


Cinemática inversa em robótica:o que você precisa saber
O que é cinemática inversa?
Quanto você precisa saber sobre isso para aproveitar ao máximo seu robô?
Cinemática inversa para robótica é um tópico enorme e muitas vezes complexo. Dependendo do seu projeto, talvez você precise conhecê-lo em detalhes ou se virar com o conhecimento básico.
Aqui estão as informações essenciais que você precisa saber sobre cinemática inversa para robótica.
O que é cinemática inversa?
A cinemática inversa é um processo matemático usado para calcular as posições das juntas necessárias para colocar o efetor final de um robô em uma posição e orientação específicas (também conhecida como “pose”). Uma solução cinemática inversa confiável é necessária para programar um robô para realizar tarefas.
É importante esclarecer as diferenças entre a cinemática inversa e a cinemática direta do robô.
A cinemática direta determina onde o efetor final estará se as juntas forem definidas para uma posição específica. Existe apenas uma solução para a equação cinemática direta. Quando as juntas são definidas para uma posição específica, o efetor final sempre terminará no mesmo lugar.
Com a cinemática inversa, muitas vezes existem várias soluções diferentes e várias abordagens para calcular a solução cinemática inversa.
Por que precisamos de cinemática inversa em robótica
Se não tivéssemos cinemática inversa, a programação de robôs seria extremamente difícil… se não impossível.
Quando você deseja que o efetor final do seu robô se mova para um local específico em seu espaço de trabalho, faz sentido inserir sua pose desejada no programa.
Mas você não pode simplesmente dizer a um robô para ir até o X, Y e Z desejado coordenadas e esperar que o robô entenda suas instruções... não sem cinemática inversa.
A maioria dos robôs industriais é construída com várias juntas articuladas controláveis de forma independente. Cada junta é conectada a uma ou mais das outras juntas, às vezes em configurações complexas. O efetor final é fixado no final de toda a “cadeia cinemática”. Quando você move qualquer articulação, isso afetará a pose do efetor final de várias maneiras.
Isso significa que não existe uma relação simples e direta entre a posição do efetor final e qualquer articulação em particular.
Por exemplo, se você deseja que o efetor final do robô se mova 1 mm linearmente ao longo do eixo Z, pode ser necessário mover todas as juntas em uma quantidade diferente.
Por fim, os algoritmos de cinemática inversa calculam a posição exata de cada uma das articulações do robô necessárias para alcançar a pose desejada do efetor final.
Como encontrar a cinemática inversa de um braço de robô
Quando você faz alguma pesquisa sobre cinemática inversa para robótica, muitas vezes você encontrará páginas e páginas de equações, fórmulas e descrições de algoritmos. Isso ocorre porque o cálculo da cinemática inversa é um campo bem estabelecido na pesquisa em robótica. Poucas pessoas falam sobre cinemática inversa fora do campo de pesquisa (exceto para animadores 3D).
No entanto, quando estamos usando robôs para aplicações industriais, existem 2 opções básicas para encontrar uma solução de cinemática inversa:
- Você mesmo pode fazer todo o trabalho matemático e de programação para criar um solucionador de cinemática inversa para seu robô específico.
- Você pode usar um solucionador de cinemática inversa existente para seu robô específico que funciona "pronto para uso".
Qual destes você escolher dependerá de sua situação única.
Se você mesmo construiu o robô - ou seja, construiu do zero conectando motores e links mecânicos - você provavelmente terá que escolher a Opção 1.
Se você estiver usando um robô industrial que veio de um fabricante de robôs, a opção 2 quase sempre será mais rápida e fácil.
O método difícil:criar um solucionador de cinemática inversa
Se você está escolhendo criar seu próprio solver cinemático inverso, prepare-se para uma programação séria!
Existem 2 abordagens fundamentais para calcular a cinemática inversa:
1. Soluções cinemáticas inversas analíticas
Um solucionador cinemático inverso analítico será capaz de tomar a pose desejada do efetor final e (quase) imediatamente cuspir as posições de junta necessárias.
Isso ocorre porque, “sob o capô”, a cadeia cinemática do robô foi reduzida a uma expressão de forma fechada – para qualquer pose do efetor final, há uma definição matemática das posições de articulação necessárias.
Embora você possa realizar o trabalho de gerar a expressão de forma fechada (à mão), isso geralmente não é necessário. Atualmente, a biblioteca IKFast torna essa tarefa muito mais fácil do que costumava ser no passado.
2. Solucionadores de cinemática numérica/iterativa
Nem todos os robôs têm uma solução cinemática inversa analítica. Quando a estrutura cinemática do robô é complexa ou incomum, a única opção é usar um solucionador de cinemática inversa numérica.
Além disso, em uma solução numérica, não há uma expressão de forma fechada clara. Em vez disso, quando você insere a posição do efetor final desejada, um algoritmo iterativo trabalha em direção a uma solução para as posições de junta necessárias, tratando-a como uma solução de otimização.
A cada iteração, o algoritmo insere algumas posições conjuntas na equação cinemática direta do robô para descobrir onde o efetor final termina. Na próxima iteração, ele usa essas informações para ajustar ainda mais as posições das juntas. Isso moverá gradualmente o efetor final em direção à pose desejada.
Devido a esta abordagem iterativa, as soluções de cinemática inversa numérica são mais lentas do que as soluções analíticas.
O método fácil:use um solucionador de cinemática inversa comprovado
Criar seu próprio solucionador de cinemática inversa é um bom exercício intelectual quando você está na universidade ou se está construindo seu próprio robô do zero.
Mas, se você quiser apenas usar seu robô em um ambiente de produção, é improvável que você precise criar seu próprio solver de cinemática inversa.
É muito mais fácil e rápido usar apenas um solucionador existente que já está incorporado ao ambiente de programação do seu robô.
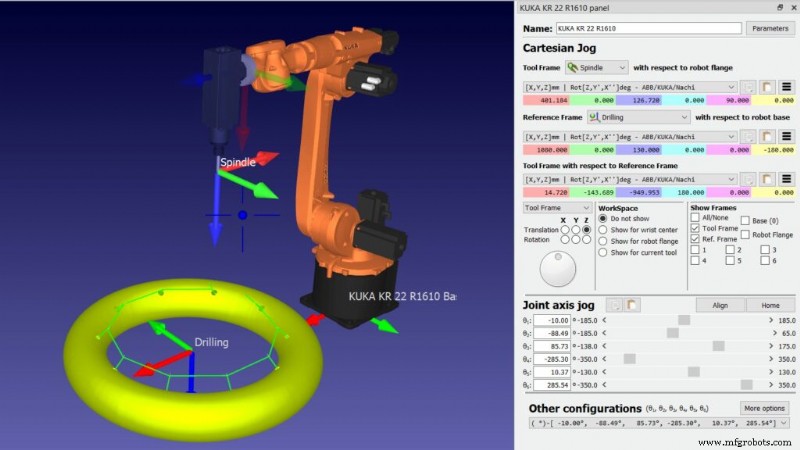
Todos os robôs da Robot Library do RoboDK vêm com seus próprios solucionadores de cinemática inversa. Isso permite que você comece a programá-los imediatamente sem ter que pensar nisso.
A maioria dos nossos solucionadores são soluções analíticas pré-geradas que vêm empacotadas com o arquivo do robô. No entanto, alguns dos robôs mais complexos da biblioteca usam solucionadores numéricos. Mesmo com os solucionadores numéricos, a velocidade reduzida de cálculo não é um problema com o RoboDK, pois você estará programando seu robô offline antes de enviar seu programa para o próprio robô.
Afinal, só crie seu próprio solver cinemático inverso se realmente for necessário.
Caso contrário, seu tempo será muito melhor gasto criando o programa do robô para sua tarefa e colocando-o em produção mais rapidamente.
Que perguntas você tem sobre cinemática inversa em robótica? Conte-nos nos comentários abaixo ou participe da discussão no LinkedIn, Twitter, Facebook, Instagram ou no RoboDK Forum.
Como começar com a programação de robôs Yaskawa
Como decidir qual robô é melhor com a visualização do espaço de trabalho
Robô industrial
- Manutenção preditiva - O que você precisa saber
- O que você precisa saber sobre a certificação CMMC
- O que você precisa saber sobre montagem de PCB
- Usinagem precisa de metal:o que você precisa saber
- O que você precisa saber sobre o processo de sobremoldagem
- O que você precisa saber sobre máquinas de exportação
- Motores CA e CC:o que você precisa saber
- O que você precisa saber sobre frenagem dinâmica
- O que você precisa saber sobre freios auxiliares hidráulicos
- O que você precisa saber sobre material de fricção industrial