


De quantos eixos seu posicionador robótico precisa?
Você decidiu que precisa de um posicionador robótico... mas de quantos eixos você precisa?
Há tantos modelos de posicionador com tantos estilos diferentes. Alguns têm 1 eixo simples, mas outros têm muitos!
O que é ainda mais confuso é a variedade de configurações que os posicionadores podem ter. Os eixos podem ser montados verticalmente, horizontalmente e em qualquer ângulo entre eles.
A escolha de um posicionador com muitos ou poucos eixos pode significar um desperdício de orçamento; Mas quantos são demais!?
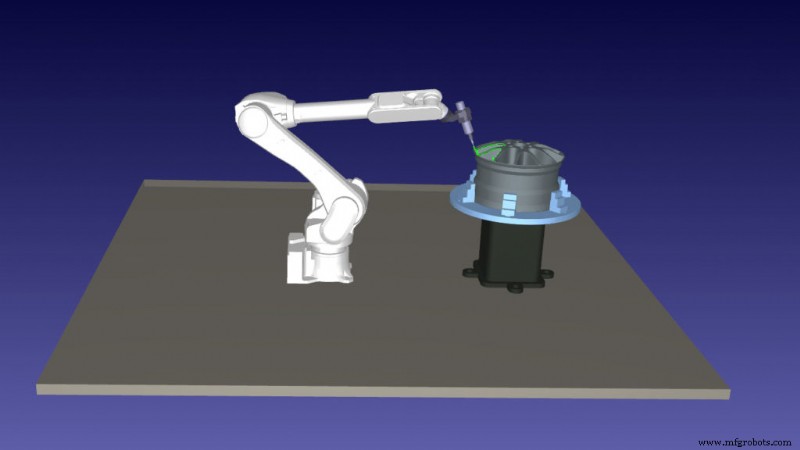
Se você está considerando um posicionador robótico, provavelmente já viu vários modelos diferentes. Você provavelmente já viu plataformas giratórias de eixo único, posicionadores de eixo duplo e rodas gigantes de vários eixos. Você provavelmente já explorou diferentes marcas, estilos e faixas de preço.
Até agora, se você for honesto, provavelmente está começando a ficar um pouco cansado dos posicionadores.
O problema com os posicionadores é que não é apenas um simples caso de dizer “vou comprar este” e deixar por isso mesmo. O posicionador que você escolher afetará a facilidade de integrar e programar sua célula robótica. Você não quer escolher o errado e se esforçar mais do que o necessário para implantar e programar o robô.
Por exemplo, se você obtiver um posicionador de 5 eixos com um robô de 6 eixos, são 11 eixos que você precisa controlar! Se for necessário ter tantos eixos, tudo bem. Mas, se não for necessário, você pode se arrepender de sua compra.
Por que “Quantos Eixos?” É uma pergunta confusa
Perguntar quantos eixos seu mecanismo precisa é uma pergunta muito natural. No entanto, é uma pergunta difícil de responder satisfatoriamente.
Quando falamos apenas de robôs industriais, uma resposta comum é dizer que são necessários robôs de 6 eixos. Isso nem sempre é verdade, mas é verdade na maioria das vezes. A razão para isso é que são necessários 6 eixos para alcançar pontos no espaço de trabalho do robô de qualquer posição e orientação.
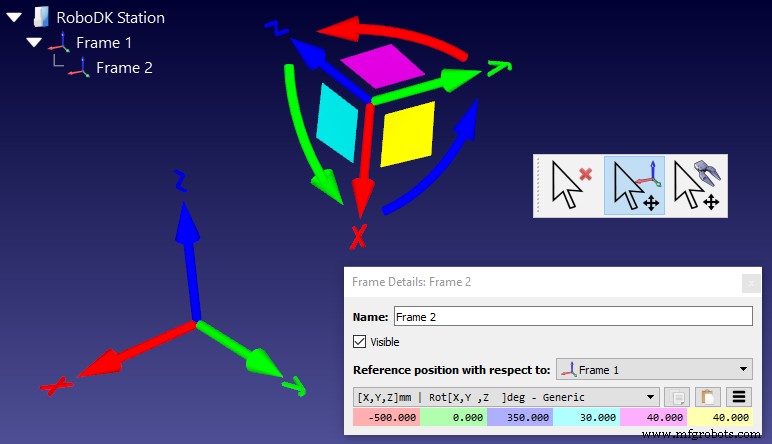
Como explicamos em nosso Euler Angle Primer, a posição do efetor final de um robô é controlada com 6 parâmetros:3 parâmetros translacionais (X, Y e Z) e 3 parâmetros rotacionais (Rot[X], Rot[Y] e Rot [Z]).
Se o seu robô tiver menos de 6 eixos, você restringirá a flexibilidade do robô. Isso faz sentido para alguns robôs – por exemplo, robôs de paletização que só precisam se aproximar de objetos por cima. No entanto, em geral, os robôs industriais de 6 eixos são os mais úteis para uma ampla gama de tarefas.
Além dos 6 eixos, no entanto, seu mecanismo se torna “redundante”.
Por exemplo, robôs de 7 eixos podem alcançar os mesmos pontos em seu espaço de trabalho que um robô de 6-DoF. No entanto, o controle de um mecanismo redundante torna-se mais complicado. Como resultado, você não deseja adicionar DoF extra se eles não forem necessários.
Adicionar um posicionador significa adicionar mais DoF ao robô. Isso pode ou não levar a um sistema redundante.
A necessidade de DoF extra depende das necessidades específicas de sua tarefa.
7 etapas para identificar o número de eixos necessários para sua aplicação
A maneira de aprimorar quantos eixos você precisa é examinar mais de perto os requisitos de sua aplicação.
Aqui está um processo que você pode usar para identificar alguns posicionadores em potencial que podem funcionar para você. Ele permite que você amplie alguns modelos em potencial e os avalie adequadamente. Se nenhuma dessas opções for adequada, você pode diminuir o zoom novamente e usar as informações que aprendeu para escolher um posicionador melhor.
- Observe os requisitos de sua tarefa, concentrando-se principalmente no espaço de trabalho necessário. Uma boa maneira de fazer isso é construir seu aplicativo em um simulador de robô.
- Observe quais aspectos da tarefa não são possíveis ao usar o robô sozinho. Quais partes do espaço de trabalho são inacessíveis? Quais movimentos são impossíveis?
- Com essas informações, faça um palpite sobre um ou dois tipos de posicionador que possam atender às suas necessidades. Lembre-se de levar em consideração a carga útil necessária para manter suas peças de trabalho.
- Encontre alguns posicionadores no mercado que possam atender aos seus critérios e teste-os em sua simulação. Para cada posicionador que você tentar, salve sua configuração como um novo projeto, pois você voltará a um dos projetos mais tarde.
- Se um dos modelos funcionar perfeitamente, ótimo! Mesmo assim, teste algumas opções para ver quais propriedades são realmente necessárias. Lembre-se de que você não quer acabar com mais DoF do que o necessário.
- Se nenhum dos modelos funcionar para seu aplicativo, use as informações coletadas para refinar seus requisitos.
- Volte ao mercado e procure um ou dois modelos que atendam a esses novos requisitos. Teste novamente em sua simulação antes de fazer sua escolha.
Usar um processo como esse remove algumas das suposições da identificação do número correto de eixos. A cada teste em sua simulação, você aprende um pouco mais sobre o que realmente precisa de um posicionador para concluir sua tarefa.
Faça uma escolha e trabalhe com ela
Depois de se concentrar em um modelo que funcione para sua tarefa, você pode avançar e desenvolver o aplicativo de forma mais completa no simulador.

Abra seu projeto salvo com o posicionador escolhido e refine-o no aplicativo completo. Isso permitirá que você teste todos os aspectos da tarefa e prepare o aplicativo para fácil integração.
Depois de comprar seu posicionador, você não precisa se preocupar se mais eixos poderiam ou não ter beneficiado a tarefa. Os robôs são muito flexíveis e geralmente existem várias maneiras de realizar as mesmas ações com um único robô.
Se você encontrar algum problema ao implantar o robô, quase certamente poderá encontrar uma solução usando o equipamento que possui. Esse é o valor de fazer escolhas de compra usando um simulador como banco de testes.
Que tipo de posicionadores você está considerando? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no RoboDK Forum.
A moagem robótica realmente vale a pena?
Como convencer a gerência a concordar com a usinagem de robôs
Robô industrial
- Como um robô alcança total autonomia?
- Quão preciso seu sistema de rastreamento de ativos deve ser?
- Quantas camadas e nós ocultos uma rede neural precisa?
- Whitepaper:Como Encontrar o Potencial do Seu Robô
- Como integrar com sucesso a robótica em suas instalações
- Quanto custa a automação robótica?
- Centro de soluções virtuais:Como a simulação do robô ajuda na integração do robô?
- Como a tendência da máquina robótica entrega o ROI ao longo do tempo?
- Como sei que é hora de comprar um robô?
- Quanto HP uma bomba hidráulica precisa?