


Braço do robô MeArm - Seu robô - V1.0
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Sobre este projeto
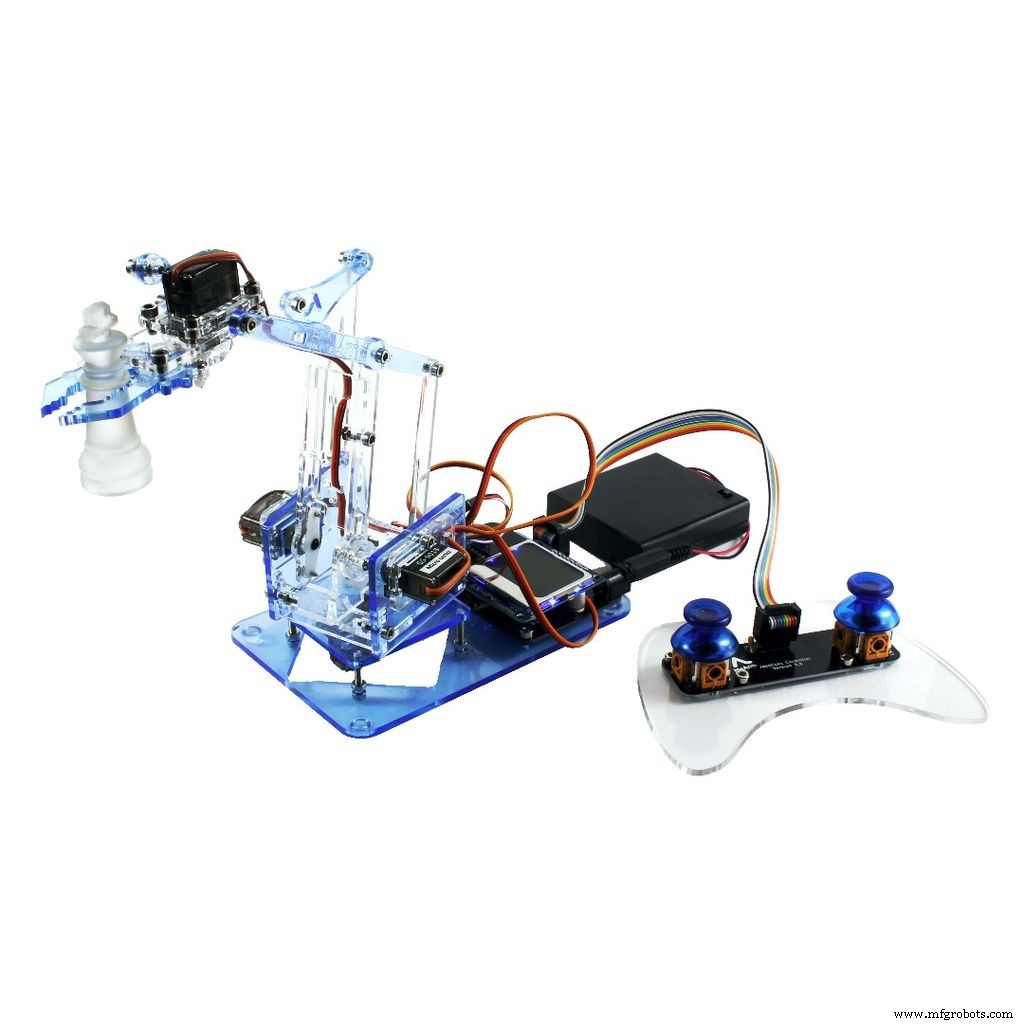
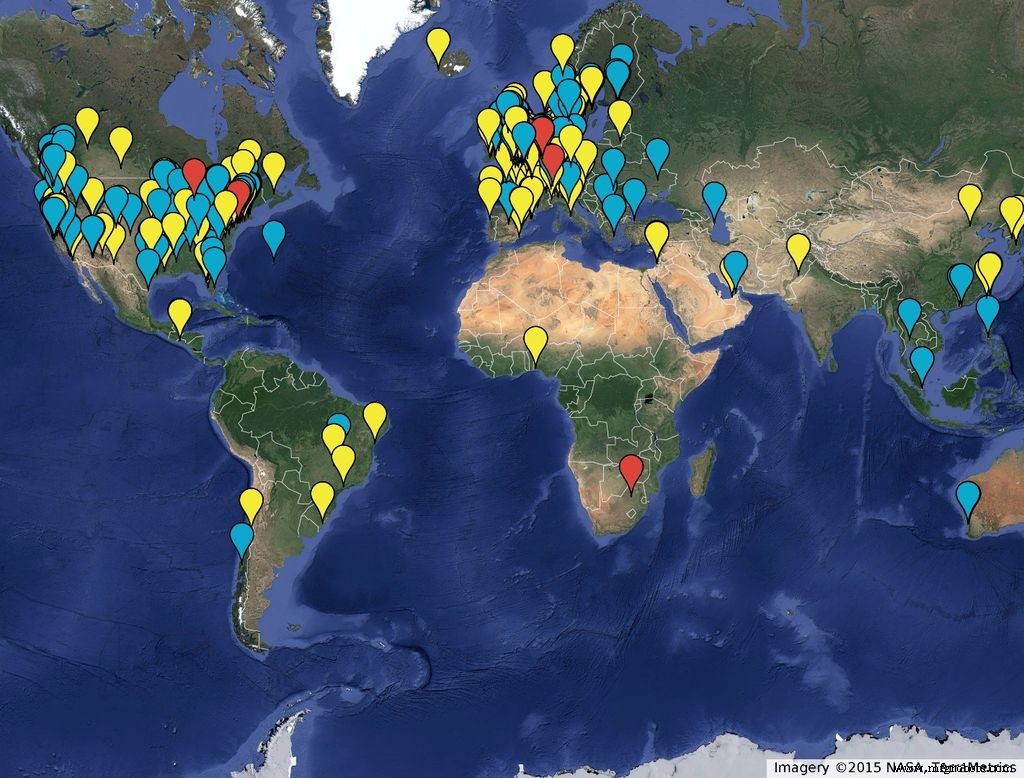
Esta é a versão mais recente das instruções de construção do MeArm Robot Arm. O MeArm chegou aos instructables pela primeira vez em abril de 2014, quando conquistamos o segundo prêmio no concurso de robôs. Desde então, vimos cerca de 10.000 construídos em todo o mundo! Apenas alguns são mostrados em nosso mapa, mas estamos muito orgulhosos de que, com a ajuda de instructables, nos tornamos o primeiro robô viral do mundo!
Reunimos essas instruções para complementar as de nossa página de recursos.
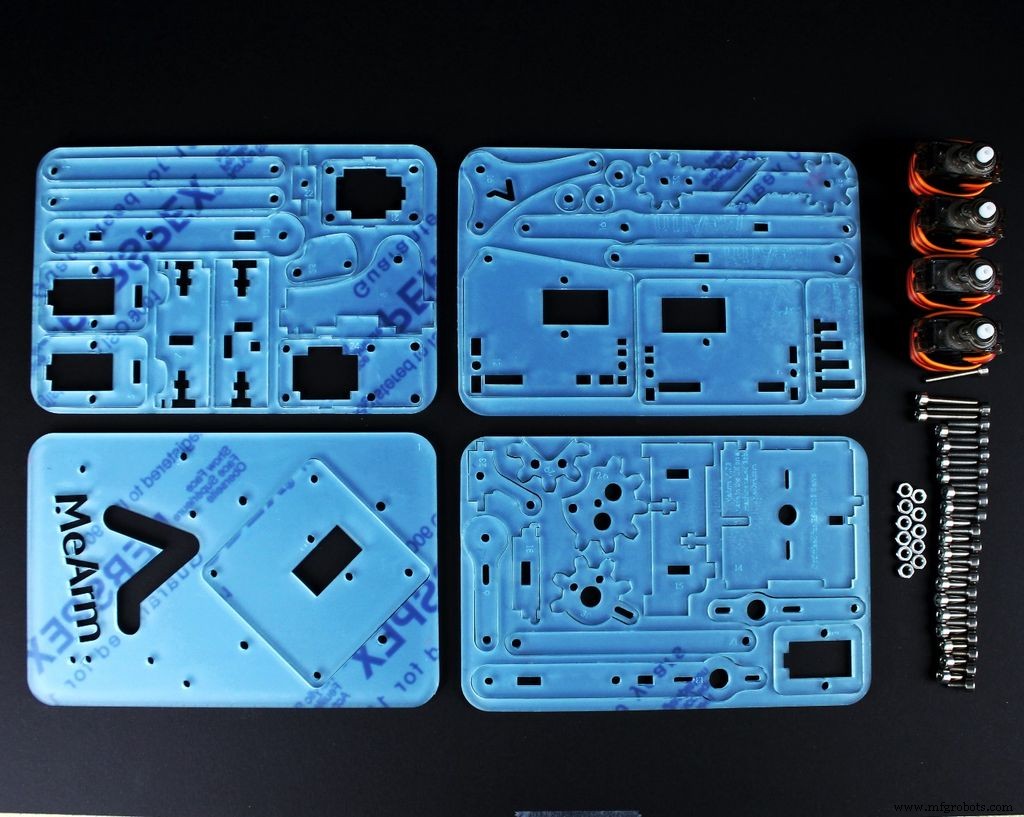
Etapa 1:pegue seus arquivos, ligue seus lazors!
O MeArm ainda é e sempre foi um hardware de código aberto. Então você pode pegar nossos arquivos em thingiverse. É um arquivo .dxf, então deve funcionar na maioria dos cortadores a laser e colocamos uma caixa ao redor das peças para que você possa definir o tamanho correto. Usamos acrílico de 3mm, mas o design é bastante tolerante e já vimos feito em madeira e até impresso em 3D.
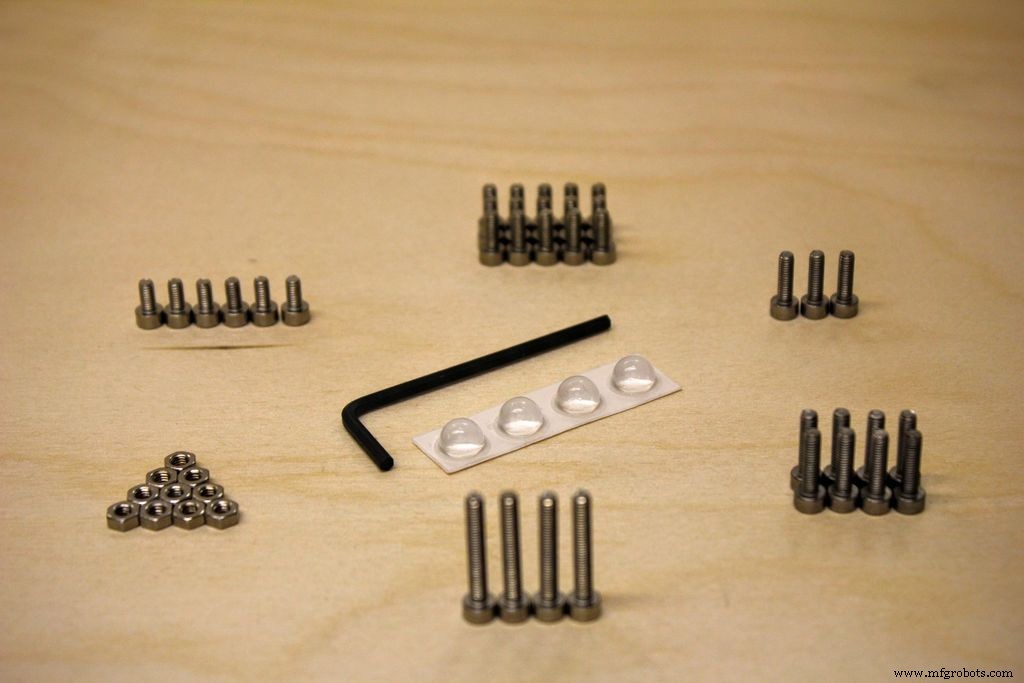
Você também precisará de um monte de parafusos. O carregamento atual requer:
Porca x 11
6 mm x 7
8mm x 15
10mm x 5
12 mm x 8
20 mm x 4
Todo o tamanho M3, isso é métrico 3 mm. O que eu entendo que pode ser difícil de encontrar nos Estados Unidos, mas vamos lá, você chegou à lua, você pode descobrir uma alternativa adequada!
Etapa 2:Espere! Vamos calibrar!
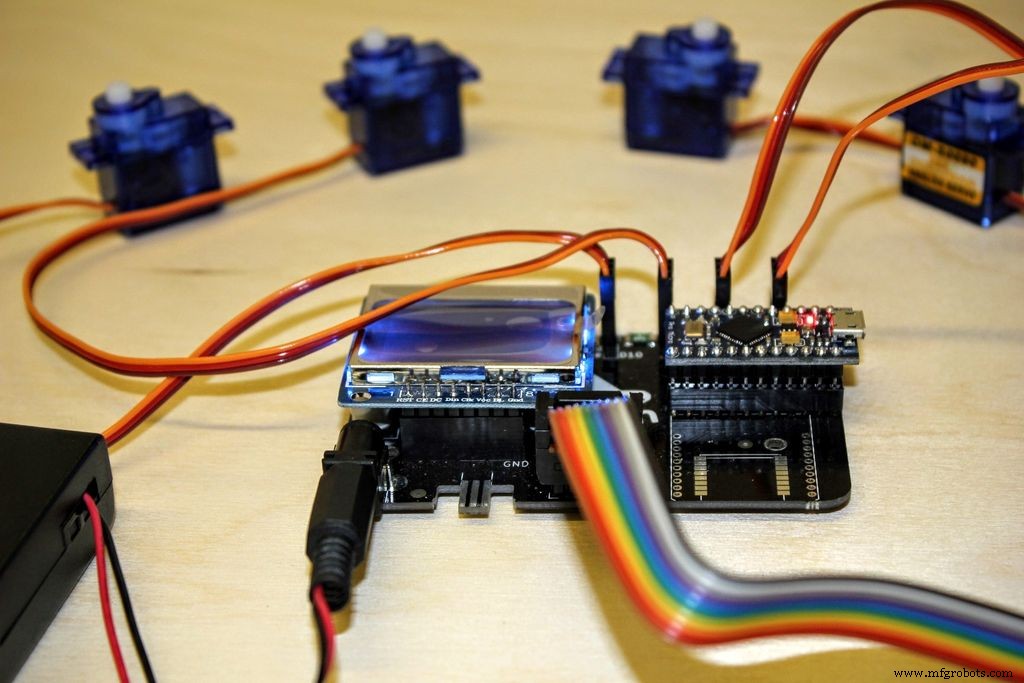

Se você cortou suas peças a laser ou comprou um de nossos kits, você realmente gostaria de construí-lo. Mas primeiro você precisa concluir uma etapa vital. Precisamos calibrar os servos. Aqui usaremos nosso Brains Board, que é compatível com o Arduino, mas você pode usar qualquer coisa que gere um sinal PWM para calibrá-los. Há código MeArm disponível para Arduino, Raspberry Pi, Beaglebone Black, Sparkcore e Espruino.
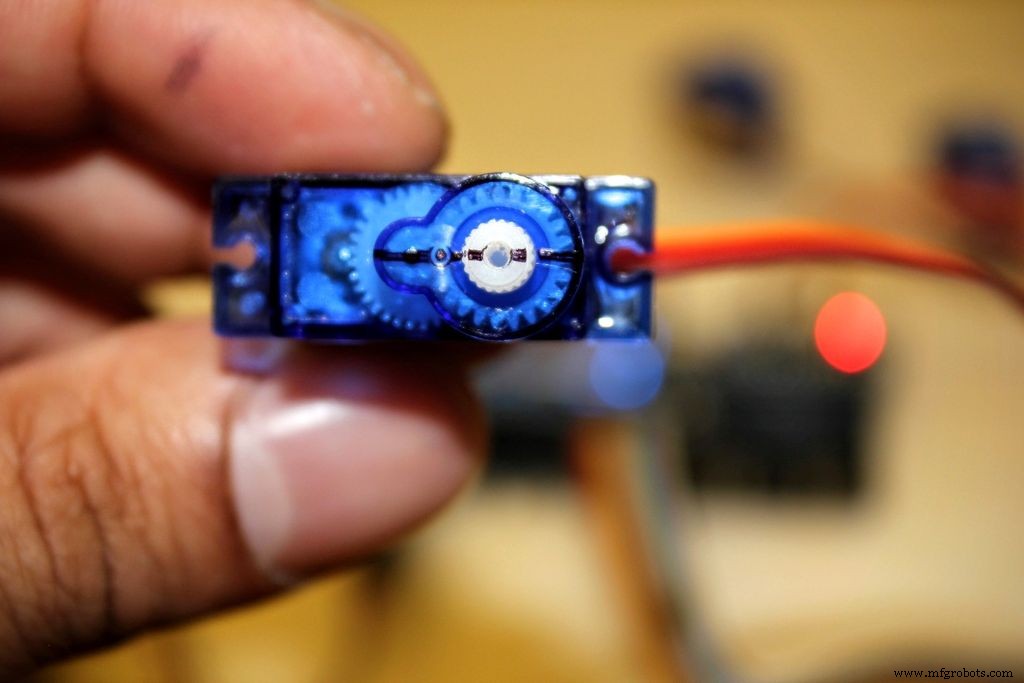
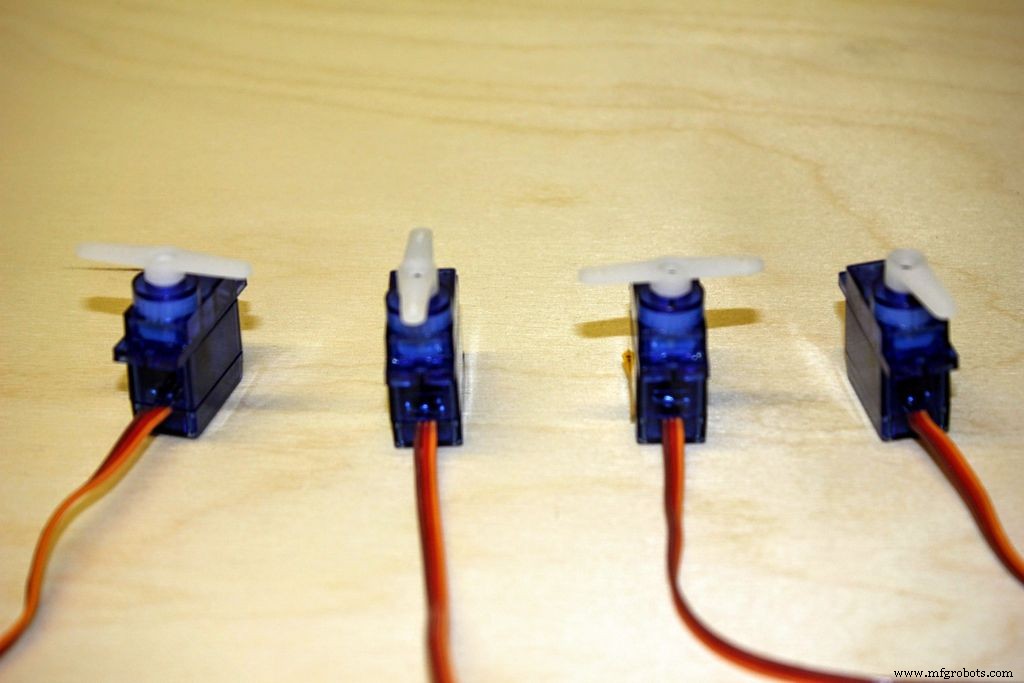
Usando nosso Brains Board, ele virá programado para ir para as posições padrão. Quais são 90, 90, 90 e 25 para os servos do centro, esquerdo, direito e garra, respectivamente. Marque uma linha central no fuso e no corpo do servo e você também pode marcá-los c, l, r e c ou por outro sistema que signifique algo para você.
Não fique tentado a girá-los com as mãos, o torque fornecido por sua poderosa força pode prejudicar as engrenagens do servo. Pelo mesmo motivo, é muito importante que você execute esse processo antes de criar seu MeArm.
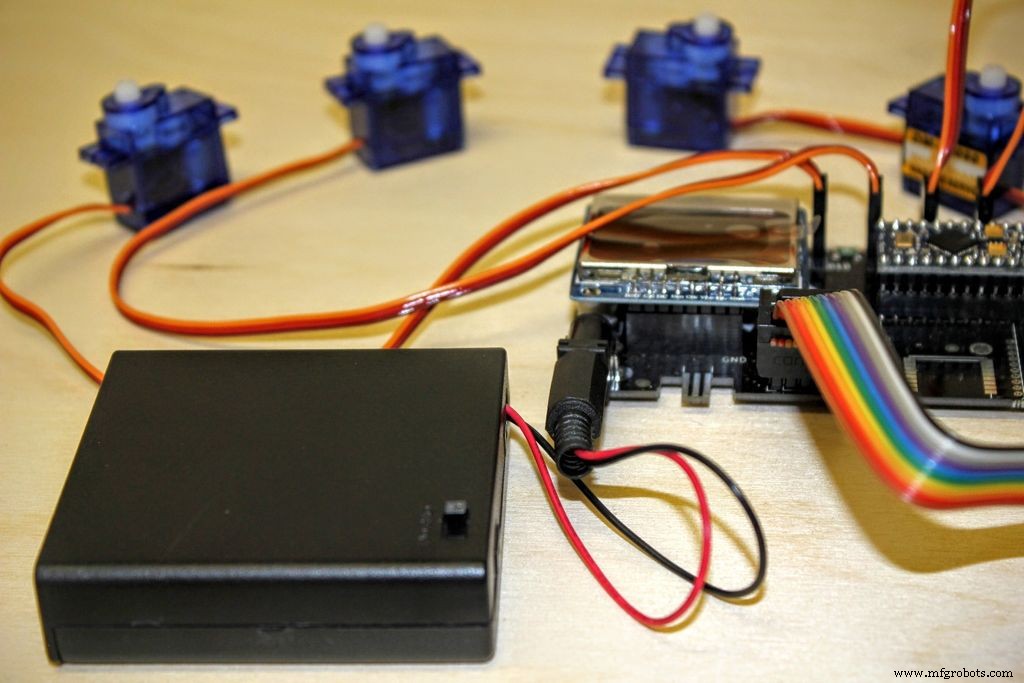
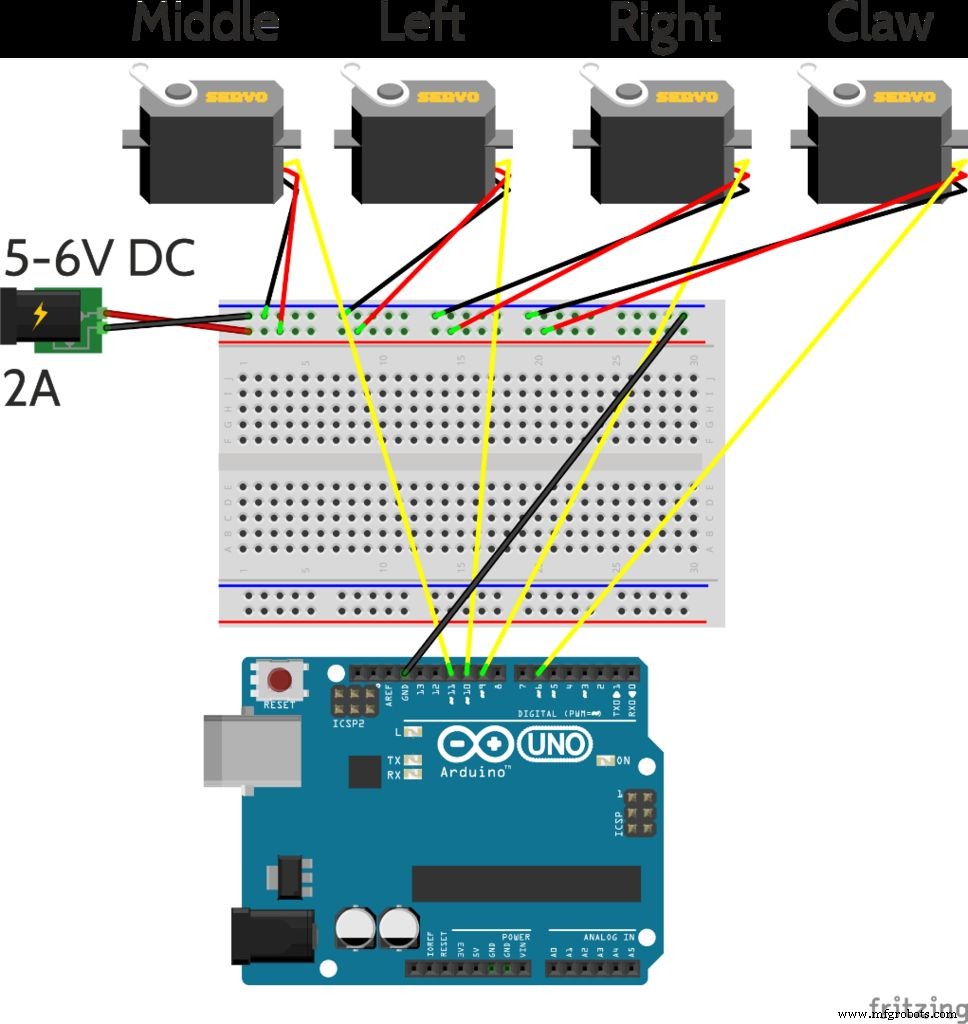
Se você estiver usando um Arduino, a configuração mostrada na imagem acima e este código fornecerão o mesmo resultado. Usamos Codebender para nosso código de demonstração e adoraríamos uma camiseta. Portanto, use este link se for abrir uma conta.
A parte mais importante a perceber ao configurar seus servos é que você não é capaz de alimentá-los através do seu microcontrolador. Você precisa de uma fonte de alimentação separada de 5-6 V 2A, com um aterramento comum para o microcontrolador. Confira a imagem de configuração do Arduino para mais informações.
Etapa 3:vamos lá!
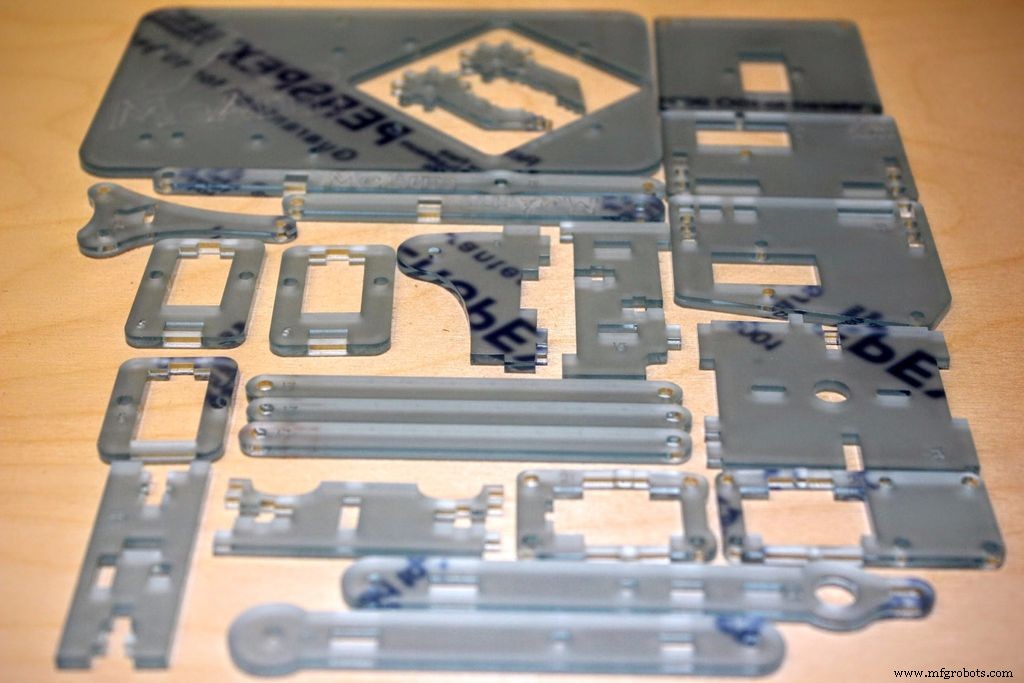
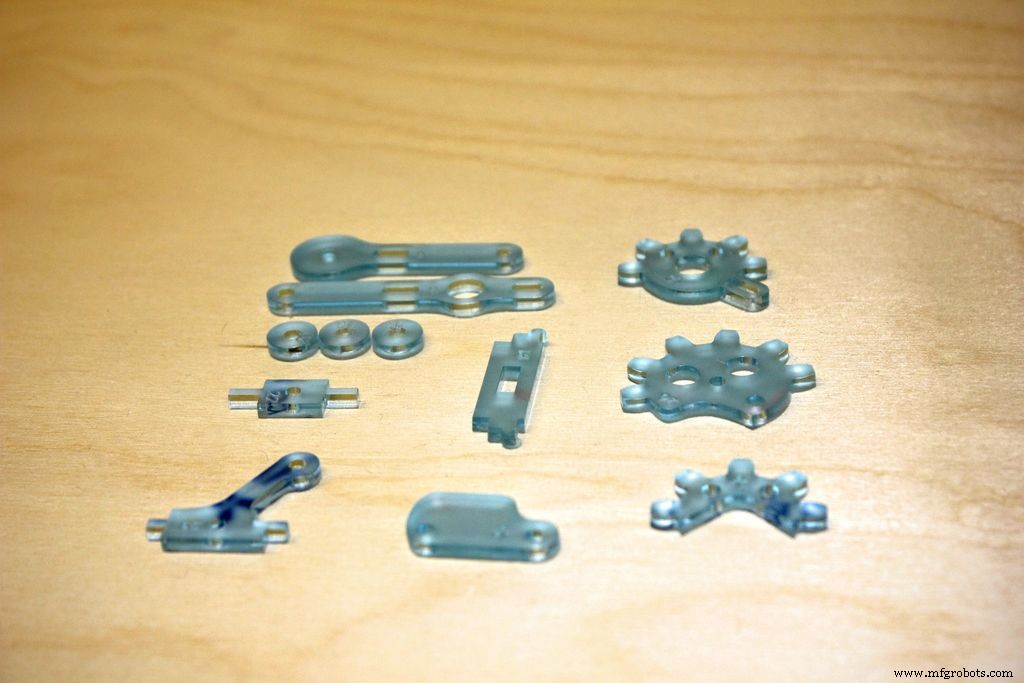
Com seus servos calibrados, podemos rachar. Literalmente se você tiver um de nossos pacotes de snap out!
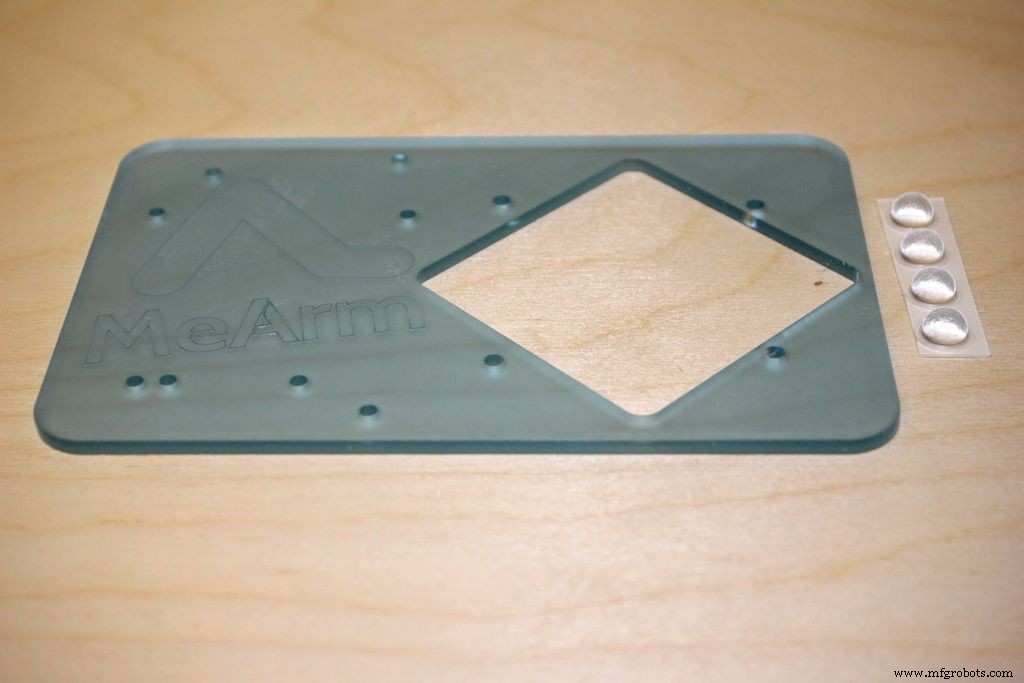
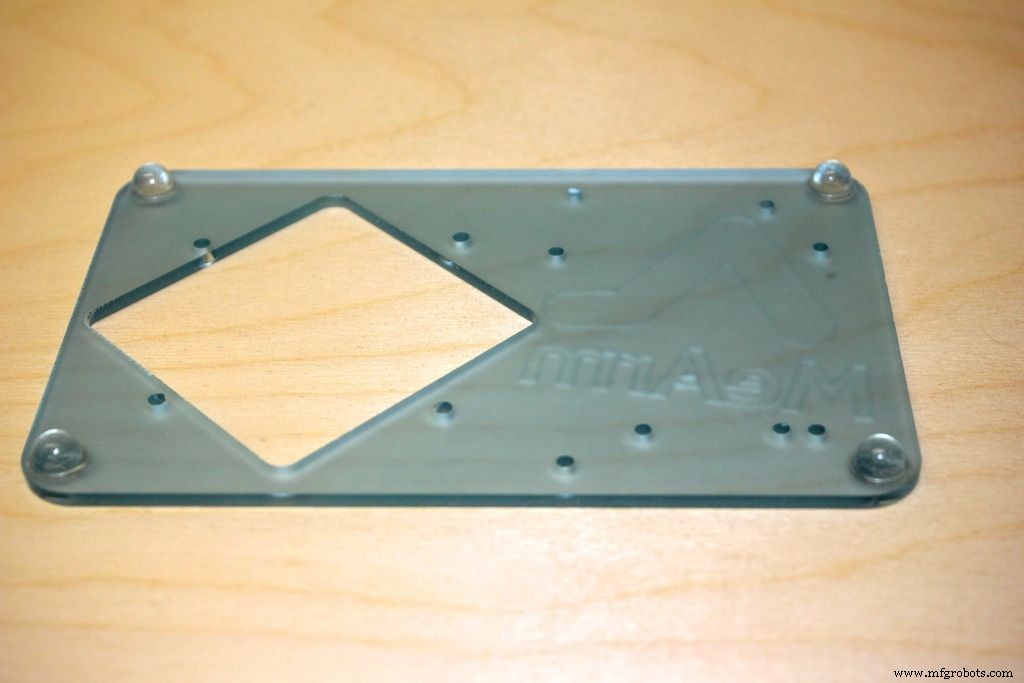
Provavelmente, você terá que passar algum tempo removendo a camada protetora das peças de acrílico. Você pode fazer isso durante o processo ou tudo de uma vez. Sua chamada.
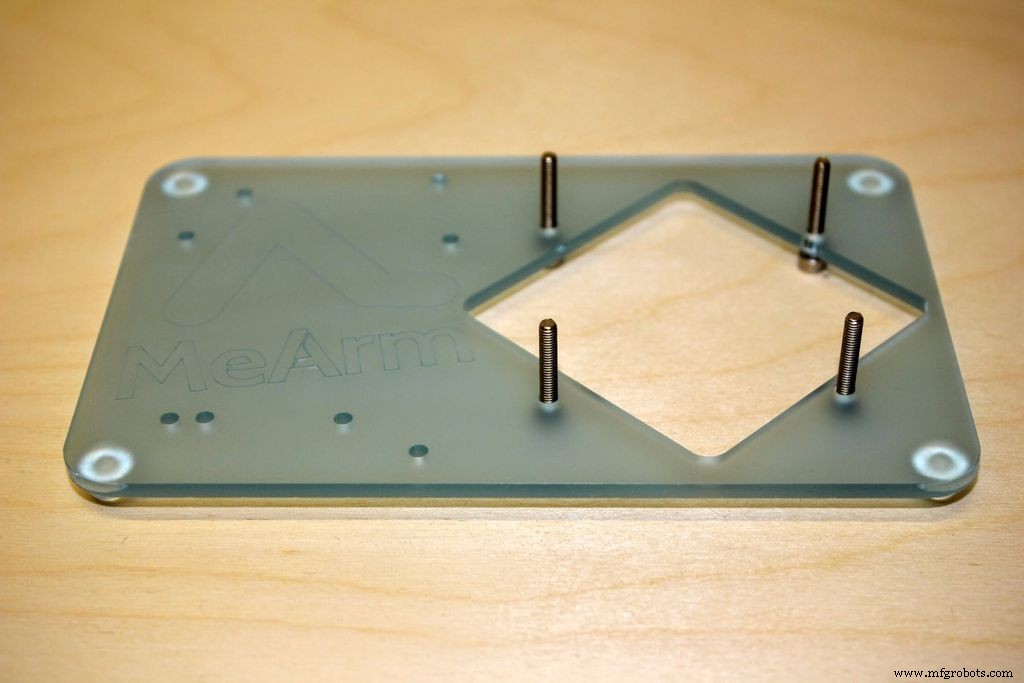
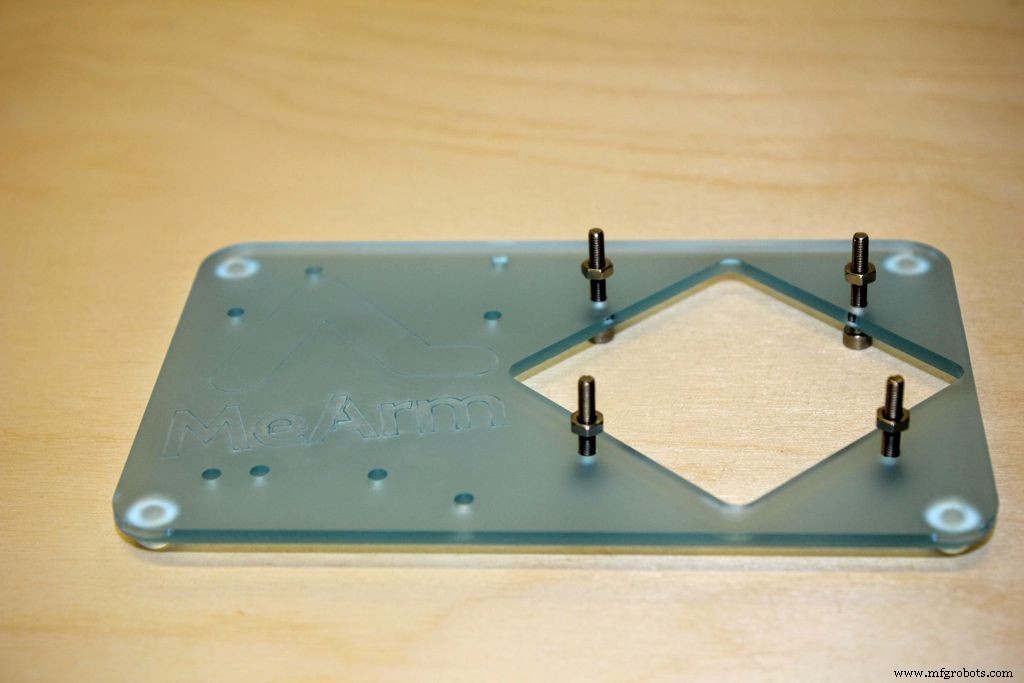
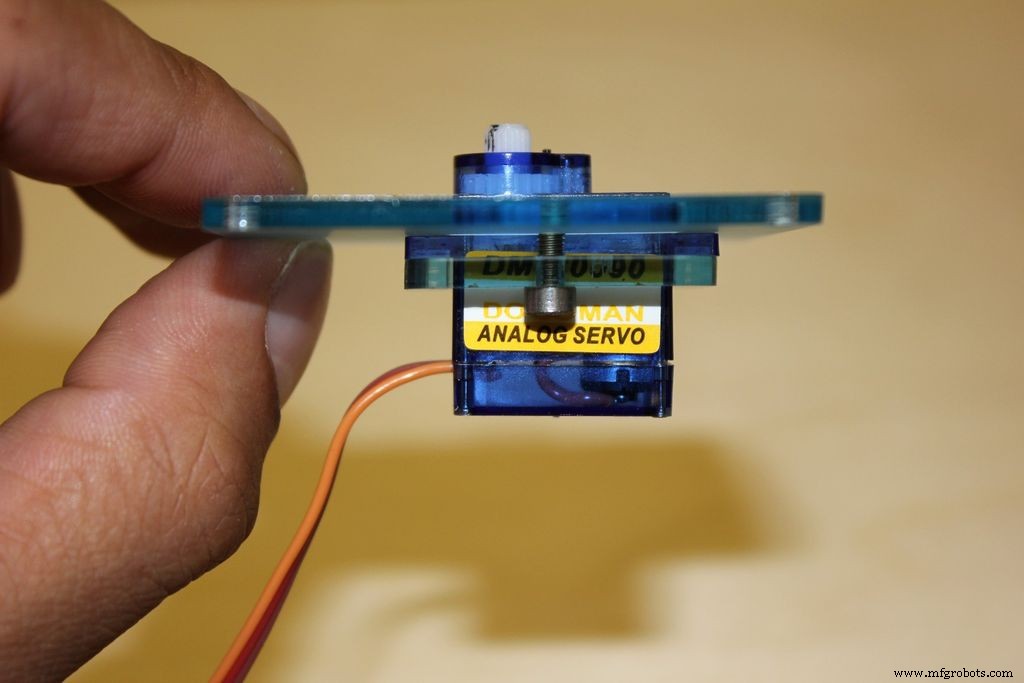
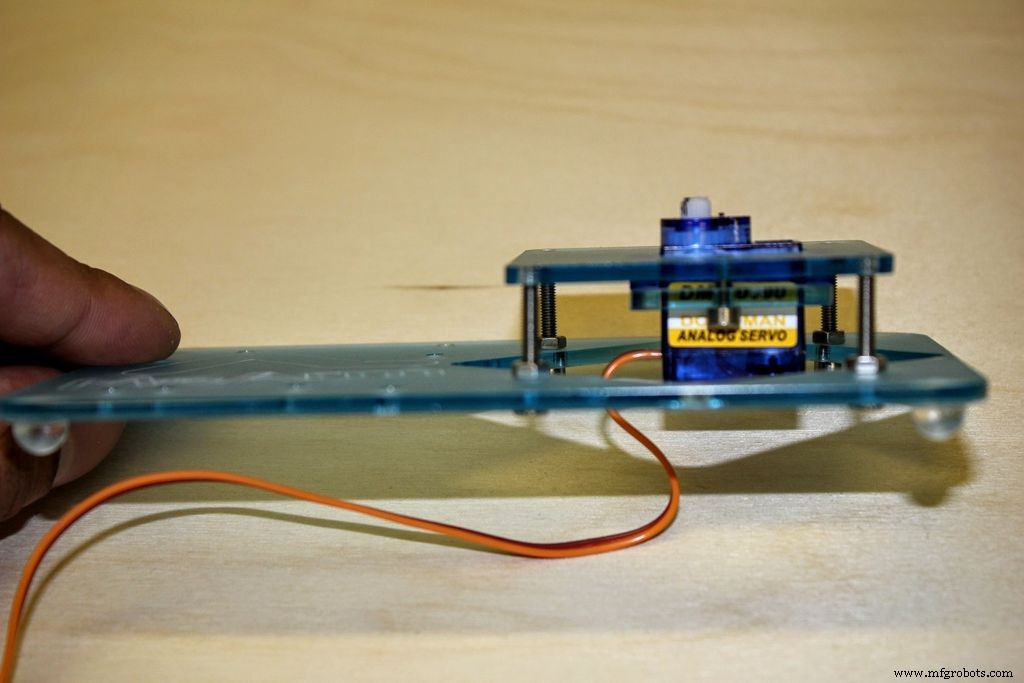
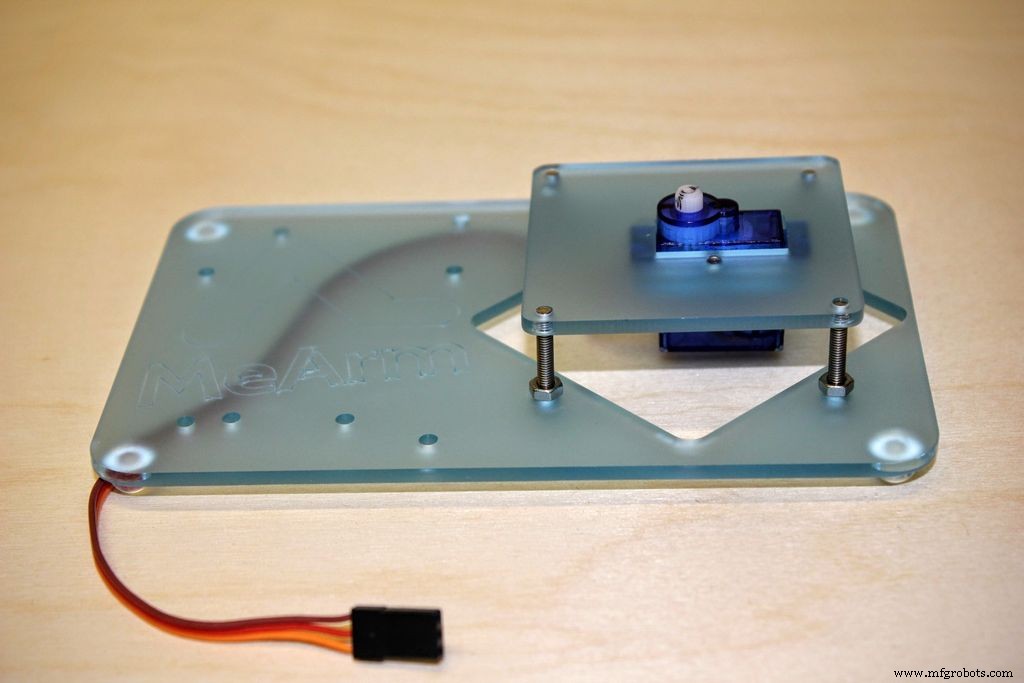
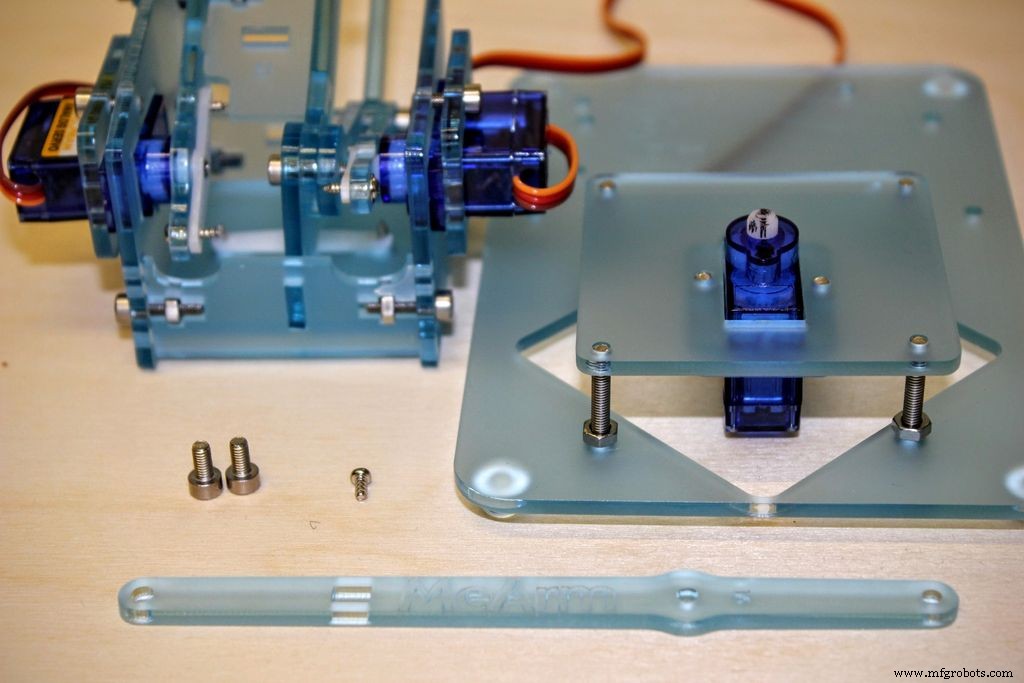
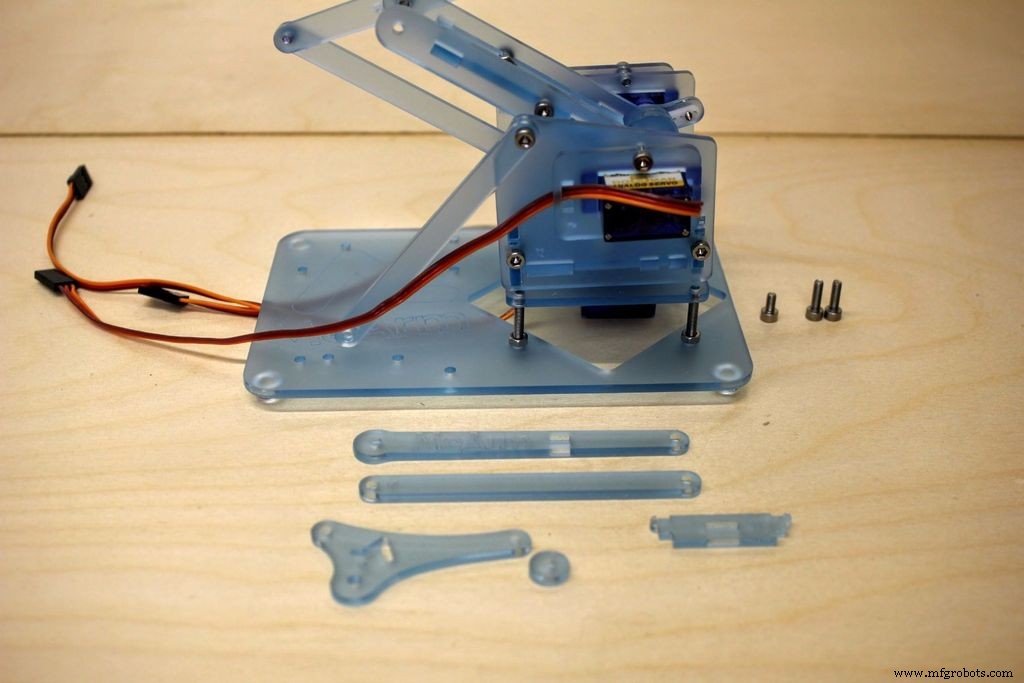
Localize a parte maior (# 1) e prenda os pés de almofada adesiva em seus cantos. Em seguida, insira os quatro parafusos de 20 mm da parte inferior e aparafuse quatro porcas a meio deles. Agora encontre as peças 2, 3, seu servo central e dois parafusos de 8 mm. Passe o servo pela parte # 3, que chamamos de colar. Empurre os parafusos através do colar e, em seguida, aparafuse-os na parte nº 2.
Os parafusos se encaixam na parte 2, o que significa que eles cortam sua própria rosca. No MeArm existem dois tamanhos de orifícios, um com cerca de 3 mm, onde pode empurrar o parafuso, e outro com cerca de 2,6 mm, onde queremos que o parafuso se auto-atarraxe. Este é um método que pegamos emprestado do incrível PlotClock de Joo.
Agora, anexamos o conjunto servo / colar à peça nº 1 por meio dos parafusos de 20 mm, eles se auto-rolarão e a orientação dos orifícios nas peças deve significar que você não pode fazer o contrário. Isso é chamado de Poka-yoke e é um método para projetos à prova de idiotas. Se você tem um modelo anterior v1.0, verá que minha tentativa é muito zelosa, pois há apenas 1/8 de maneiras de acertar (se você não conseguir combinar os furos, vire a peça). As versões posteriores foram temperadas pelo conselho de Scott Pierce e possuem 1/2 maneiras.
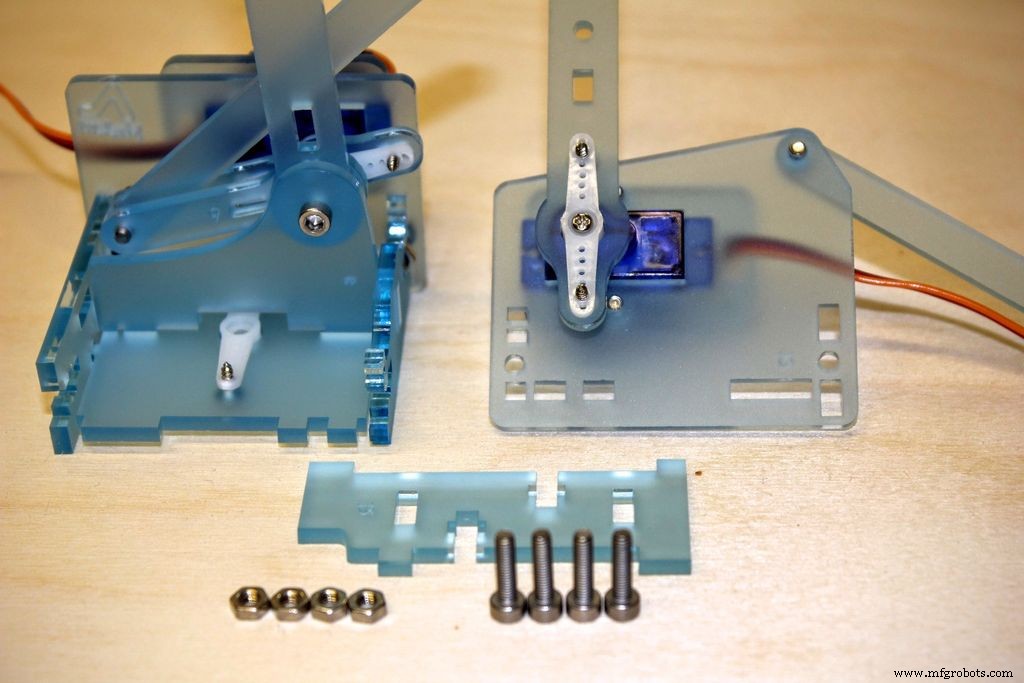
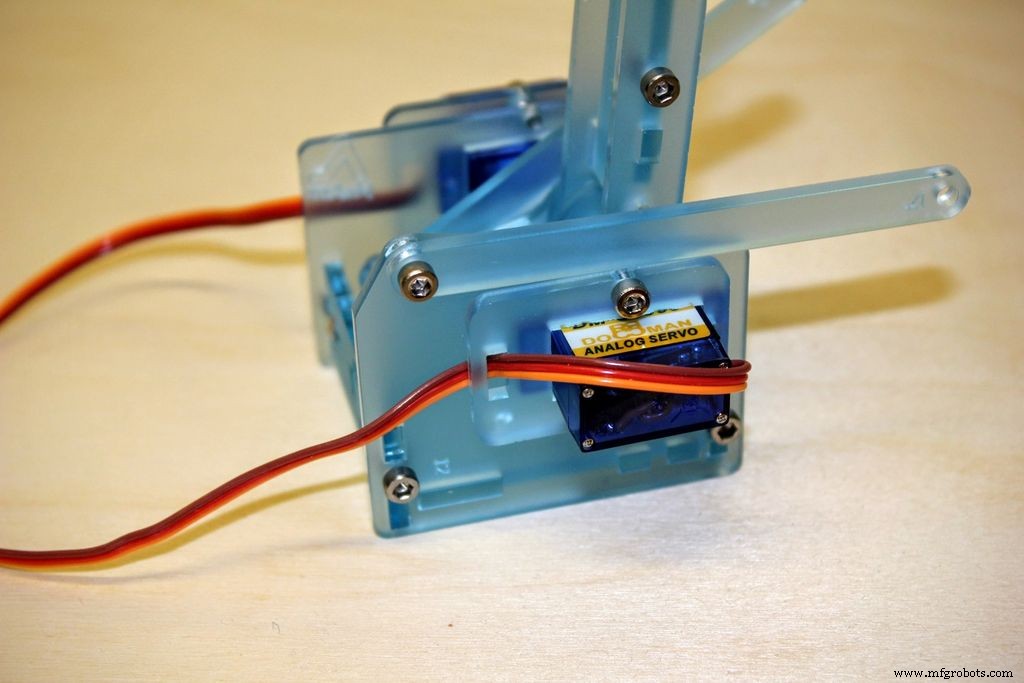
Etapa 4:lado esquerdo
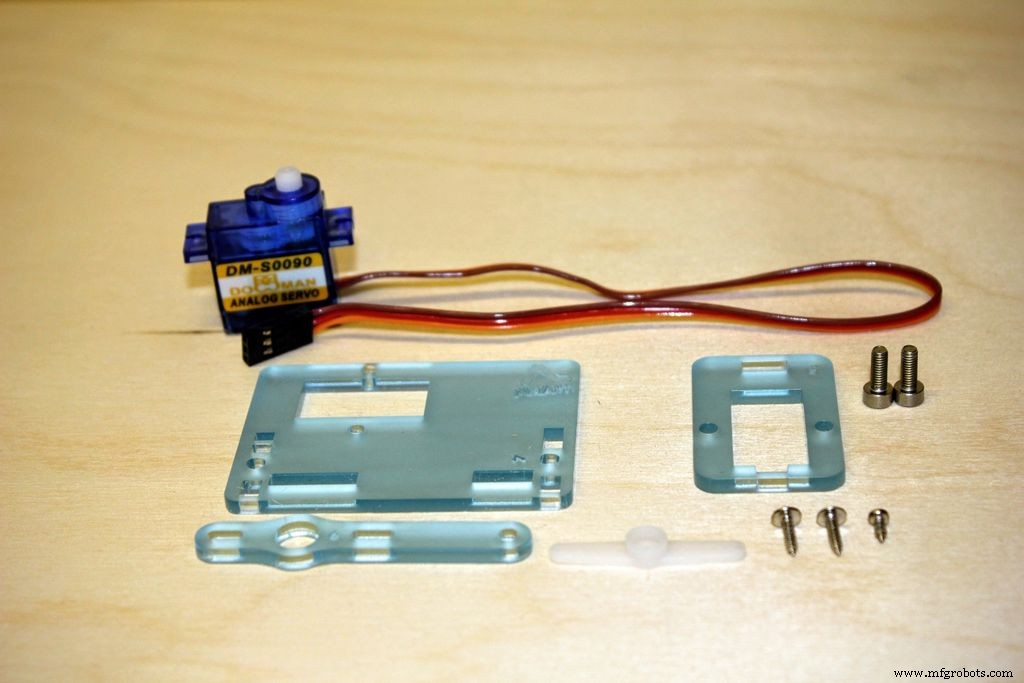

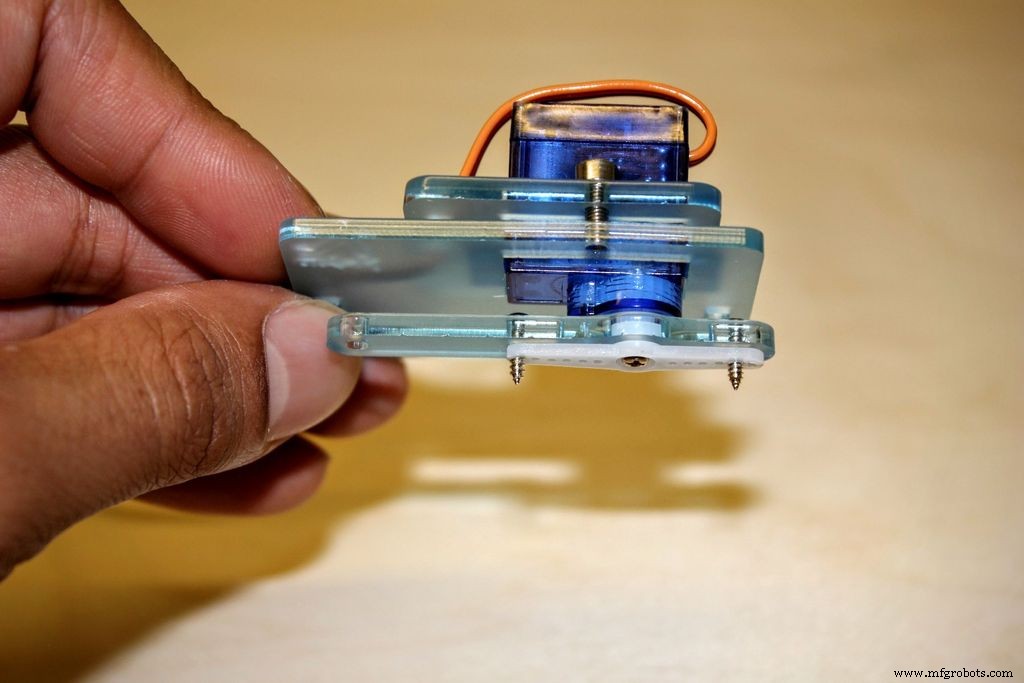
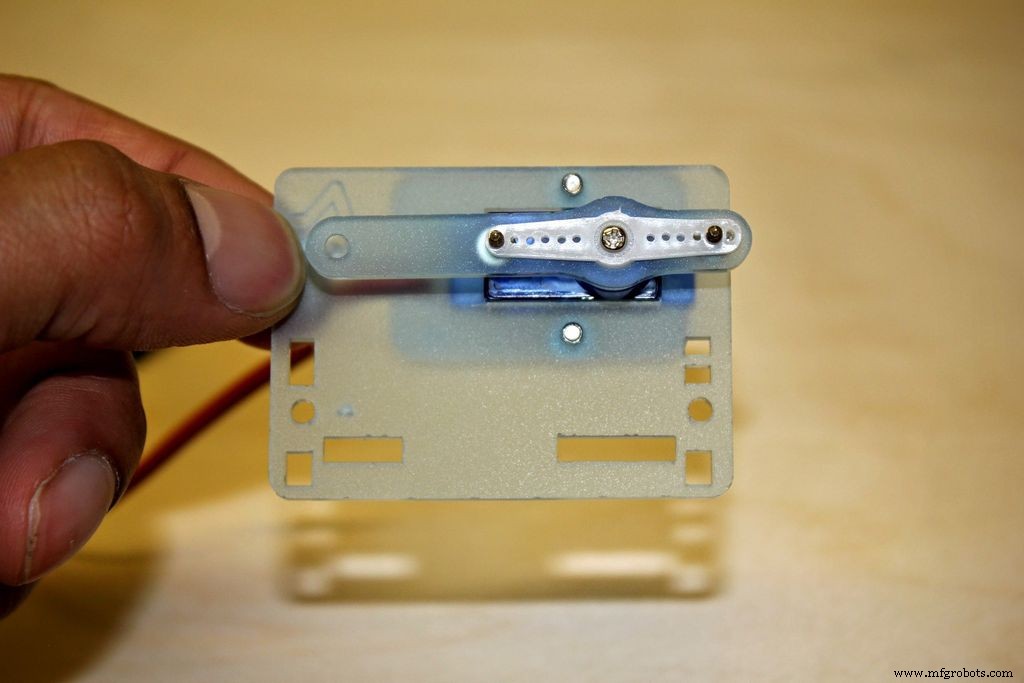
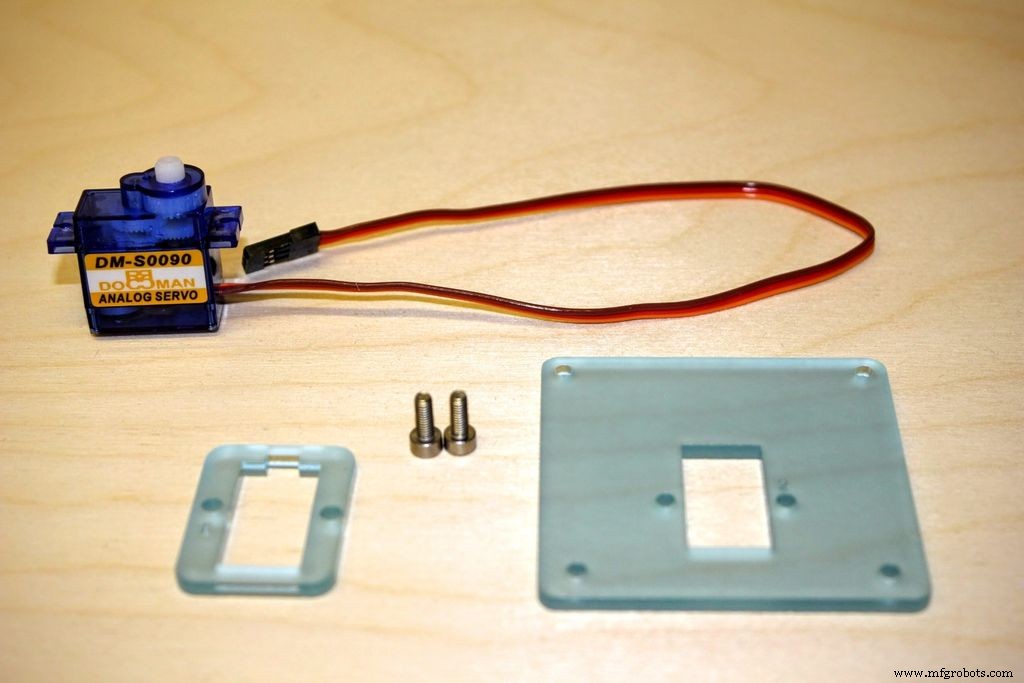
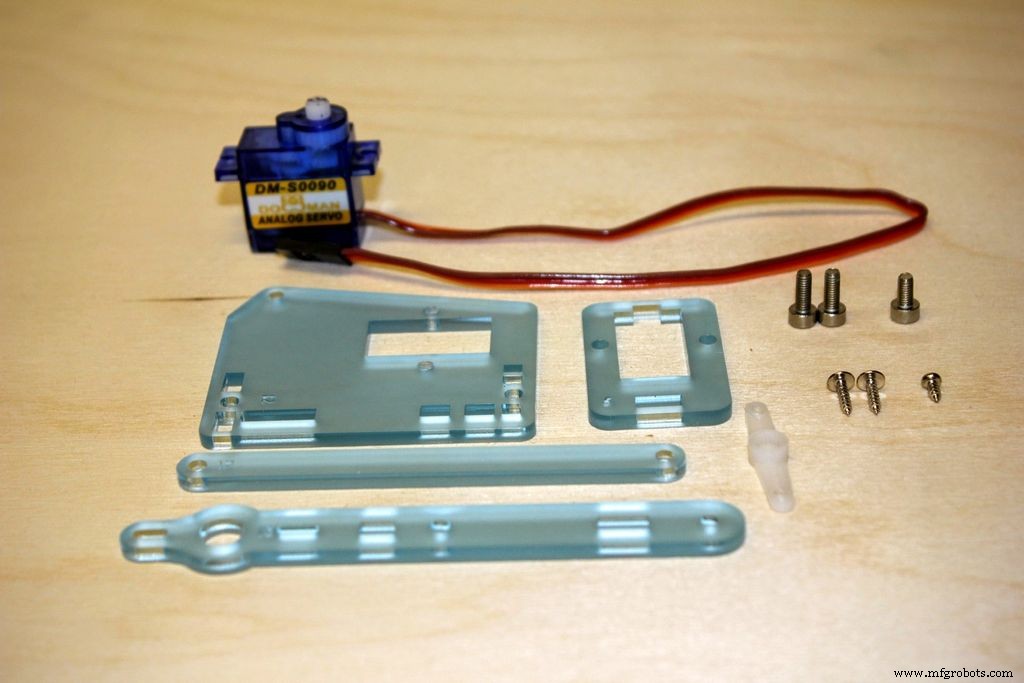
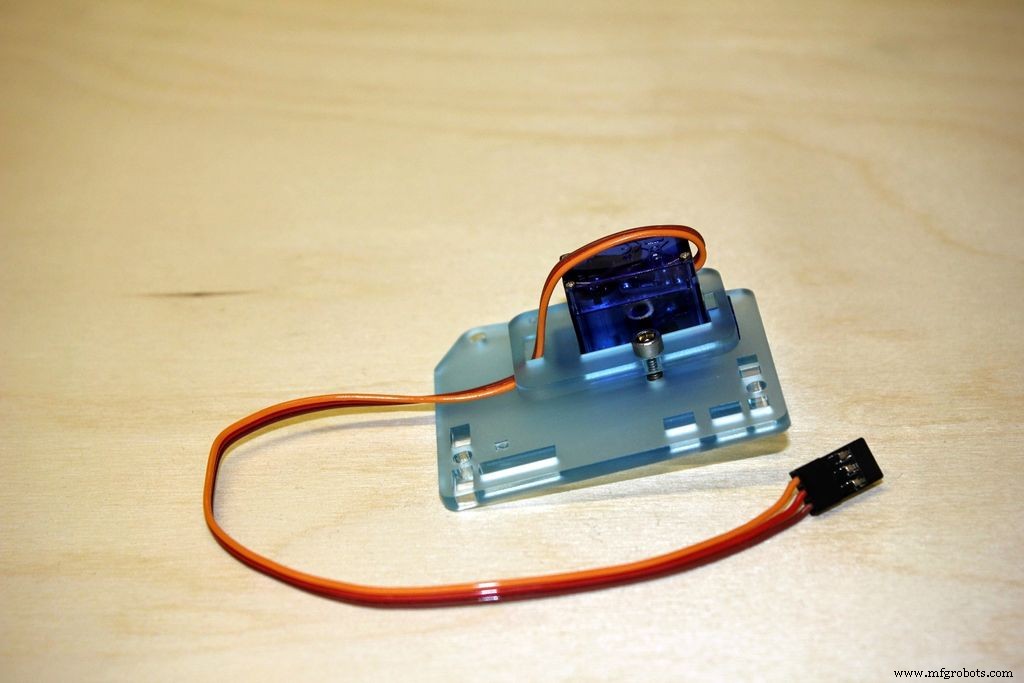
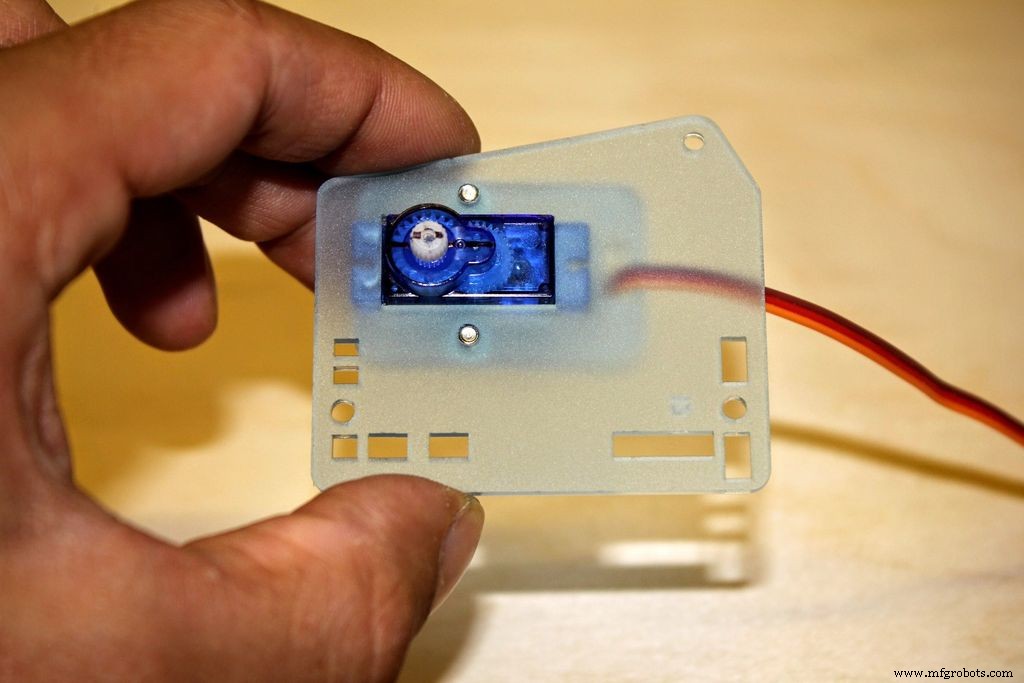
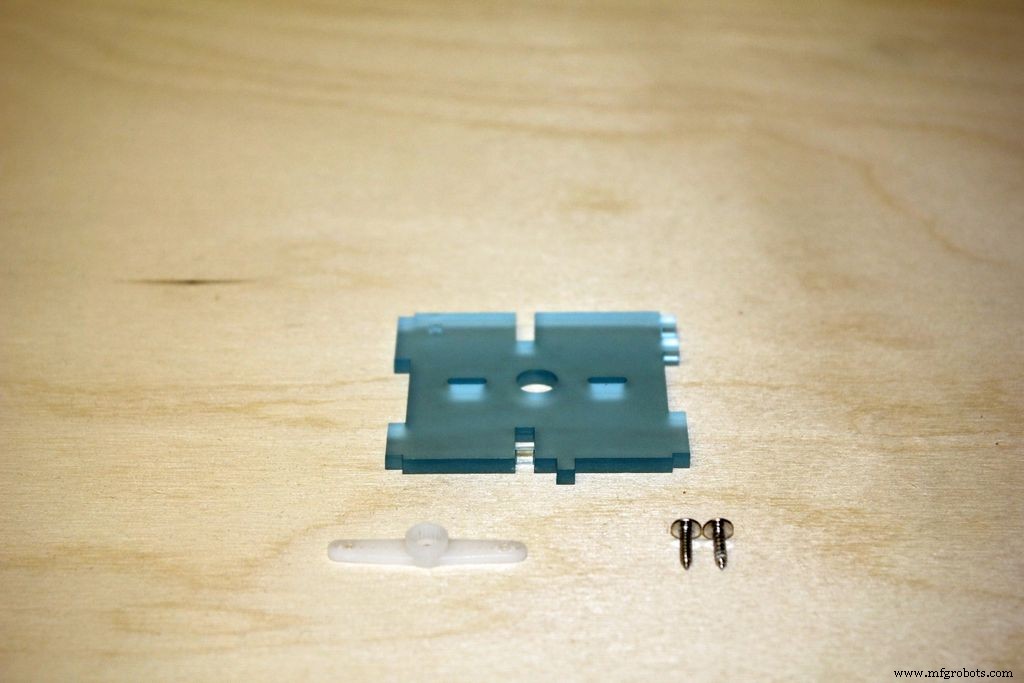
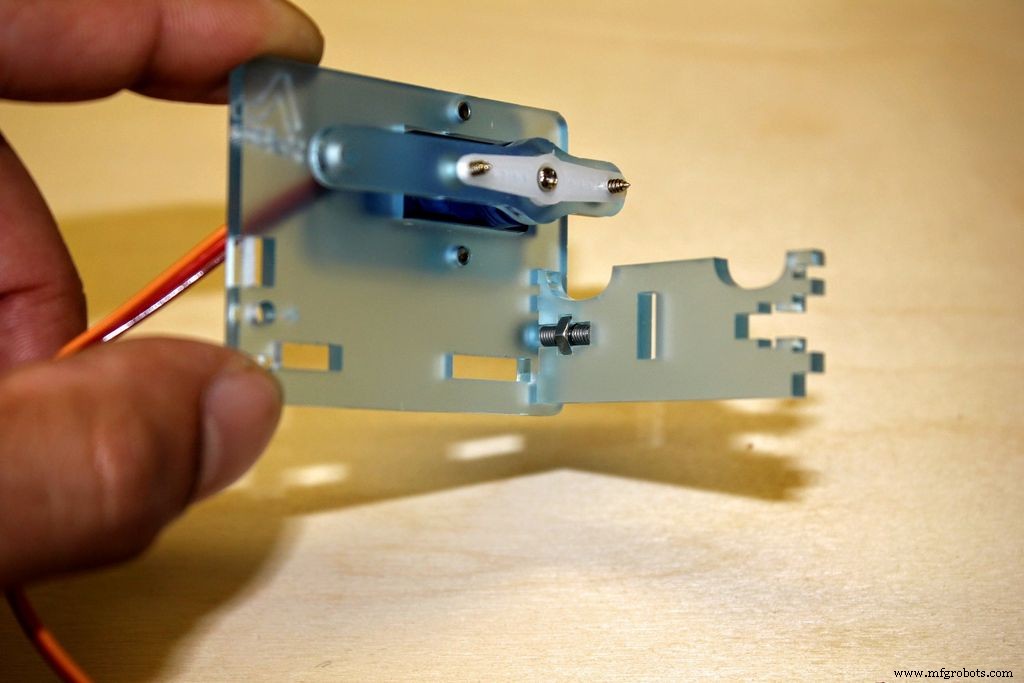
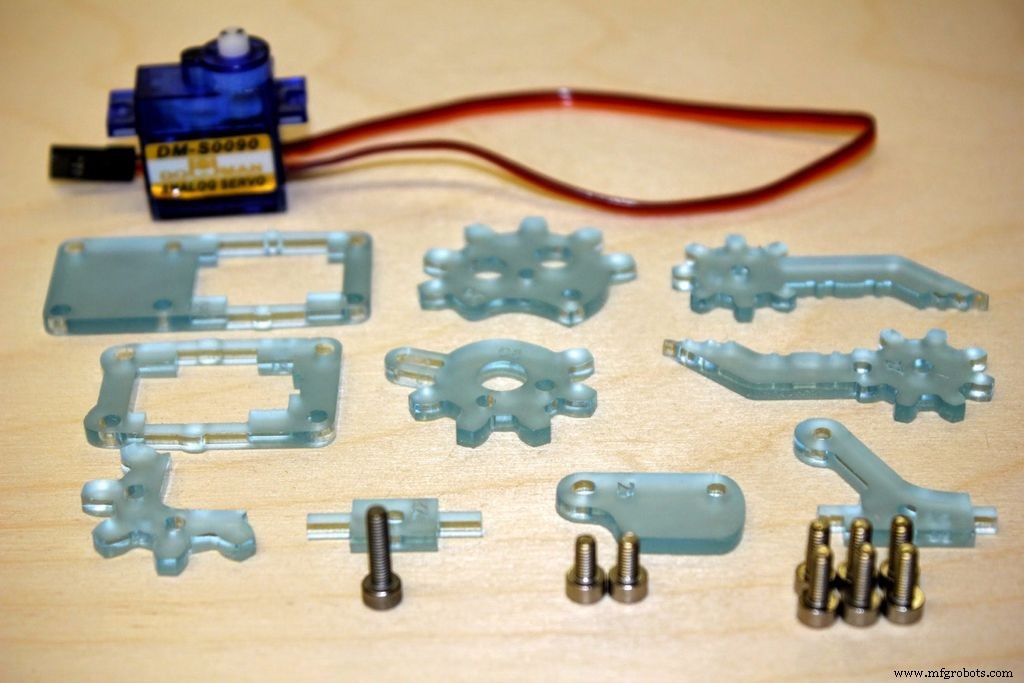
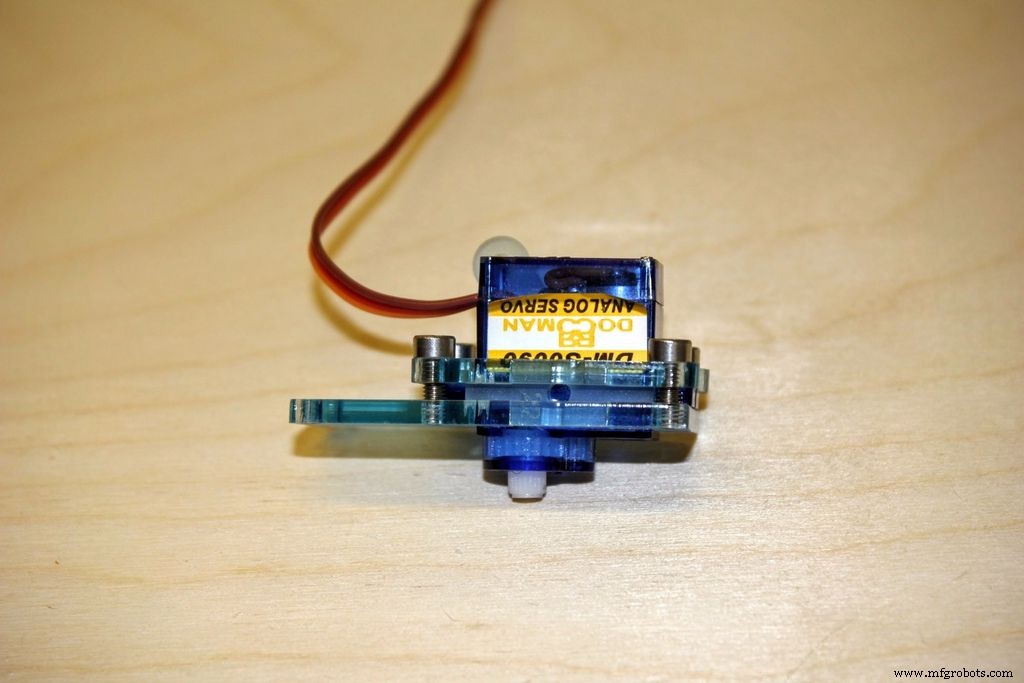
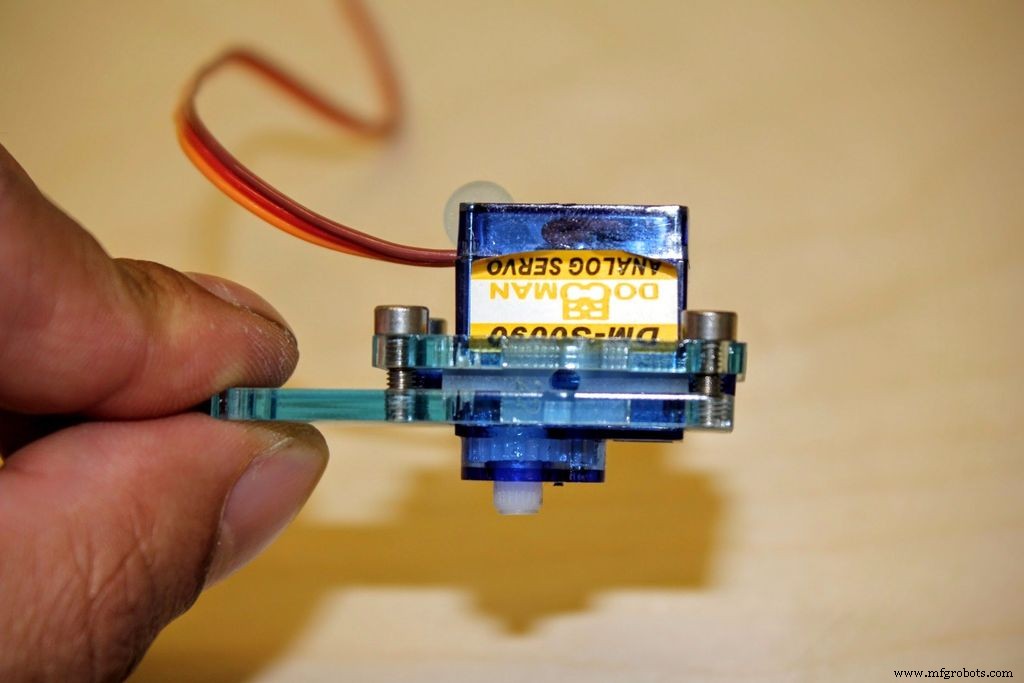
Agora localize as peças # 4, # 5, # 6, servo esquerdo, dois parafusos de 8 mm e um pacote de fixação do servo.
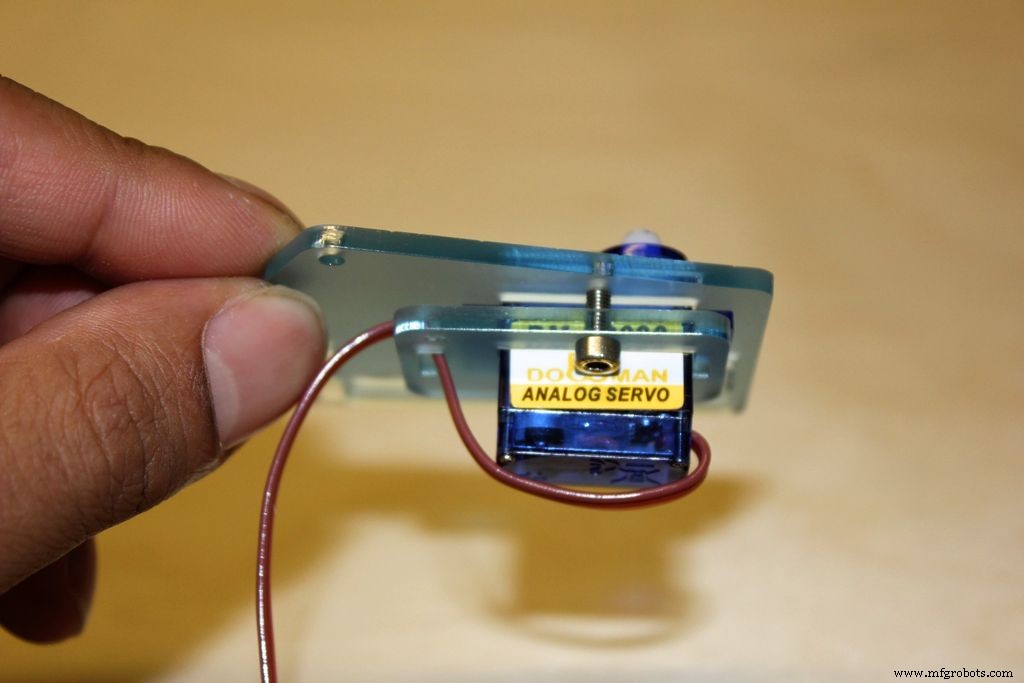
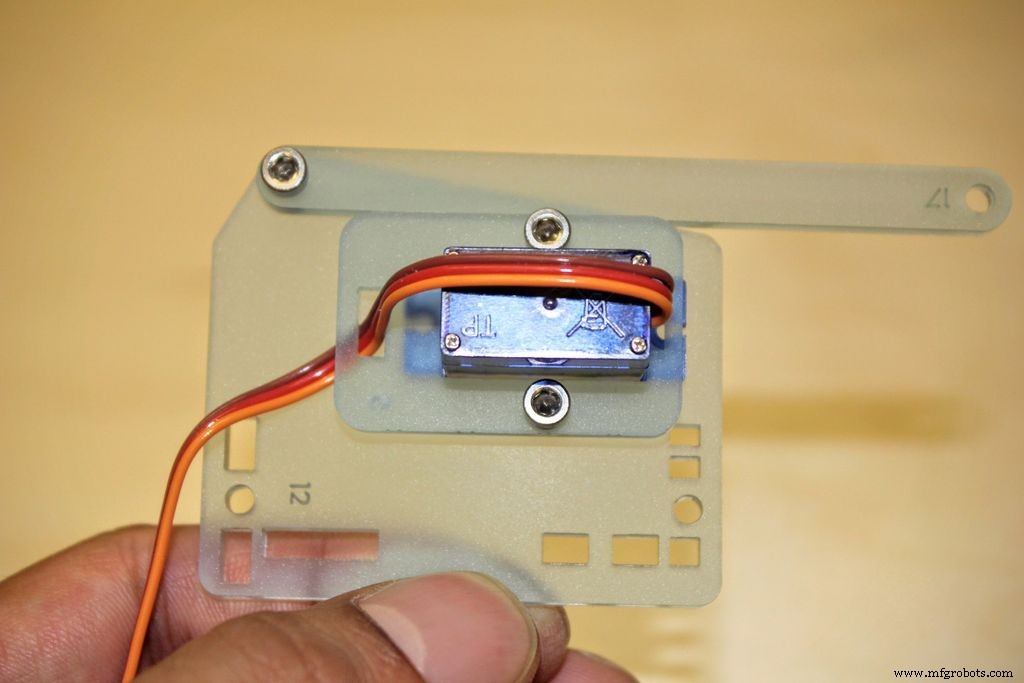
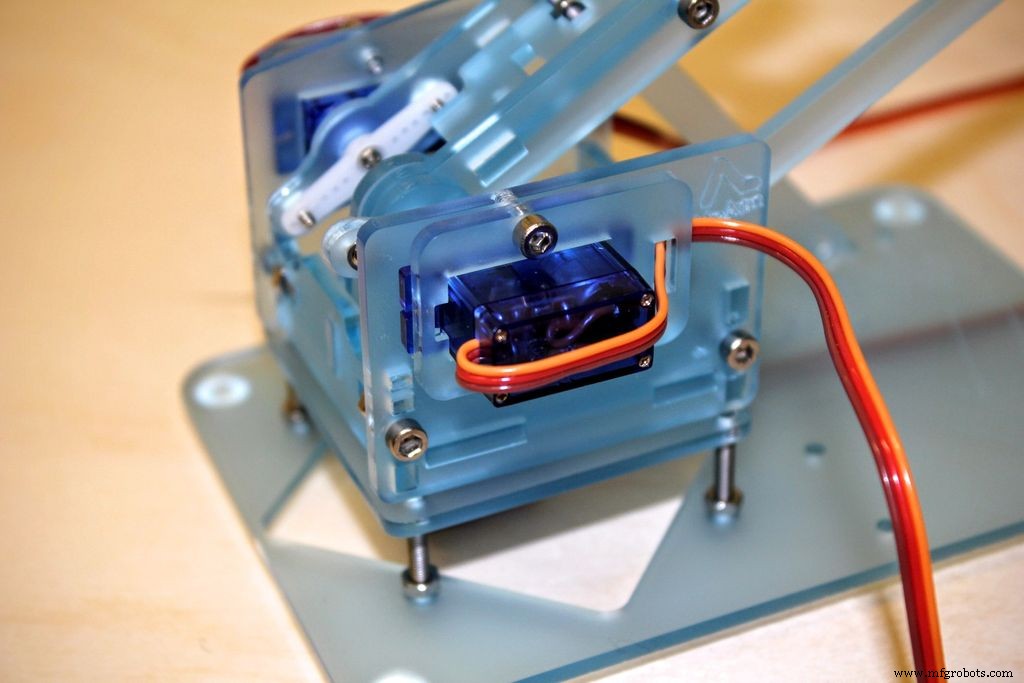
Passe o servo através do colar (parte # 5) e, em seguida, o cabo do servo através do orifício de limpeza do cabo. Aparafuse o colar à parte 4 usando os parafusos de 8 mm tomando cuidado para não apertar demais . Você não quer que o acrílico dobre, apenas segure o servo no lugar.
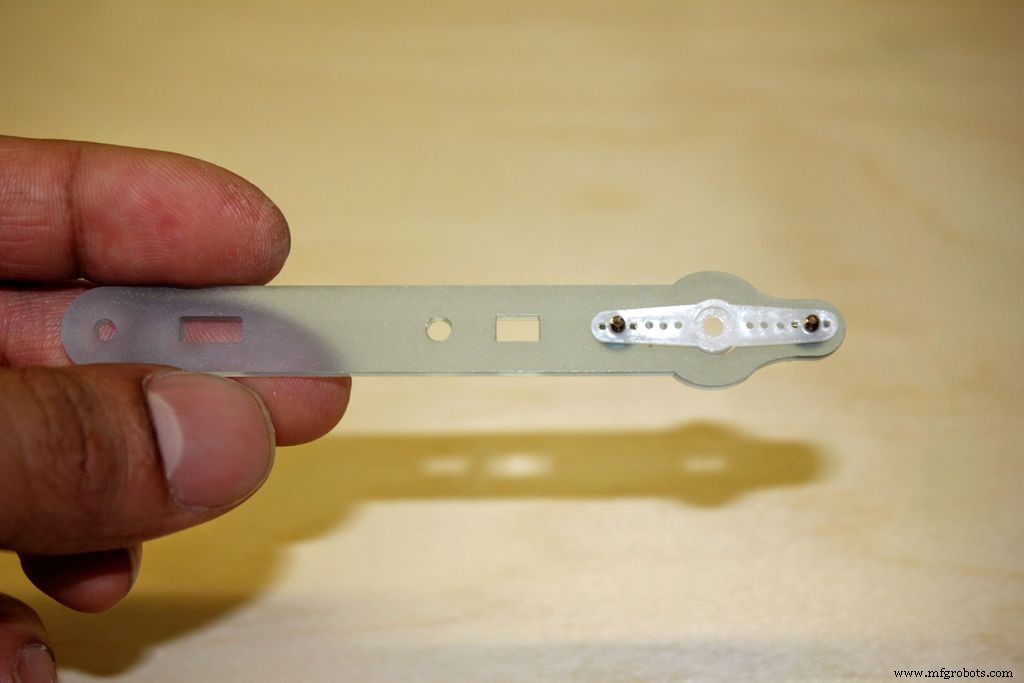
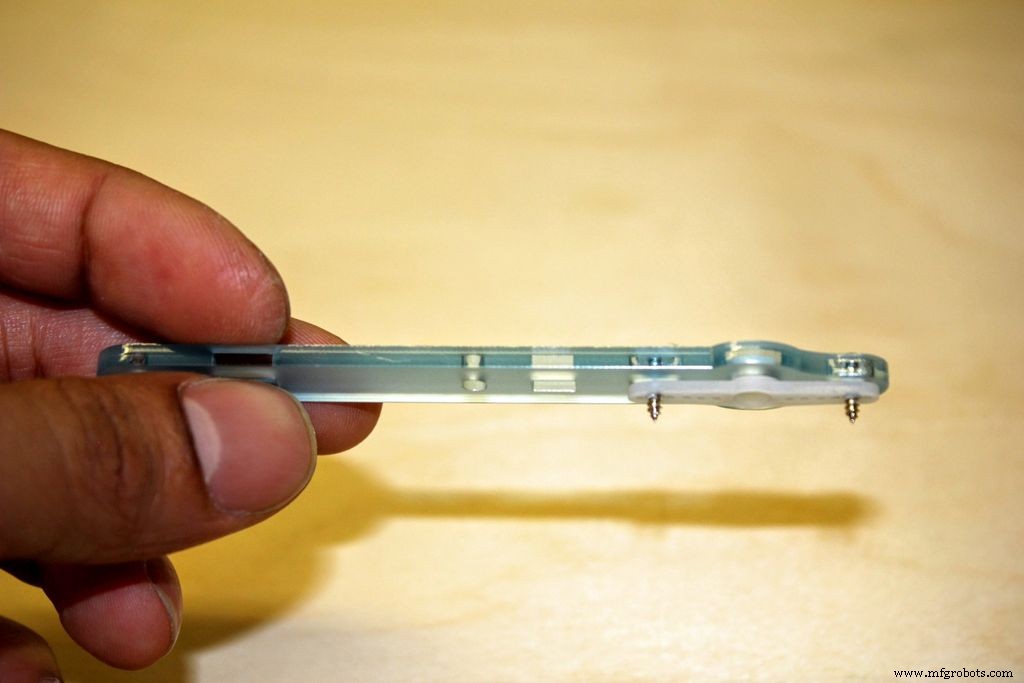
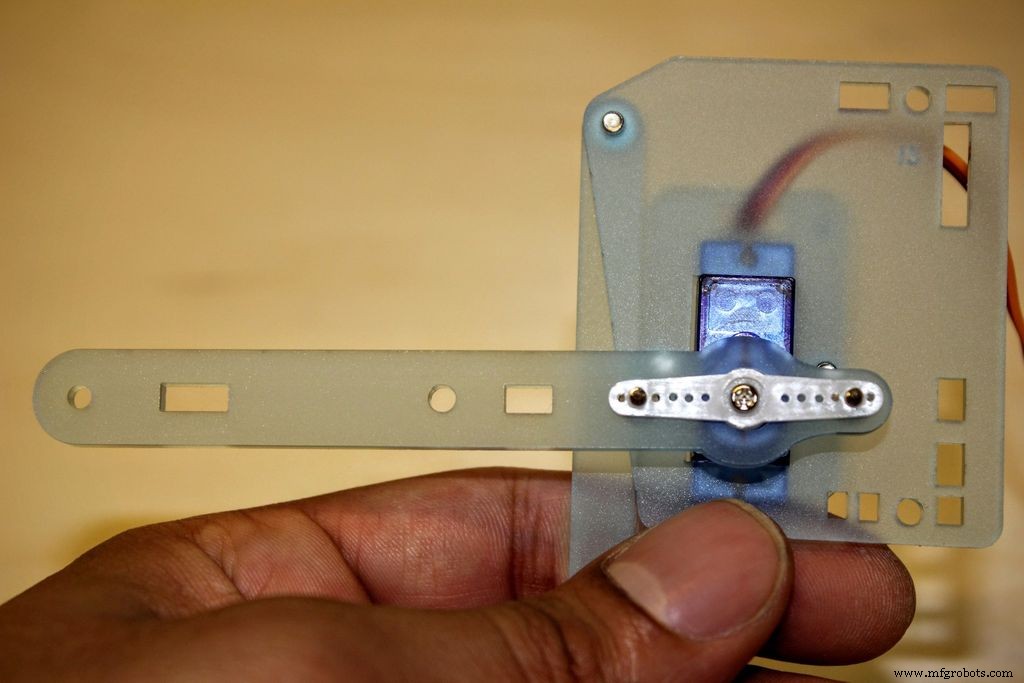
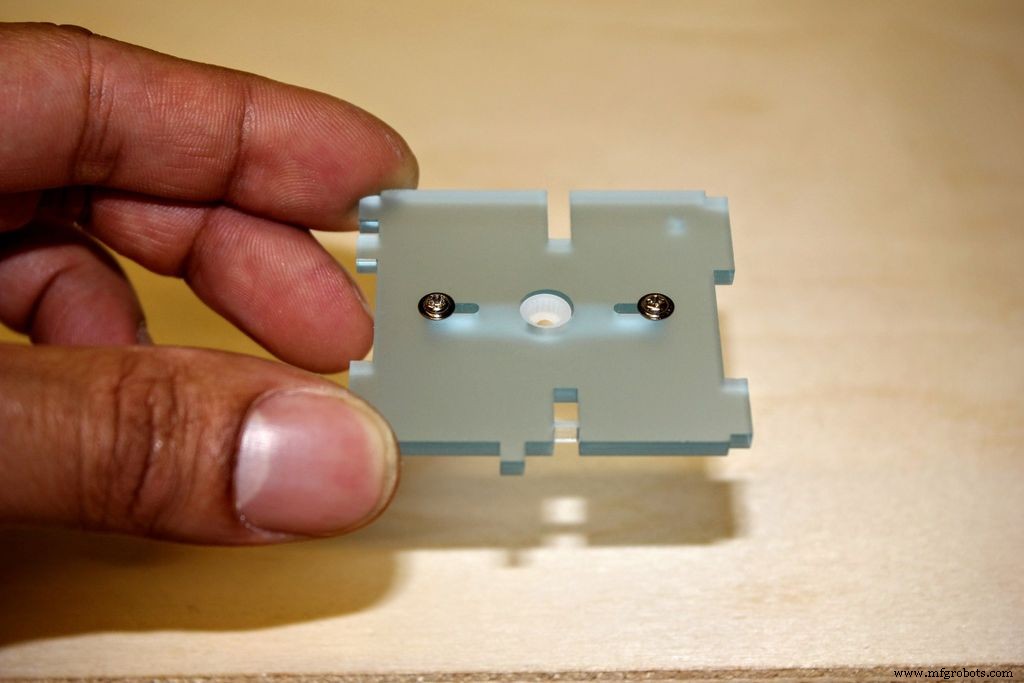
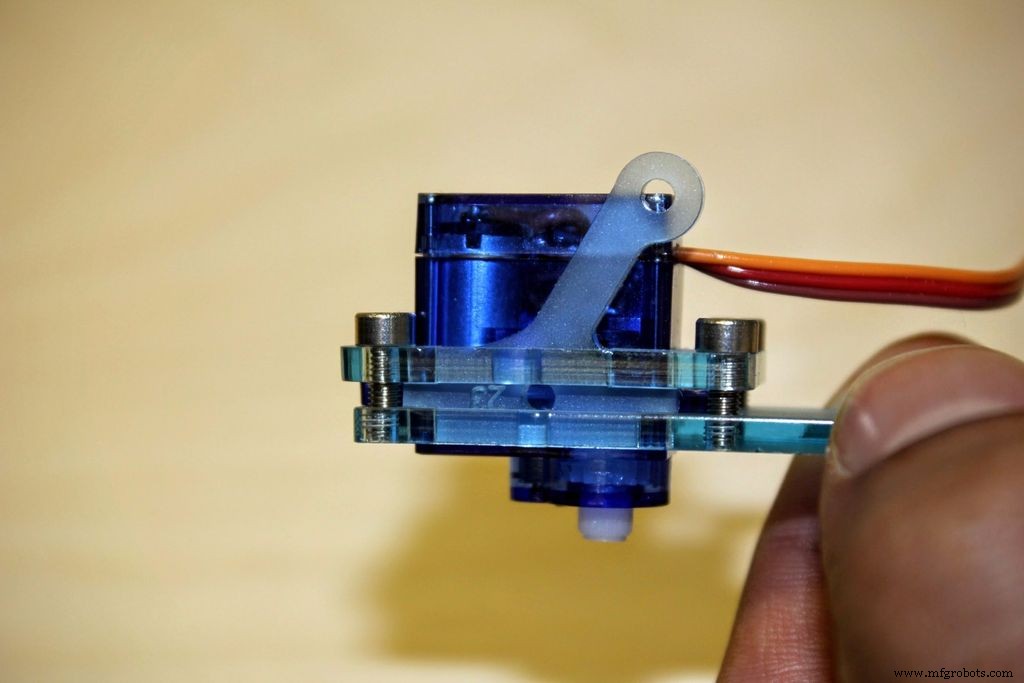
Agora prenda a fixação do servo (a coisa branca, eles são chamados de chifres) ao braço do servo (# 6) usando os parafusos afiados do pacote de fixação do servo. Eles se auto-tocarão na buzina do servo de plástico branco. Eles podem ser um pouco complicados, então tenha cuidado aqui. Se você está construindo com uma criança, então é hora de se envolver.
Fixe a fixação do servo ao seu servo calibrado conforme mostrado, ele deve estar paralelo ao lado mais longo da parte 4 e as linhas que você desenhou anteriormente ainda devem coincidir. Usando o pequeno parafuso de máquina do pacote do servo, prenda-o ao servo, mas novamente não aperte demais!
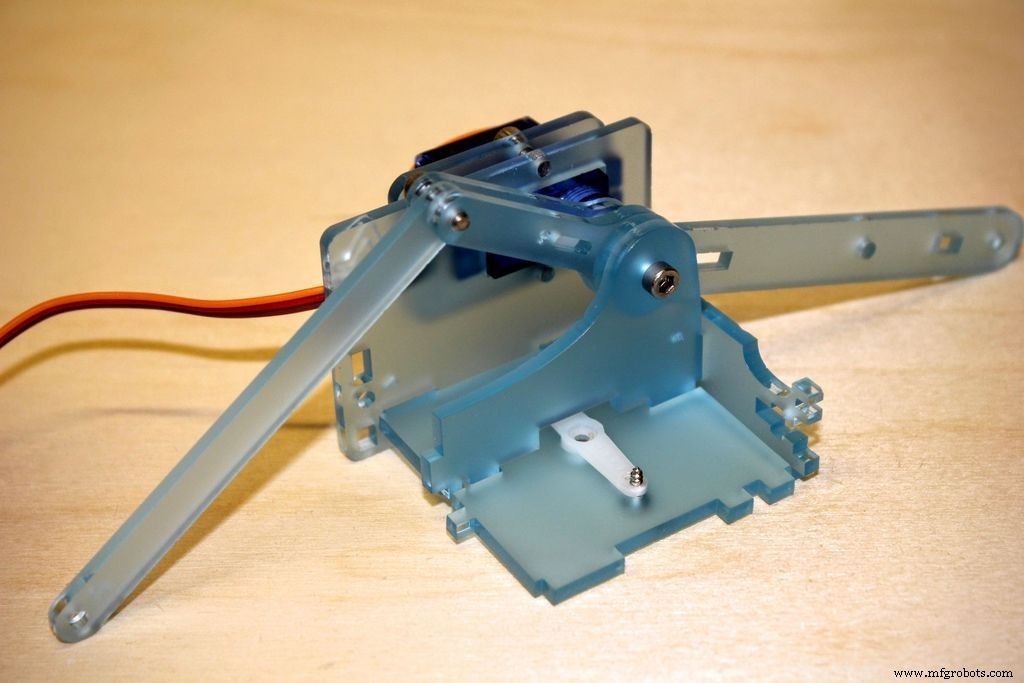
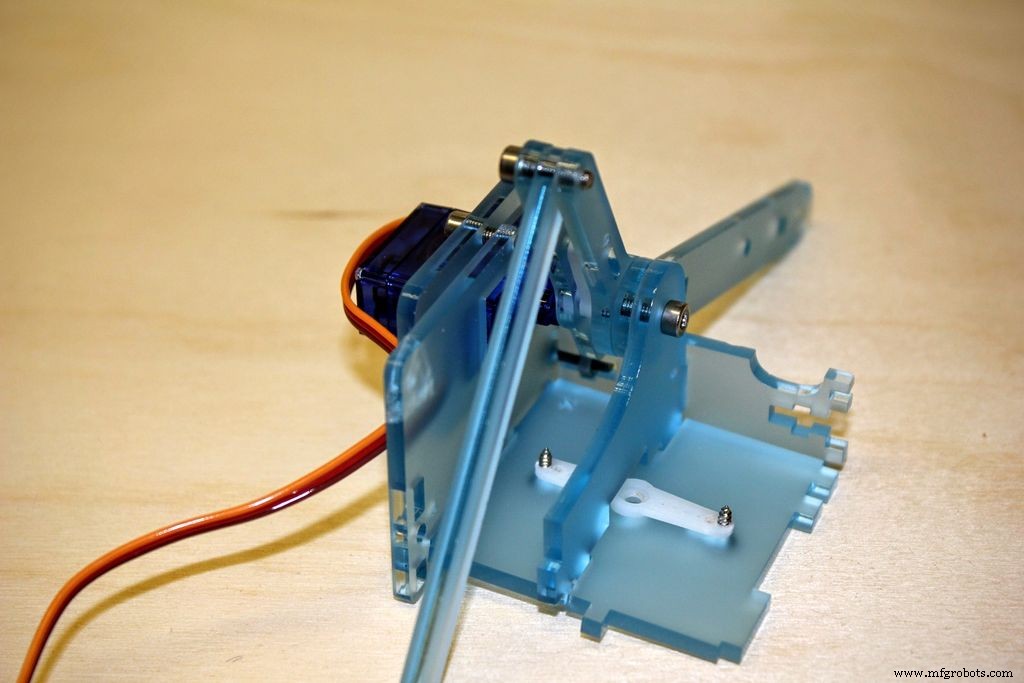
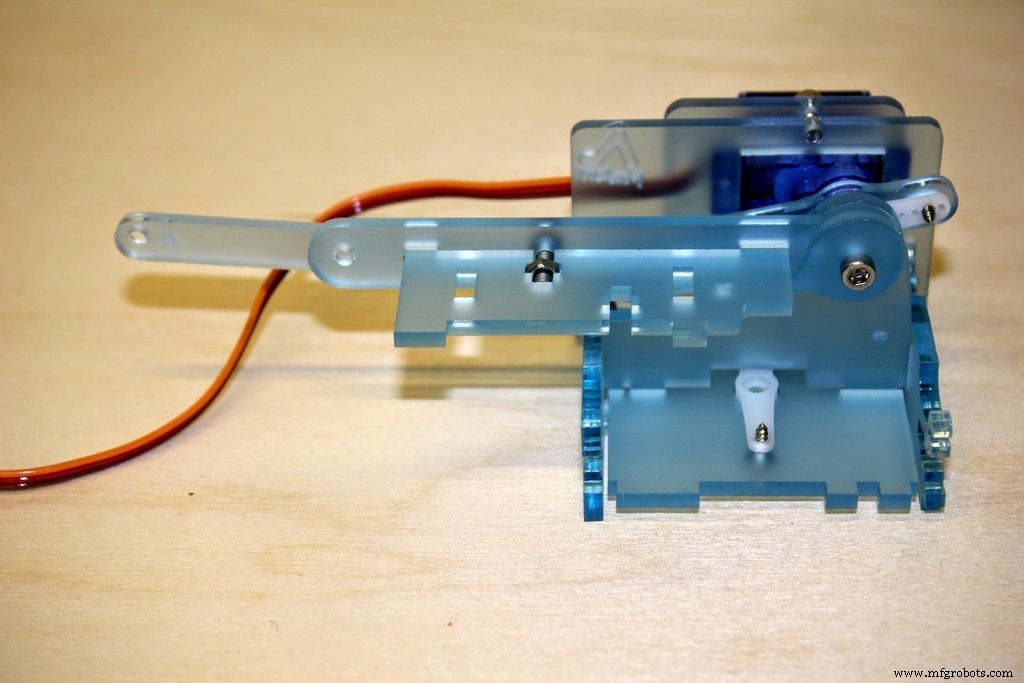
Etapa 5:lado direito
As peças que queremos aqui são:
# 5, # 12, # 13, # 17, dois parafusos de 8 mm, um parafuso de 6 mm, o servo direito e um pacote de fixações do servo.
Passe o servo pelo colar e o cabo pelo cabo arrumado como antes, prenda à placa lateral com os parafusos de 8 mm, novamente tomando cuidado para não quebrar a placa apertando demais. Prenda o chifre servo branco ao braço servo (# 13) usando os parafusos afiados como antes. Prenda-o ao servo com o braço a 90 graus do lado mais comprido da placa lateral. Mais uma vez, as linhas pretas que você fez devem estar alinhadas.
Finalmente, neste estágio, prenda a peça nº 17 à placa lateral usando o parafuso de 6 mm.
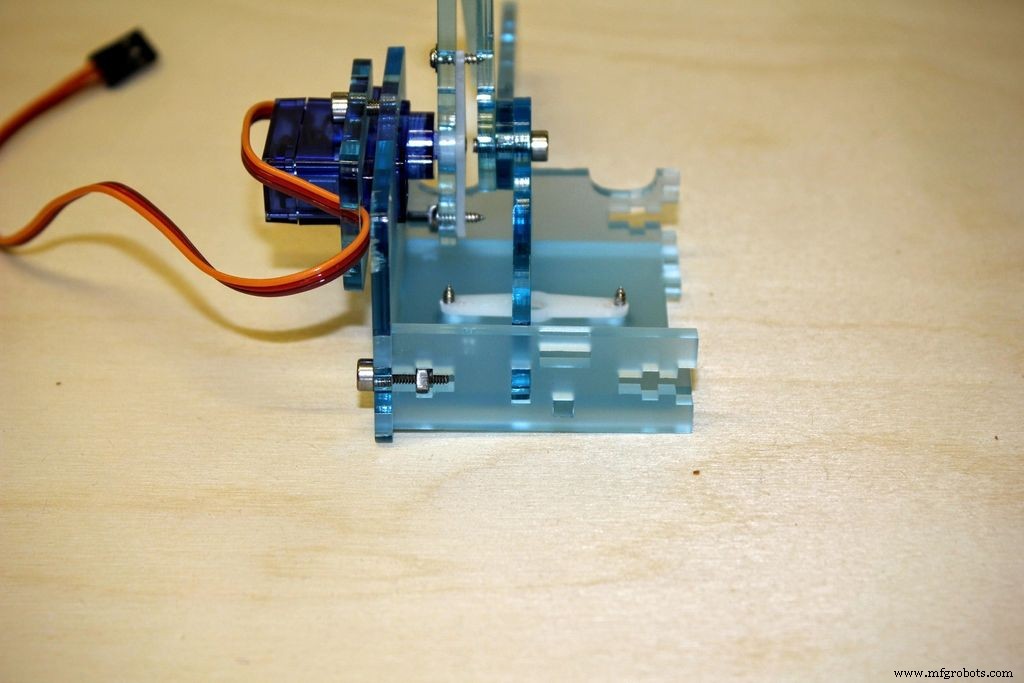
Etapa 6:construir o meio
Essas partes unem as seções esquerda e direita. Nós os chamamos de base e porco.
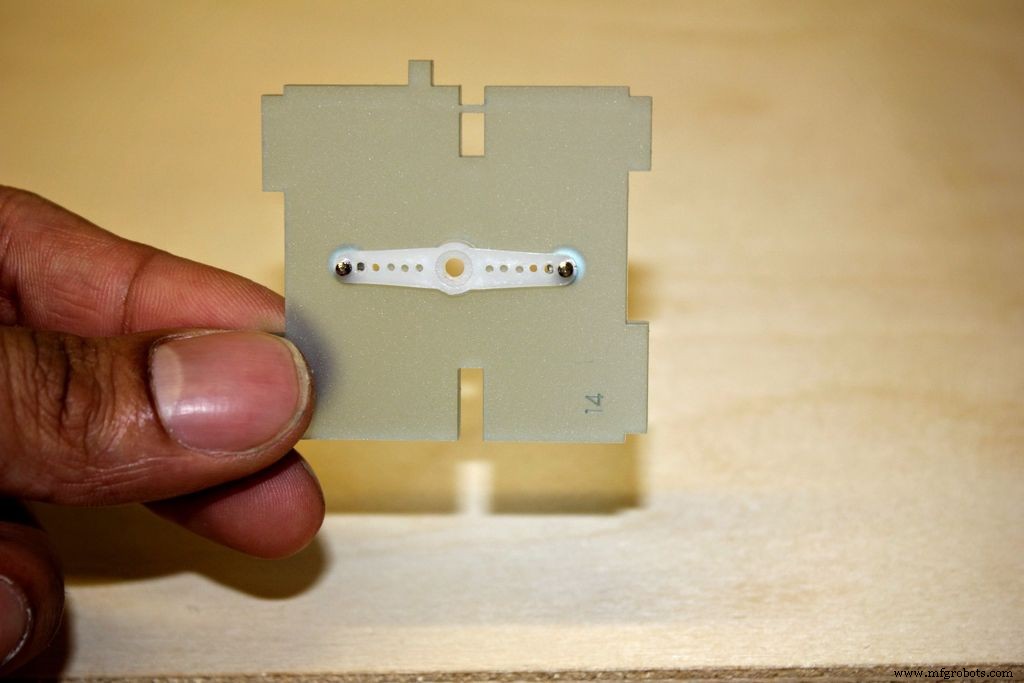
Para a base, localize a peça nº 14 e um pacote de fixações servo. Observando cuidadosamente a orientação, prenda o chifre do servo usando os parafusos afiados. Neste estágio, ofereça até a peça do lado esquerdo para ver se você acertou as coisas. O Poka-yoking deve mostrar o caminho até aqui.
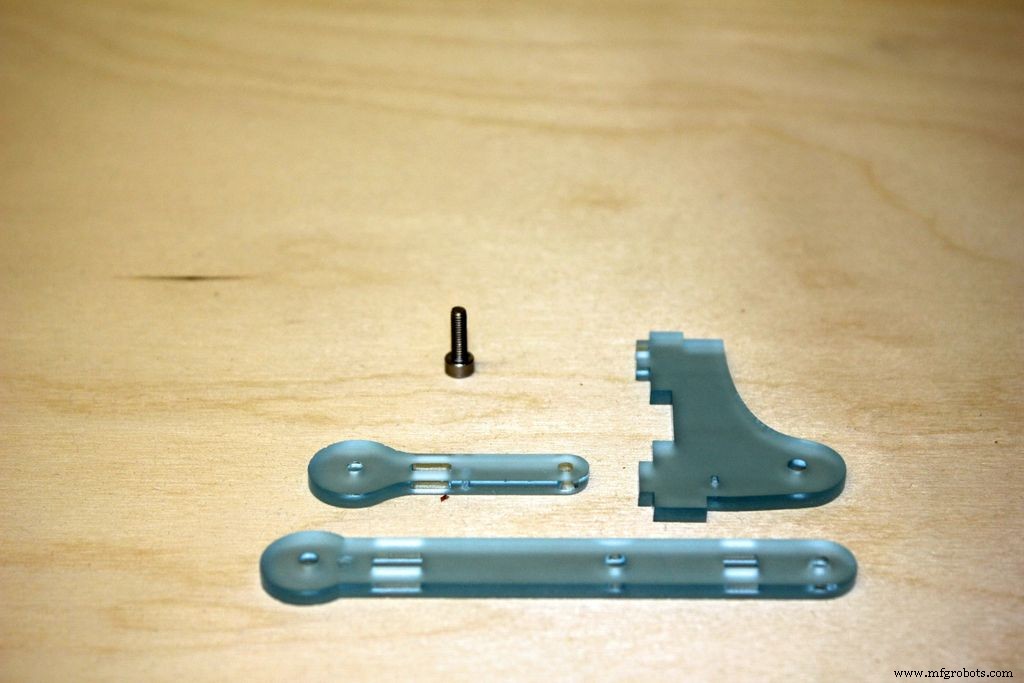
Para o porco, encontre as peças # 8, # 9, # 10 e um parafuso de 10 mm. Aparafuse-os na ordem mostrada, que deve ser # 9, # 10, # 8 com o parafuso vindo do lado # 8 e auto-roscando no # 9. Desculpe, a ordem disso é confusa, mas, honestamente, esta é a primeira vez que escrevo isso com os números! É importante que eles se movam em torno do eixo (o parafuso) em um caminho reto e que se movam livremente. Se eles não se moverem em uma trajetória reta, então desparafuse, segure-os juntos e aparafuse novamente para que fiquem o mais paralelos possível.
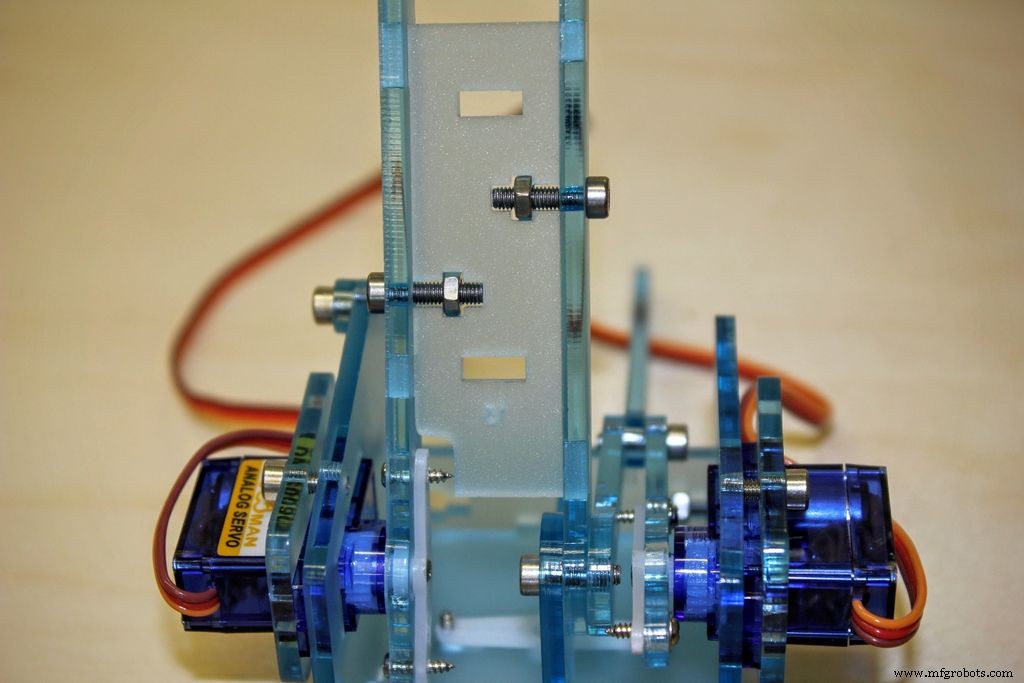
Etapa 7:da esquerda para o meio
Agora queremos começar a juntar as partes esquerda e direita usando as partes intermediárias.
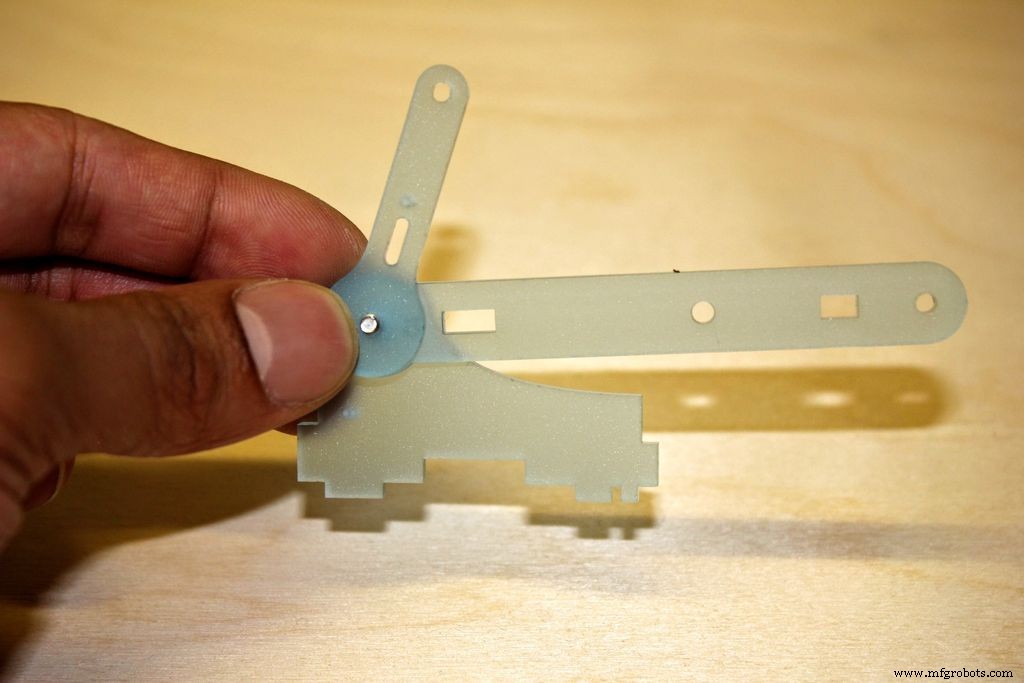
Primeiro prenda o conjunto esquerdo à peça nº 7 com um parafuso e uma porca de 12 mm. A maneira mais fácil de fazer isso é empurrar o parafuso de 12 mm pelo conjunto esquerdo e colocar a porca em meia volta ou mais. Coloque a ranhura na parte nº 7 sobre a porca e comece a apertar o parafuso. Não apertar demais.
Você deve ver a ranhura para o porco na peça nº 7 (o suporte dianteiro). Coloque o pig na ranhura e, em seguida, insira a parte da base nas ranhuras do conjunto esquerdo e levante a alavanca para unir as ranhuras no pig. Verifique o chifre do servo aqui, se você o tiver virado de cabeça para baixo, ficará realmente irritado mais tarde.
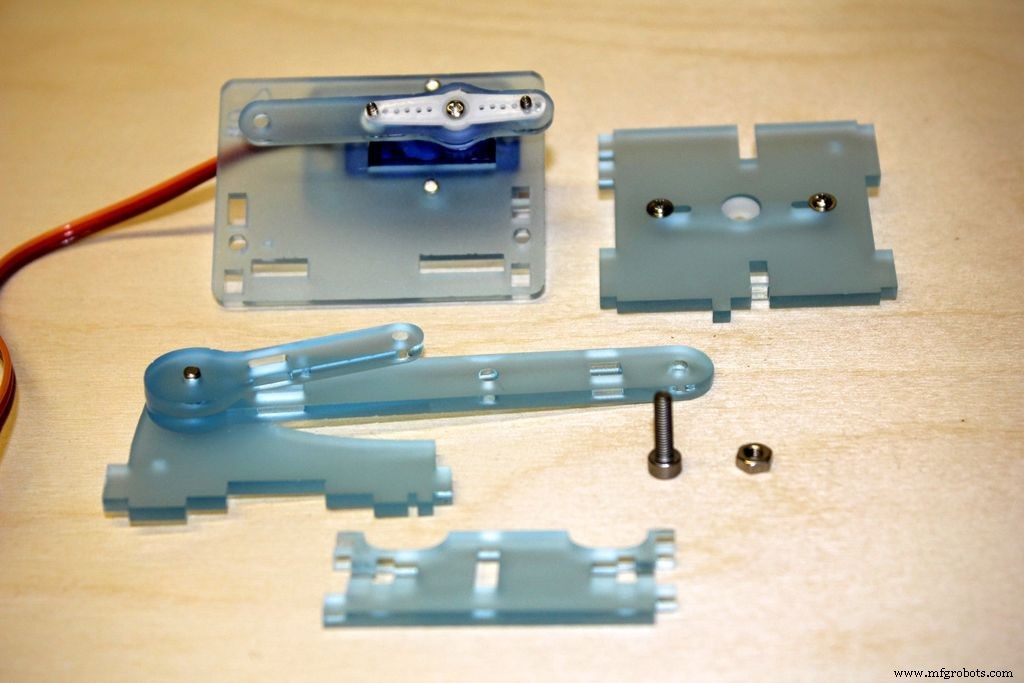
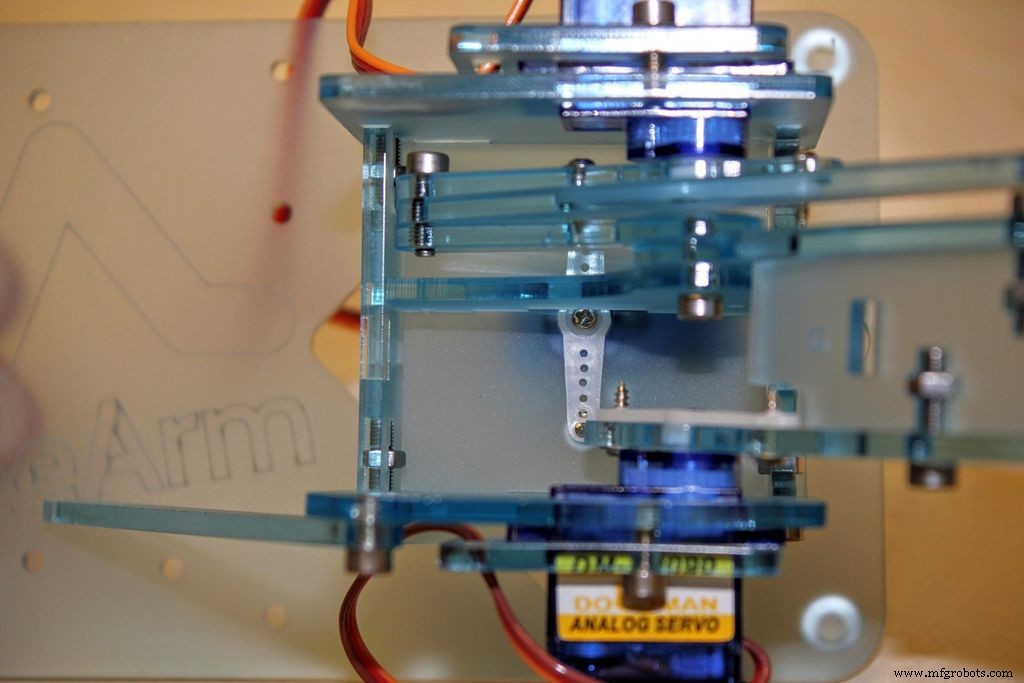
Com o pig no lugar, você pode anexar uma alavanca (# 17), um espaçador opcional (# 20) para a alavanca servo (# 6) e a alavanca no pig (# 9) junto com um parafuso de 12 mm ou 10 mm dependendo se você precisa do espaçador. Os servos Doman vistos aqui não requerem um espaçador, mas os servos mais recentes que usamos, sim. Existem peças sobressalentes em nosso pacote para esta finalidade.
Agora prenda o suporte traseiro, parte # 11 usando um parafuso de 12 mm e porca como no suporte dianteiro. Ele deve se encaixar na parte traseira do porco e também no botão na placa de base. Aperte, mas deixe um pouco de folga, pois o ajuste será útil quando você estiver ajustando a parte da mão direita.
Etapa 8:Anexe à direita
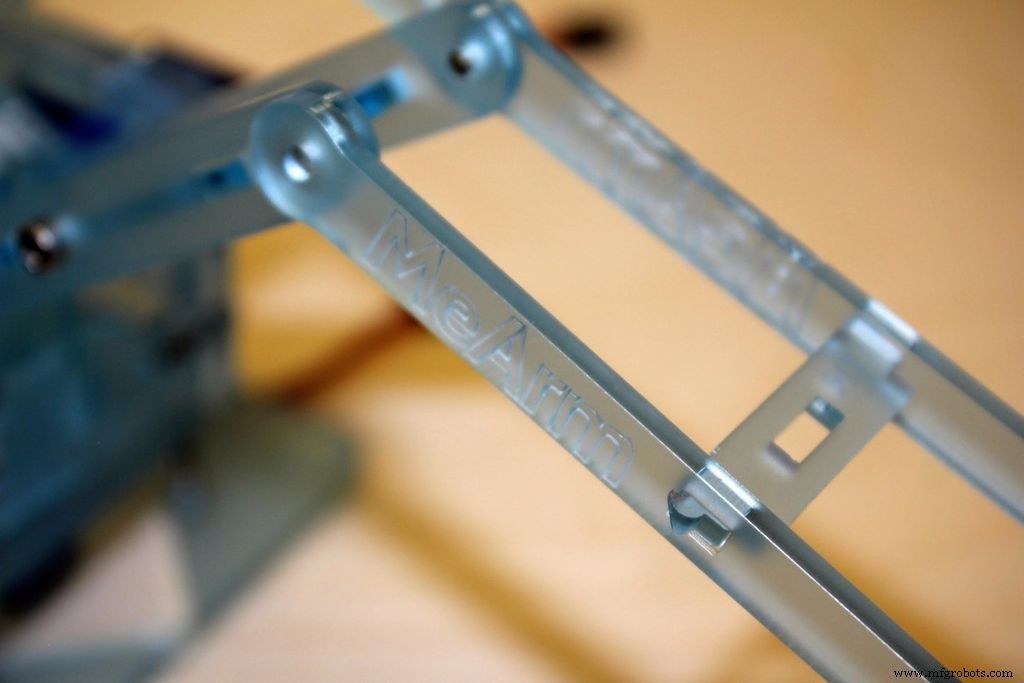
Agora, posicionamos o lado direito de nossa montagem complexa, isso também envolve colocar a parte # 15 da correia.
Anexe a peça nº 15 à peça nº 10 (no pig) usando um parafuso e uma porca de 12 mm.
Agora vem anexando o lado direito ao resto da montagem. Você pode colocar os parafusos e porcas de 12 mm no lado direito antes de tentar encaixar as peças ou pode deixá-los fora e colocá-los depois. Aqui, você está tentando obter várias peças em slots ao mesmo tempo e pode ser complicado
Leve o seu tempo e seja paciente, por favor. Esta etapa é a mais complicada de toda a construção. Depois de fazer isso, ficará mais fácil, eu prometo!
Etapa 9:prenda à base, adicione o antebraço esquerdo
Agora que temos o adorável conjunto central completo, podemos aparafusá-lo na base.
Isso é uma questão de acoplar o chifre do servo ao servo central e prendê-lo com um parafuso.
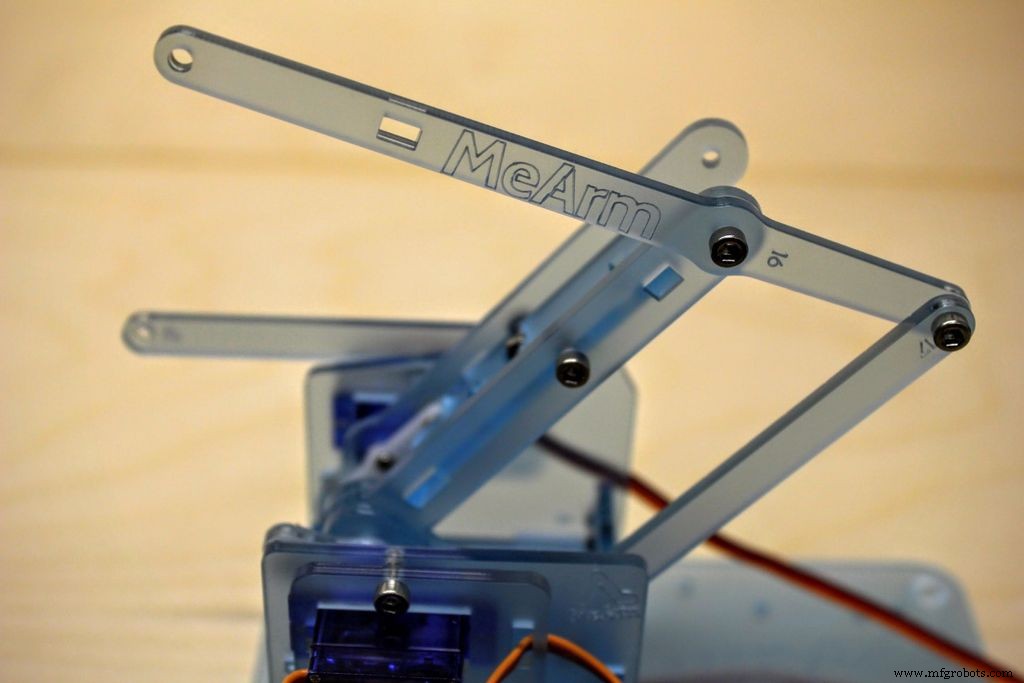
Agora podemos adicionar a parte # 16 com o uso de dois parafusos de 6 mm. Isso será aparafusado na parte 10 e 17. Você deve ser capaz de mover o servo facilmente com esta nova peça!
Etapa 10:antebraço direito


Em seguida, construímos o antebraço certo.
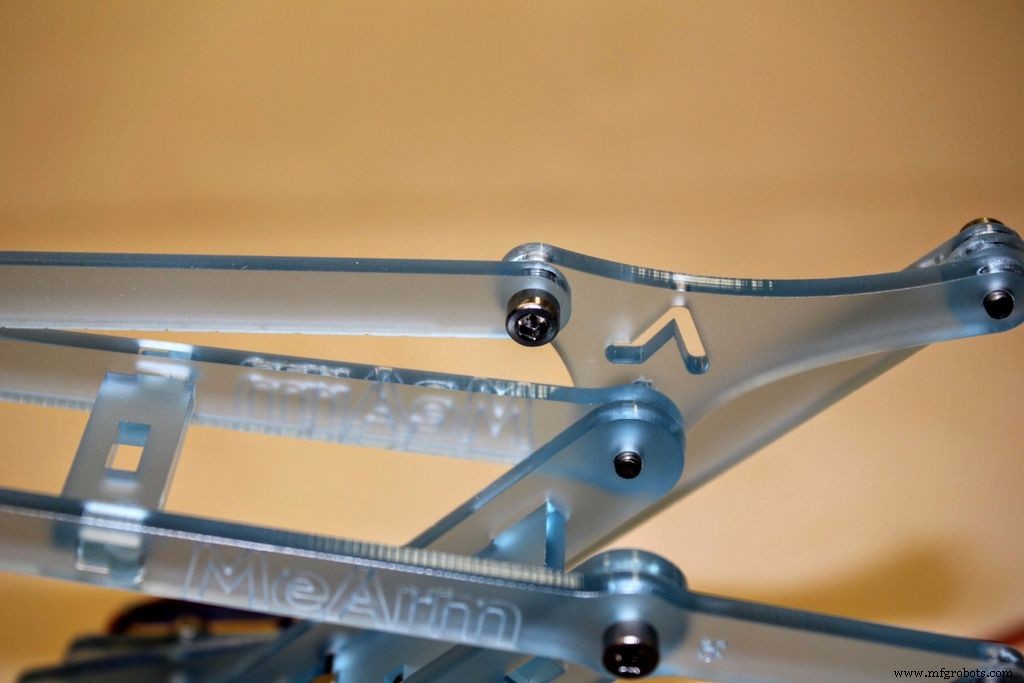
A primeira coisa a fazer é enganchar a parte # 18 no antebraço esquerdo que você acabou de anexar e, em seguida, no antebraço direito, que chamaremos de parte # 31, pois parece que não está numerado!
Fixe a parte triangular nº 19 à peça nº 31 e à peça nº 13 (a broca que está presa ao servo) com um parafuso de 10 mm. Não aperte demais, pois precisamos que todas essas peças se movam livremente.
Fixe a parte traseira da peça nº 19 à peça nº 17 presa à placa do lado direito, use um parafuso de 10 mm e um espaçador (nº 20) no meio.
Em seguida, prenda a peça final nº 17 na parte frontal interna da peça nº 19 com um parafuso de 6 mm.
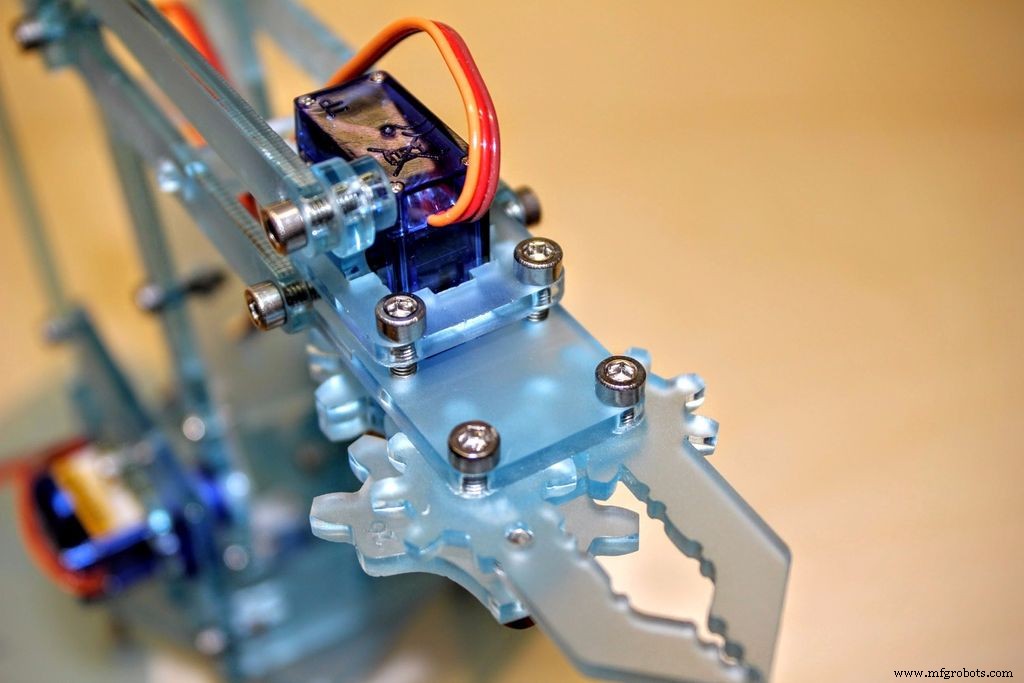
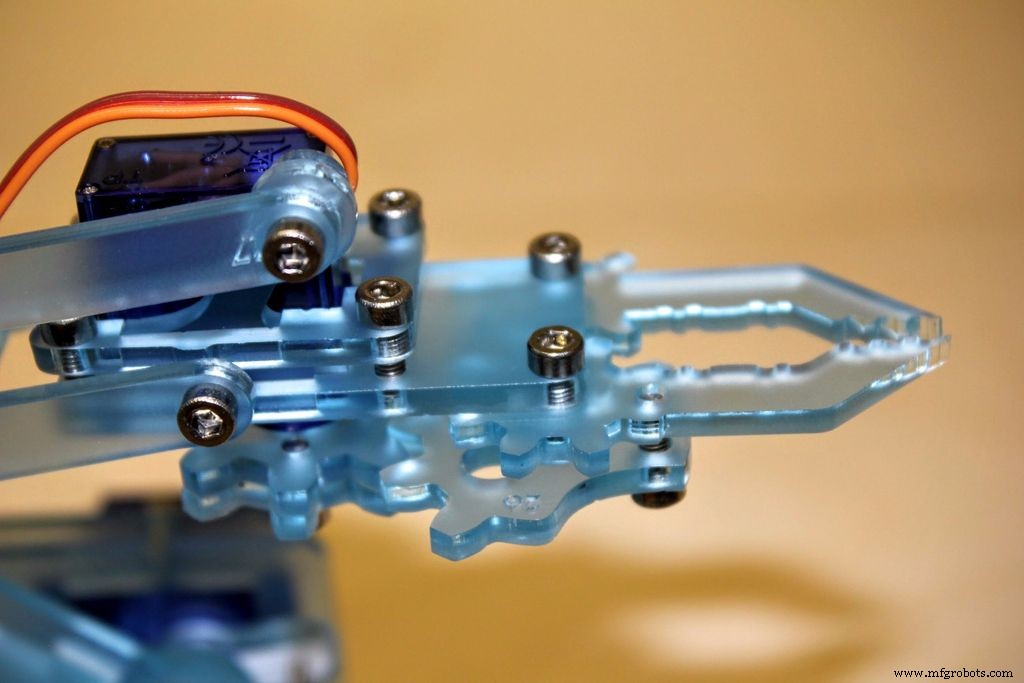
Etapa 11:construir a garra!
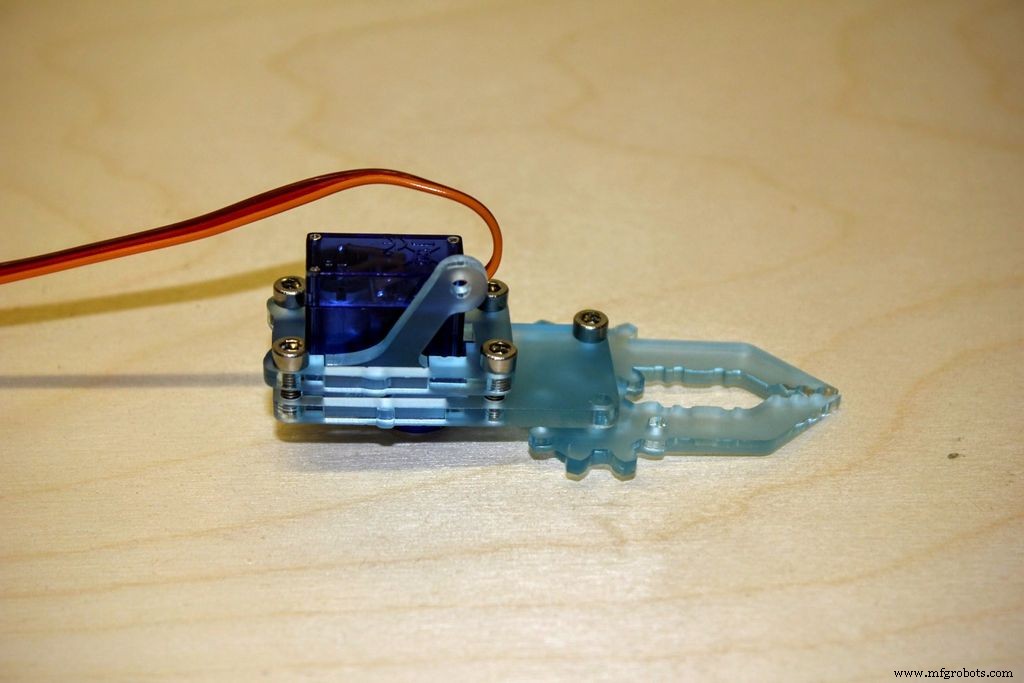
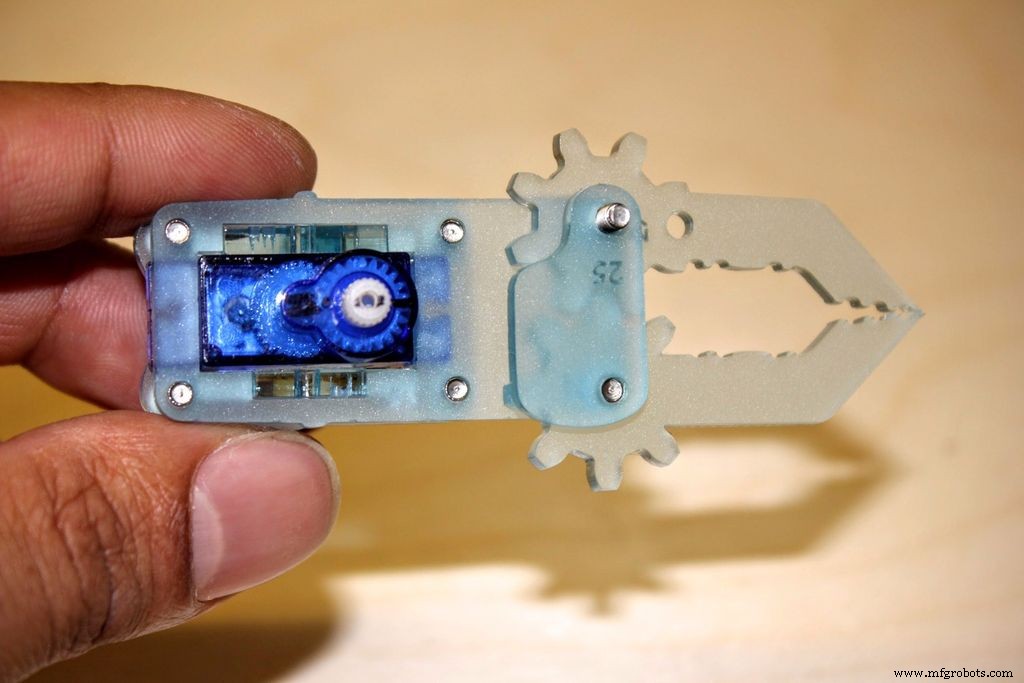
Passe o servo pelo colar restante, # 21. Insira as peças nº 22 e nº 23 nas ranhuras laterais feitas pelo servo e a peça nº 21 e, em seguida, usando a peça nº 24, prenda-as com quatro porcas de 8 mm. Mais uma vez, tome cuidado, estamos quase lá, você não quer quebrar nada.
As próximas peças ficarão um pouco desprotegidas até que o último parafuso esteja no lugar, então não se preocupe se você deixar cair alguma coisa agora. Prenda a peça nº 28 através do orifício esquerdo no conjunto da cabeça com um parafuso de 8 mm na peça nº 25. Em seguida, engrene as engrenagens na peça nº 27 e coloque um parafuso de 12 mm através dela, o conjunto da cabeça e a peça nº 25. Isso ainda não é seguro, mas mantém tudo sob controle.
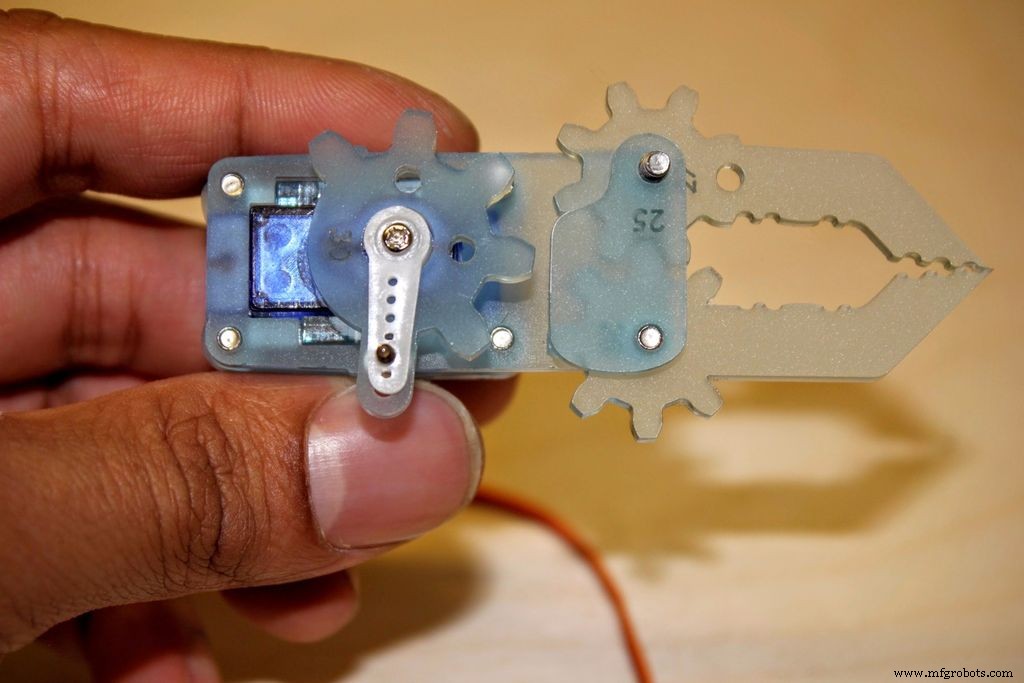
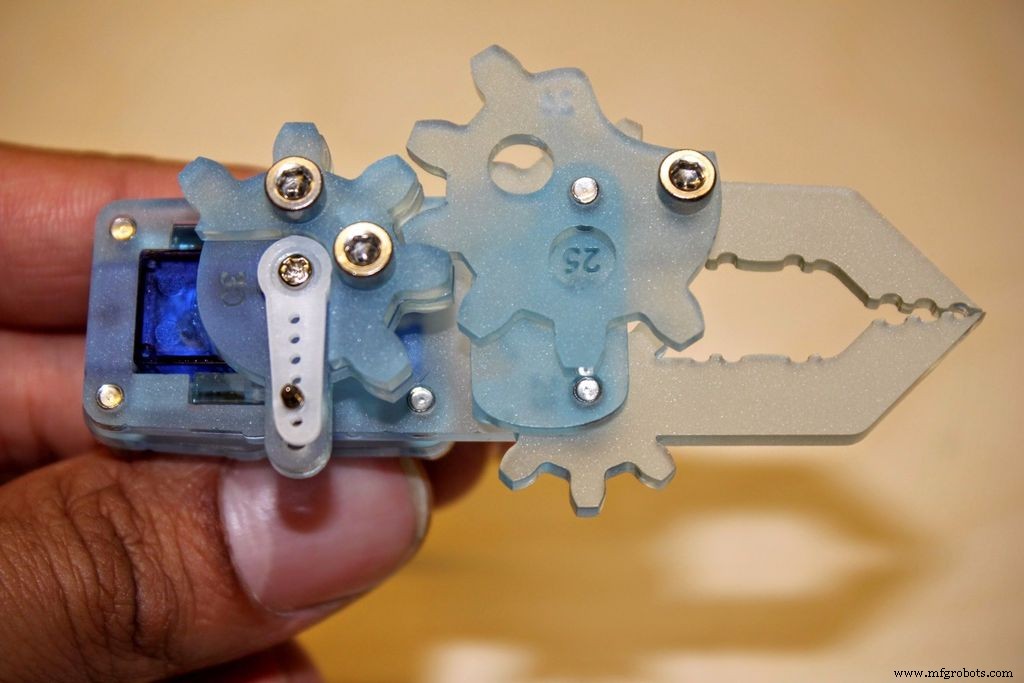
Anexe um chifre de servo à parte # 30 e prenda-o ao servo usando o parafuso da máquina. Prenda o nº 29 no nº 30 usando dois parafusos de 6 mm.
Agora você pode anexar # 26 ao parafuso solto de 12 mm e prendê-lo ao orifício extra na parte # 27 com um parafuso de 8 mm.
Etapa 12:adicione o cabeçote
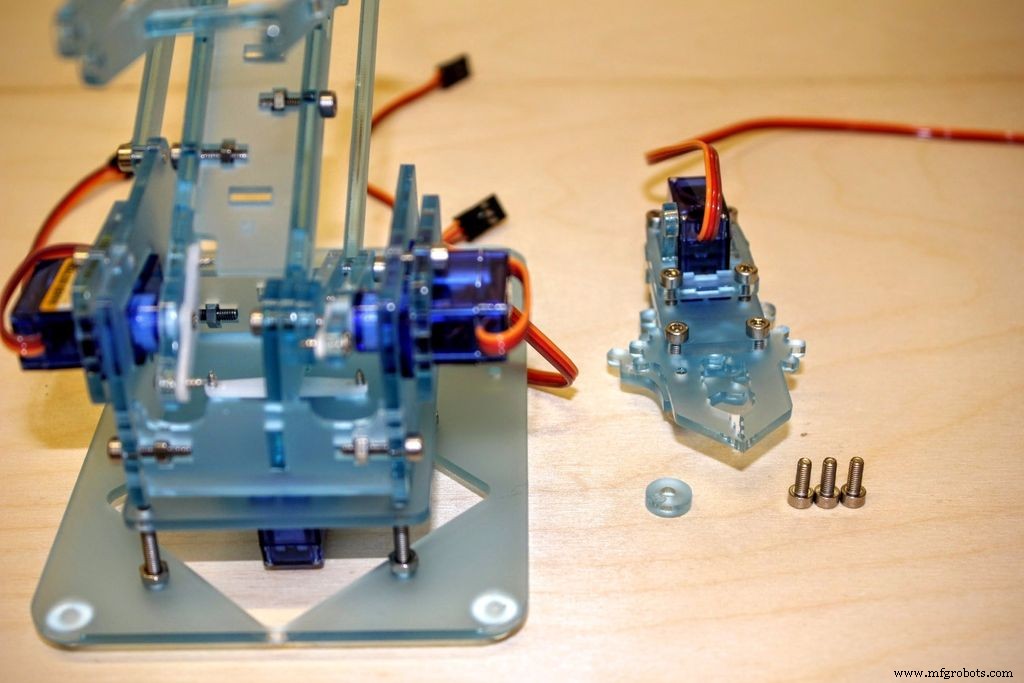
A última parte é prender a cabeça.
Isso é preso por dois parafusos de 8 mm nos antebraços nas partes # 22 e # 23 na cabeça. Isso pode tornar mais fácil afrouxar os parafusos de 8 mm no grampo do servo de cabeça.
Agora ligue e jogue!
Etapa 13:Resolução de problemas
Esta seção será preenchida com o tempo com problemas comuns. Se você tiver um, informe-nos e podemos adicioná-lo.
O braço esquerdo do servo parece travado. Normalmente, isso se resume a uma junta rígida. O conjunto da cabeça é aquele que as pessoas esquecem.
Código
- Arquivo sem título
Arquivo sem título Arduino
#includeServo meio, esquerdo, direito, garra; // cria 4 "objetos servo" void setup () {Serial.begin (9600); middle.attach (11); // anexa o servo no pino 11 ao objeto do meio left.attach (10); // anexa o servo no pino 10 ao objeto esquerdo right.attach (9); // conecta o servo no pino 9 ao objeto certo claw.attach (6); // anexa o servo no pino 6 ao objeto garra} void loop () {middle.write (90); // define a posição do servo de acordo com o valor (graus) left.write (90); // faz o mesmo right.write (90); // e novamente claw.write (25); // sim, você adivinhou atras (300); // não atualiza constantemente os servos que podem fritá-los}
Codebender
https://codebender.cc/sketch:148456Peças personalizadas e gabinetes
Processo de manufatura
- Robô Gantry:Automatize seus maiores aplicativos
- Whitepaper:Como Encontrar o Potencial do Seu Robô
- A Importância da Segurança do Robô em Seu Chão de Fábrica
- Construindo seu próprio braço robótico:você deve assumir o risco?
- Robô SCARA de braço duplo
- Braço do robô controlado por Ethernet
- Littlearm 2C:Construir um braço de robô Arduino impresso em 3D
- Webinar:automatize seu processo com o Techman Robot
- Centro de giro equipado com braço robótico
- Robot combina braço robótico colaborativo com plataforma móvel