


Motores do comutador CA
O primeiro trabalho de Charles Proteus Steinmetz depois de chegar à América foi investigar os problemas encontrados no projeto da versão de corrente alternada do motor do comutador escovado. A situação era tão ruim que os motores não podiam ser projetados antes da construção real.
O sucesso ou falha de um projeto de motor não é conhecido até que ele seja realmente construído e testado. Ele formulou as leis da histerese magnética em encontrar uma solução. A histerese é um atraso da força do campo magnético em comparação com a força de magnetização. Isso produz uma perda não presente no magnetismo CC.
Ligas de baixa histerese e quebra da liga em laminações isoladas finas tornou possível projetar motores de comutador CA com precisão antes da construção.
Motores de comutador CA, como motores CC comparáveis, têm maior torque de partida e velocidade mais alta do que motores de indução CA.
O motor em série opera bem acima da velocidade síncrona de um motor CA convencional. Os motores do comutador CA podem ser monofásicos ou polifásicos. A versão CA monofásica sofre uma pulsação de torque de frequência de linha dupla, não presente no motor polifásico.
Uma vez que um motor de comutador pode operar a uma velocidade muito mais alta do que um motor de indução, ele pode produzir mais energia do que um motor de indução de tamanho semelhante. No entanto, os motores do comutador não são tão livres de manutenção quanto os motores de indução, devido ao desgaste da escova e do comutador.
Motor Série Monofásico
Se um motor da série DC equipado com um campo laminado for conectado à AC, a reatância de atraso da bobina de campo reduzirá consideravelmente a corrente de campo. Embora esse motor gire, a operação é marginal.
Durante a partida, os enrolamentos da armadura conectados aos segmentos do comutador em curto pelas escovas parecem transformadores em curto voltados para o campo. Isso resulta em consideráveis arcos e faíscas nas escovas conforme a armadura começa a girar.
Isso é menos problemático à medida que a velocidade aumenta, o que compartilha o arco e a centelha entre os segmentos do comutador. A reatância de atraso e as escovas de arco são toleráveis apenas em motores CA de série não compensada muito pequenos operados em alta velocidade. Os motores da série AC menores do que furadeiras manuais e misturadores de cozinha podem ser descompensados. (Figura abaixo)
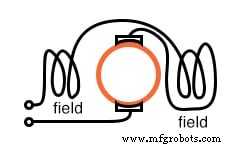
Motor CA de série não compensada
Motor Série Compensada
O arco e centelha são mitigados pela colocação de um enrolamento de compensação o estator em série com a armadura posicionada de forma que sua força magnetomotriz (mmf) cancele a armadura AC mmf.
Um entreferro menor do motor e menos curvas de campo reduzem a reatância de atraso em série com a armadura melhorando o fator de potência. Todos os motores de comutador CA, exceto os muito pequenos, utilizam enrolamentos de compensação. Motores tão grandes quanto aqueles empregados em um misturador de cozinha, ou maiores, usam enrolamentos de estator compensados.
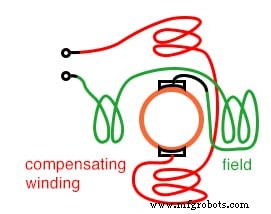
Motor CA de série compensada
Motor universal
É possível projetar pequenos (abaixo de 300 watts) motores universais que funcionam de DC ou AC. Motores universais muito pequenos podem não ser compensados. Os motores universais maiores e de alta velocidade usam um enrolamento de compensação.
Um motor funcionará mais lentamente em CA do que em CC devido à reatância encontrada com CA. Porém, os picos das ondas senoidais saturam o caminho magnético reduzindo o fluxo total abaixo do valor DC, aumentando a velocidade do motor “série”.
Assim, os efeitos de compensação resultam em uma velocidade quase constante de DC a 60 Hz. Os pequenos aparelhos operados em linha, como furadeiras, aspiradores de pó e misturadores, que exigem de 3.000 a 10.000 rpm, usam motores universais.
Porém, o desenvolvimento de retificadores de estado sólido e ímãs permanentes baratos está tornando o motor de ímã permanente CC uma alternativa viável.
Motor de repulsão
Um motor de repulsão consiste em um campo diretamente conectado à tensão da linha CA e um par de escovas em curto com deslocamento de 15 ° a 25 ° do eixo do campo. O campo induz um fluxo de corrente para a armadura em curto, cujo campo magnético se opõe ao das bobinas de campo.
A velocidade pode ser controlada girando as escovas em relação ao eixo do campo. Este motor tem comutação superior abaixo da velocidade síncrona, comutação inferior acima da velocidade síncrona. A baixa corrente de partida produz alto torque de partida.
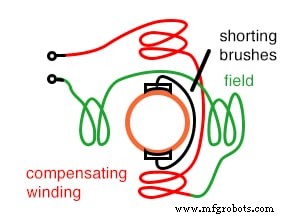
Motor CA de repulsão
Motor de indução de partida de repulsão
Quando um motor de indução aciona uma carga de partida difícil como um compressor, o alto torque de partida do motor de repulsão pode ser usado. Os enrolamentos do rotor do motor de indução são trazidos para os segmentos do comutador para a partida por um par de escovas em curto.
Quase na velocidade de operação, uma chave centrífuga provoca um curto-circuito em todos os segmentos do comutador, dando o efeito de um rotor de gaiola de esquilo. As escovas também podem ser levantadas para prolongar sua vida útil. O torque de partida é de 300% a 600% do valor da velocidade total, em comparação com menos de 200% para um motor de indução puro.
Resumo:motores do comutador CA
- O motor série monofásico é uma tentativa de construir um motor como um motor de comutador CC. O motor resultante só é prático nos menores tamanhos.
- A adição de um enrolamento de compensação produz o motor em série compensada , superando a centelha excessiva do comutador. A maioria dos motores de comutador CA são desse tipo. Em alta velocidade, este motor fornece mais potência do que um motor de indução do mesmo tamanho, mas não é isento de manutenção.
- É possível produzir motores de pequenos eletrodomésticos alimentados por CA ou CC. Isso é conhecido como um motor universal .
- A linha CA é conectada diretamente ao estator de um motor de repulsão com o comutador em curto com as escovas.
- Escovas retráteis em curto podem dar partida em um motor de indução do rotor enrolado. Isso é conhecido como motor de indução de início de repulsão.
Tecnologia industrial
- Introdução aos motores CA
- Motores de indução monofásicos
- Dica técnica:Motores
- Motores elétricos superdimensionados:eles devem ser substituídos?
- Segurança do motor elétrico:diferentes fases e medidas de segurança
- 4 principais tipos de falhas de enrolamento em motores elétricos CA
- Sobre motores industriais e aplicações
- Uma introdução ao motor BLDC
- 5 razões pelas quais os motores TEFC falham
- Manutenção adequada dos motores do compressor