


Barra de pull-up inteligente
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 3 | |||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Ferramentas e máquinas necessárias
 |
| |||
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto

Olá amigos! Meu nome é Nikolas e tenho 15 anos. Hoje, neste tutorial, vou mostrar como fazer uma barra de pull-up inteligente usando um Arduino Nano que, quando você começa a fazer flexões ou abdominais começa a tocar música para mantê-lo motivado e após se exercitar por um determinado período, uma recompensa , um Tic Tac , no meu caso é dispensado! Certifique-se de assistir ao vídeo do YouTube acima para ver a barra de pull-up inteligente em ação e seguir as instruções de lá, se preferir!
Originalmente, pensei em fazer isso para me motivar a malhar mais, mas descobri que só queria uma desculpa para comer mais doces!
Também gostaria de agradecer ao Arduino, pois este projeto foi selecionado como um dos vencedores do Arduino Day Community Challenge 2021 !
Etapa 1:entenda como funciona


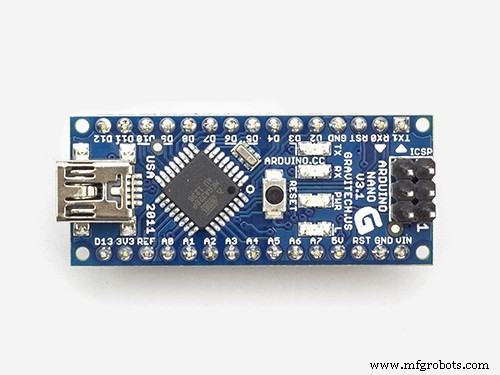
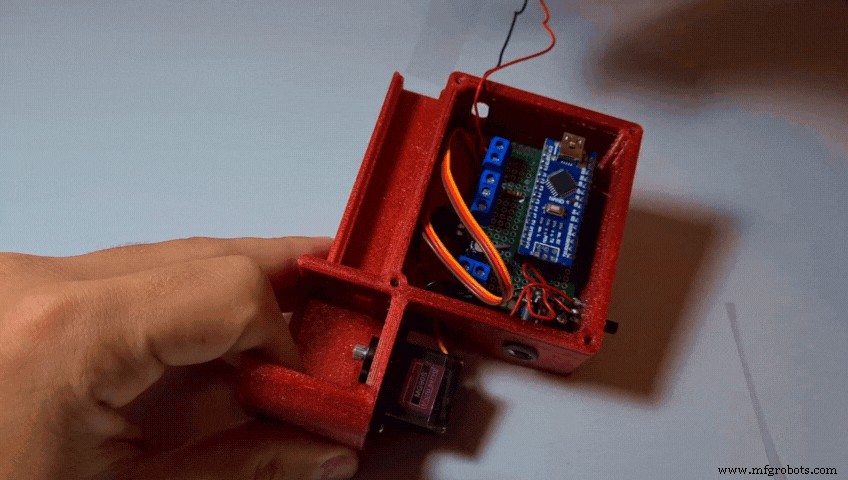
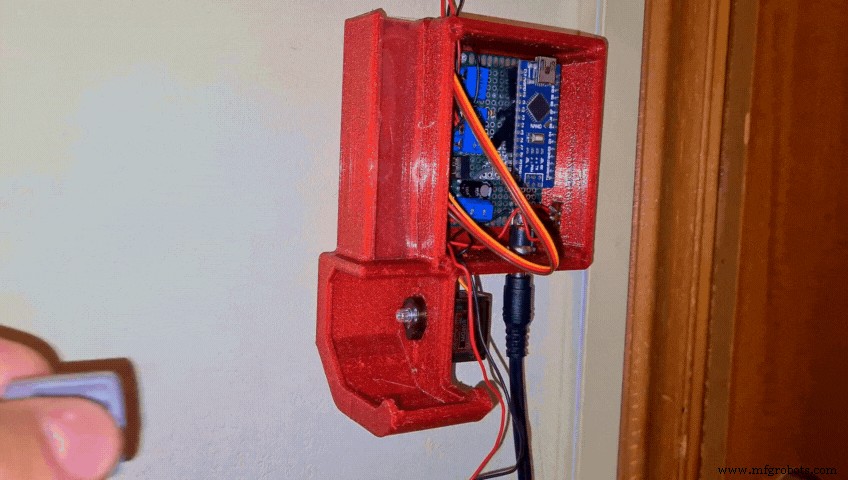
Basicamente, eu fiz um sensor de feixe de laser conectando um diodo laser barato e um LDR na barra pull-up. Eles estão perfeitamente alinhados, o que significa que muita luz atinge o LDR e, portanto, o sensor emite um alto valor analógico. No entanto, assim que coloco minhas mãos na barra para começar a malhar, eu bloqueio o feixe de luz, o valor fica significativamente mais baixo e o sensor envia um sinal para o Arduino Nano, que é montado na parede em um gabinete e, em seguida, uma música começa a tocar usando um pequeno alto-falante (no meu caso foi Leve em mim por A-ha). Depois de cerca de 30 segundos, quando a música terminar, se eu ainda tiver minhas mãos na barra, uma recompensa, um Tic Tac é dispensado usando um mecanismo impresso em 3D que é girado por um servo!
Agora que você entendeu como funciona vamos começar a fazer !
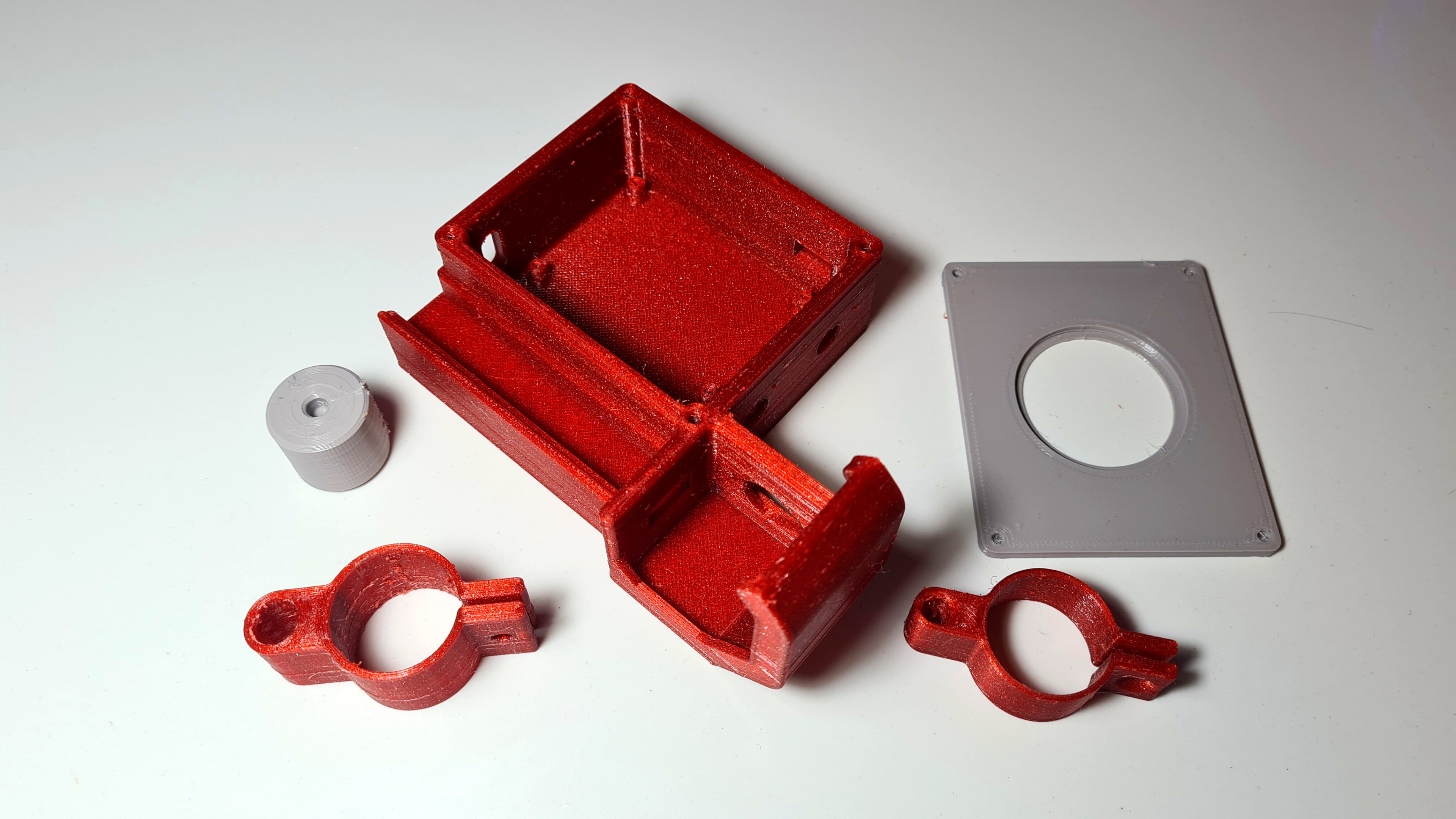
Etapa 2:Impressão 3D
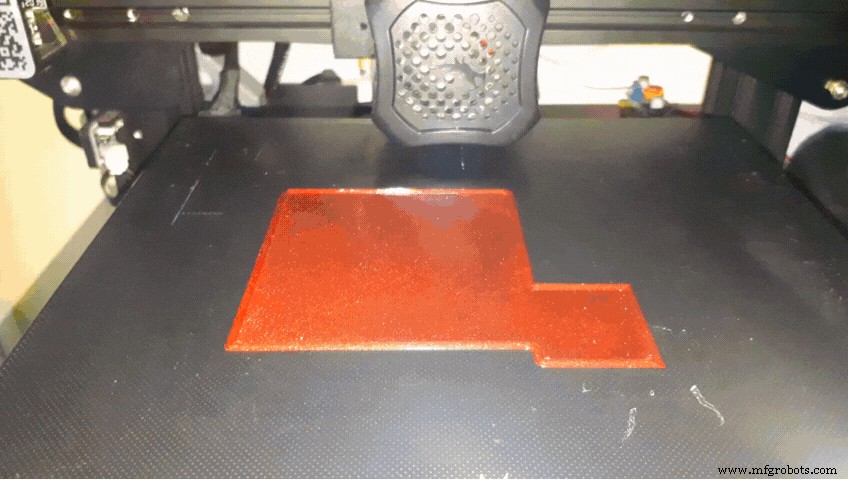
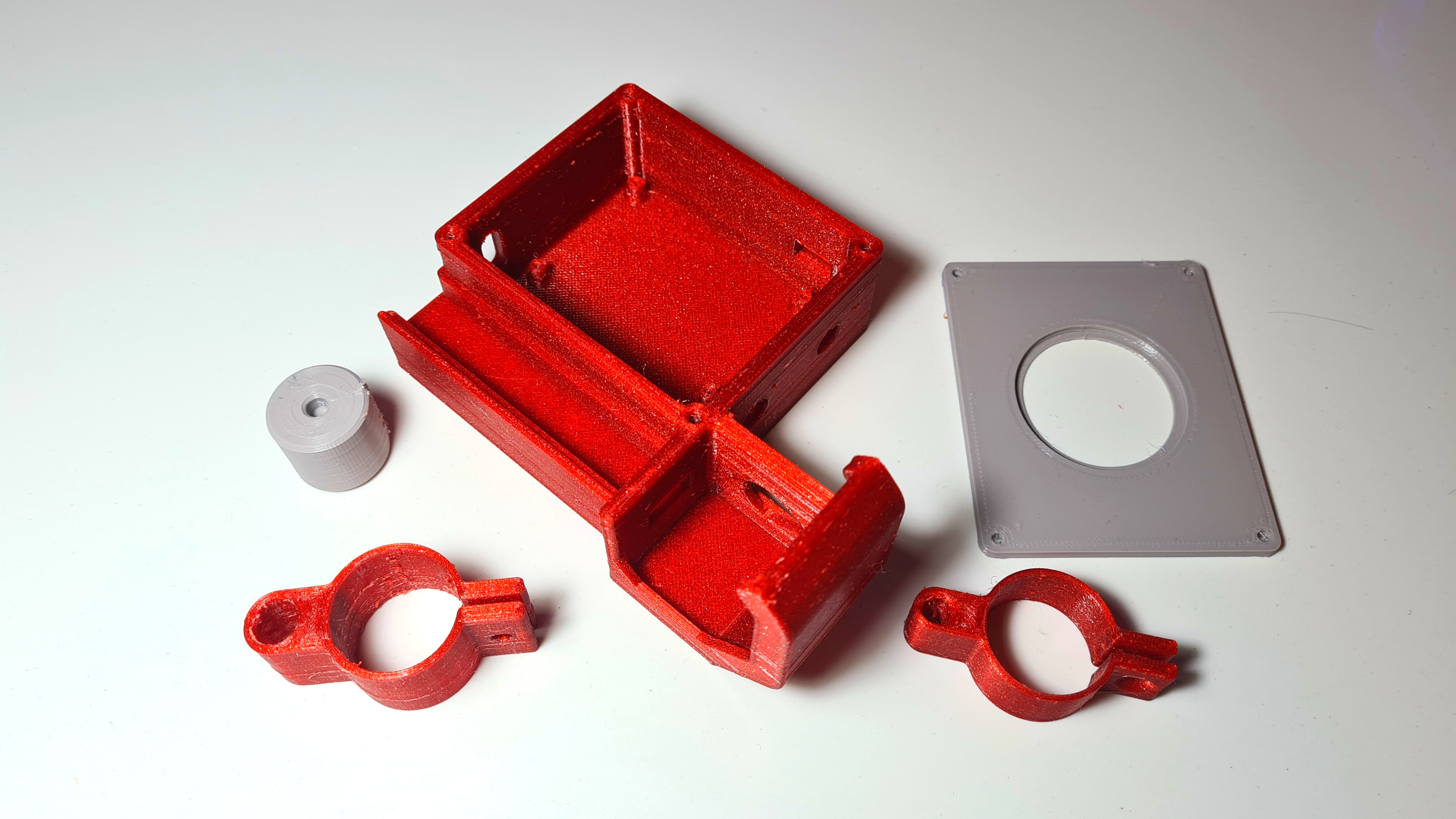
Desenhei todas as peças no Fusion 360, cortei-as em Cura e imprimi-as com meu Ender 3 V2 em PETG com camada de 0,2mm de altura. Você precisará imprimir:
- O " Base.stl "
- O " RotatorDispenser.stl "
- O " CoverBase.stl "
- O " LaserClamp.stl "
- E o " LdrClamp.stl "
Você pode encontrar todos os arquivos Aqui
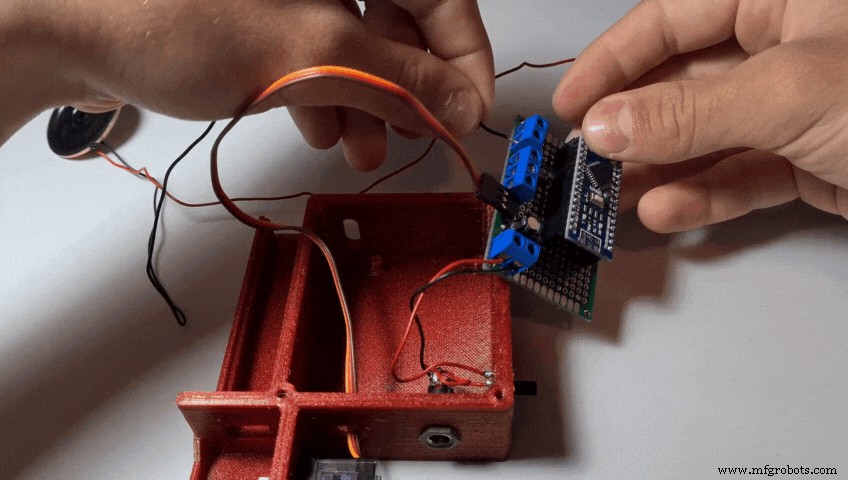
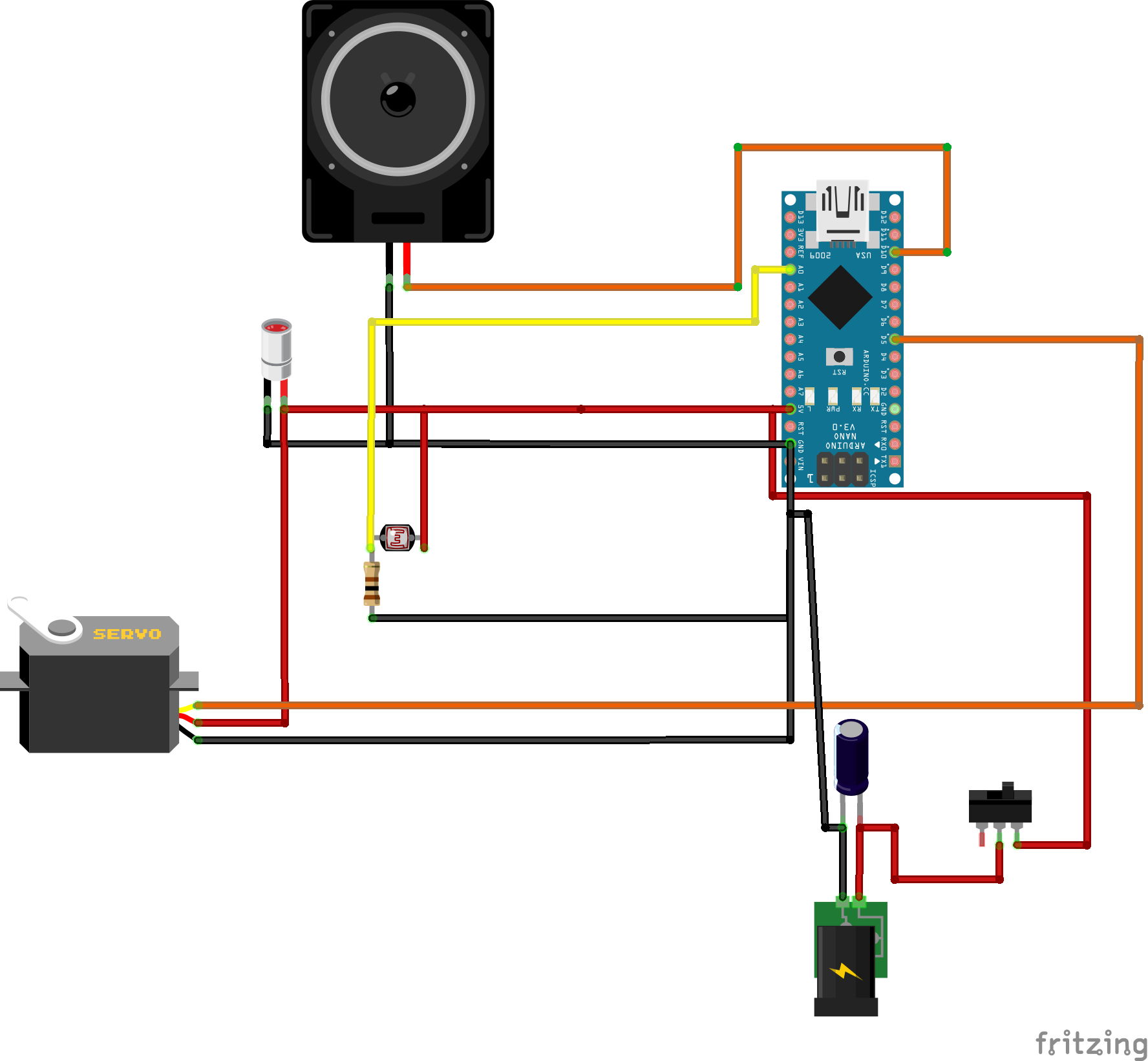
Etapa 3:Circuito Parte 1
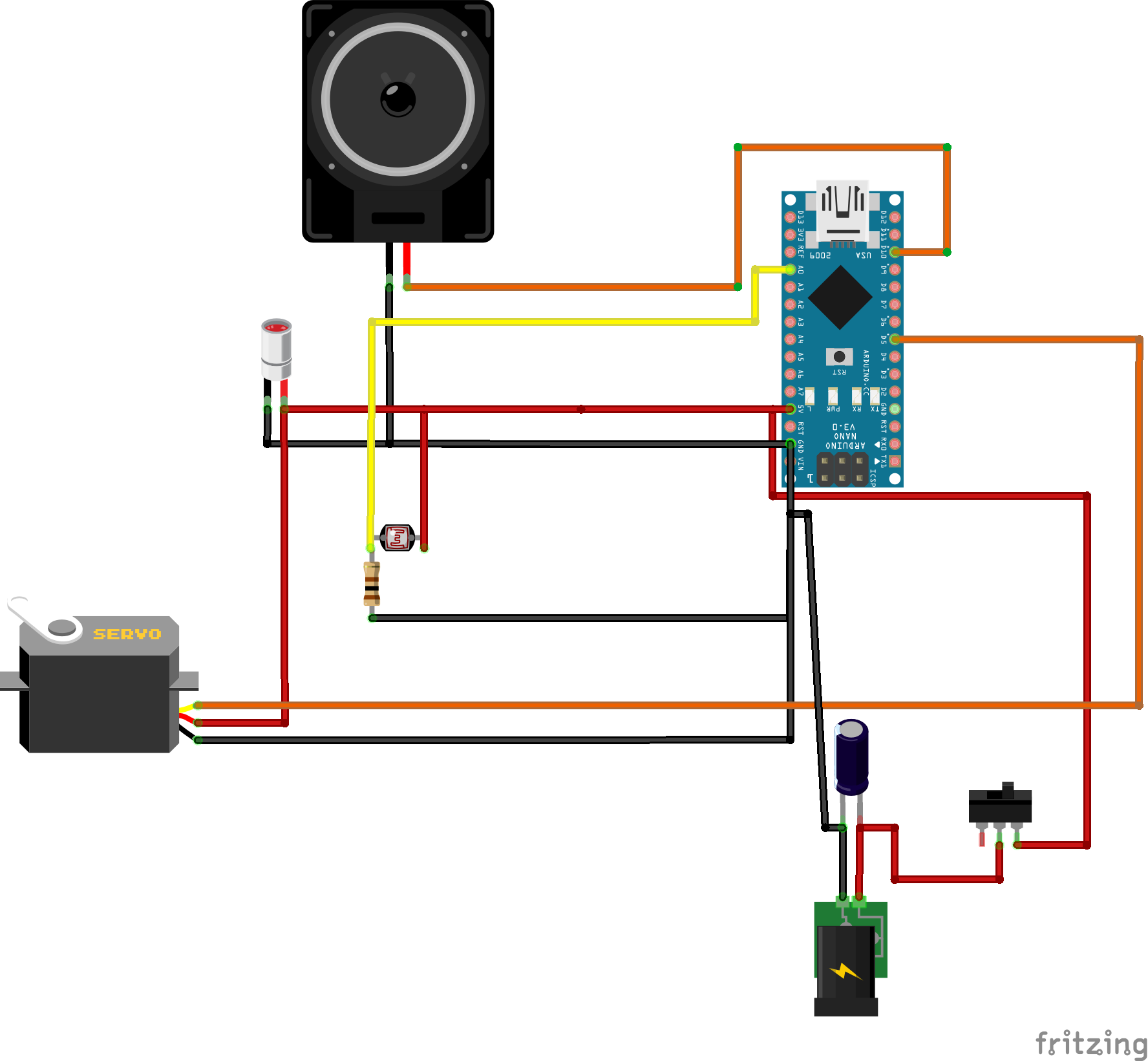
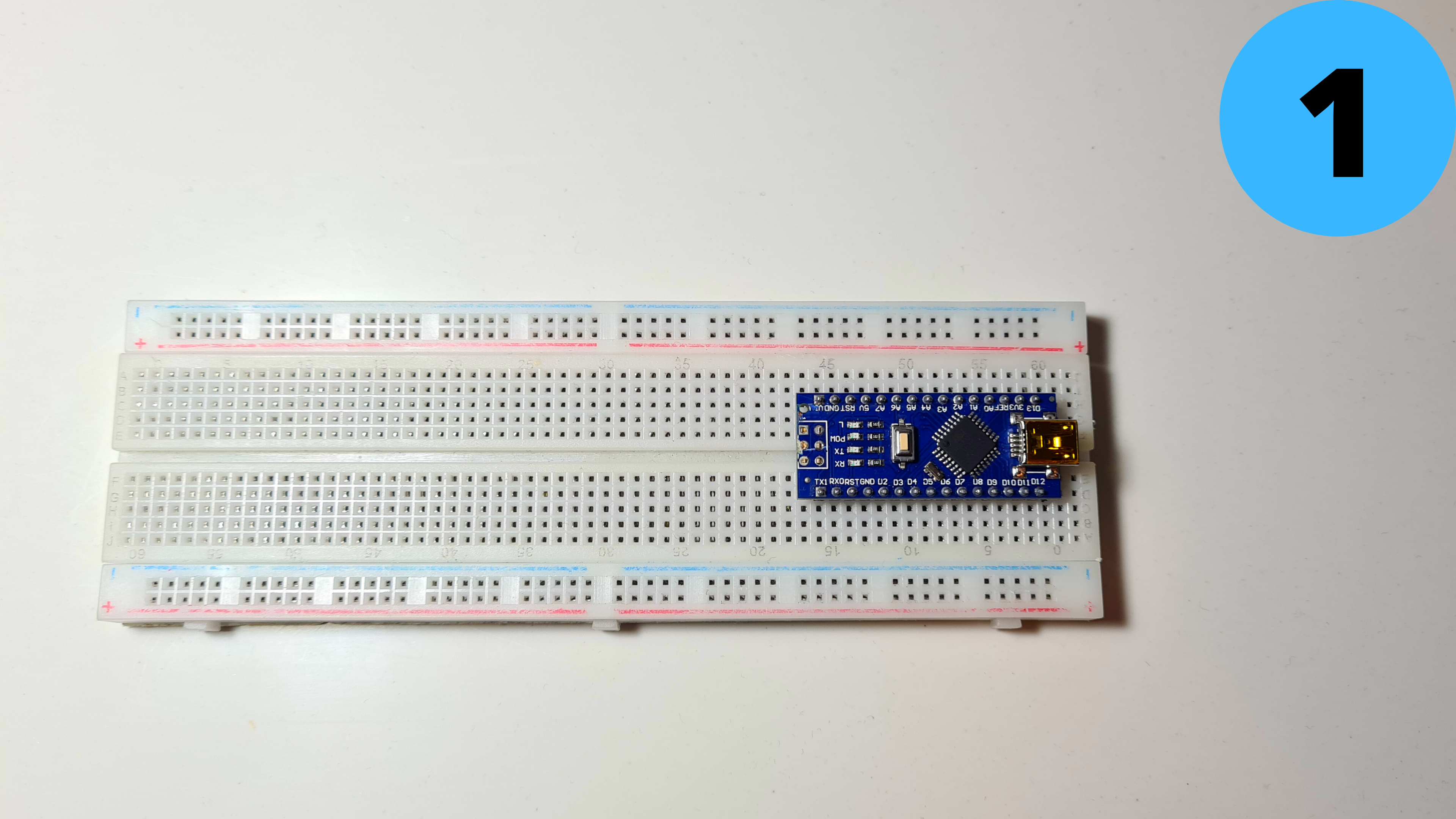
É hora de conectar a eletrônica !!
1. Coloque o Arduino Nano na placa de ensaio
2. Conecte 5V para Positive Rail (vermelho) e GND para Negative Rail (azul)
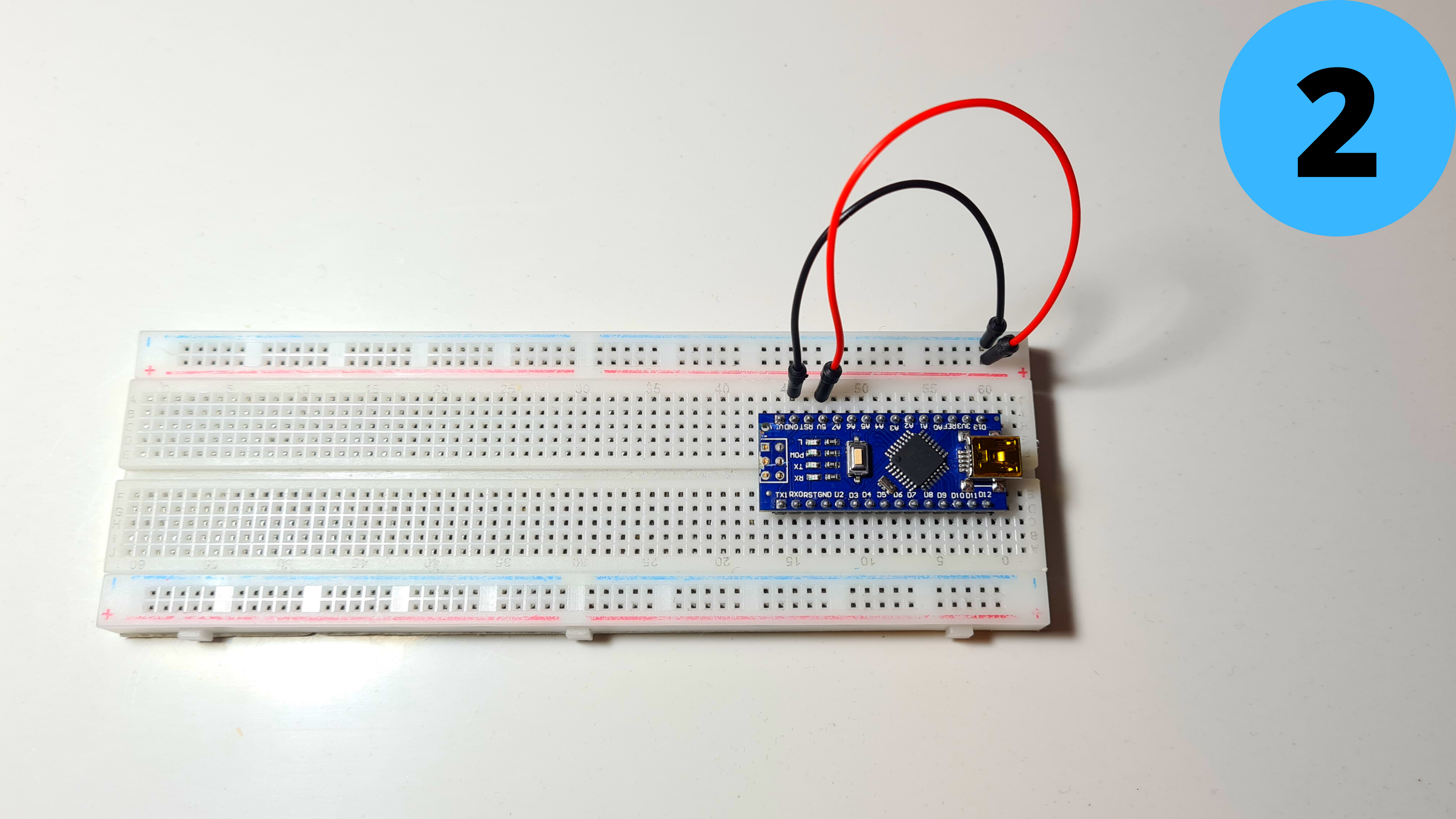
Etapa 4:Circuito Parte 2
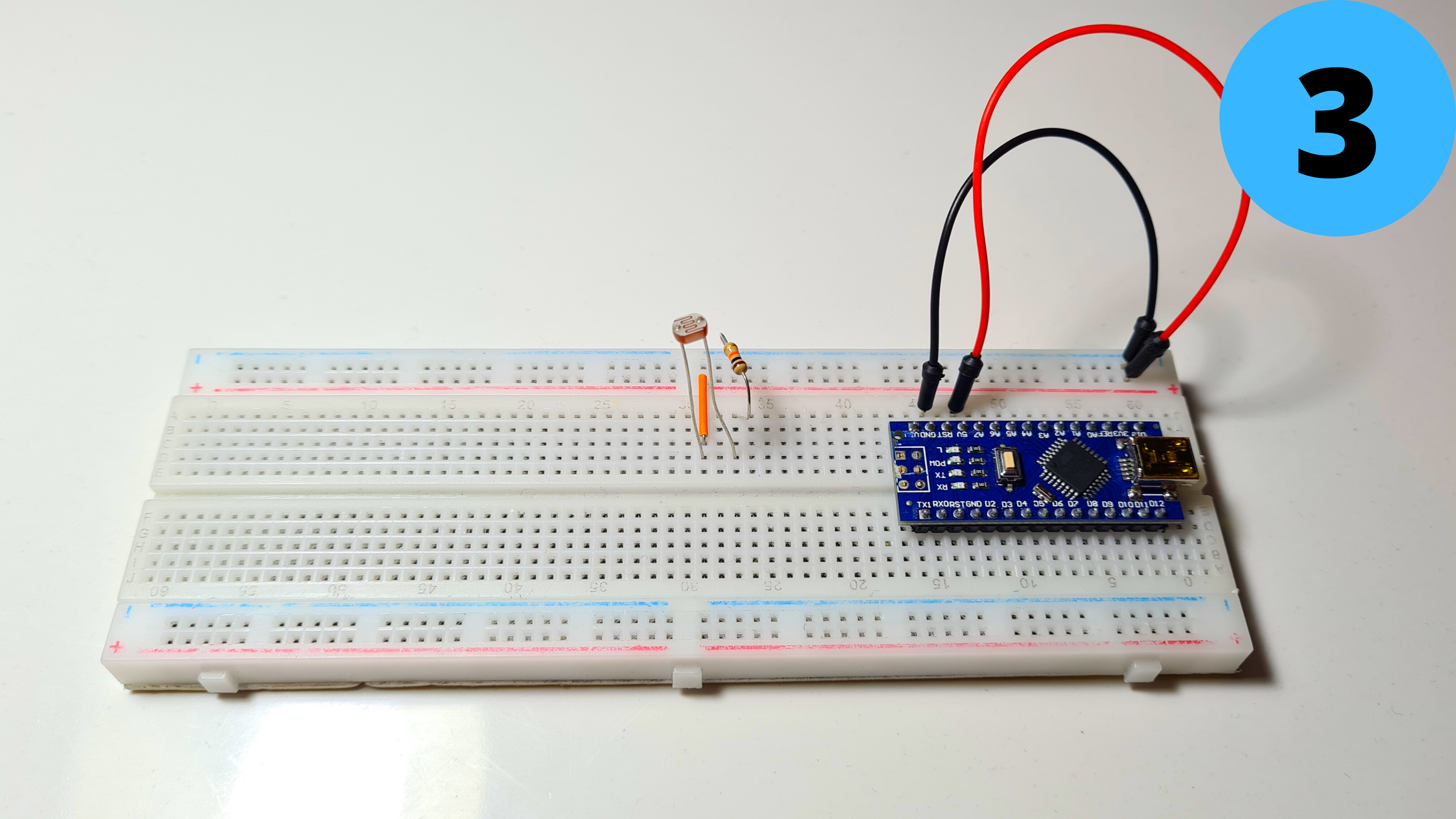
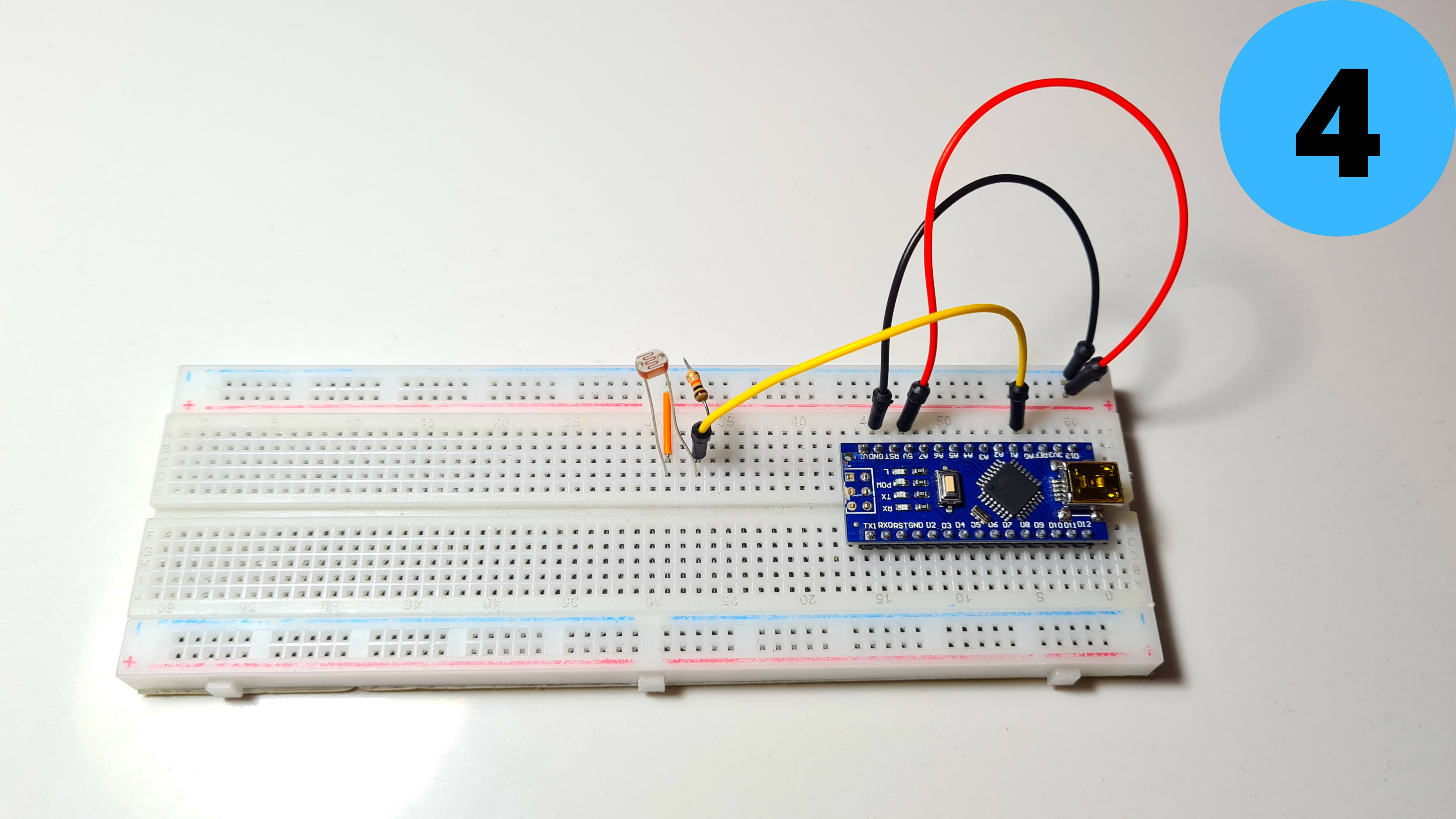
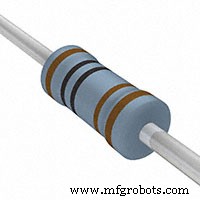
3. Adicione o LDR e conecte um de seus leads para 5V e o outro para GND com o resistor 1kΩ (a ordem não importa)
4. Conecte a segunda derivação a A0 também
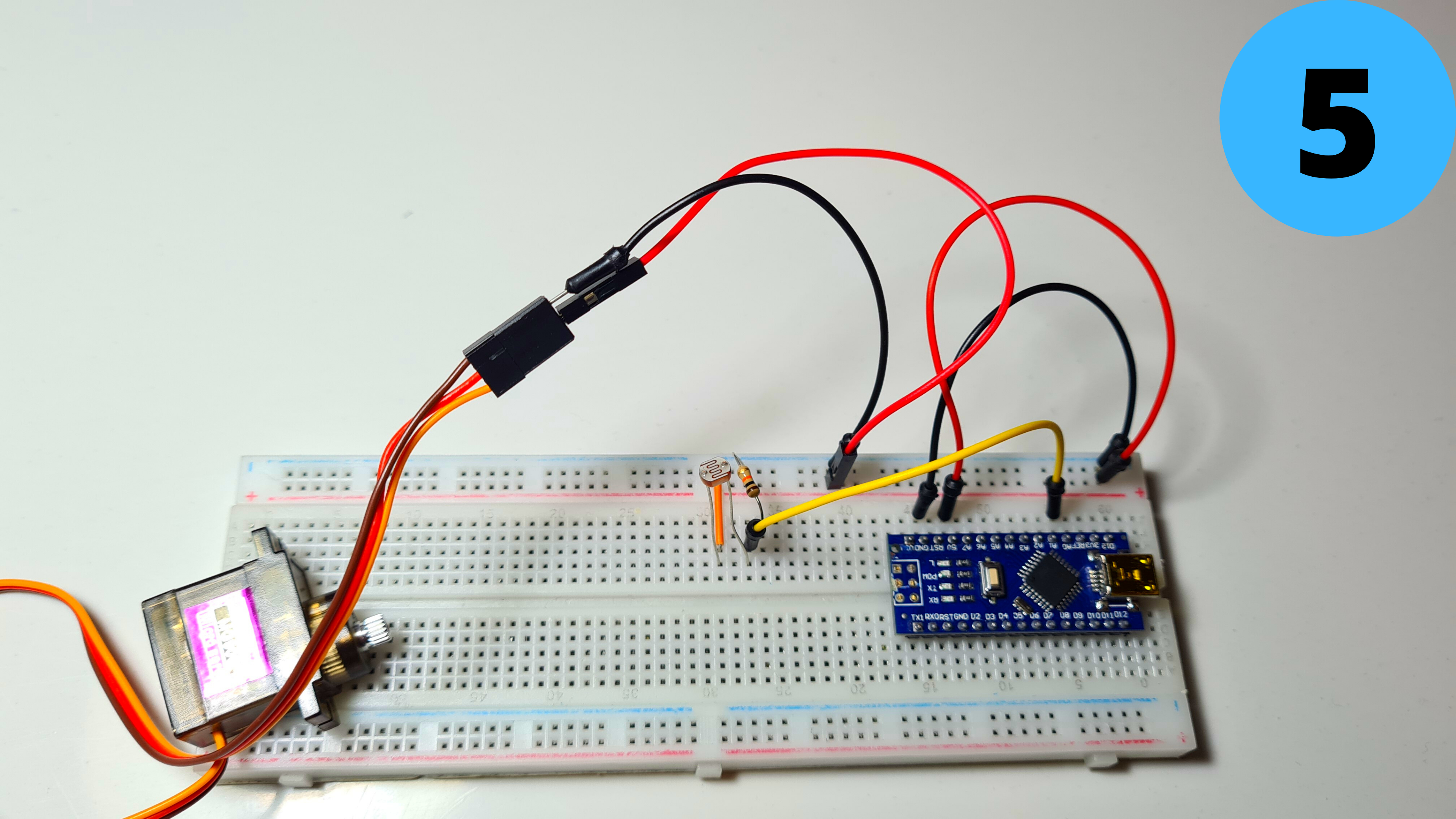
5. Adicione o MG90S Servo e conecte seu fio marrom ao GND e seu fio vermelho a 5V
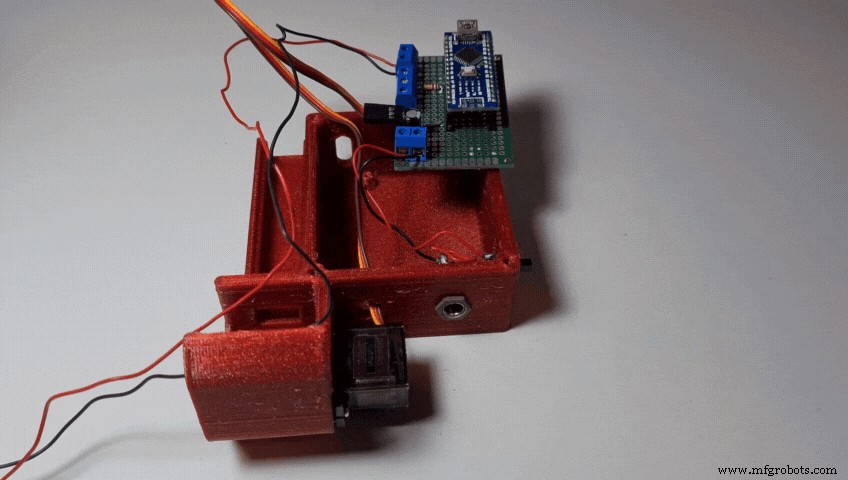
Etapa 5:Circuito Parte 3
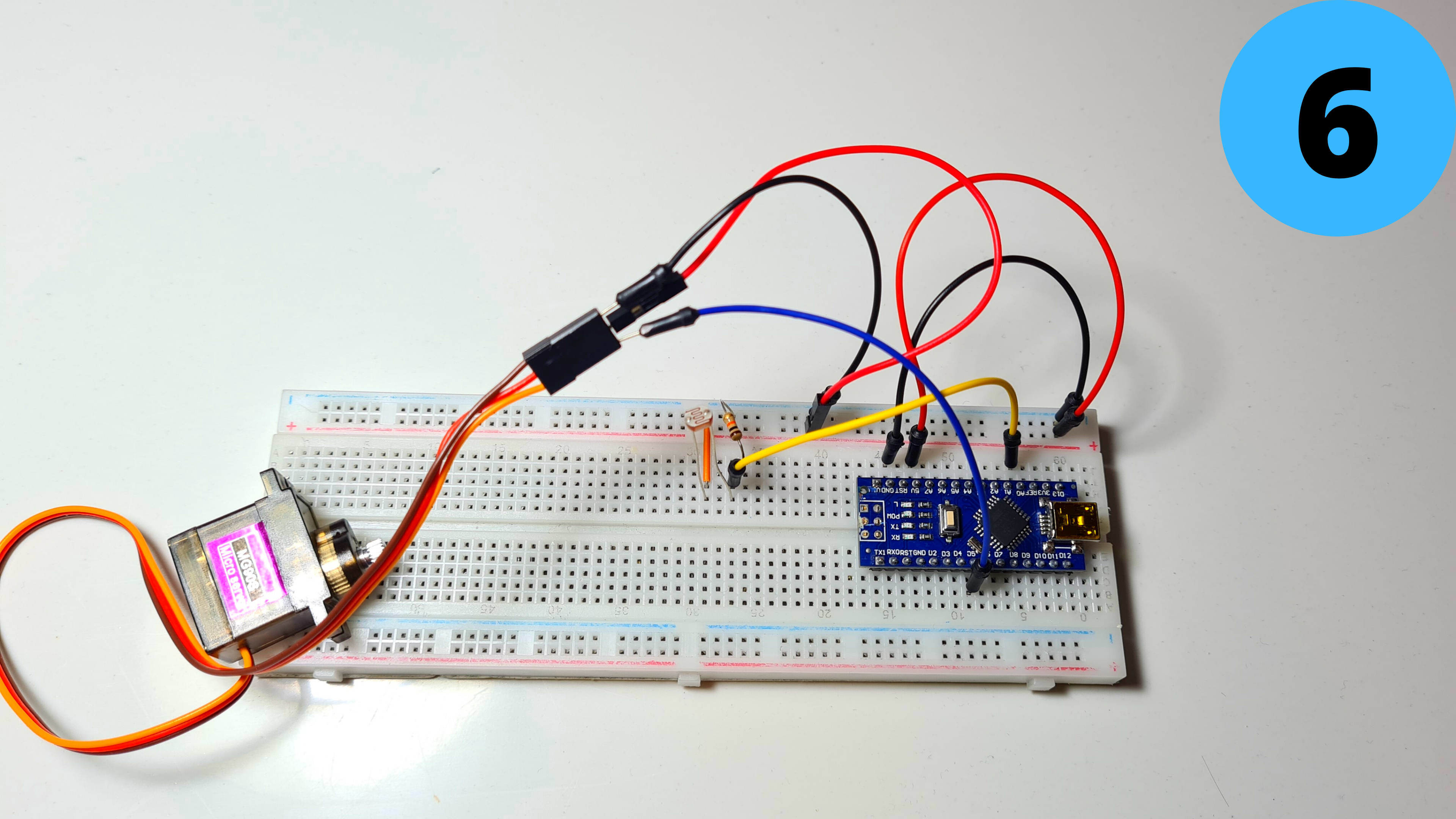
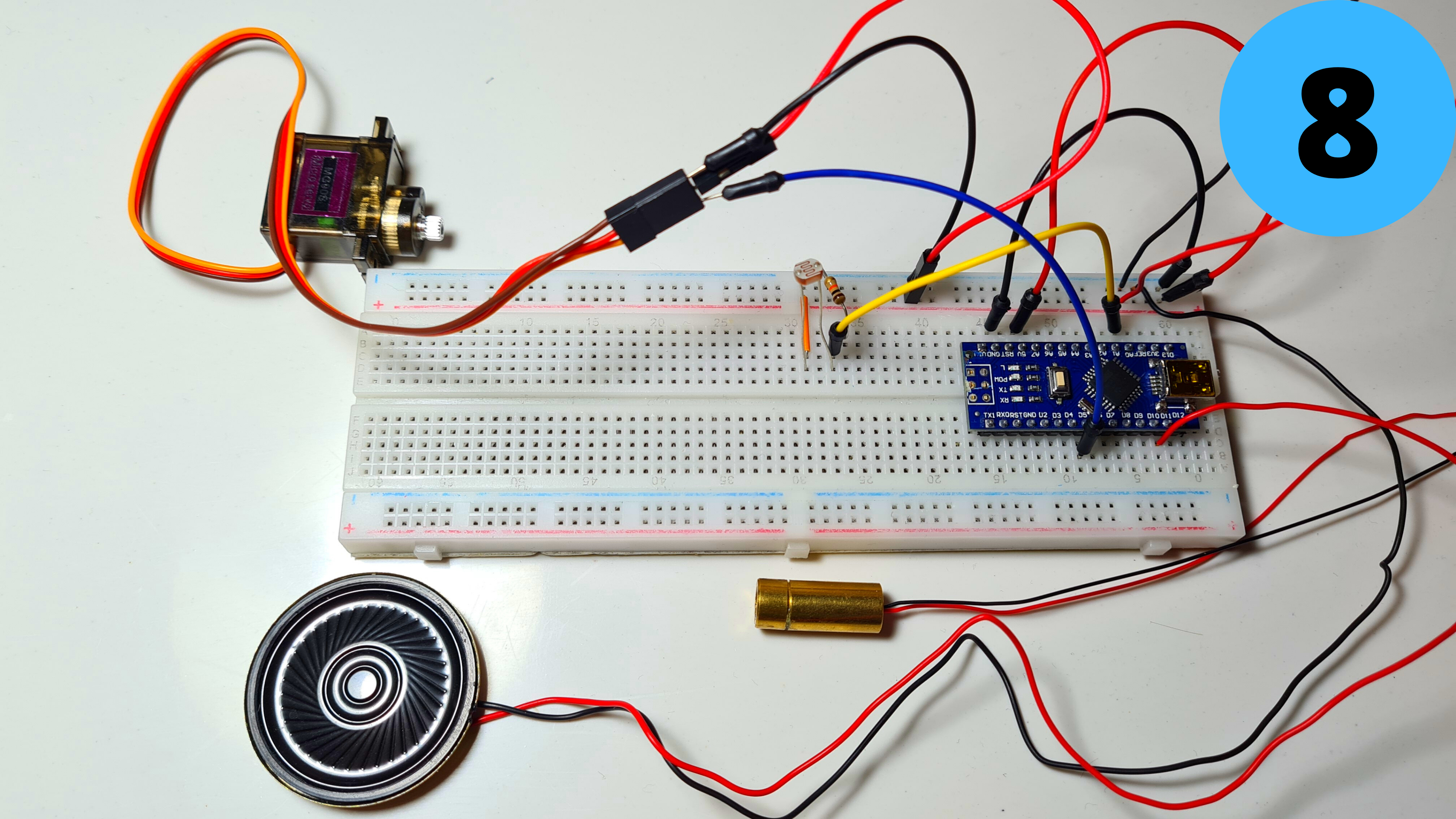
6. Conecte o YellowWire para D5
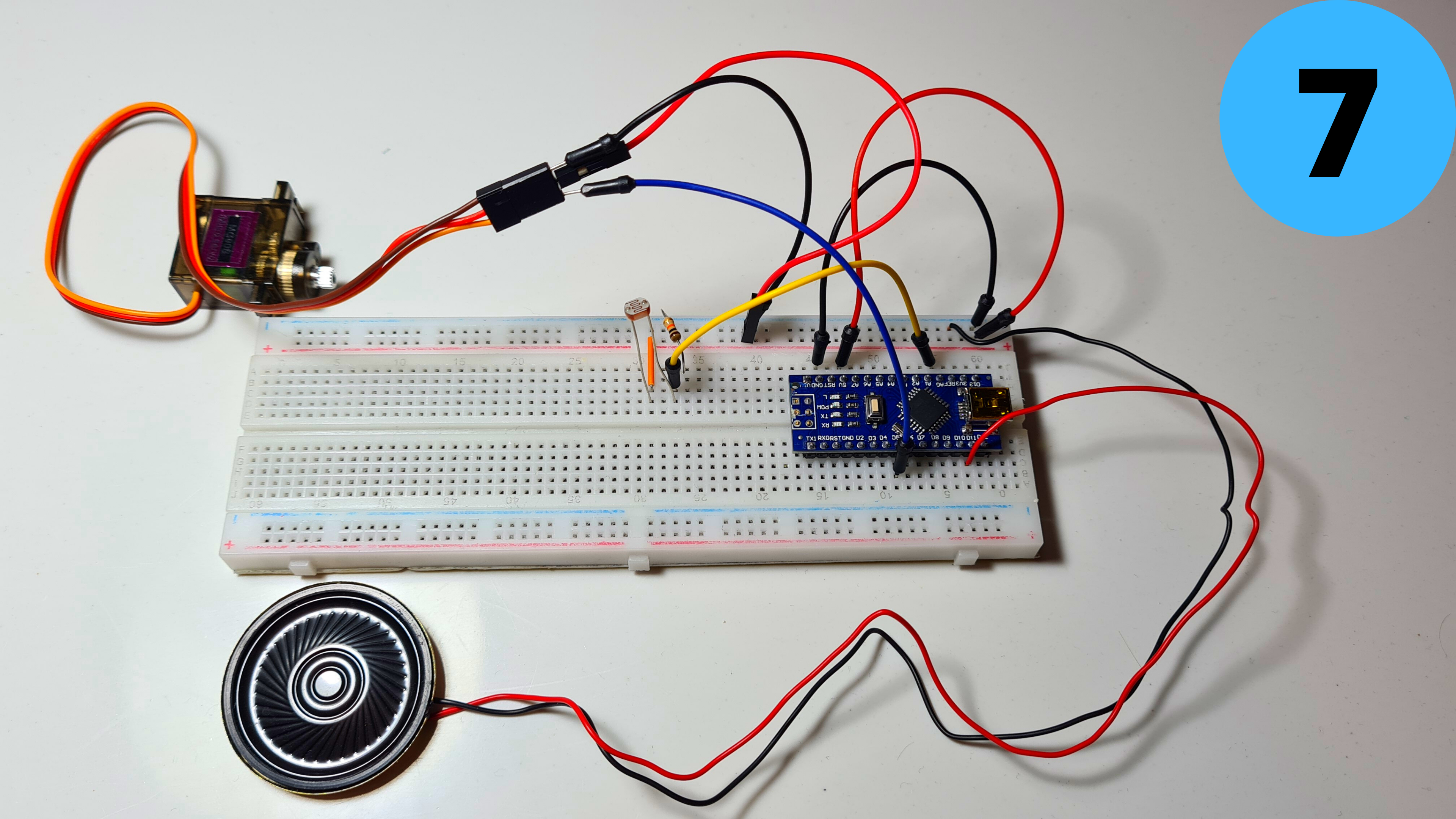
7. Adicione o pequeno alto-falante e conecte seu fio vermelho (+) para D11 e seu fio preto (-) para GND
8. Finalmente, adicione o Módulo Laser e conecte seu fio vermelho (+) a 5V e seu fio preto (-) para GND
Etapa 6:Programação
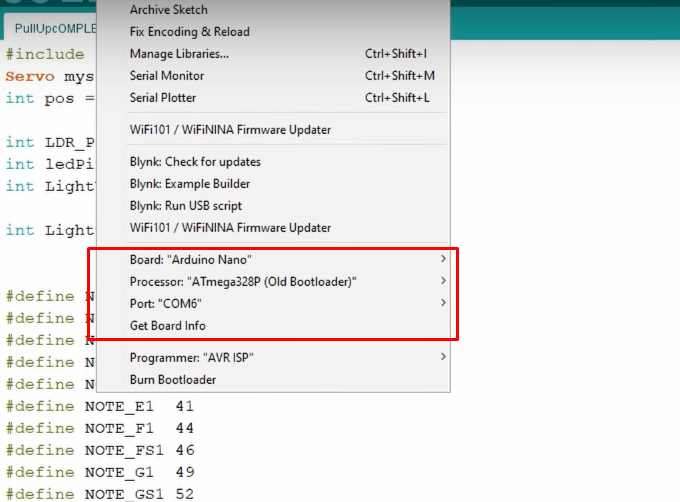
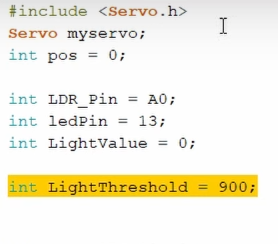
É hora de programar o Arduino Nano! Anexei meu código abaixo para você baixar, se quiser. Abra o Arduino IDE e selecione a Arduino Nano Board , sua porta COM , clique em Upload e pronto! O LightThreshold define o quão sensível é o LDR à luz, tenha isso em mente, pois eu irei me aprofundar nisso na próxima etapa.
Dê uma olhada no trabalho de adithyalokesh17 também! Ele transformou muitas músicas populares (como "Take on me", que eu usei) em código Arduino leve, que é fácil de usar com campainhas e alto-falantes sem a necessidade de leitores de cartão SD complicados, etc.
Etapa 7:Teste / Solução de problemas
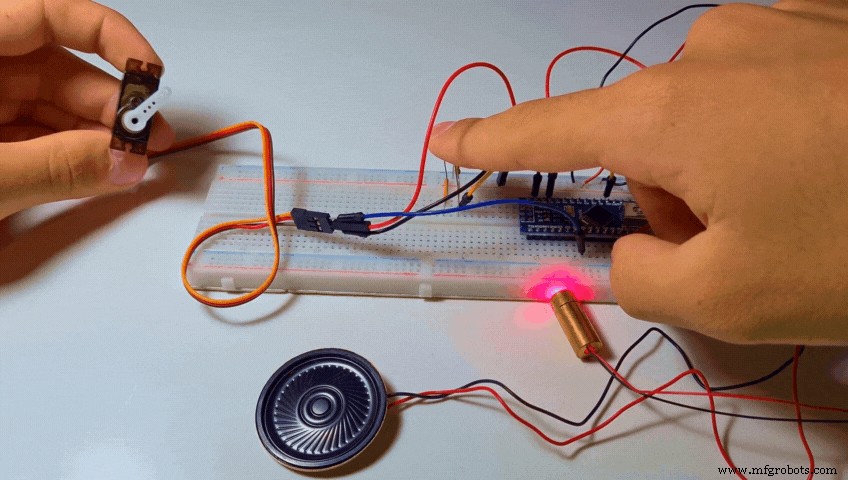
Quando o código é carregado, nada acontece. Em seguida, cubro o LDR com o dedo para bloquear a luz de alcançá-lo. Praticamente uma simulação do que acontecerá durante o treino, quando minhas mãos bloquearão o feixe de laser. Em ambos os casos, a instrução If é acionada, a música começa a tocar e, em seguida, o servo gira e dispensa um Tic Tac.
Existem dois problemas comuns que podem ocorrer aqui, mesmo que você tenha feito tudo corretamente.
- A música não começa a tocar quando você cobre o sensor. Você pode resolver isso facilmente aumentando o valor "LightThreshold" que falamos na etapa anterior, tornando-o mais sensível.
- A música começa a tocar sem nem mesmo cobrir o sensor. Você pode resolver isso diminuindo o valor "LightThreshold", tornando-o menos sensível.
Pontas:
- Uma boa dica para ajustar o valor do Limite da maneira certa seria usar o monitor serial e ver os valores de luz que o seu sensor produz. (O pode variar entre 0 (escuridão absoluta) a 1023 (luz absoluta)
- Para obter medições precisas, sugiro apontar o diodo laser para o LDR e trabalhar com esses valores em vez dos da luz ambiente de sua sala.
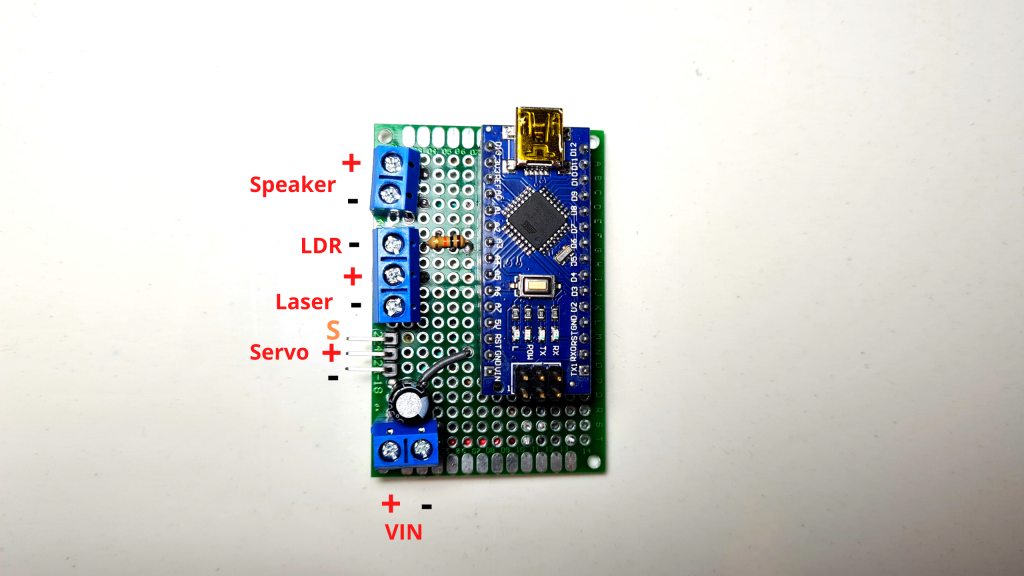
Etapa 8:PCB

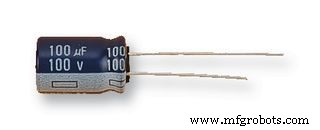
Como tudo funciona, é hora de fazer um pcb para encaixar todos os componentes em um gabinete mais compacto. A única diferença que o PCB tem do circuito da placa de ensaio que fizemos anteriormente é que incluí um terminal de entrada de energia que conecta (+) a 5V e (-) ao GND e adicionei um capacitor de 100μF (opcional) em paralelo para suavizar fora da corrente.
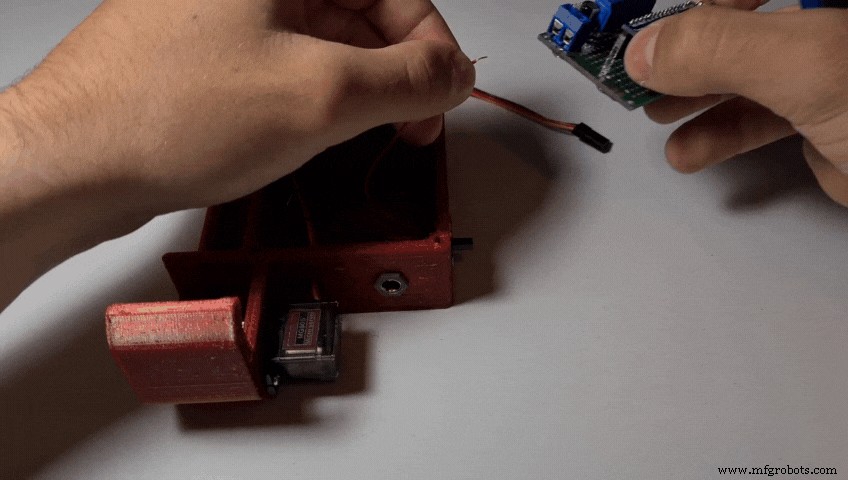
Etapa 9:Anexando o Servo
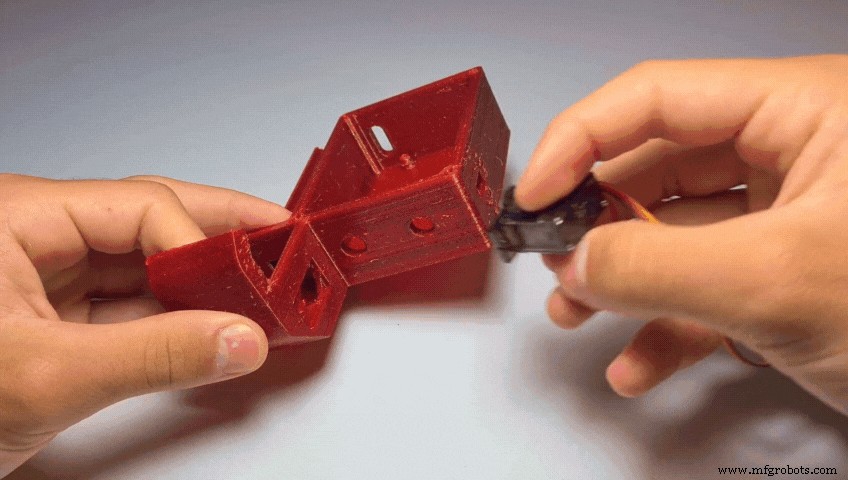
- Aparafuse o servo à base usando 1 ou 2 parafusos M2.
Etapa 10:empurrando o laser para a braçadeira
- Insira o diodo laser no LaserClamp.
Etapa 11:conectando o LDR ao grampo

- Insira o LDR no LdrClamp. (Existem dois pequenos orifícios para passar os fios)
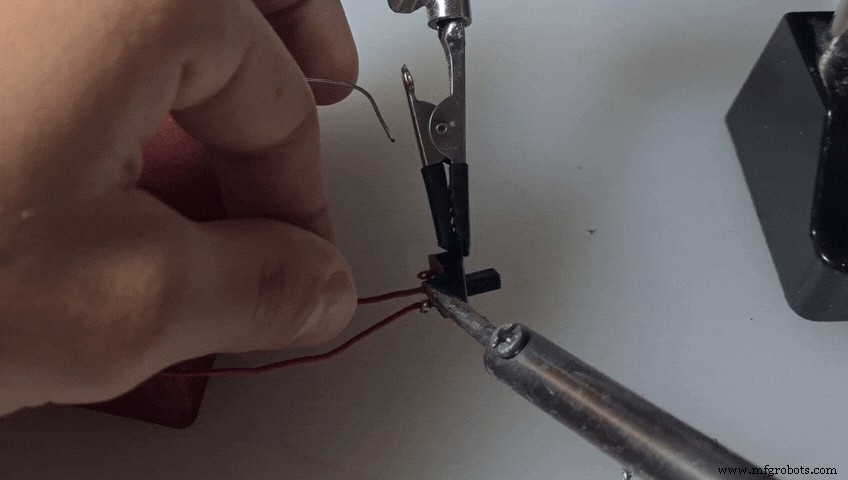
Etapa 12:Solda
- Solde um fio de preferência vermelho no terminal positivo do conector DC.
- Solde um fio preto no cabo negativo do DC Jack.
- Solde um novo fio vermelho na chave deslizante.
Etapa 13:conectando o conector DC
- Insira o conector DC em seu orifício na base. Prenda-o no lugar usando a porca.
Etapa 14:soldando o interruptor
- Solde o fio vermelho do conector DC ao outro cabo da chave.
Etapa 15:conectando o switch
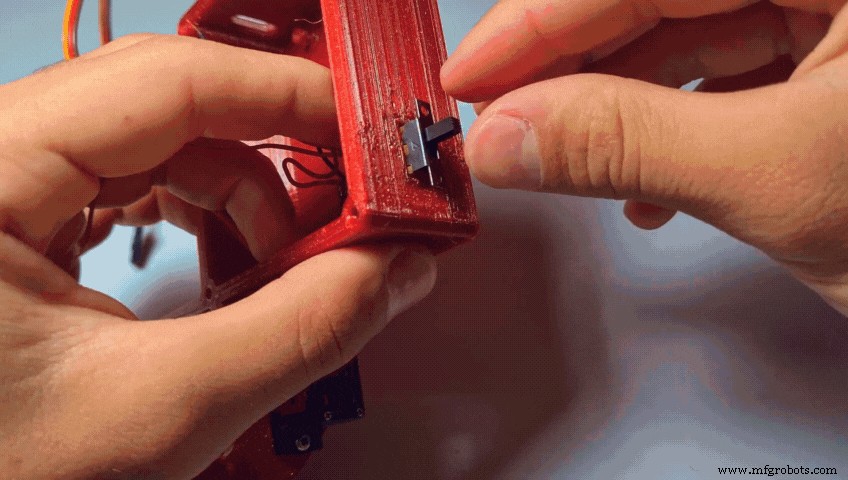
- Empurre o interruptor para o lugar.
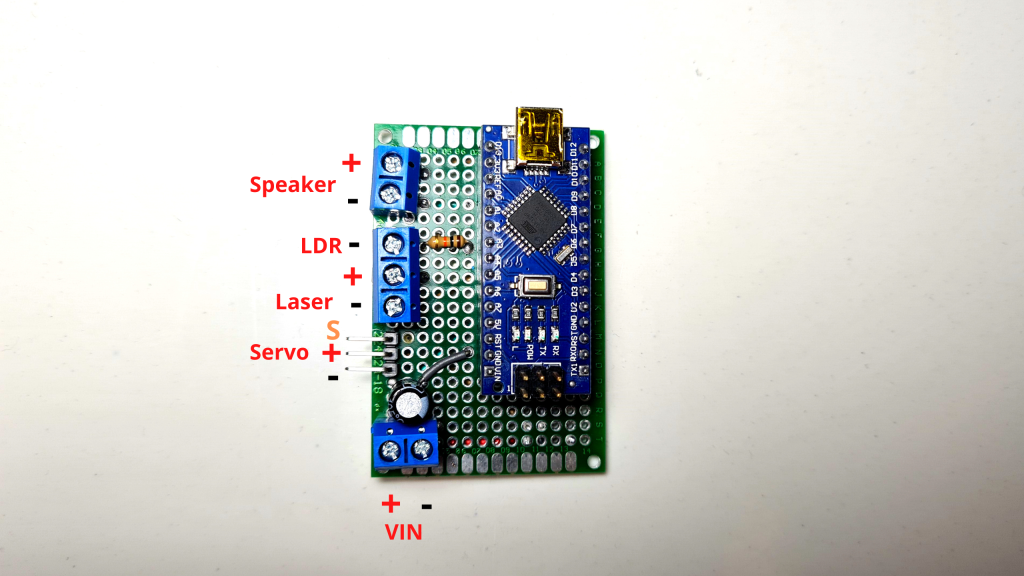
Etapa 16:Conectando a alimentação ao PCB

- Conecte o fio vermelho à entrada de alimentação positiva do pcb.
- E o fio preto para a entrada de alimentação negativa.
Etapa 17:Conectando o Servo ao PCB
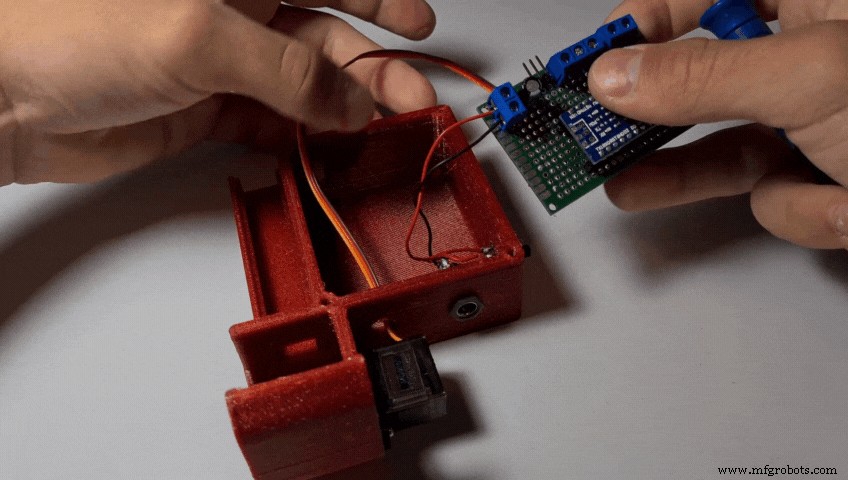
- Conecte o servo aos cabeçalhos masculinos.
Etapa 18:conectando o alto-falante ao PCB
- Conecte o alto-falante
Etapa 19:conectando o PCB à base
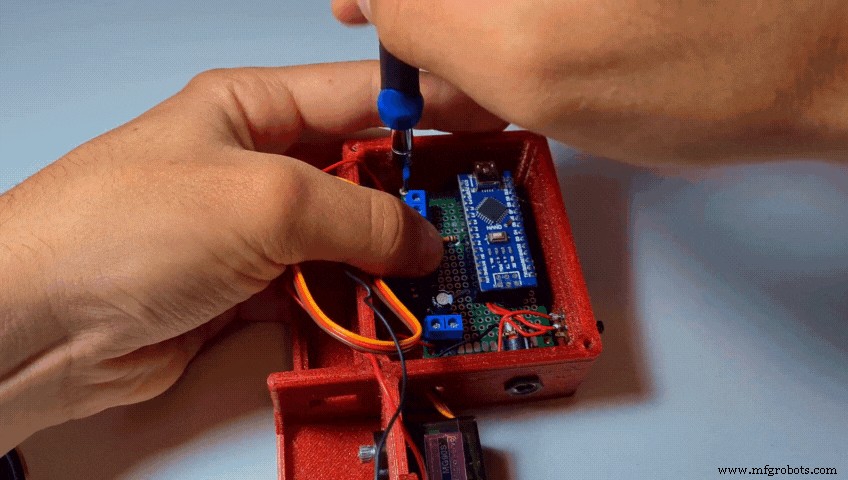
- Encaixe o PCB na base
- Prenda-o no lugar com 2 a 4 parafusos M2
Etapa 20:Corte e instalação da folha de plástico
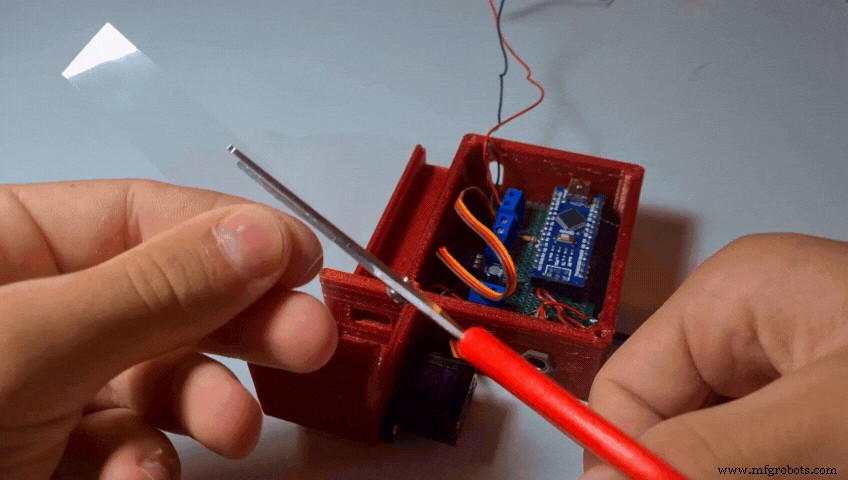
- Corte a folha de plástico transparente em um retângulo de cerca de 75 mm x 17 mm e apare suas laterais até que se encaixe bem na base.
Etapa 21:Instalando o laser na barra

- Prenda a pinça laser em um lado da barra pull-up e aperte a pinça usando um parafuso M4 e uma porca
Etapa 22:Instalando o LDR na barra

- Prenda o LdrClamp no outro lado da barra e aperte-o novamente usando um parafuso e porca M4
Etapa 23:Alinhando o laser e o LDR

- Ligue o Módulo Laser conectando-o a um ~ 5V fonte de alimentação (Arduino 5V pin, 3 pilhas AA, 1S Lipo, bateria 18650 ou o que você preferir)
- Gire as pinças até que o feixe de laser atinja o centro do LDR
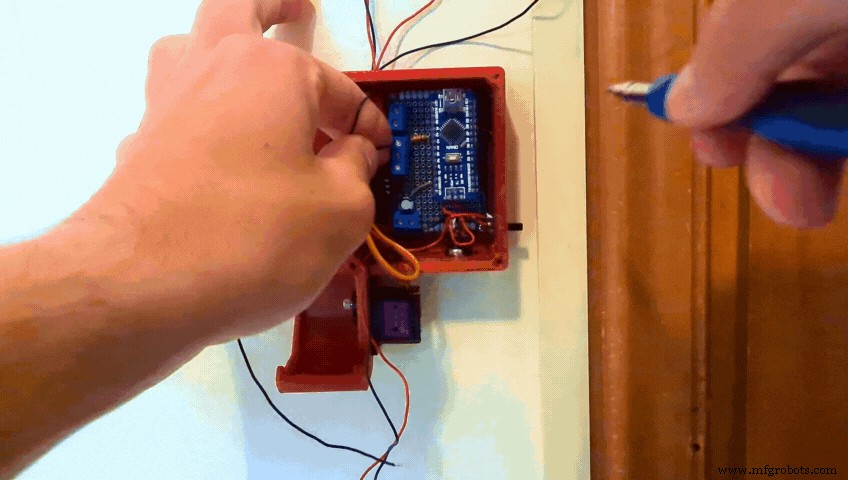
Etapa 24:colar o gabinete na parede

- Pegue a pistola de cola quente, possivelmente a ferramenta favorita de todos os fabricantes, e cole a base na parede.
Etapa 25:Conectando o laser e o LDR ao PCB
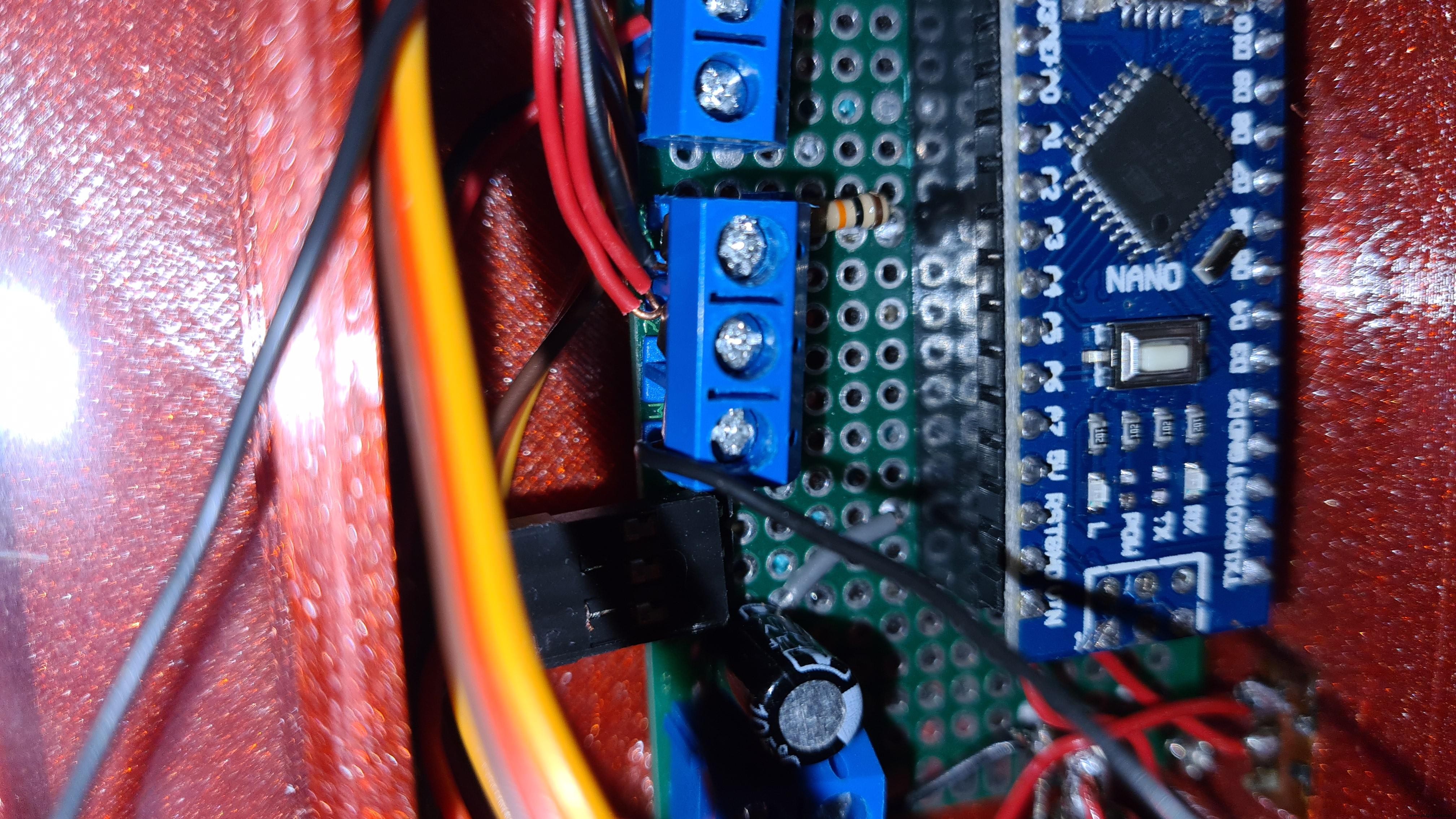
- Enrole os cabos do laser e do LDR em volta da sua porta
- Conecte os dois fios vermelhos à seção central do terminal de parafuso triplo
- Conecte o fio preto do LDR à seção superior
- E o fio preto do Laser para a outra seção
(Claro que todas essas conexões serão diferentes com base em como e se você faz o PCB e o meu pode ser usado apenas como uma referência de conceito)
Etapa 26:Instalação do dispensador
- Conecte a fonte de alimentação ao conector DC e ligue o interruptor
Quando o Arduino é ligado pela primeira vez, o servo vai automaticamente para sua posição de 0 grau e bloqueia no lugar. Quando isso acontecer, conecte o RotatorDispenser a ele. Certifique-se de que os dois orifícios para os Tic Tacs se alinhem corretamente .
Etapa 27:adicionar capa

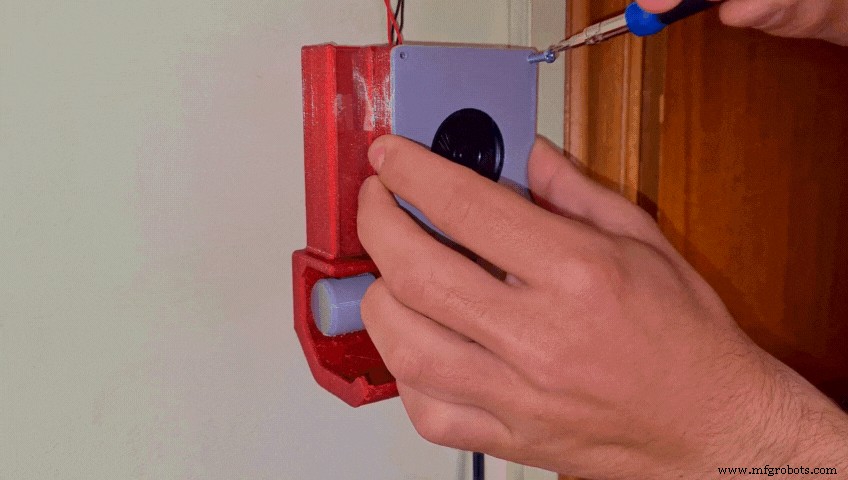
- Encaixe o alto-falante na capa
- Aparafuse a tampa à base usando 2 - 4 parafusos M3
Etapa 28:Adicionando Tic Tacs!

Por último, adicione alguns Tic Tacs ...
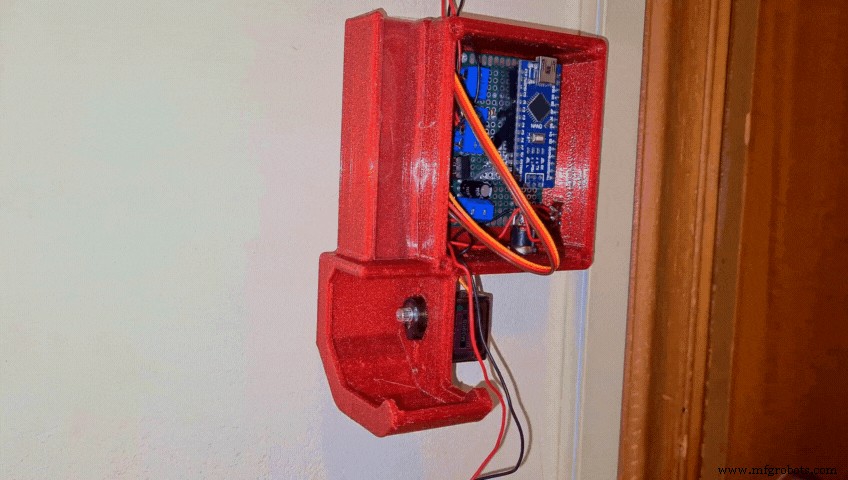
Etapa 29:Parabéns, o projeto agora está concluído!

E a barra de pull-up inteligente está finalmente concluída !!
Espero que tenham gostado deste tutorial tanto quanto eu gostei de fazê-lo! Se você tiver alguma dúvida ou sugestão, me avise! Considere também se inscrever em meu canal do YouTube para mais tutoriais, compilações legais e para me apoiar ao longo desta jornada. Tenha um ótimo dia!
Código
- SmartPullUpBar.ino
SmartPullUpBar.ino Arduino
Sem visualização (somente download).
Peças personalizadas e gabinetes
Thingiverse
https://www.thingiverse.com/thing:4809522Arquivo CAD em thingiverse.comEsquemas
Processo de manufatura
- Scanner de código de barras
- Bartender inteligente
- Semáforo inteligente
- Lixeira inteligente
- Elevando a ergonomia com atuadores elétricos inteligentes
- Liga 52 Barra
- O que é uma máquina de chanfragem de extremidade de barra?
- O que é um alimentador de barra longa?
- O que é um alimentador de barras pneumático?
- Recomendações de relação entre comprimento e diâmetro da barra de mandrilar para operadores de CNC