


Como um robô alcança total autonomia?
Quando a maioria das pessoas pensa em robôs totalmente autônomos, elas se preocupam com cenários fantasiosos de IA que têm pouca base nos fatos reais - e nos mistérios - que sabemos sobre a consciência. Enquanto se fixam nisso, fica mais difícil para as pessoas ver o valor prático dos robôs que podem funcionar de forma independente e sem supervisão substancial quando há uma variedade de trabalhos, processos e setores que PRECISAM de muito mais ajuda para melhorar sua lucratividade e impacto positivo.
Ao mesmo tempo, a autonomia do robô foi vítima de algumas definições - e expectativas - que não são necessariamente úteis para entender o que um robô precisa para se tornar autônomo e onde a autonomia pode ser alcançada mais rapidamente.
Ao permitir que um robô alcance total autonomia, vários critérios devem ser atendidos:
- O robô deve ser capaz de obter informações significativas sobre seu ambiente por conta própria
- O robô deve ser capaz de processar essas informações de uma forma estruturada e utilizável
- O robô deve ser capaz de planejar suas ações em resposta a essas informações
- O robô deve ser capaz de executar o plano que gera em tempo hábil
Em todas essas circunstâncias, é importante entender mais algumas coisas em termos de como esses parâmetros são estruturados:
- Um robô deve ter um objetivo. Embora tradicionalmente associemos a autonomia humana com a capacidade de definir seus próprios objetivos, não há nenhum parâmetro esperado dentro do qual os robôs de hoje se tornem autoconscientes.
- A autonomia de um robô deve ser específica para o caso de uso. Um carro totalmente autônomo pode funcionar em diferentes níveis - alguns na rodovia, outros em todos os terrenos. Dependendo das circunstâncias, ambos podem exercer o mesmo grau de autonomia.
- O design funciona melhor quando minimiza a necessidade de entrada humana - enquanto certos aplicativos "cobot" autônomos podem ajudar a otimizar a produtividade ou o alcance de uma meta desejada, na maioria das circunstâncias, a autonomia não seria um qualificador adequado onde o envolvimento humano direto É necessário.
Então, como vamos do ponto A ao B? Como um robô tradicional “programável” se torna totalmente autônomo? Bem, é aí que começa a diversão!
Obtenção de informações sobre o meio ambiente
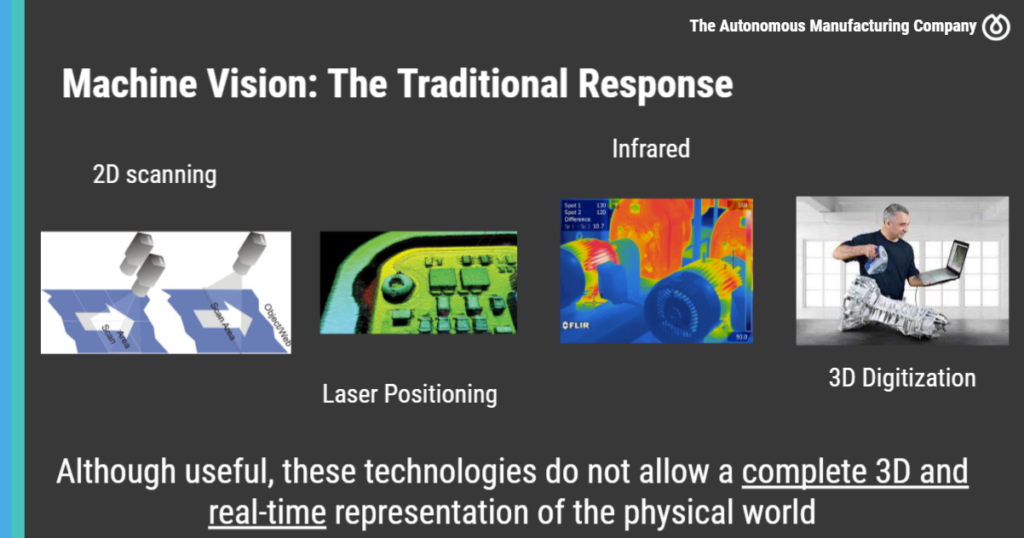
Há uma ampla gama de soluções para permitir que um robô saiba o que está acontecendo ao seu redor. Lidar, radar, sonar, sensores táteis, todos os diferentes tipos de sistemas de visão, um número infinito de diferentes mecanismos de comunicação de sensores extra-robóticos, câmeras ou sistemas de informação locais que podem ser de áudio ou vídeo por natureza. Tudo isso é simplesmente uma tentativa de dar aos robôs os mesmos tipos de sentidos que um ser humano tem, e há muito são o padrão em campos como o controle automático de máquinas para processos de automação altamente especializados.
É importante considerar que a detecção não é a única limitação aqui. Por exemplo, em sistemas industriais que agora são habilitados para IoT (Internet of Things) - ou pelo menos em rede - diferentes processos e controladores lógicos programáveis podem ser conectados em diferentes strings usadas para executar diferentes processos. O que pode ser feito a partir daí, no entanto, é na verdade incorporar essa informação em processos robóticos para entender a posição, orientação e manipulação necessária para ocorrer em um objeto.
Fora das circunstâncias industriais, os mesmos modelos podem ser aplicados, mas precisam ser contextualizados com os tipos certos de informações conectadas. Por exemplo, se alguém está procurando criar um robô para cuidados médicos ou de idosos, recursos de detecção externa podem ser úteis para gerenciar a saúde de um paciente, mas sem a segurança adequada e anonimato, eles também podem oferecer privacidade ou riscos de agência quando se trata de quem está sendo cuidado e por qual robô em que circunstância.
Da mesma forma, o 5G é visto como uma grande oportunidade para coordenar futuros carros autônomos e gerar eficiência na automação de todos os aspectos da direção e transporte - tudo ao mesmo tempo em que otimiza coisas como condições das estradas, gargalos, estradas bloqueadas e muito mais. Embora sejam aplicativos muito poderosos, a maneira como as informações são traduzidas para um robô deve ser tratada com delicadeza. Afinal, com grande poder vem uma grande responsabilidade.
Processando as informações de forma estruturada
Como digerir informações de uma forma utilizável? Quando pensamos em como fazemos isso como humanos, é uma segunda natureza ou, muitas vezes, instintivo em termos de como tomamos decisões. O que muitas vezes deixamos de perceber é que muitas de nossas decisões são baseadas em traços evolutivamente, socialmente ou comportamentalmente adquiridos - bem como em características de nossa personalidade - que fazem a forma como operamos às vezes parecer determinista, embora não sem surpresas ou divertidas!
Quando se trata de robôs, no entanto, não gostamos de surpresas! Boas surpresas, claro - coisas como descobrir que um robô é melhor ou mais eficiente do que poderíamos esperar são ótimas, mas se isso significa que precisamos antecipar todas as funções possíveis de um robô autônomo - seja na entrega, transporte, prestação de cuidados , manuseio de materiais, inspeção, manutenção preditiva, processos industriais ou simplesmente um cão robô que faz backflips - gerenciar nossas expectativas é muito mais preferível do que uma “falha de funcionamento”.
Por causa disso, é importante perceber que criar um robô autônomo raramente significará que as coisas funcionem fora da caixa. Enquanto algumas empresas e acadêmicos estão trabalhando em maneiras de simplificar os modelos fundamentais de detecção e processamento de robôs autônomos, esses modelos devem, em última instância, contribuir para os modelos de processo que simplificam a capacidade de um robô de usar informações de maneira acionável.
Planejando ações a partir de dados
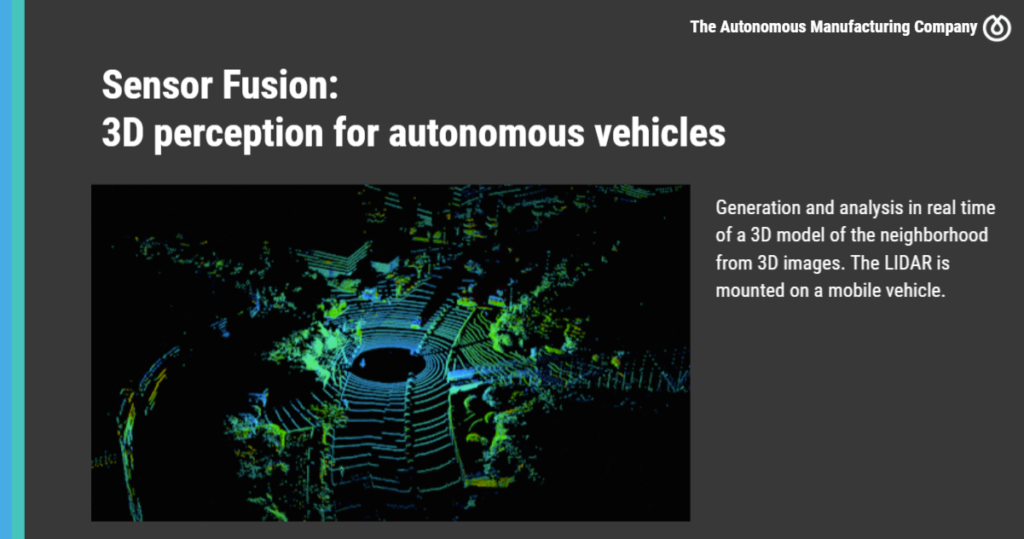
Os dados gerados pelos mecanismos de detecção de um robô podem ser digeridos de várias maneiras. Em última análise, para dados visuais 3D, a maneira mais simples possível é quebrar e reintegrar os dados em uma forma em um objeto inteiro. Este é um processo paralelo que requer um acúmulo de muitas pequenas operações - enquanto o cérebro humano funciona de forma muito flexível, gerar modelos confiáveis para esse tipo de processamento requer repetição e validação significativas.
O aspecto mais útil desse processo é injetar dados em um modelo de processo geral para tudo o que o robô precisa fazer. Levantar e carregar algo? Deixar a correspondência em uma caixa de correio? Pintar ou soldar algo junto? Cada uma dessas ações requer uma compreensão holística da natureza, localização, posição e resultados não conformes de uma meta (por exemplo, a correspondência vai para a caixa, mas há um buraco no fundo e ela cai em um arbusto).
Ao mesmo tempo, para expandir este exemplo de e-mail, metas de fallback devem ser estabelecidas a fim de alcançar um resultado ainda aceitável de forma automatizada, sem sobrecarregar as principais prioridades da função autônoma do robô. Mais simplesmente:robôs autônomos devem ser capazes de improvisar, mas planejar essa improvisação dá muito trabalho.
Como Mark Twain disse uma vez:“Geralmente, levo mais de três semanas para preparar um bom discurso improvisado”. Isso não é simplesmente um engano, mas na verdade muito instrutivo sobre como os humanos funcionam. Embora muitas vezes estejamos focados nas tarefas que temos em mãos, temos um conjunto sofisticado de hábitos subconscientes com talentos adicionais como “propriorecepção”, que não são bem reconhecidos.
Embora essas sejam habilidades perfeitas para um robô que precisará fazer de tudo, desde balançar nas árvores até caçar na savana e talvez inventar a roda e atirar um pouco depois. Demorou milhões de anos para desenvolver esses recursos, então não se surpreenda que fazer um robô funcionar de forma autônoma pode levar mais de uma tarde.
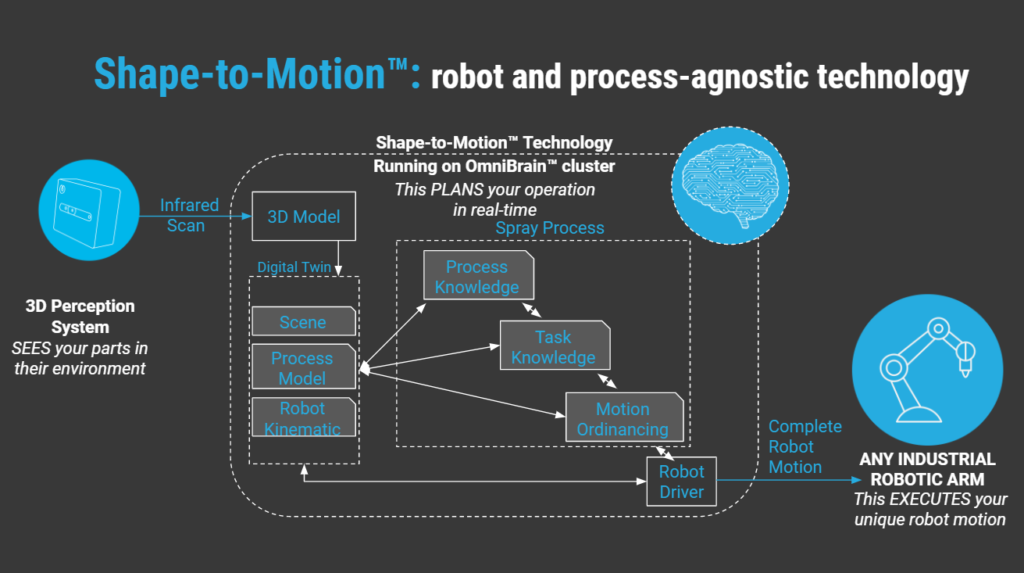
Então, nesse contexto, qual é a resposta para os robôs? Bem, da mesma forma que os humanos visualizam suas ações antes de executá-las, gerando simulações ou gêmeos digitais de uma função de robôs autônomos e usando isso para injetar as expectativas do modelo de processo (como onde uma caixa de correio geralmente está ou o que parece) é o maior passo que você pode dar para criar um robô autônomo útil.
Executando o Plano
Depois de ter um modelo de processo, simulações suficientes e os mecanismos de detecção calibrados corretamente, a execução é simplesmente uma questão de observação e otimização. Se o robô autônomo que você está construindo atende aos seus padrões logo que sai da caixa, não há necessidade de fazer isso. O valor fundamental dos robôs é sua consistência, e os robôs industriais modernos existentes são extremamente confiáveis. Adicionando camadas de percepção e inteligência para torná-los responsivos para diferentes partes e posições cria todo um novo mundo de autonomia que todos nós estamos procurando explorar
O que vem a seguir para essa autonomia? Simplificando a forma como os aplicativos são construídos, como mencionado acima, mas também aumentando a amplitude de sensores, arranjos de robôs, tarefas, ambientes e muito mais que podem ser executados. A bobagem é que a automação cria produtividade, o que acaba aumentando o crescimento, a renda e a demanda por mão de obra. Ver a automação como uma ameaça à força de trabalho é a verdadeira ameaça , ao mesmo tempo que traz automação para mais dos espaços que os trabalhadores não gostam tornará os trabalhos mais criativos, inovadores e divertidos do que nunca - se as pessoas ainda precisarem trabalhar. Aproveitar!

A Omnirobotic fornece Tecnologia de Robótica Autônoma para Processos de Pulverização, permitindo que robôs industriais vejam peças, planejem seu próprio programa de movimento e executem processos críticos de acabamento e revestimento industrial. Veja que tipo de retorno você pode obter com isso aqui ou saiba mais sobre como você pode se beneficiar com sistemas de manufatura autônomos .
Qual é a diferença real entre um robô autônomo e um HMI?
Como reduzir o custo de retrabalho na fabricação
Robô industrial
- Como robôs de pulverização melhoram a consistência
- Como os robôs de pintura reduzem o retrabalho
- Whitepaper:Como Encontrar o Potencial do Seu Robô
- Quanto custa a automação robótica?
- Centro de soluções virtuais:Como a simulação do robô ajuda na integração do robô?
- Materiais para construir um robô:uma lista completa
- Guia definitivo:como escolher um robô SCARA correto
- Robot Machine Tending:O que é e como funciona
- Como reduzir o tempo de treinamento para soldagem de robôs
- Como começar com a programação de robôs Yaskawa