


Um robô Sudoku Solvers
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Aplicativos e serviços online
 |
| |||
 |
| |||
|
Sobre este projeto
Um robô que resolve e preenche sozinho uma grade de Sudoku!
Sudoku são quebra-cabeças digitais que os computadores podem resolver automaticamente porque obedecem a algumas regras matemáticas simples.


O objetivo principal deste projeto foi construir um robô rudimentar e autônomo, do tipo mesa de plotagem baseada na ideia de impressora 3D, que será capaz de:
- analise a grade de sudoku a ser preenchida
- resolva o problema do Sudoku
- preencha a grade
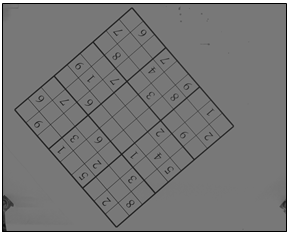
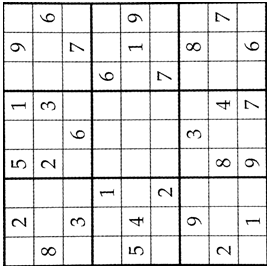
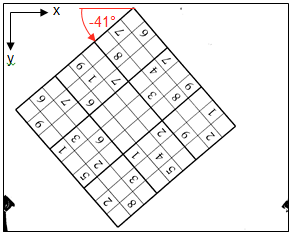
Isso significa que o robô deve ser capaz de processar a grade a ser resolvida para detectar as caixas já preenchidas, seus valores e então proceder ao preenchimento exatamente como a grade preenchida mostra abaixo.
Como funciona?
O hardware do robô consiste em usar um Raspberry Pi 3 com uma câmera. Uma foto da grade é tirada no início do processo.
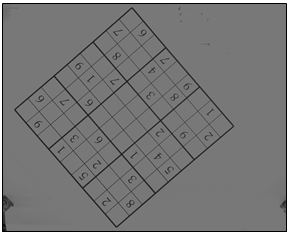
A grade é então pré-processada usando métodos de processamento de imagem para suprimir o artefato. É então corrigido para obter uma imagem focada apenas na grade.
Uma vez obtida a grade do Sudoku, segmentamos a grade para extrair cada caixa e procedemos ao reconhecimento da imagem usando uma rede neural. No final deste processo, temos uma representação numérica de nossa grade que pode então ser resolvida.
Uma vez resolvido, o raspberry pi é usado novamente para controlar os motores do robô a fim de preencher a grade.
Resumindo,

- 1 - corrigir a grade
- 2 - estimar os contornos da grade
- 3 - aumente o contorno (multiplicando 1 por 2)
- 4 - segmente a grade para extrair as caixas
- 5 - prossiga para o reconhecimento de imagem
O resultado
Habilidades necessárias
- visão computacional
- Processamento de imagens
- Habilidades de programação
- Eletrônico
- Mecânica
Ferramentas úteis e API
- Python
- tensorflow para rede neural
- opencv para processamento de imagem
Referências
- https://en.wikipedia.org/wiki/Sudoku
- https://github.com/Sanahm/TensorFlow-Tutorials
Para mais informações sobre o projeto, não hesite em me contatar no Github.
Código
Github
https://github.com/Sanahm/Sudoku-robothttps://github.com/Sanahm/Sudoku-robotProcesso de manufatura
- Controle remoto universal Raspberry Pi
- Uma fatia de Raspberry Pi
- Cycle Chaser
- Detector de ladrão Raspberry Pi
- Sensor de temperatura Raspberry Pi
- RASPBERRY PI HOME AUTOMATION
- Robô usando Raspberry Pi e Bridge Shield
- Robô evitando parede baseado em Raspberry Pi - FabLab NerveCentre
- Construindo o Kit do Robô MonkMakes Raspberry Pi
- XMOS startKIT:Construindo um XMOS e Raspberry Pi Robot XMP-1