


Atingindo rastreamento de movimento preciso em dispositivos portáteis de consumo
Nossas vidas foram transformadas por aparelhos portáteis conectados - mais obviamente o smartphone, mas também uma infinidade de outros, como smartwatches, rastreadores de fitness e dispositivos auditivos. Esses dispositivos combinam a coleta de dados com capacidade de processamento e conectividade sem fio.
Mas, entre todos os outros recursos, é fácil ignorar a importância dos sensores de movimento para tornar nossos gadgets mais funcionais e intuitivos. Seja mudando a orientação da tela em nossos telefones, contando passos em um smartwatch, combinando os movimentos de nossa cabeça com nossos óculos XR ou tocando nos fones de ouvido para mudar a música, o sensor de movimento é uma parte vital da experiência do usuário e da interface.
Para engenheiros embarcados, escolher e integrar sensores de movimento pode ser complicado. Como você pode garantir que escolheu a tecnologia certa para obter a precisão de que precisa, sem aumentar desnecessariamente os custos ou o consumo de energia? E como você deve garantir que obterá o máximo dos sensores e não perderá o desempenho ou os recursos que podem melhorar seu produto final?
Fundamentos dos sensores de movimento
Primeiro, uma rápida recapitulação do que entendemos por sensores de movimento. Existem três tipos comumente usados:acelerômetro, giroscópio e magnetômetro.
O acelerômetro mede a aceleração, que pode incluir aceleração devido à gravidade. Isso significa que ele pode sentir a direção da gravidade em relação ao sensor - basicamente, qual é o caminho para cima. O giroscópio mede a mudança na posição angular medindo a velocidade angular.
Com três graus de liberdade, ou eixos, para cada acelerômetro e giroscópio, a combinação de ambos nos dá um sensor de movimento de 6 eixos, ou unidade de medição inercial (IMU) (ver Figura 1). Para muitas aplicações, precisamos adicionar um magnetômetro, que mede a força e a direção do campo magnético da Terra, para que possamos estimar nossa direção. Adicionar um magnetômetro de 3 eixos no topo do acelerômetro e giroscópio cria uma IMU de 9 eixos.
Para o propósito desta postagem, vamos discutir IMUs. Embora existam certas propriedades que discutimos que podem ser aplicadas a um acelerômetro, giroscópio ou magnetômetro por conta própria, os desafios de combinar pelo menos dois desses sensores é o que gostaríamos de iluminar.
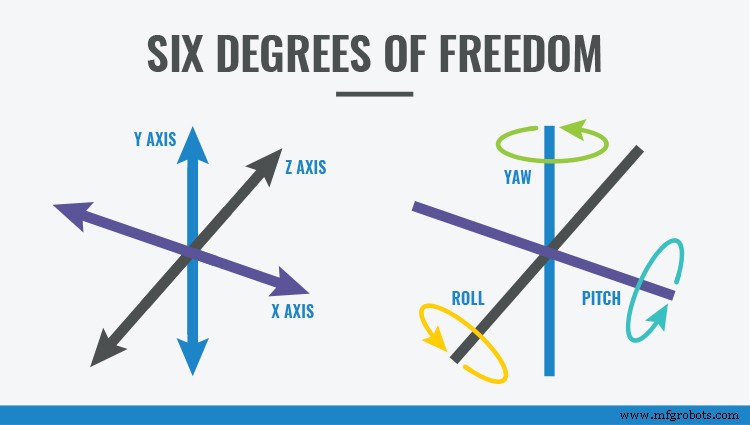
Figura 1:Detecção de movimento com uma IMU (Fonte:CEVA)
Mantendo a precisão
Agora que nos lembramos da teoria, como ela funciona na prática? Como podemos obter a precisão de que precisamos?
Para uma IMU, a precisão alcançada na determinação da direção do nosso dispositivo é uma métrica básica a partir da qual podemos começar. Nossos requisitos podem estar dentro de um grau ou dois, enquanto menos precisão pode ser aceitável para outra aplicação. Por exemplo, os requisitos de precisão de um fone de ouvido XR serão muito mais rígidos do que os de um brinquedo robótico infantil. Devemos então considerar a estabilidade desses dados e se eles irão variar com o tempo e com a temperatura.
A obtenção da saída de mais alta precisão de nossa IMU requer o uso de fusão de sensores, que é o conceito de combinar dados de vários sensores para criar uma soma maior do que suas partes. Cada sensor de nossa IMU tem diferentes pontos fortes e fracos que podem ser fundidos juntos para essa solução.
Uma maneira de pensar sobre a fusão de sensores é basear em "confiança". Nesse caso, podemos usar "confiança" para significar que os dados de um sensor específico têm um nível razoável de confiança para sua precisão e relevância. Digamos que você seja o presidente de um país e precise determinar as políticas. Você tem um conselheiro econômico, de saúde e militar. Cada um fornece informações, mas todos conhecem áreas diferentes. Eles têm suposições sobre como suas opiniões afetariam suas contrapartes, mas, infelizmente, são apenas suposições. Depende de você processar e fundir suas informações na melhor decisão.
Da mesma forma, você tem dois ou três "conselheiros" a quem pode recorrer para obter dados de orientação de sua IMU:o acelerômetro, o giroscópio e, às vezes, o magnetômetro. O giroscópio é o mais fácil de explicar. Os giroscópios de consumo podem ser confiáveis para mudanças de orientação relativa em curtos períodos de alguns segundos, mas a saída irá flutuar em intervalos de tempo mais longos, dezenas de segundos ou mais. O acelerômetro é útil para medir a gravidade a longo prazo, mas pode ser confundido por certos cenários, como a aceleração constante em um carro. Podemos confiar no magnetômetro em ambientes magnéticos estáveis, como no campo ou na floresta, mas nem tanto quando há interferência magnética, por exemplo, dentro de um escritório construído com pilares de aço.
Resumindo, o giroscópio é preciso para medições de curto prazo e o acelerômetro e magnetômetro para medições de longo prazo. Com uma compreensão cuidadosa de suas limitações, seus dados podem ser combinados para uma imagem mais precisa da orientação de um dispositivo.
Quando temos várias saídas de sensor, como uma IMU de 9 eixos, a fusão de sensores nos dá a oportunidade de combinar e comparar dados para melhorar a precisão. Por exemplo, se nosso software de fusão de sensor inclui um algoritmo para detectar mudanças inesperadas ou repentinas na saída do magnetômetro devido à interferência magnética, ele pode então colocar automaticamente mais confiança nos dados do acelerômetro e do giroscópio, até que o magnetômetro esteja estável novamente.
A taxa de amostragem também é importante para a precisão - o sensor escolhido fornece dados com freqüência suficiente para atender às suas necessidades? Isso depende da aplicação, é claro:por exemplo, algumas leituras por segundo podem ser suficientes para um contador de passos básico, mas 100 Hz a 400 Hz é recomendado para a maioria das aplicações. No entanto, taxas de amostragem de 1kHz ou mais podem ser necessárias para o rastreamento preciso da cabeça em aplicativos XR (XR é um termo abrangente para Realidade Virtual, Mista e Aumentada). Uma taxa de amostragem rápida também é importante para atingir baixa latência, o que em nosso exemplo de rastreamento de cabeça é a diferença entre uma experiência de RV imersiva e uma sensação de enjôo!
Também precisamos considerar a calibração. Muitos sensores são fornecidos "como estão" com pouco mais do que o que está escrito na folha de dados para você considerar. Qualquer tipo de calibração que possa ser feito ajudará a maximizar o desempenho consistente entre diferentes sensores individuais. A calibração de fábrica pode ser uma ótima maneira de melhorar o desempenho individual, mas é relativamente cara. A calibração dinâmica em campo é outra opção que requer uma compreensão detalhada dos próprios sensores ou, pelo menos, de sua aplicação. Sensores sofrem distorções que, quando não contabilizadas, podem impactar negativamente a saída geral a um ponto que exacerba qualquer erro existente.
Finalmente, precisamos pensar sobre como verificar os dados do sensor que obtivemos e fundimos. Embora isso dependa do que estamos rastreando, o princípio básico é usar outra fonte independente de informação para nos dar uma verdade com a qual possamos verificar nossa saída. Por exemplo, um braço de robô pode ser movido repetidamente com muita precisão para um ponto conhecido e podemos então verificar se nossos sensores nos fornecem os mesmos dados de posição. Quando detectamos um erro, pode ser possível compensá-lo com um cálculo ou pode ser necessário sinalizar como um erro que requer mais atenção.
Ativando novos recursos
Uma vez que conseguimos medir o movimento com alta precisão, isso não ajuda apenas com os aplicativos existentes - pode abrir a possibilidade de novos recursos em dispositivos portáteis. Por exemplo, com os audíveis (Figura 2), as interfaces de usuário convencionais são problemáticas:os usuários não querem se comprometer em puxar o telefone para controlá-los, e os próprios audíveis são muito pequenos para ter botões convenientes. Em vez disso, toques nos itens audíveis podem ser usados para pular uma música e detectar o movimento de tirá-los dos ouvidos pode ser usado para silenciar todo o áudio - já que é provável que você queira que o som pare de qualquer maneira. O uso de movimento e 'classificadores', que são algoritmos para identificar diferentes movimentos, leva a uma experiência do usuário mais conveniente e intuitiva.

Figura 2:Hearables (Fonte:CEVA)
Informações precisas de sensores de movimento também podem significar que seu dispositivo portátil tem mais ideia do que está acontecendo ao seu redor, ou em qual atividade você está envolvido. Isso é conhecido como consciência de contexto e pode ser usado para fornecer uma experiência mais imersiva, como como reduzir o volume de sua música quando alguém detecta que você caminhou até uma passagem de pedestres para permitir que você ouça a sirene de uma ambulância próxima.
Para aplicativos de rastreamento de condicionamento físico, o aumento da precisão pode diferenciar as diferentes atividades do usuário. Por exemplo, se seu rastreador de passos pode medir o tamanho, velocidade ou outras características de seus movimentos, ele pode funcionar se você estiver apenas caminhando normalmente, ou talvez subindo ou descendo escadas. Combinado com outros dados do sensor, como pressão do ar e localização derivada de GPS, o software pode construir uma imagem detalhada de seus movimentos e estimar as calorias queimadas.
Juntando tudo:fusão de sensores e software
Como discutimos, a fim de maximizar a precisão e utilidade dos dados de movimento, não é suficiente simplesmente produzir um feed de dados brutos. Os dispositivos precisam processar os dados, compensar as imprecisões sistemáticas, bem como combinar informações de vários sensores.
Há muito o que aprender aqui. A fusão do sensor é complicado, e requer um certo know-how para obter os melhores resultados em uma embalagem pequena. No entanto, existem vários produtos disponíveis que integram os sensores e processamento necessários - por exemplo, o BNO080 / 085, desenvolvido por uma parceria entre a Bosch e a CEVA Hillcrest Labs, inclui um acelerômetro de alto desempenho, magnetômetro e giroscópio, bem como um baixo -power 32-bit ARM Cortex M0 + MCU.
O software de hub de sensor MotionEngine ™ da Hillcrest Labs, que é pré-programado no BNO085, oferece rastreamento de movimento de 6 e 9 eixos, bem como recursos inteligentes, como classificação da atividade do usuário, como caminhar, correr e ficar em pé (Figura 3). O hub de sensor MotionEngine é compatível com as principais arquiteturas de processamento embarcado e sistemas operacionais, com versões especializadas disponíveis para audíveis, smart TV, robótica, computação móvel, controles remotos, aplicativos móveis de baixa potência e muito mais.
clique para ver a imagem em tamanho real
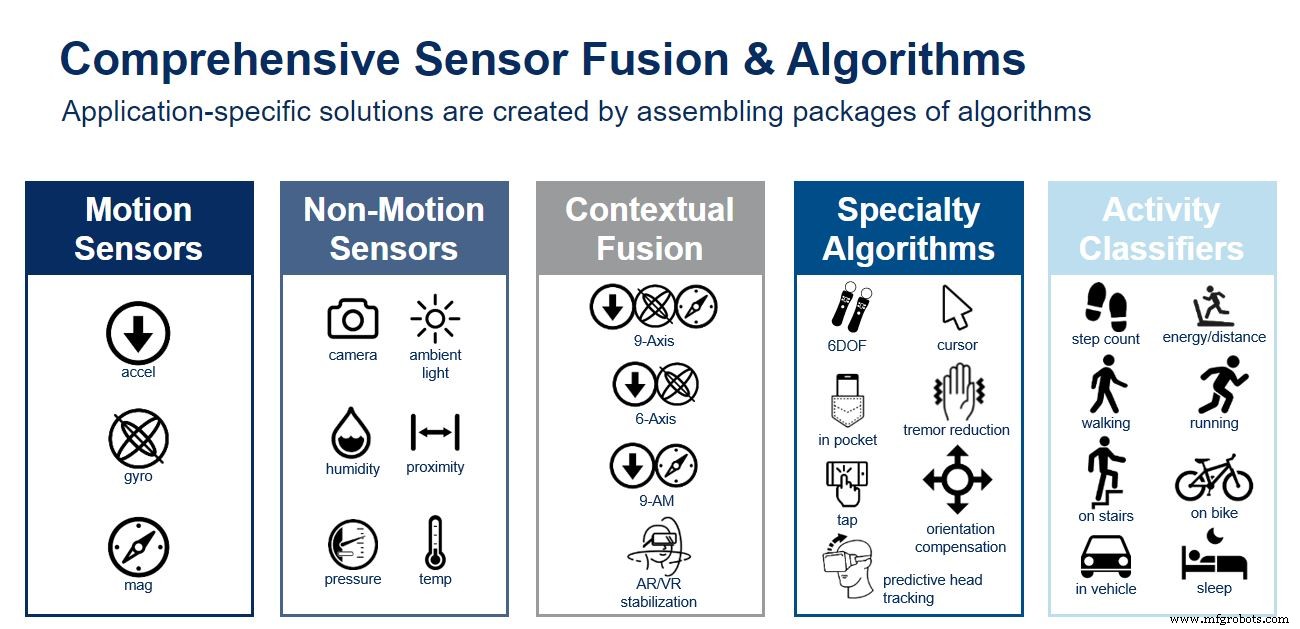
Figura 3:Fusão e Algoritmos de Sensor Abrangentes (Fonte:CEVA)
Reunir todos esses dados, em tempo real, pode ser desafiador e requer uma quantidade não trivial de desempenho de processamento. Pode ser melhor escolher sensores integrados que executem alguns desses algoritmos em um núcleo MCU no próprio dispositivo sensor, em vez de exigir um processador de aplicativo principal para realizar essas tarefas. Em particular, para tarefas "sempre ativas", como contagem de passos, se pudermos evitar acordar o processador principal toda vez que um movimento for detectado, ele pode permanecer em modo de espera - reduzindo assim o consumo geral de energia e aumentando a vida útil da bateria. Para voltar à nossa analogia anterior, um SiP com foco na fusão de sensores é como ter um vice-presidente lidando com certas decisões para que o presidente, o processador principal, possa se concentrar em tarefas mais imediatas.
Conclusões
Os sensores de movimento desempenham um papel importante em muitas aplicações, mas nem sempre é óbvio como escolher o dispositivo certo e como atingir o grau de precisão necessário para sua aplicação - ou até mesmo quão preciso você precisa ser. Diferentes casos de uso requerem diferentes níveis de precisão e possuem diversos requisitos para o tipo de dados necessários.
Sensores integrados e fusão de sensores podem frequentemente fornecer uma solução para esse problema. Ao trabalhar com um fornecedor adequado, você pode garantir que não compromete a obtenção de dados precisos e confiáveis, bem como recursos de valor agregado para aplicativos específicos - enquanto mantém o custo e o consumo de energia ao mínimo.
Integrado
- Rastreamento ADC
- Entrevista com especialista:Jonathan Warbrick da Fabricação de aditivos de grafite sobre como alcançar o sucesso com a impressão 3D
- O futuro é… Colaboração
- ST:sensor de movimento com aprendizado de máquina para rastreamento de atividade de alta precisão e com economia de bateria
- Sensores de movimento suportam requisitos de tolerância a falhas
- Rastreamento Raspberry Pi Ball
- Sensor de movimento usando Raspberry Pi
- Tecnologia de movimento linear
- Sistema de rastreamento de movimento 3D para tecnologia autônoma
- Emblemas na PwC