


As garras robóticas Kirigami são delicadas o suficiente para levantar gemas de ovos
Pesquisadores de engenharia da Universidade Estadual da Carolina do Norte demonstraram um novo tipo de garras robóticas flexíveis que são capazes de levantar gemas delicadas sem quebrá-las e que são precisas o suficiente para levantar um fio de cabelo humano. O trabalho tem aplicações tanto para robótica leve quanto para tecnologias biomédicas.
O trabalho baseia-se na arte do kirigami, que envolve cortar e dobrar folhas bidimensionais (2D) de material para formar formas tridimensionais (3D). Especificamente, os pesquisadores desenvolveram uma nova técnica que envolve o uso de kirigami para converter folhas 2D em estruturas 3D curvas, cortando fendas paralelas em grande parte do material. A forma final da estrutura 3D é determinada em grande parte pelo limite externo do material. Por exemplo, um material 2D que tem um limite circular formaria uma forma 3D esférica.
“Definimos e demonstramos um modelo que permite aos usuários trabalhar de trás para frente”, diz Yaoye Hong, primeiro autor de um artigo sobre o trabalho. “Se os usuários souberem de que tipo de estrutura 3D curvada eles precisam, eles podem usar nossa abordagem para determinar a forma do limite e o padrão de fendas que eles precisam usar no material 2D. O controle adicional da estrutura final é possível controlando a direção na qual o material é empurrado ou puxado.”
Nossa técnica é um pouco mais simples do que as técnicas anteriores para converter materiais 2D em estruturas 3D curvas e permite que os designers criem uma ampla variedade de estruturas personalizadas a partir de materiais 2D”, disse o professor Jie Yin.
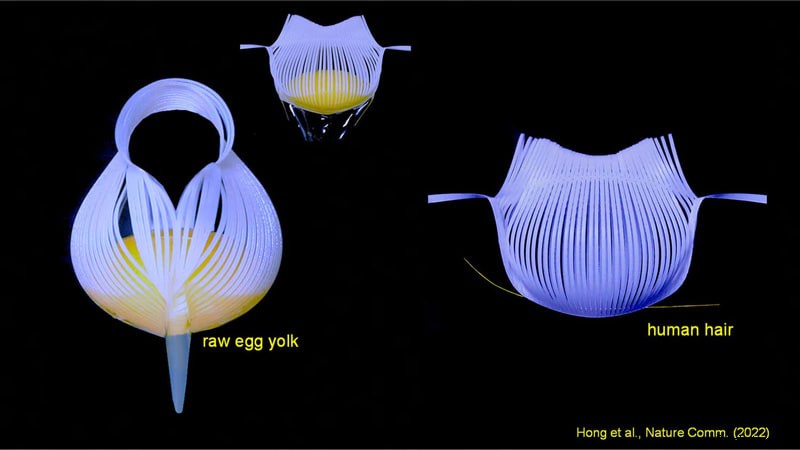
Os pesquisadores demonstraram a utilidade de sua técnica criando garras capazes de agarrar e levantar objetos que vão desde gemas de ovos até cabelos humanos.
“As garras convencionais seguram um objeto com firmeza – elas agarram as coisas pressionando-as”, disse Yin. “Isso pode causar problemas ao tentar segurar objetos frágeis, como gemas de ovos. Mas nossas garras essencialmente cercam um objeto e depois o levantam – semelhante à maneira como colocamos nossas mãos em torno de um objeto. Isso nos permite ‘agarrar’ e mover até objetos delicados, sem sacrificar a precisão.”
No entanto, os pesquisadores observam que há uma série de outras aplicações potenciais, como usar a técnica para projetar tecnologias biomédicas que se adaptam à forma de uma articulação – como o joelho humano.
“Pense em bandagens inteligentes ou dispositivos de monitoramento capazes de dobrar e se mover com o joelho ou cotovelo”, disse Yin. “Este é um trabalho de prova de conceito que mostra que nossa técnica funciona. Estamos agora no processo de integração dessa técnica em tecnologias de robótica leve para enfrentar os desafios industriais. Também estamos explorando como essa técnica pode ser usada para criar dispositivos que possam ser usados para aplicar calor ao joelho humano, o que teria aplicações terapêuticas”.
Robô operado por joystick pode ajudar cirurgiões a tratar derrames remotamente
Engenheiros trazem um toque suave à robótica comercial
Sistema de controle de automação
- Garras do robô montadas nos EUA
- O padrão ETSI IoT:os reguladores estão fazendo o suficiente para proteger os dispositivos IoT?
- Opinião:ferramentas robóticas de ponta de braço estão moldando a indústria de manufatura
- OnRobot lança sistema de lixamento robótico
- Bobacino lança bar de chá robótico
- Práticas recomendadas de gerenciamento de cabos robóticos
- O que são disjuntores inteligentes?
- Sensor de força/torque aumenta a versatilidade robótica
- Você está pronto para o cobot?
- O que são Cobots (robôs colaborativos)?