


Motores Selsyn (Synchro)
Normalmente, os enrolamentos do rotor de um motor de indução do rotor enrolado entram em curto após a partida. Durante a partida, a resistência pode ser colocada em série com os enrolamentos do rotor para limitar a corrente de partida. Se esses enrolamentos estiverem conectados a uma resistência de partida comum, os dois rotores permanecerão sincronizados durante a partida.
Isso é útil para impressoras e pontes levadiças, onde dois motores precisam ser sincronizados durante a partida. Uma vez iniciado e os rotores em curto, o torque de sincronização está ausente. Quanto maior for a resistência durante a partida, maior será o torque de sincronização para um par de motores.
Se os resistores de partida forem removidos, mas os rotores ainda estiverem em paralelo, não há torque de partida. No entanto, há um torque de sincronização substancial. Isso é chamado de selsyn , que é uma abreviatura de “self synchronous”.
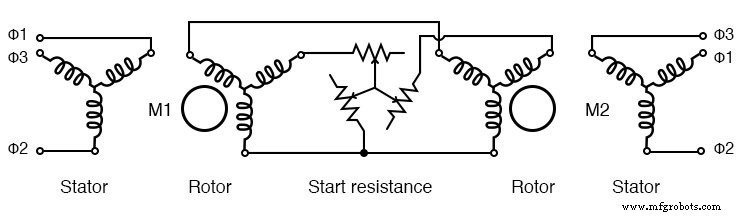
Partindo motores de indução de rotor enrolado de resistores comuns
Os rotores podem estar estacionários. Se um rotor for movido por um ângulo θ, o outro eixo selsyn se moverá por um ângulo θ. Se o arrasto for aplicado a um selsyn, isso será sentido ao tentar girar o outro eixo.
Embora existam selsyns com vários cavalos de força (vários quilowatts), a principal aplicação são pequenas unidades de alguns watts para aplicações de instrumentação - indicação remota de posição.
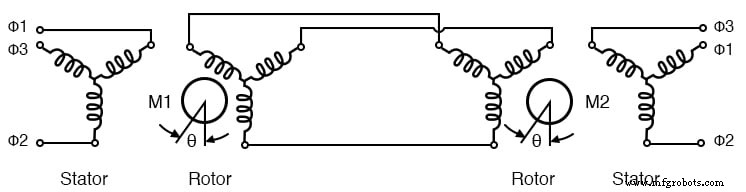
Selsyns sem resistência inicial
Os selsyns de instrumentação não têm uso para resistores de partida (figura acima). Eles não se destinam a rodar automaticamente. Uma vez que os rotores não estão em curto nem com o resistor carregado, nenhum torque de partida é desenvolvido.
No entanto, a rotação manual de um eixo irá produzir um desequilíbrio nas correntes do rotor até que o eixo da unidade paralela siga. Observe que uma fonte comum de energia trifásica é aplicada a ambos os estatores. Embora mostremos rotores trifásicos acima, um rotor alimentado por uma fase é suficiente, conforme mostrado na figura abaixo.
Transmissor - Receptor
Pequenos selsyns de instrumentação, também conhecidos como synchros , usa rotores monofásicos em paralelo e energizados por CA, retendo os estatores trifásicos em paralelo, que não são energizados externamente. Abaixo, é mostrada a função dos sincronizadores como transformadores rotativos.
Se os rotores de ambos transmissor de torque (TX) e receptor de torque (RX) estão no mesmo ângulo, as fases das tensões induzidas do estator serão idênticas para ambos, e nenhuma corrente fluirá.
Se um rotor for deslocado do outro, as tensões da fase do estator serão diferentes entre o transmissor e o receptor. A corrente do estator fluirá desenvolvendo torque. O eixo do receptor é escravizado eletricamente ao eixo do transmissor. O eixo do transmissor ou receptor pode ser girado para girar a unidade oposta.
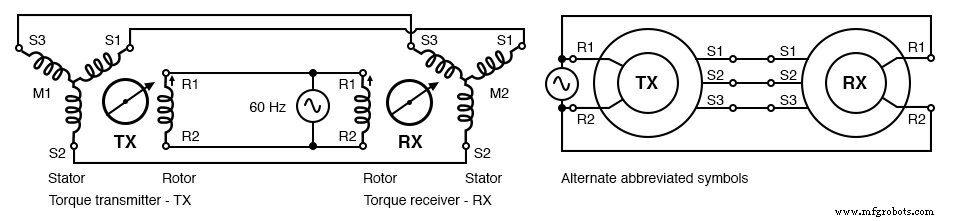
Os sincronizadores têm rotores monofásicos
Os sincronizadores são enrolados com enrolamentos trifásicos trazidos para os terminais externos. O enrolamento de rotor único de um transmissor ou receptor de torque é trazido por anéis coletores escovados. Os transmissores e receptores sincronizados são eletricamente idênticos.
No entanto, um receptor sincro possui amortecimento inercial embutido. Um transmissor de torque síncrono pode ser substituído por um receptor de torque.
O sensoriamento remoto de posição é a principal aplicação do sincronismo. Por exemplo, um transmissor sincro acoplado a uma antena de radar indica a posição da antena em um indicador em uma sala de controle.
Um transmissor sincro acoplado a um cata-vento indica a direção do vento em um console remoto. Os sincronizadores estão disponíveis para uso com alimentação de 240 Vca 50 Hz, 115 Vca 60 Hz, 115 Vca 400 Hz e 26 Vca 400 Hz.
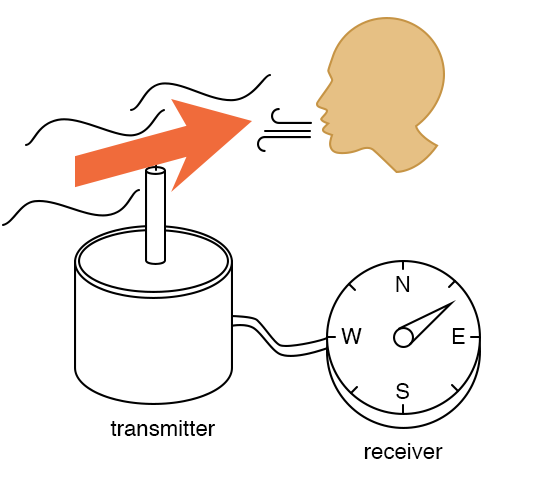
Aplicativo de sincronização:indicação de posição remota
Transmissor-receptor diferencial
Um transmissor diferencial sincronizado (TDX) tem rotor e estator trifásicos. Um transmissor diferencial síncrono adiciona uma entrada de ângulo do eixo a uma entrada de ângulo elétrico nas entradas do rotor, gerando a soma nas saídas do estator.
Este ângulo elétrico do estator pode ser exibido enviando-o para um RX. Por exemplo, um receptor sincronizado exibe a posição de uma antena de radar em relação à proa de um navio. A adição de um rumo da bússola do navio por um transmissor diferencial sincronizado exibe a posição da antena em um RX em relação ao norte verdadeiro, independentemente do rumo do navio.
Inverter o par S1-S3 de cabos do estator entre um TX e TDX subtrai as posições angulares.
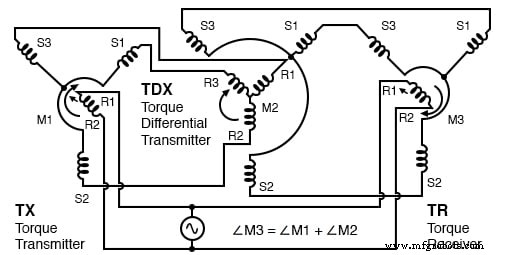
Transmissor de diferencial de torque (TDX)
Uma antena de radar de bordo acoplada a um transmissor sincronizado codifica o ângulo da antena em relação à proa do navio (figura abaixo). É desejável exibir a posição da antena em relação ao norte verdadeiro.
Precisamos adicionar os navios indo de uma bússola giratória para a posição da antena relativa à proa para exibir o ângulo da antena em relação ao norte verdadeiro (∠antena + ∠gyro).
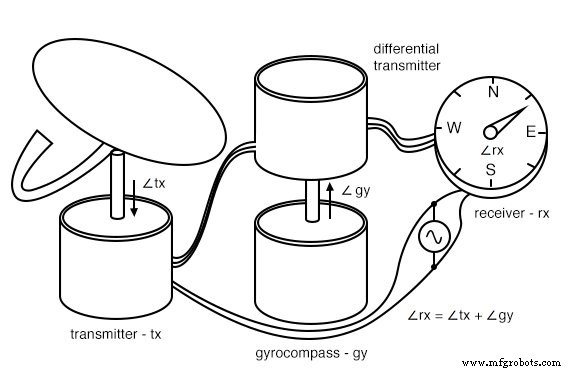
Aplicação do transmissor de diferencial de torque:adição angular
∠antena-N =∠antena + ∠gyro ∠rx =∠tx + ∠gy
Por exemplo, o rumo do navio é ∠30 °, a posição da antena em relação à proa do navio é ∠0 °, ∠antenna-N é:
∠rx =∠tx + ∠gy ∠30 ° =∠30 ° + ∠0 °
Exemplo, o rumo do navio é ∠30 °, a posição da antena em relação à proa do navio é ∠15 °, ∠antenna-N é:
∠45 ° =∠30 ° + ∠15 °
Adição vs subtração
Para referência, mostramos os diagramas de fiação para subtração e adição de ângulos de eixo usando ambos TDX (transmissor de diferencial de torque) e TDR (receptor de diferencial de torque). O TDX tem uma entrada de ângulo de torque no eixo, uma entrada de ângulo elétrico nas três conexões do estator e uma saída de ângulo elétrico nas conexões de três rotores.
O TDR possui entradas de ângulo elétrico no estator e no rotor. A saída do ângulo é um torque no eixo do TDR. A diferença entre um TDX e um TDR é que o TDX é um transmissor de torque e o TDR um receptor de torque.
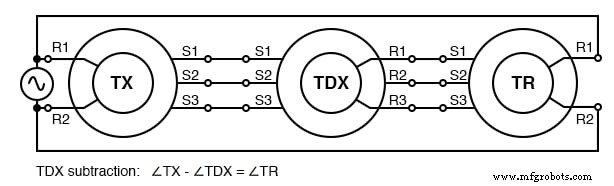
subtração TDX
As entradas de torque são TX e TDX. A diferença angular de saída de torque é TR.
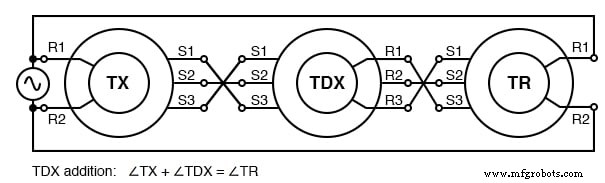
Adição TDX
As entradas de torque são TX e TDX. A soma angular da saída de torque é TR.
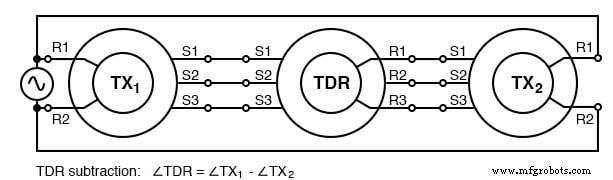
subtração TDR
As entradas de torque são TX 1 e TX 2 . A diferença angular de saída de torque é TDR.
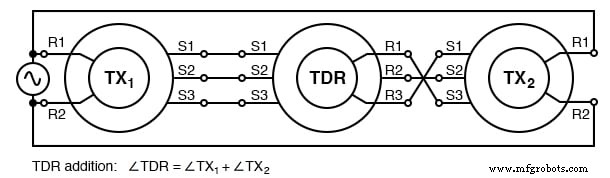
adição de TDR
As entradas de torque são TX 1 e TX 2 . A soma angular da saída de torque é TDR.
Transformador de controle
Uma variação do transmissor síncrono é o transformador de controle . Ele tem três enrolamentos de estator igualmente espaçados como um TX. Seu rotor é enrolado com mais voltas do que um transmissor ou receptor para torná-lo mais sensível na detecção de um nulo quando é girado, normalmente, por um servo sistema.
A saída do rotor CT (Control Transformer) é zero quando orientada em ângulo reto com o vetor do campo magnético do estator. Ao contrário de um TX ou RX, o CT não transmite nem recebe torque. É simplesmente um detector de posição angular sensível.
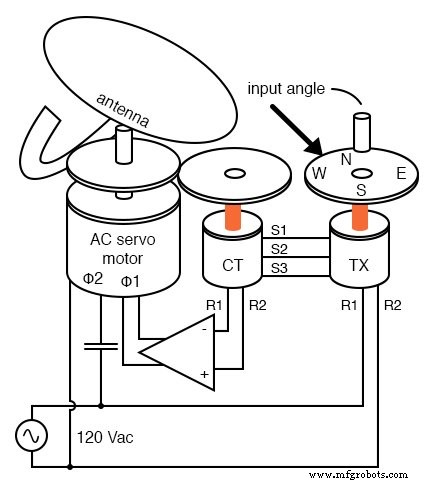
Transformador de controle (CT) detecta servo nulo
Na figura acima, o eixo do TX é colocado na posição desejada da antena do radar. O servo sistema fará com que o servo motor conduza a antena para a posição comandada. O CT compara a posição comandada com a real e sinaliza ao servo amplificador para acionar o motor até que o ângulo comandado seja alcançado.
Servo usa CT para detectar a posição nula da antena
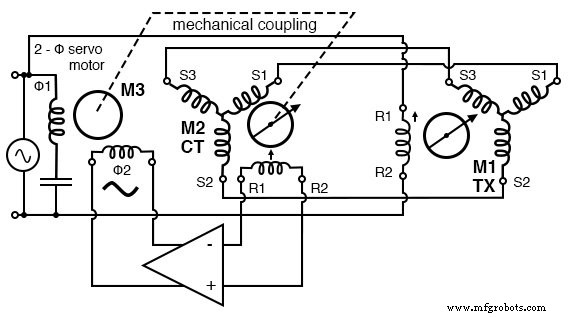
Quando o rotor do transformador de controle detecta um nulo em 90 ° ao eixo do campo do estator, não há saída do rotor. Qualquer deslocamento do rotor produz uma tensão CA de erro proporcional ao deslocamento.
Um servo visa minimizar o erro entre uma variável comandada e medida devido ao feedback negativo. O transformador de controle compara o ângulo do eixo com o ângulo do campo magnético do estator, enviado pelo estator TX.
Quando mede um mínimo ou nulo, o servo conduziu a antena e o rotor do transformador de controle para a posição comandada. Não há nenhum erro entre a posição medida e comandada, nenhuma saída de CT a ser amplificada.
O servo motor , um motor de 2 fases, para de girar. No entanto, qualquer erro detectado de TC aciona o amplificador que aciona o motor até que o erro seja minimizado. Isso corresponde ao servo sistema ter acionado o CT acoplado à antena para coincidir com o ângulo comandado pelo TX.
O servo motor pode acionar um trem de engrenagem de redução e ser grande em comparação com os sincronizadores TX e CT. No entanto, a baixa eficiência dos servo motores CA os limita a cargas menores. Eles também são difíceis de controlar, pois são dispositivos de velocidade constante.
No entanto, eles podem ser controlados até certo ponto, variando a tensão para uma fase com a tensão da linha na outra fase. Cargas pesadas são acionadas com mais eficiência por grandes servo motores CC.
As aplicações aerotransportadas usam componentes de 400 Hz - TX, CT e servo motor. O tamanho e o peso dos componentes magnéticos CA são inversamente proporcionais à frequência. Portanto, o uso de componentes de 400 Hz para aplicações em aeronaves, como superfícies de controle móveis, economiza tamanho e peso.
Resolvedor
Um resolvedor (figura abaixo) tem dois enrolamentos de estator colocados em 90 ° entre si, e um único enrolamento de rotor movido por corrente alternada. Um resolver é usado para conversão polar em retangular. Uma entrada de ângulo no eixo do rotor produz coordenadas retangulares sinθ e tensões proporcionais cosθ nos enrolamentos do estator.
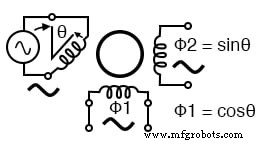
O resolvedor converte o ângulo do eixo em seno e cosseno do ângulo
Por exemplo, uma caixa preta dentro de um radar codifica a distância até um alvo como uma tensão proporcional de onda senoidal V, com o ângulo de direção como um ângulo do eixo. Converta em coordenadas X e Y. A onda senoidal é fornecida ao rotor de um resolver. O eixo do ângulo do rolamento é acoplado ao eixo do resolver. As coordenadas (X, Y) estão disponíveis nas bobinas do estator do resolver:
X =V (cos (∠bearing)) Y =V (sin (∠bearing))
As coordenadas cartesianas (X, Y) podem ser traçadas em uma exibição de mapa. Um TX (transmissor de torque) pode ser adaptado para serviço como resolvedor.

Scott-T converte 3-φ em 2-φ, permitindo que TX execute a função de resolução
É possível derivar componentes angulares de quadratura semelhantes a resolvedores de um transmissor síncrono usando um Scott-T transformador. As três saídas TX, 3 fases, são processadas por um Scott-T transformador em um par de componentes de quadratura. Também existe uma versão linear do resolvedor conhecido como inductosyn. A versão rotativa do inductosyn tem uma resolução mais precisa do que um resolvedor.
Resumo:motores Selsyn (sincro)
- Um sincronizador , também conhecido como selsyn , é um transformador rotativo usado para transmitir o torque do eixo.
- A TX, transmissor de torque , aceita uma entrada de torque em seu eixo para transmissão em saídas elétricas trifásicas.
- Um RX, receptor de torque , aceita uma representação elétrica trifásica de uma entrada angular para conversão em uma saída de torque em seu eixo. Assim, TX transmite um torque de um eixo de entrada para um eixo de saída RX remoto.
- Um TDX, transmissor de diferencial de torque , soma uma entrada de ângulo elétrico com uma entrada de ângulo do eixo produzindo uma saída de ângulo elétrico
- Um TDR, receptor de diferencial de torque, soma duas entradas de ângulo elétrico produzindo uma saída de ângulo do eixo
- Um CT, transformador de controle , detecta um nulo quando o rotor está posicionado em um ângulo reto em relação à entrada do ângulo do estator. Um CT é normalmente um componente de um sistema de feedback servo.
- Um resolvedor produz uma representação de quadratura sin (θ) e cos (θ) da entrada do ângulo do eixo em vez de uma saída trifásica.
- A saída trifásica de um TX é convertida em uma saída de estilo resolvedor por um transformador Scott-T .
Tecnologia industrial
- Motores de indução monofásicos
- Motores do comutador CA
- Dica técnica:Motores
- Acionamentos e motores em plataformas de teste automotivo
- Benefícios dos motores resfriados a líquido
- Escovas de carbono em motores CC:usos, falhas comuns e mais
- Segurança do motor elétrico:diferentes fases e medidas de segurança
- 7 etapas para garantir uma manutenção melhorada de motores elétricos
- 4 principais tipos de falhas de enrolamento em motores elétricos CA
- Motores elétricos DC vs. AC:quais são suas diferenças?