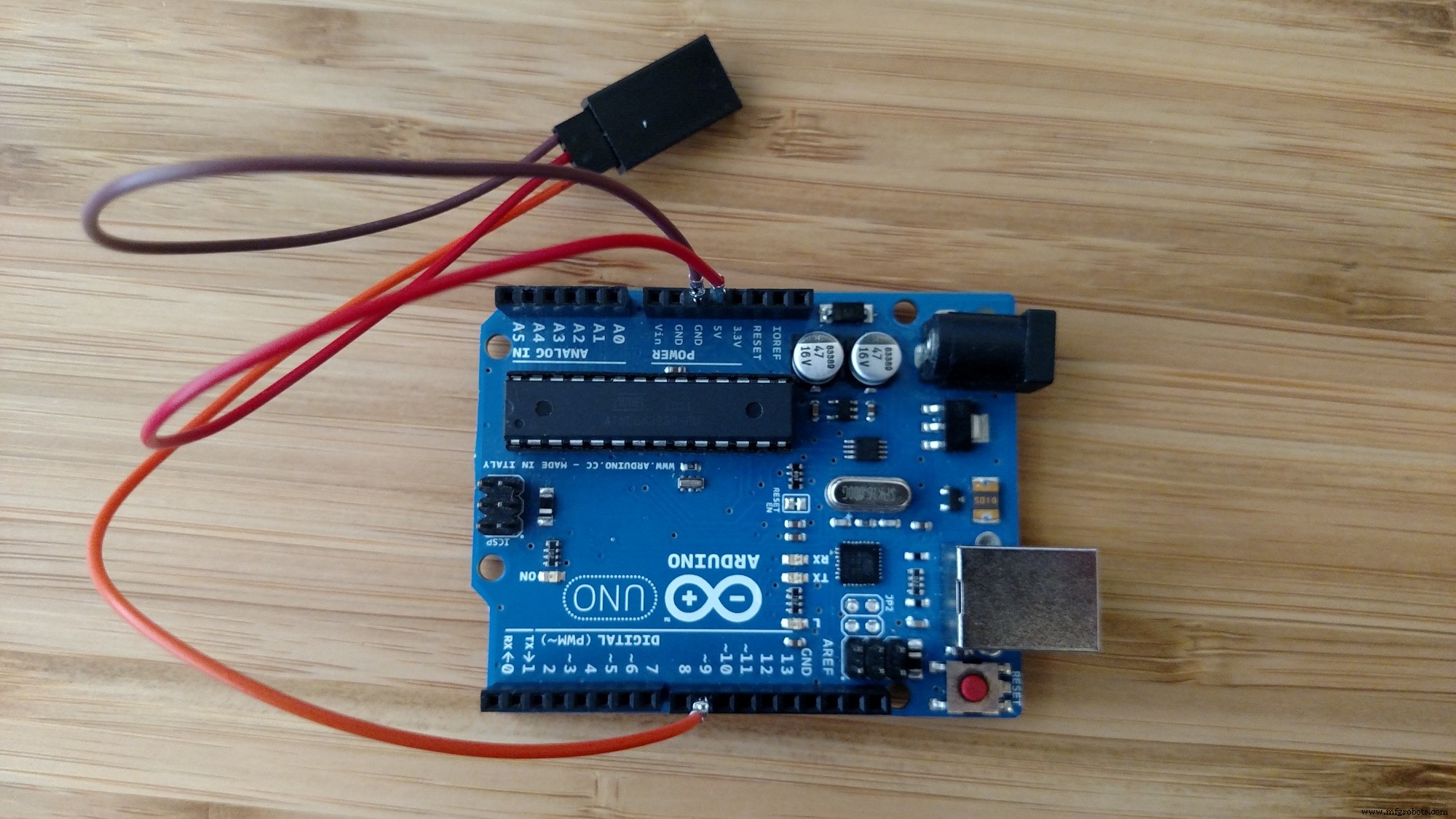
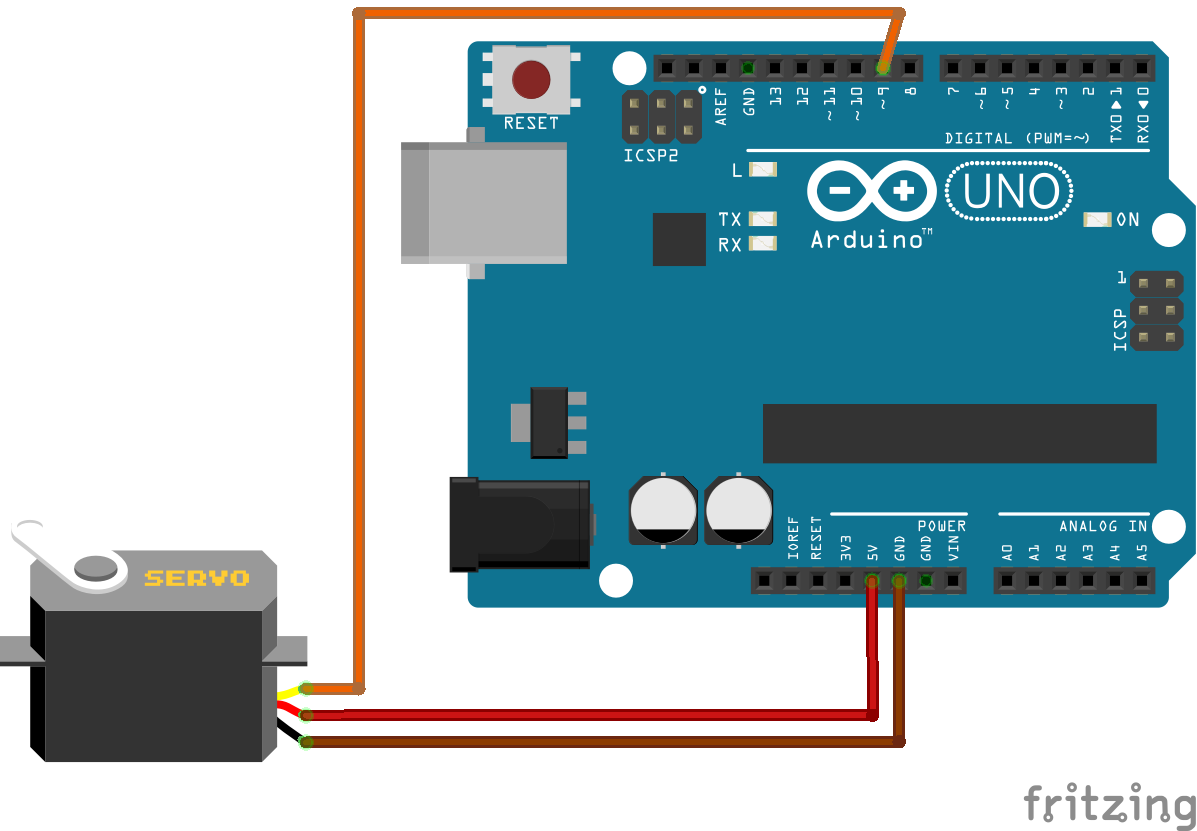
Etapa 2:configuração do hardware
Peças



Nota:A placa de breakout não é vendida neste momento. Por favor, consulte aqui
Montagem
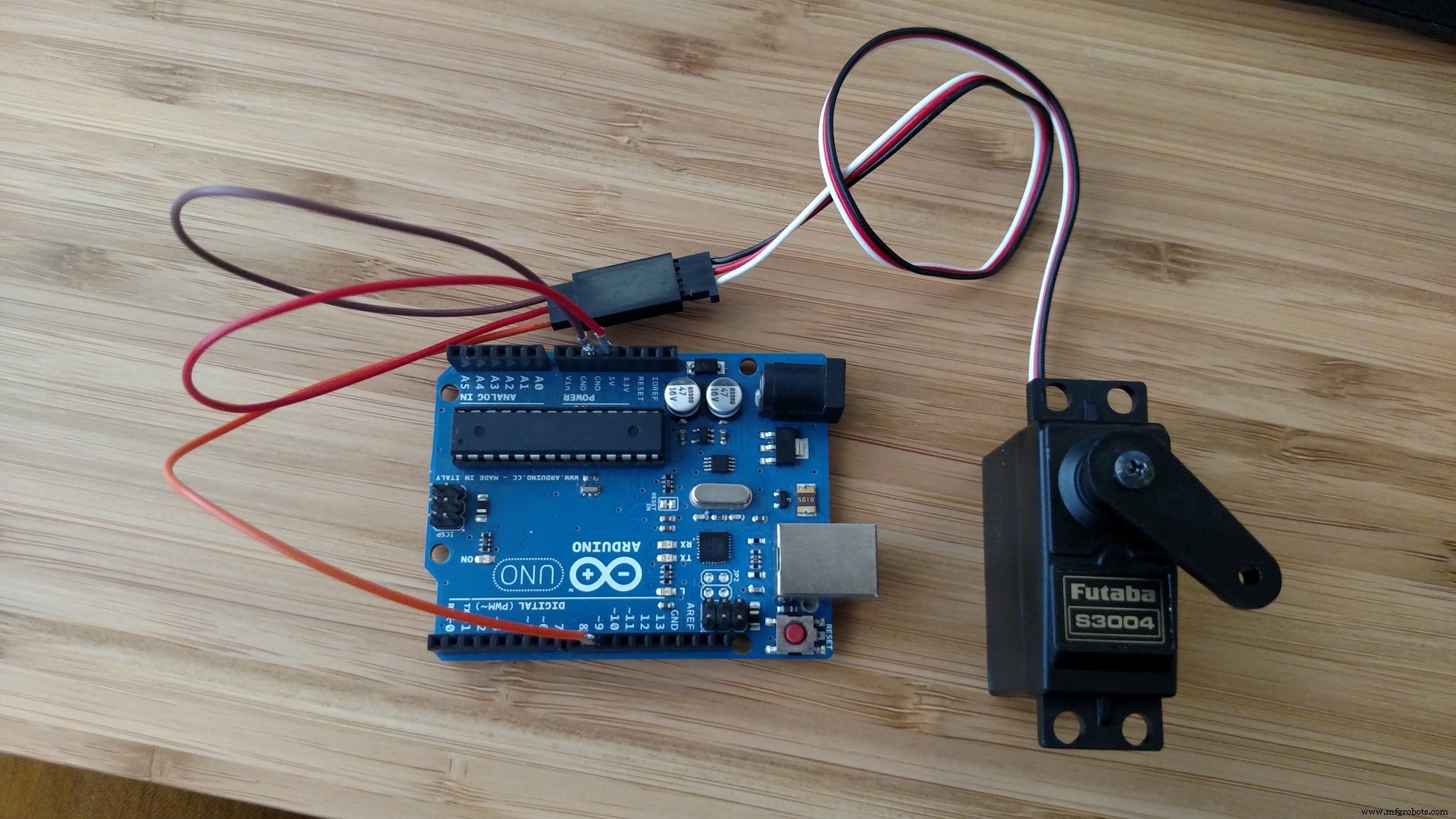



Ligue

Etapa 2:Baixe pyMata e código
pyMata
SoloServoSweep.py
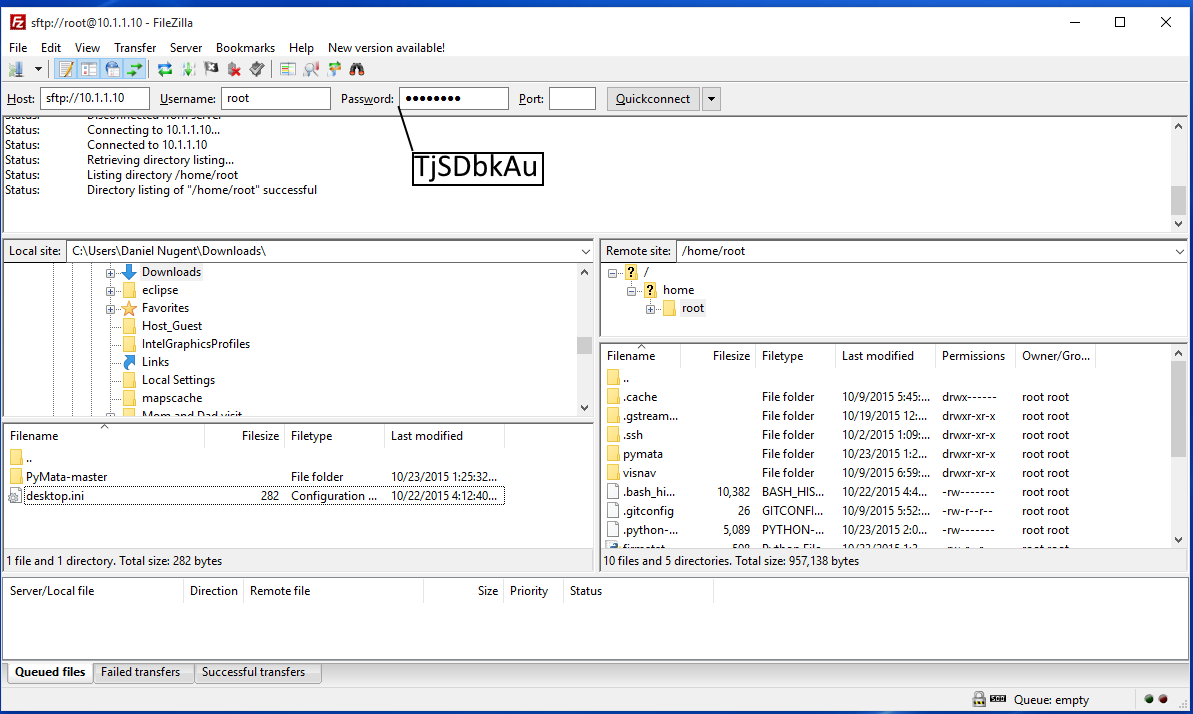
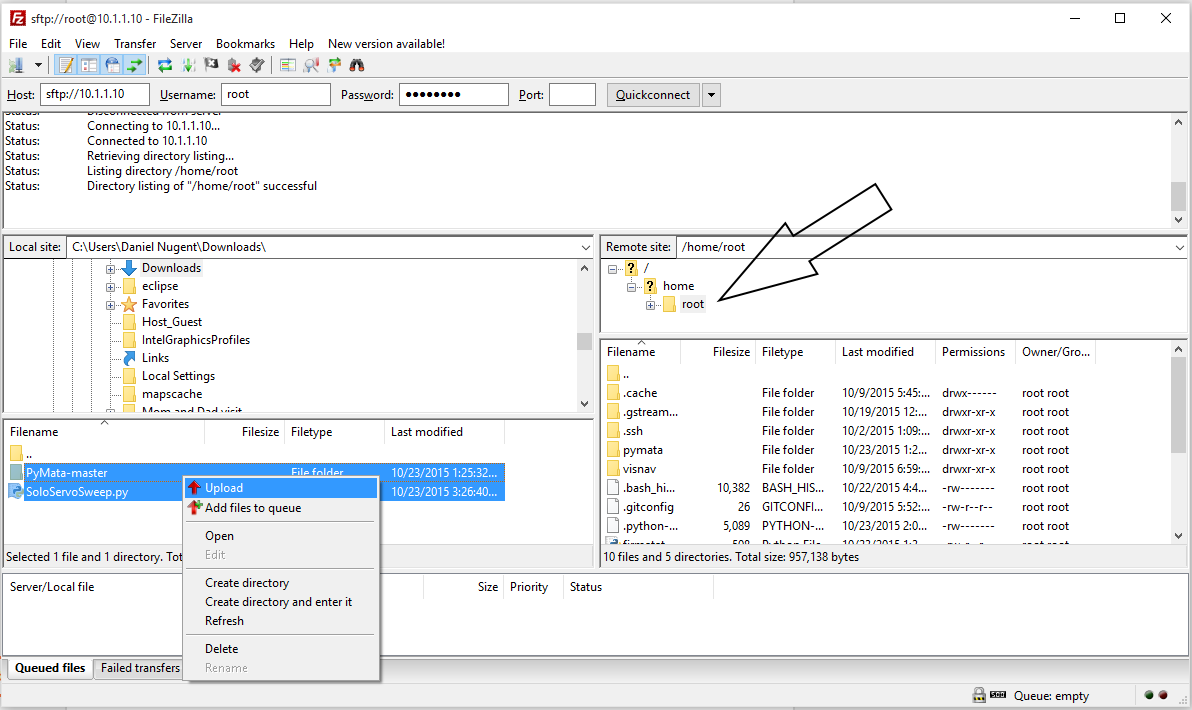
Etapa 3:transferir arquivos para Solo
- Conecte-se à rede Wifi do seu Solo!
Etapa 4:SSH em Solo
SSH em Solo usando o cliente SSH do seu sistema operacional. Para Windows, usaremos Putty.
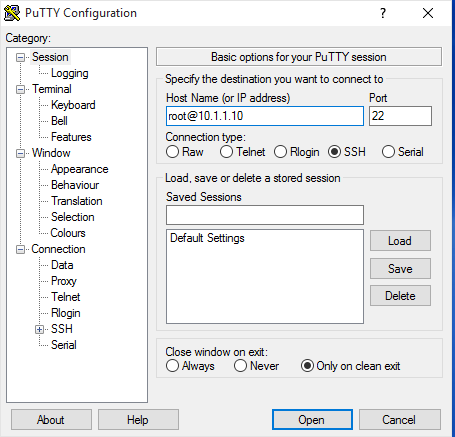
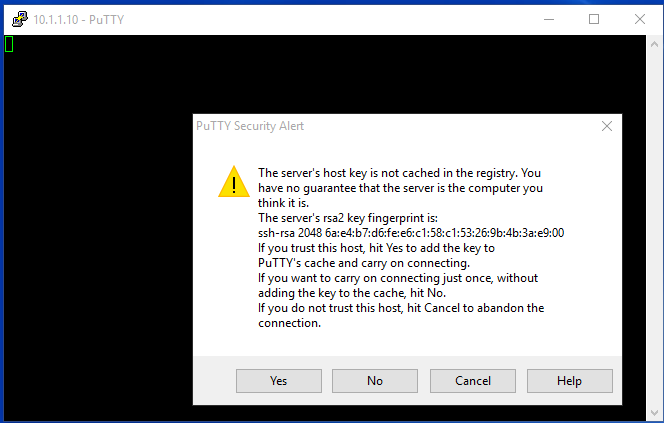
Certifique-se de que ainda está conectado ao Wi-Fi do Solo!
Veja as legendas das fotos para mais detalhes
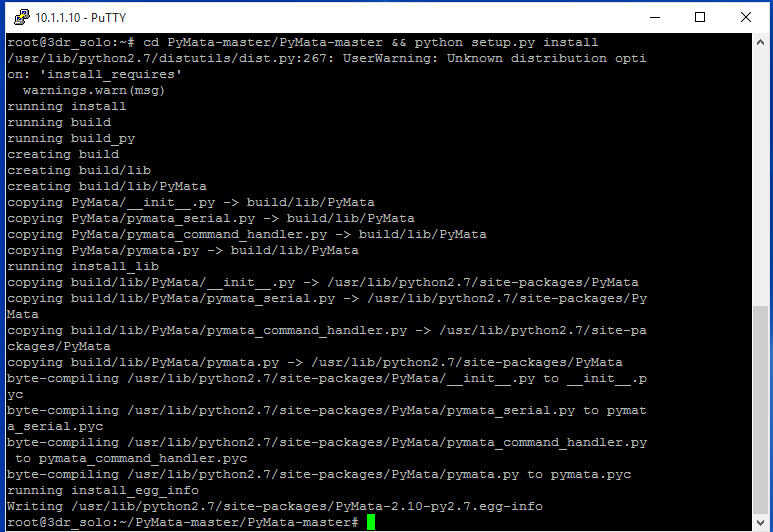
Etapa 5:Instale o pyMata
Execute este comando em sua sessão SSH:
Este deve ser o seu resultado
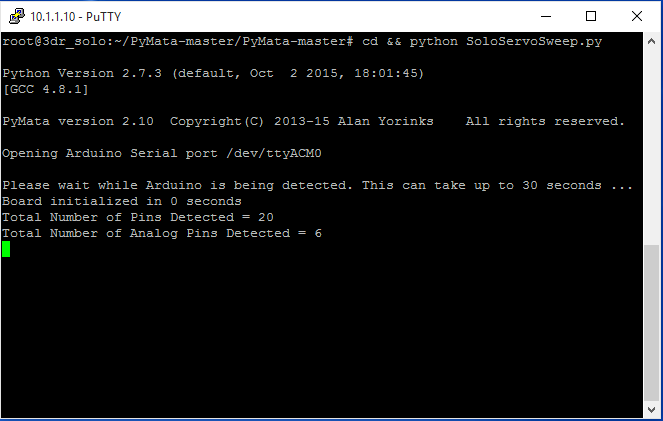
Etapa 7:execute o exemplo
Enquanto sua sessão ssh ainda está aberta, execute:
Código
- SoloServoSweep.py
SoloServoSweep.py Python
Dirija um servo em python de Solo de PyMata.pymata import PyMataimport timeimport sysSERVO_MOTOR =9 # servo conectado a este pinEND =170 # Viagem máxima do servo # crie uma instância PyMata =PyMata ("/ dev / ttyACM0") # configure o pino como servoboard.servo_config (SERVO_MOTOR) try:enquanto True:para i no intervalo (0, END):# sweep up board.analog_write (SERVO_MOTOR, i) time.sleep (.015) para i no intervalo (END, 0, - 1):# varrer board.analog_write (SERVO_MOTOR, i) time.sleep (.015) exceto KeyboardInterrupt:board.close () sys.exit () Peças personalizadas e gabinetes
Solo Breakout Board
Breakout board para porta de acessórios 3DR Solohttps://github.com/3drobotics/Pixhawk_OS_Hardware/tree/master/Accessory_Breakout_X1Esquemas
Processo de manufatura