


Eletrônica vestível em forma de fio totalmente elástica com base em borracha para coleta de energia por movimento humano e rastreamento biomecânico autônomo
Resumo
O desenvolvimento de eletrônicos inteligentes extensíveis atraiu grandes atenções devido às suas aplicações potenciais em sistemas de coleta de energia de movimentos humanos e tecnologias de rastreamento biomecânico autoalimentado. Aqui, apresentamos um novo nanogerador triboelétrico em forma de fio totalmente esticável à base de borracha (TENG) composto de microesferas de vidro revestidas de prata / borracha de silicone como o fio condutor esticável (SCT) e o SCT revestido de borracha de silicone (SSCT) como o outro segmento triboelétrico. O TENG (SATT) em forma de rosca elástica, totalmente à base de borracha, gera uma tensão de circuito aberto de 3,82 V e uma corrente de curto-circuito de 65,8 nA sob a tensão de 100% e pode responder a diferentes estados de movimento do dedo. Além disso, o tecido inteligente com alimentação própria (SPST) tecido pelas unidades SCT e SSCT tem dois tipos de mecanismos de trabalho sobre os modos de liberação por estiramento e separação de contato. A interação de alongamento-liberação entre unidades de tricô pode gerar uma tensão de circuito aberto de 8,1 V e corrente de curto-circuito de 0,42 μA, e o modo de separação por contato ocorre entre algodão e dois tipos de material fora do SPST produzindo pico de tensão de 150 V e corrente de pico de 2,45 μA. Para provar as aplicações promissoras, o dispositivo SPST é capaz de fornecer energia elétrica para produtos eletrônicos comerciais e eliminar com eficácia a energia biomecânica completa dos movimentos das articulações humanas. Portanto, este trabalho fornece uma nova abordagem nas aplicações de eletrônicos vestíveis extensíveis para geração de energia e rastreamento autoalimentado.
Introdução
Eletrônicos vestíveis com conforto, suavidade e respirabilidade integrados em têxteis ou roupas têm sido amplamente utilizados em muitos campos, como monitores biomédicos [1,2,3], biônicos-robôs [4,5,6], interfaces humano-interativas [ 7, 8], eletrônicos militares e de consumo [9,10,11], que é a personificação perfeita do avanço da tecnologia e traz muitas conveniências e vantagens para nossa vida. No entanto, para alimentar esses eletrônicos vestíveis, as baterias e supercapacitores tradicionais são difíceis de atender às suas necessidades de energia devido aos gargalos técnicos de rigidez estrutural, vida útil limitada, peso extra do dispositivo e poluição ambiental. Consequentemente, é um problema urgente explorar uma fonte de alimentação sustentável recentemente para eletrônicos vestíveis. Para aplicações vestíveis, a energia mecânica do movimento humano é onipresente e relativamente estável, que deve ser convertida em eletricidade pela eletrônica vestível em operação, desenvolvendo-se em um dispositivo eletrônico multifuncional autoalimentado sustentável [12, 13]. Portanto, é um método promissor para usar a tecnologia de coleta de energia mecânica do movimento humano para obter um dispositivo vestível com alimentação própria, que poderia converter os sinais medidos em sinais de fonte de alimentação.
Dentre as várias abordagens, os nanogeradores triboelétricos (TENGs) [14,15,16,17] com base na eletrificação triboelétrica e indução eletrostática podem eliminar com eficiência a energia mecânica dos movimentos humanos, que é considerada uma energia sustentável ou um sensor autoalimentado devido ao peso leve , custo-benefício, alta eficiência, robustez e ampla seleção de materiais. Recentemente, o desenvolvimento de TENGs em forma de fio atuando como eletrônicos vestíveis com alimentação própria demonstrou seus méritos no monitoramento de sinais fisiológicos humanos, incluindo detecção de movimentos corporais, detecção tátil da pele, teste de frequência de pulso, etc. Hongzhi Wang entregou um sensor semelhante a fio com - em projeto de estrutura ondulada para detectar e discriminar os movimentos articulares de corpos humanos [18]; no entanto, a elasticidade do sensor é um obstáculo crítico em movimentos complexos de membros com grande tensão. Além disso, a eletrônica têxtil inteligente composta pelos TENGs em forma de fio mostraram suas vantagens nos sistemas de coleta de energia dos movimentos humanos, devido à fácil integração com as roupas. Wang e colegas de trabalho costuraram o tecido inteligente vestível em uma vestimenta para se tornar um tecido poderoso [19] ou realizaram os têxteis TENG com base no método de fios de tecelagem bem projetado [20]; no entanto, o desempenho estável de alto rendimento ainda é um problema desafiador para aplicações práticas. Além disso, a maioria dos eletrodos extensíveis em eletrônicos vestíveis anteriores são obtidos por folhas de metal em serpentina [21, 22], deposição em substrato macio pré-tensionado [23, 24] e nanofios de metal [25], obstruindo os eletrônicos têxteis inteligentes para tolerar o uso de desgaste e fabricação em grande escala.
Aqui, a fim de resolver os problemas acima, apresentamos um novo tipo de SATT com estrutura de dupla hélice, consistindo em "microesferas de vidro revestidas de prata / borracha de silicone" como o fio SCT e "SCT revestido de borracha de silicone" como o SSCT fio. Devido à boa compatibilidade do material de matriz de elastômero ultra-extensível, o SATT pode facilmente obter uma alta elasticidade de 100% para realizar montagem conformada em sistemas eletrônicos extensíveis. O SATT com comprimento de 5 cm gera uma tensão de saída de 3,82 V e uma corrente de saída de 65,8 nA, que pode atuar como um sensor ativo vestível para rastrear os estados de movimento do dedo. Além disso, o SPST tecido pelas unidades SCT e SSCT gera a tensão de saída de 8,1 V e corrente de 0,42 μA no modo de liberação de estiramento e a potência máxima pode atingir até 163,3 μW no modo de separação de contato. Assim, o SPST é capaz de fornecer energia elétrica para eletrônicos comerciais para manter o estado de operação normal, enquanto isso pode efetivamente colher energia biomecânica de alcance total dos movimentos das articulações humanas, proporcionando um grande significado para promover o desenvolvimento de coletores de energia flexíveis e vestíveis práticos.
Métodos
Fabricação do SCT
As microesferas de vidro revestidas de prata (Shenzhen Xiate Science and Technology Co. Ltd., China) foram dispersas uniformemente em uma matriz de borracha de silicone sólida (TN-920) com uma razão de peso de 3:1 por 1,5 h. Em seguida, a mistura foi colocada em uma extrusora de parafuso para realizar o processo de extrusão e vulcanização a 110 ° C e foi obtido o fio compósito condutor com diâmetro de 1 mm. Os cinco fios condutores extensíveis foram selecionados para serem enrolados juntos e ambas as extremidades foram revestidas pela borracha de silicone misturada (Ecoflex 00-30) e agente de cura em uma proporção de massa de 1:1. Finalmente, foi colocado em um forno de secagem a vácuo evacuado por 20 min e aquecido por 2 h a 80 ° C. Depois de curar e moldar, o SCT pode ser realizado como um eletrodo composto elástico.
Fabricação do SSCT
O SCT foi colocado no molde com 4 mm de diâmetro. Em seguida, a mistura da borracha de silicone (Ecoflex 00-30) com o agente de cura foi injetada no molde. Após evacuação e aquecimento, o SSCT foi preparado por meio da tecnologia de desmoldagem.
Sistema de medição
As amostras foram caracterizadas por microscopia eletrônica de varredura por emissão de campo (ZEISS EVO18, Carl Zeiss Jena, Alemanha). Os desempenhos de tensão e corrente de saída foram registrados por um eletrômetro de sistema KEITHLEY 2611B.
Resultados e discussão
O SATT consiste em dois fios de dupla hélice totalmente à base de borracha:um é o SCT usando microesferas de vidro revestidas de prata uniformemente dispersas na matriz de borracha de silicone, e o outro é o SSCT usando o SCT revestido de borracha de silicone. O processo de fabricação detalhado da SATT é ilustrado na Fig. 1a. As microesferas de vidro revestidas de prata (75% em peso) foram misturadas à borracha de silicone ultra-elasticidade pelo processo de mistura, que foi subsequentemente extrudado e vulcanizado através da máquina de extrusão de parafuso para obter o fio compósito condutor (Fig. 1a I). Em seguida, os cinco fios condutores elásticos foram selecionados para serem enrolados juntos, usados como eletrodo SCT, e as extremidades dos fios foram amarradas para evitar a torção durante a fabricação subsequente (Fig. 1a (II)). Considerando a forte capacidade de ganhar elétrons, a borracha de silicone com propriedades mecânicas superiores foi cuidadosamente escolhida como um material de embrulho para encapsular o eletrodo. Ou seja, o SSCT foi preparado e considerado como o outro fio triboelétrico (Fig. 1a (III)). Finalmente, o SCT e o SSCT foram entrelaçados um com o outro para formar um TENG alongado, resistente ao desgaste e de baixo custo em forma de rosca totalmente à base de borracha com estrutura de dupla hélice (Fig. 1a (IV)). A imagem de microscopia eletrônica de varredura transversal (SEM) de SSCT é mostrada na Fig. 1b. É óbvio que as cinco roscas condutoras são revestidas firmemente por borracha de silicone para obter uma estrutura tudo-em-um visando mais cargas induzidas ocorrendo nas roscas condutoras internas. Como mostrado na Fig. 1c, d, as microesferas de vidro revestidas de prata com diâmetros diferentes estão intimamente embutidas em borracha de silicone, o que poderia aparecer como estrutura de rede condutora tridimensional na matriz de borracha. Conseqüentemente, o SCT tem uma propriedade excepcionalmente condutiva e uma notável capacidade de alongamento. Para demonstrar ainda mais a boa compatibilidade da matriz orgânica homogênea, as imagens SEM do ampliado na posição de conexão entre SCT e borracha de silicone revestida são mostradas na Fig. 1e, f. Aparentemente, não há lacuna entre os fios condutores e a borracha de silicone revestida, de modo que são implementadas uma estrutura integrada bem projetada. A Figura 1g exibe o SATT resultante com fios de eliminação de energia de dupla hélice, e a imagem inferior da Fig. 1g mostra a elasticidade do SATT. O resultado apresenta que o TENG em forma de fio pode ser alongado até ≈ 100%, o que é muito superior aos relatórios anteriores sobre TENG baseado em fio [26,27,28].
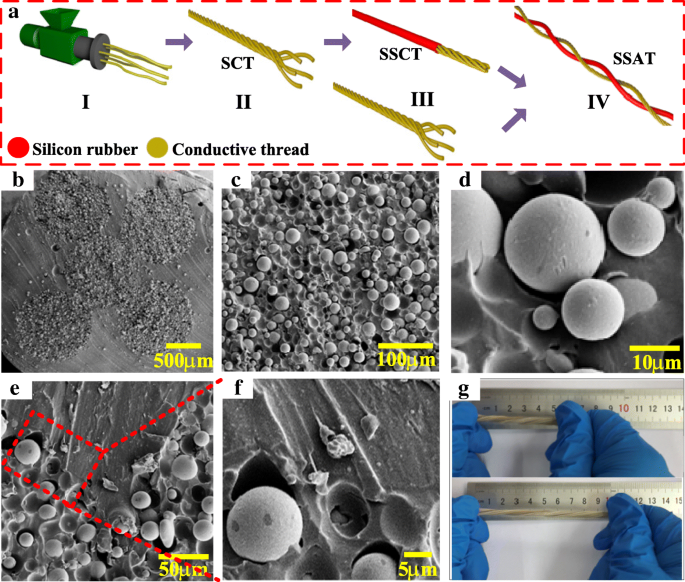
a Diagrama esquemático para o processo de fabricação do dispositivo SATT. b - d A imagem SEM da vista de seção transversal SSCT em diferentes ampliações. e , f A imagem SEM da posição de conexão entre o SCT e a borracha de silicone revestida em diferentes ampliações. g Fotografias do SATT preparado com demonstrações de ser esticado a ≈ 100% de deformação.
Apesar de fabricado por uma estrutura de dupla hélice complexa, o SATT pode ser aproximado como um grande número de capacitores conectados em paralelo sem considerar o efeito de borda. Assim, o mecanismo de trabalho do SATT poderia ser simplificado no processo de separação de contato típico entre o SCT e o SSCT nos ciclos de alongamento-liberação. O mecanismo de geração de eletricidade da SATT com base nos efeitos de acoplamento de eletrificação de contato e indução eletrostática é representado na Fig. 2a. No estado original, a superfície da borracha de silicone recebe as cargas negativas, enquanto uma carga positiva equivalente é gerada no eletrodo, respectivamente, devido à eletrificação de contato. Quando uma tensão de tração é aplicada ao SATT, a distância entre a superfície de silicone e o eletrodo aumenta e causa uma diferença de potencial elétrico. Os elétrons fluem entre dois eletrodos através dos circuitos externos, resultando na formação de uma corrente elétrica. Até que a distância esteja bem longe, há um estado de equilíbrio de elétrons interrompendo a transferência. Quando a tensão de tração é liberada, os elétrons fluem inversamente entre os eletrodos para realizar um equilíbrio de carga. Depois que a SATT é totalmente restaurada ao estado original, as cargas são completamente neutralizadas novamente. Assim, o SATT poderia gerar energia elétrica de saída nos movimentos periódicos de alongamento-liberação contínuos.
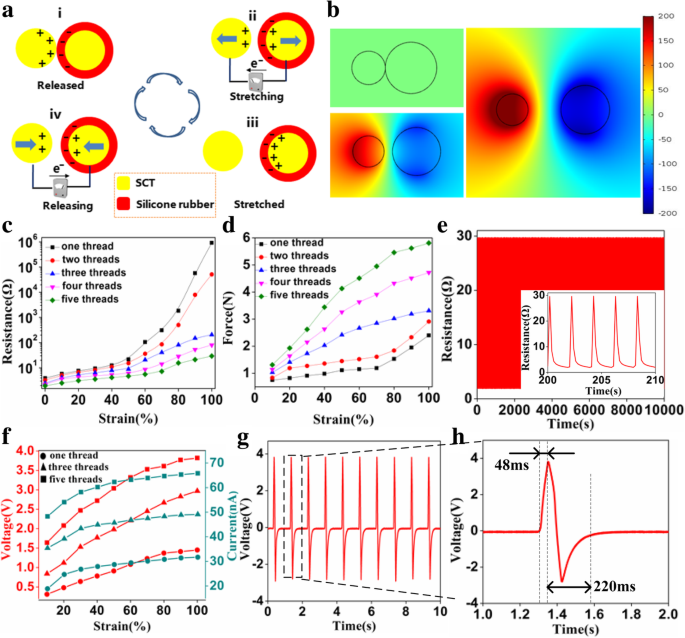
a Mecanismo de geração de energia do SATT no processo de alongamento-liberação. b Os resultados da simulação das distribuições potenciais usando o software COMSOL. c As resistências de fios condutores com comprimento de 5 cm em diferentes montagens de tensão. d A força de tração experimentada por diferentes números de fios condutores em função da quantidade de deformação. e O teste de resistência à tração do SCT dentro de 100% de deformação. f As tensões e correntes de saída de fios condutores em diferentes montagens de deformação. g A tensão de circuito aberto do SATT com um comprimento de 5 cm a 100% de deformação. h Visão ampliada da área indicada pela caixa preta tracejada no painel g
Além disso, estabelecemos uma simulação de método de elementos finitos (FEM) com base no software COMSOL para analisar quantitativamente o mecanismo de trabalho do SATT. Neste modelo, as duas densidades de tribo-carga de ± 1μC / m 2 são atribuídos nas superfícies da rosca. É importante notar que a quantidade de cargas iniciais nas superfícies da rosca afeta apenas o potencial elétrico calculado; no entanto, a tendência de mudança relativa do potencial elétrico será invariável. A Figura 2b mostra as distribuições de potencial elétrico do SATT em diferentes forças de tração. Quando a força alongada externa não existe, a diferença de potencial de todo o dispositivo é quase zero. À medida que o SATT é estendido para fora, as tribo-cargas positivas e negativas são separadas e a diferença de potencial aumenta. Consequentemente, fica evidente que os resultados da simulação pelo software COMSOL são consistentes com o processo de análise teórica do mecanismo de trabalho acima.
Para eletrodo confortavelmente elástico, a condutividade elétrica é um fator adequadamente importante. O eletrodo em forma de fio extensível proposto com microesferas de vidro revestidas de prata dispersas em elastômero de borracha de silicone é esticado em diferentes deformações para causar condutividade elétrica variada. É necessário estudar sistematicamente a relação entre o número de fios condutores, o comprimento do trecho e a resistência do eletrodo. A Figura 2c mostra as resistências de um a cinco fios condutores com um comprimento de 5 cm em diferentes montagens de deformação. Dentro da faixa de 50% de deformação, as resistências dos eletrodos com diferentes números de fios condutores são quase inalteradas sob o processo de alongamento e liberação. No entanto, com o aumento da quantidade de tensão, quanto maior o número de fios condutores, menor o valor de resistência do eletrodo. A Figura 2d mostra a força de tração experimentada por diferentes números de fios condutores em função da quantidade de deformação. Obviamente, a força de tração aumentará conforme o número de fios condutores aumenta. Por serem mais fáceis de serem estimulados pela força de tração, os cinco fios condutores entrelaçados são selecionados como o eletrodo SCT neste trabalho. A durabilidade de tração do SCT dentro de 100% de deformação foi realizada, conforme mostrado na Fig. 2e. Os resultados indicam que o SCT é um excelente elastômero condutor, exibindo especialmente uma reversibilidade altamente estável. Além disso, os desempenhos de saída elétrica dos fios sequestradores de energia de dupla hélice foram realizados, como mostrado na Fig. 2f. Conforme o número crescente de fios condutores, as áreas de contato entre o eletrodo e a borracha de silicone são aumentadas, resultando em mais cargas transferidas entre os fios triboelétricos sob os movimentos de alongamento-liberação. Consequentemente, tanto a tensão de circuito aberto de saída quanto a corrente de curto-circuito aumentam. A Figura 2g apresenta que o SATT com comprimento de 5 cm pode gerar a tensão de circuito aberto de 3,82 V e a corrente de curto-circuito de 65,8 nA com 100% de deformação. A visão ampliada de um ciclo de tensão é mostrada na Fig. 2h. Vale ressaltar que os tempos de resposta e recuperação do SATT composto por SCT e SSCT são de 48 ms e 220 ms a 1 Hz, respectivamente. Consequentemente, espera-se que o SATT seja usado como um sensor de tração eletrônico com alimentação própria para monitorar sinais fisiológicos humanos.
A energia mecânica dos movimentos humanos tem sido os recursos energéticos mais usados devido às suas várias vantagens, como universalidade, renovabilidade e estabilidade. Têxteis e roupas inteligentes que coletam a energia mecânica dos movimentos humanos têm sido amplamente pesquisados [29,30,31]. No entanto, devido à falta de excelente elasticidade, o conforto dos têxteis inteligentes baseados nas tiras flexíveis é um fator extremamente importante que impede o desenvolvimento de tecidos inteligentes. Em vista da excelente característica elástica do dispositivo SATT, um tecido autônomo leve, confortável e usável é apresentado aqui. As unidades SCT e SSCT foram tecidas em SPST com tecido simples tradicional. A ilustração esquemática e a fotografia do dispositivo SPST (5 × 7 cm 2 ) são demonstrados na Fig. 3a, b. É importante notar que os movimentos biológicos são normalmente considerados como alongados em 5–30% de deformação, o que requer uma compatibilidade de deformação muito maior da eletrônica vestível para garantir uma operação estável a longo prazo sob tensão mecânica [32,33,34]. A Figura 3c apresenta o gráfico esquemático de alongamento da deformação intencionalmente alongada de 100% do dispositivo SPST usando um motor linear. O mecanismo de trabalho de liberação de alongamento do SPST é o mesmo do SATT, pois o foco é conectar todos os terminais STC como a porta de teste e os eletrodos no SSTC juntos como a outra porta de teste. A tensão de circuito aberto e a corrente de curto-circuito do dispositivo SPST são de cerca de 8,1 V e 0,42 μA no processo de excitação de liberação de alongamento, respectivamente (Fig. 3d, e). Devido à alta elasticidade e desempenho de saída estável, o SPST poderia atuar como um dispositivo de monitoramento autoalimentado para limpar a energia cinética de alongamento para as articulações humanas.
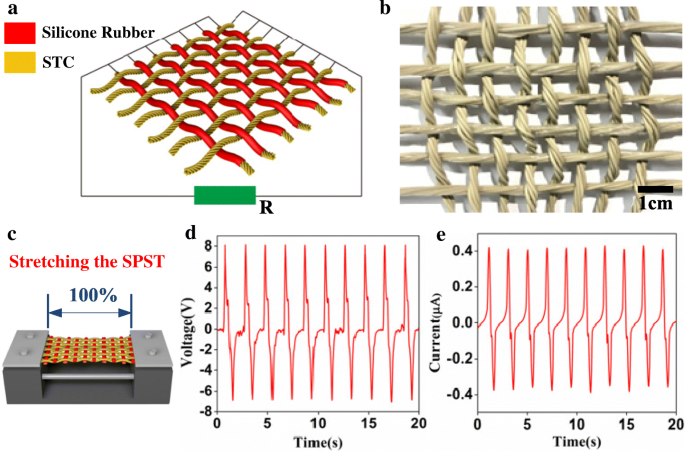
a A ilustração esquemática do SPST. b A imagem fotográfica do SPST. c O gráfico esquemático de alongamento do SPST na deformação 100%. d A tensão de saída e e corrente de saída do SPST nos ciclos periódicos de alongamento-liberação
Além disso, considerando que o dispositivo SPST aparece no processo de separação por contato com outros tecidos de roupas durante os movimentos humanos reais, os desempenhos de saída com batimento de algodão SPST foram alcançados no processo de batimento periódico do motor linear (Fig. 4a). O mecanismo de geração de eletricidade com vazamento de algodão SPST é ilustrado na Fig. 4b. Nos ciclos de vazamento periódicos, o modo de separação por contato ocorre entre o algodão e os dois tipos de material fora do SPST. Assim, as cargas de indução eletrostática fluem entre os eletrodos do SPST. A Figura 4c, d exibe as tensões de circuito aberto e correntes de curto-circuito sob a força de 100 N. Notavelmente, a tensão de circuito aberto do SPST é de cerca de 150 V em diferentes frequências de derivação, que é independente da frequência de operação. No entanto, as correntes de curto-circuito do SPST são cerca de 0,96, 1,31, 1,55, 1,77 e 2,45 μA com frequências de 0,5, 1, 1,5, 2 e 3 Hz, respectivamente. Isso ocorre porque o tempo para a separação do contato torna-se mais curto conforme as frequências mais altas, de modo que o número igual de cargas causa uma corrente maior (Isc =dQsc / dt). Além disso, o SPST agia como um dispositivo de fornecimento de energia normalmente conectado à carga externa em aplicações práticas. Arquivo adicional 1:A Figura S1 apresenta as tensões de saída em função das resistências de carga externa de 1 MΩ a 1 GΩ. As potências de saída do SPST conectado a cargas externas com vários níveis podem ser obtidas, uma vez que a potência de saída é definida por U 2 / R. Claramente, a potência de saída aumenta primeiro e depois diminui, atingindo um valor máximo de 163,3 μW quando a resistência de carga externa é de cerca de 120 MΩ. Além disso, o teste de estabilidade do SPST foi conduzido por 10.000 ciclos, conforme mostrado no Arquivo Adicional 1:Figura S2. Obviamente, a tensão de saída do SPST não diminuiu em ciclos de teste periódicos, portanto, o SPST tem uma longa vida útil notável. A eletricidade gerada a partir da derivação de algodão SPST pode ser armazenada nos capacitores para fornecer energia para eletrônicos vestíveis. A Figura 4e mostra que as curvas de carga de várias capacidades na frequência de 3 Hz e força de 100 N. A tensão de um capacitor de 0,47 μF pode ser carregada a 14 V por 150 s. Com a capacidade do capacitor aumentando, leva mais tempo para atingir a mesma alta tensão. Devido ao excelente desempenho de saída, o dispositivo SPST-algodão pode ligar diretamente os LEDs e ligar um relógio elétrico comercial com a energia elétrica armazenada no capacitor (Fig. 4f e Arquivo adicional 2:Vídeo S1, S2). Esses resultados apresentam que o dispositivo SPST pode fornecer energia elétrica para eletrônicos comerciais para manter a operação normal.
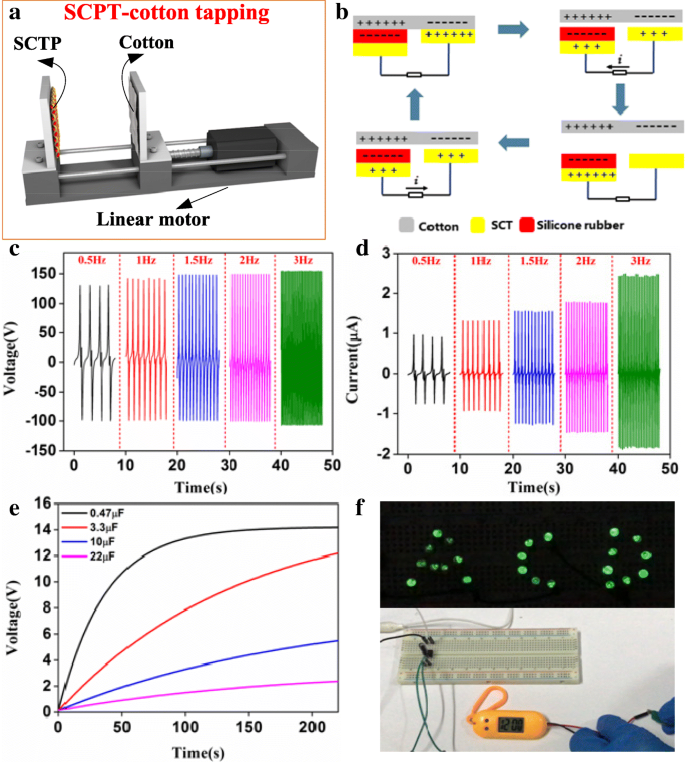
a A ilustração esquemática da batida de algodão SPST. b O mecanismo de geração de eletricidade com batimento de algodão SPST. c As tensões de circuito aberto e d correntes de curto-circuito com batimento de algodão SPST em diferentes frequências de batimento. e Curvas de tensão medidas de vários capacitores na frequência de 3 Hz e força de 100 N. f Os LEDs e o relógio elétrico foram acionados pelo dispositivo SPST-algodão
Sendo extensível e fácil de ser montado na maioria das partes do corpo, o TENG em forma de rosca pode atuar como um dispositivo eletrônico vestível ativo para detectar os movimentos do corpo. Conforme mostrado na Fig. 5a e no arquivo adicional 2:Vídeo S3, o dispositivo SATT foi fixado na figura de índice de um sujeito para responder a cinco estados de movimento de flexão-liberação. Claramente, os picos de tensão de saída aumentam com o aumento da amplitude de movimento, ou seja, os sinais de monitoramento de saída são determinados pelas magnitudes dos movimentos de alongamento. Os comportamentos confirmam que o SATT pode ser usado como um sensor ativo autoalimentado sem uma fonte externa para caracterizar quantitativamente os estados de movimento do dedo. Além disso, as tensões de circuito aberto do SPST tecidas pelas unidades SCT e SSCT são estáveis e independentes da frequência de operação, que podem ser usadas como sinais de saída do monitoramento de movimento. Conforme mostrado na Fig. 5b, c, o SPST foi fixado nas articulações do corpo humano para realizar a captação de energia e o monitoramento das condições. Quando os comportamentos de flexão e extensão do cotovelo e joelho aparecem, o modo de liberação de alongamento do SPST e o modo de separação de contato do algodão SPST produzem, resultando nos sinais elétricos alternados gerados. Obviamente, o dispositivo SPST atende perfeitamente ao requisito sobre a propriedade elástica para têxteis inteligentes, e as tensões de saída podem atingir cerca de 105 V e 116,9 V nos ângulos de flexão máximos das articulações do cotovelo e joelho, respectivamente. As correntes de saída de resposta são cerca de 0,73 μA e 0,89 μA, respectivamente. Consequentemente, o SPST cuidadosamente projetado fornece um método de fornecimento de energia promissor para eletrônicos vestíveis, eliminando a energia de movimento das articulações do corpo e desempenhará um papel extremamente importante nas aplicações de treinamento de reabilitação de pacientes e atividade de trilha.
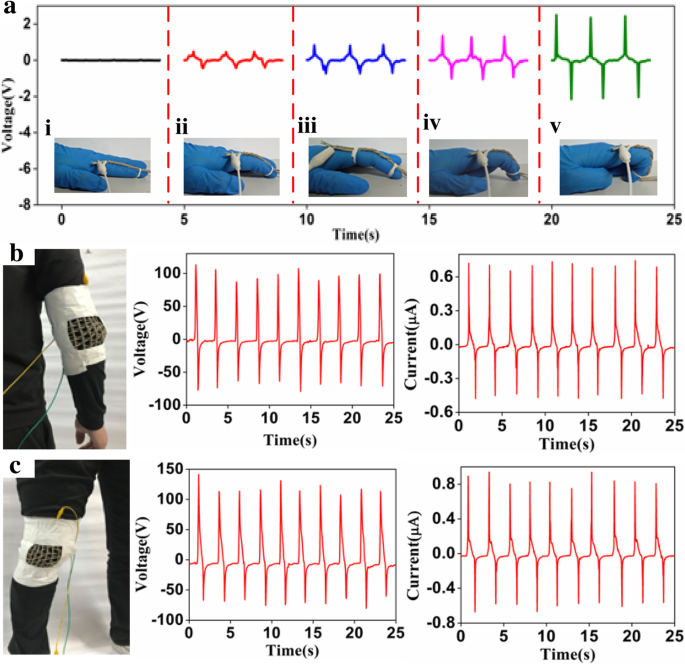
a O SATT como um sensor ativo autoalimentado para detectar estados de movimento do dedo. b O SPST é fixado no cotovelo c o joelho para realizar coleta de energia e monitoramento de condição
Conclusão
Em resumo, este artigo demonstra uma eletrônica vestível com formato de fio totalmente elástica e totalmente baseada em borracha, usando microesferas de vidro revestidas de prata e borracha de silicone como materiais de origem. O SATT com 100% de deformação pode converter energia mecânica de tração em energia elétrica por meio de efeito eletrostático e é demonstrado como um sensor autoalimentado para rastrear quantitativamente os movimentos da articulação do dedo. Além disso, os fios triboelétricos SCT e SSCT são tecidos em SPST com trama simples tradicional, o que gera a tensão de circuito aberto de 8,1 V e corrente de curto-circuito de 0,42 μA por meio da interação de liberação de estiramento entre unidades de tricô e a potência de saída máxima de 163,3 μW com resistência de carga externa de 120 MΩ na forma de rosqueamento de algodão SPST. Com o desempenho de tensão de saída estável e grande, o SPST foi identificado como uma fonte de alimentação eficaz para fornecer energia elétrica para eletrônicos comerciais. Sendo extensível e usável, o SPST fornece uma solução eficaz para coletar energia biomecânica dos movimentos das articulações humanas e deverá desenvolver um grande potencial nas aplicações de sistemas médicos e tecnologias de rastreamento inteligente com alimentação própria.
Disponibilidade de dados e materiais
Todos os dados gerados ou analisados durante este estudo estão incluídos neste artigo publicado e seus arquivos de informações complementares.
Abreviações
- SATT:
-
TENG em forma de rosca extensível totalmente à base de borracha
- SCT:
-
Rosca condutiva extensível
- SEM:
-
Microscopia eletrônica de varredura.
- SPST:
-
Têxtil inteligente com alimentação própria
- SSCT:
-
O SCT revestido com borracha de silicone
- TENG:
-
Nanogerador triboelétrico
Biossensor de transistor de efeito de campo de grafeno magnético para detecção de DNA de cadeia simples
Transparência induzida por plasma em uma estrutura Bowtie assimétrica
Nanomateriais
- Eletrônica do futuro:plataforma de desenvolvimento rápido para imagens térmicas e detecção de infravermelho
- Nanofibras e filamentos para entrega aprimorada de drogas
- Nanopartículas para terapia do câncer:progresso e desafios atuais
- Otimização de Filme Fino Altamente Refletivo para Micro-LEDs de Ângulo Total
- Supercapacitores elásticos miniaturizados e lineares de alta taxa
- Nanopartículas de albumina carregadas de resveratrol com circulação sanguínea prolongada e biocompatibilidade aprimorada para terapia de tumor pancreático direcionada altamente eficaz
- Sensor de gás vestível para monitoramento de saúde e meio ambiente
- Sistema de rastreamento de movimento 3D para tecnologia autônoma
- Conexões para Controle:Interfaces de Comunicação para Sensores de Posição e Movimento
- O dispositivo alimenta sensores vestíveis por meio do movimento humano