


Robô Industrial
Antecedentes
Os robôs industriais são dispositivos mecânicos que, até certo ponto, reproduzem os movimentos humanos. Eles são usados sempre que houver necessidade de reduzir o perigo para um humano, fornecer mais força ou precisão do que um humano ou quando a operação contínua for necessária. A maioria dos robôs é estacionária, mas alguns se movem pelo local de trabalho entregando materiais e suprimentos.
Muitas pessoas pensam nos robôs como os monstros do tipo humanóide que são vistos em filmes de ficção científica e fantasia. Embora possamos algum dia ter a capacidade técnica para produzir tal máquina, os robôs de hoje são, na verdade, dispositivos bastante simples. Os movimentos que consideramos corriqueiros - pegar uma moeda da mesa, por exemplo - são consideravelmente mais difíceis para um robô. Nosso cérebro processa milhares de bits variáveis de dados de nossos olhos para instruir nosso braço, pulso, mão e dedos a alcançar, agarrar e pegar a moeda. Até mesmo a sensação tátil da moeda atualiza constantemente nosso cérebro para fornecer pressão com o dedo apenas o suficiente para segurar a moeda com segurança. Quaisquer variações de posição são compensadas sem esforço em nosso cérebro. Para programar de forma fácil e econômica um robô industrial para realizar a mesma tarefa, muitas dessas variáveis devem ser restringidas ou eliminadas. Posição, alcance, peso e preensão devem permanecer o mais consistentes possíveis para que as variações não resultem na perda ou queda do objeto. O computador que controla o robô deve ser programado por um técnico, para "ensinar" a máquina a completar o movimento. As áreas em que os robôs têm melhor desempenho do que os humanos são em precisão e repetibilidade. Embora algumas pessoas possam pegar a moeda com movimentos semelhantes a cada vez, o robô pode realizar a operação exatamente com os mesmos movimentos sem se cansar. Muitos robôs podem repetir movimentos com uma precisão de alguns milésimos de polegada e operar 24 horas por dia. Por causa desse trabalho incansável e preciso, os robôs são um segmento crescente de compras de equipamentos industriais. A maioria é usada para operações repetitivas de pintura e soldagem, enquanto outros, conhecidos como robôs pick-and-place, são usados para levantar e colocar produtos em máquinas e embalagens.
História
Robôs, ou "robótica", são um segmento da ciência mais ampla da automação. A automação usa máquinas e computadores que podem aprender ou compensar as condições variáveis de operação. O termo robô pode ser atribuído à palavra tcheca robota, o que significa trabalho compulsório. O termo apareceu pela primeira vez em 1921 na peça "R.U.R." (Robôs Universais de Rossum) do dramaturgo tcheco Karel Capek. A peça descreveu robôs humanóides que destruíram seus criadores humanos - quase o mesmo enredo de alguns thrillers de ficção científica modernos.
Os robôs práticos foram tentados pela primeira vez após o desenvolvimento do computador. No final dos anos 1960, o Stanford Research Institute projetou e construiu um robô experimental chamado "SHAKEY". Usando uma câmera de televisão e um computador, essa máquina foi capaz de mover e organizar blocos em pilhas. A General Motors financiou um programa no Instituto de Tecnologia de Massachusetts em meados da década de 1970 para desenvolver um robô automatizado para fins de montagem. Aqui, o pesquisador Victor Scheinman inventou o PUMA (manipulador universal programável para montagem), e começou a entrada dos robôs na indústria americana.
Matérias-primas
Os robôs são construídos principalmente de materiais comuns. Alguns robôs especializados para aplicações de salas limpas, o programa espacial ou outros projetos de "alta tecnologia" podem usar titânio metálico e compostos estruturais de fibras de carbono. O ambiente operacional e a resistência necessária são os principais fatores na seleção do material.
Aço, ferro fundido , e o alumínio são usados com mais frequência para os braços e bases dos robôs. Se o robô for móvel, eles geralmente os equipam com pneus de borracha para uma operação silenciosa e uma aderência positiva ao solo. Os robôs contêm uma quantidade significativa de componentes eletrônicos e fiação, e alguns são controlados por rádio ou laser. Os cilindros e outros mecanismos geradores de movimento contêm óleo hidráulico ou ar pressurizado. Mangueiras de silicone, borracha e aço inoxidável trançado conectam esses mecanismos às suas válvulas de controle. Para proteger o robô do meio ambiente, algumas áreas expostas são cobertas com escudos de neoprene flexíveis e foles desmontáveis. Motores elétricos e drives lineares são adquiridos de fornecedores de automação junto com o controlador, ou "cérebro". Os controladores são alojados em gabinetes elétricos de aço localizados próximos à área de trabalho do robô ou carregados a bordo do próprio robô.
O processo de fabricação
Design
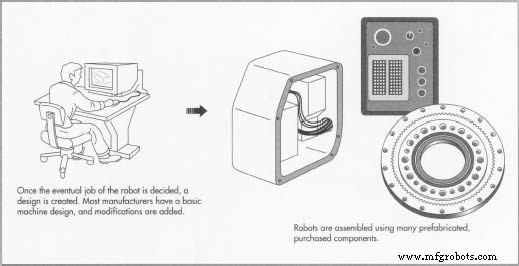
- 1 Todo robô começa com a fase de design. Esses e outros fatores devem ser levados em consideração no projeto:trabalho a ser executado; velocidade de operação; ambiente de operação; materiais perigosos envolvidos; comprimento de alcance; caminho de viagem; variáveis de processo; envolvimento humano; capacidade do controlador; e resultado de falhas.
A maioria dos fabricantes tem um projeto básico de máquina ao qual incorporam modificações e acessórios para atender aos requisitos específicos da aplicação.
 O primeiro robô instalado na indústria americana, este Unimate "escolhe e posiciona" primeiro removeu peças de metal quente de uma máquina de fundição sob pressão em uma fábrica da GM em Trenton, New Jersey, em 1961. (Das coleções do Museu Henry Ford e Greenfield Village.)
O primeiro robô instalado na indústria americana, este Unimate "escolhe e posiciona" primeiro removeu peças de metal quente de uma máquina de fundição sob pressão em uma fábrica da GM em Trenton, New Jersey, em 1961. (Das coleções do Museu Henry Ford e Greenfield Village.) Os robôs, como qualquer ferramenta, são tão bons quanto as pessoas que os manejam. Eles não podem realizar tarefas para as quais não foram projetados ou programados. Eles são mais eficazes quando o sistema geral e os processos são cuidadosamente planejados. Além disso, os trabalhadores responsáveis por eles também devem ser totalmente educados e treinados.
Na década de 1980, a General Motors Corporation gastou mais de US $ 40 bilhões em novas tecnologias, muitas centenas de milhões em robôs. Infelizmente, a empresa não gastou o suficiente para entender os sistemas e processos que os robôs deveriam revolucionar ou nas pessoas que deveriam mantê-los e operá-los. A fábrica da GM em Hamtramck, Michigan, deveria ser uma vitrine para a empresa. Em vez disso, em 1988, era o local de algumas das piores utopias tecnológicas. Os robôs na linha às vezes pintavam uns aos outros em vez da carroceria que passava; robôs ocasionalmente saíam do controle e colidiam com os veículos que passavam; um robô projetado para instalar pára-brisas foi encontrado destruindo-os sistematicamente. Certa vez, quando um robô parava de funcionar, os técnicos não sabiam como consertá-lo. Uma chamada apressada para o fabricante trouxe um técnico no próximo avião. Ele olhou para o robô, apertou o botão "Reiniciar" e a máquina voltou a funcionar.
William S. Pretzer
Fabricação
- 2 Uma vez projetados, a base, os braços, a coluna e os suportes são fabricados. A base é
 geralmente pesado, para evitar que o robô tombe. É feito por fundição ou por soldagem e, em seguida, usinado. Muitos fabricantes de robôs usam robôs para soldar peças para novas.
geralmente pesado, para evitar que o robô tombe. É feito por fundição ou por soldagem e, em seguida, usinado. Muitos fabricantes de robôs usam robôs para soldar peças para novas.
Essas áreas que se unem ao resto do robô são usinadas com controle dimensional próximo para garantir o encaixe e a operação adequados dos componentes de fixação. Da mesma forma, a coluna principal e os braços são construídos para se encaixar com precisão na montagem final.
Montagem
Os robôs são montados usando uma quantidade substancial de componentes adquiridos, como motores elétricos, cilindros hidráulicos, rolamentos, fiação, controladores e outras peças importantes. Um robô industrial pode conter 2.000 peças individuais e é montado por equipes. Essas equipes começam com a base e montam os componentes no robô até que esteja completo e pronto para teste e acabamento.
Para iniciar o processo de montagem, os robôs móveis primeiro têm os motores de tração, baterias, eixos, rodas e pneus montados. Robôs estacionários não requerem esses itens. Eles são temporariamente aparafusados ao chão para estabilidade durante a montagem. As colunas e braços móveis são submontados com seus respectivos motores de acionamento e, em seguida, fixados na base. A base contém uma engrenagem de anel que é acionada por motor para fornecer o movimento de rotação. Deve coincidir com a engrenagem motriz contida na coluna. Os rolamentos axiais suportam o peso da coluna e dos braços na base. Uma escala magnética circunda o rolamento e fornece feedback de posição eletrônico para o controlador.
Link
- 3 A próxima junta é o elo. Ele atua como um cotovelo e conecta o braço à base. Um suporte de estabilizador fornece controle posicional para o link, permitindo que ele se mova em um caminho predeterminado. Esses componentes contêm suportes de rolamento nos quais os eixos de articulação são aparafusados. Cada rolamento é pré-lubrificado ou fornecido com uma linha ou conexão de lubrificação. O link contém um sensor de posição que fornece outro sinal de posição ao controlador.
Armar
- 4 O braço é montado na parte vertical do elo. Ele fornece o máximo "alcance" ao robô e apóia o pulso. O braço contém os eixos de transmissão que operam o pulso. Três motores, ou uma combinação de motores e cilindros hidráulicos, são
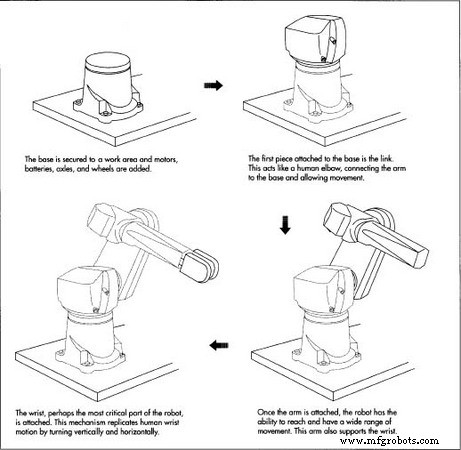 Um robô industrial pode conter 2.000 peças individuais e é montado por equipes. Essas equipes começam com a base e montam os componentes no robô até que esteja completo e pronto para teste e acabamento. conectado aos eixos de transmissão. Uma vez que o braço e a junta de ligação devem suportar toda a carga do pulso, isso é feito com rolamentos grandes e um pino de articulação.
Um robô industrial pode conter 2.000 peças individuais e é montado por equipes. Essas equipes começam com a base e montam os componentes no robô até que esteja completo e pronto para teste e acabamento. conectado aos eixos de transmissão. Uma vez que o braço e a junta de ligação devem suportar toda a carga do pulso, isso é feito com rolamentos grandes e um pino de articulação.
Pulso
- 5 O pulso é o mecanismo crítico do robô. É o pulso que mais replica o movimento humano girando e girando para colocar a pistola de tinta, soldador ou outra ferramenta na posição correta. Muitos robôs também possuem componentes eletrônicos com detecção de carga no pulso para sinalizar quando uma obstrução foi atingida ou quando uma carga é muito pesada para ser recolhida com segurança. Sensores de posição adicionais e componentes eletrônicos de controle de ferramenta também são montados no braço e no pulso.
Fiação para o controlador
- 6 Assim que a montagem mecânica for concluída, a fiação e o encanamento do robô podem ser finalizados. Todos os
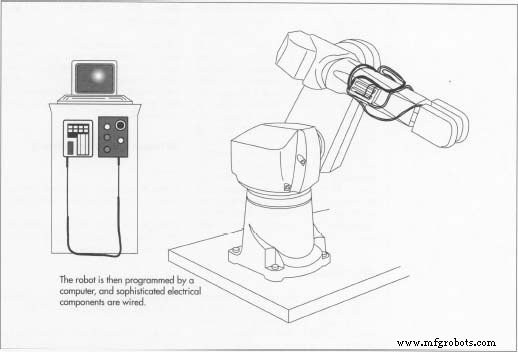 os sensores do motor e os componentes elétricos devem ter fios para alimentação e para levar informações de volta ao computador de controle. Ocasionalmente, o espaço não utilizado nos braços e na base fornece um lugar prático para montar alguns dos componentes eletrônicos do controlador, encurtando os caminhos da fiação. Os cilindros hidráulicos e de ar possuem mangueiras que carregam pressão para operá-los, controladas a partir das válvulas da base. A maioria desses fios e mangueiras são direcionados de volta ao gabinete do controlador que, para robôs móveis, é conectado à base. Se o robô estiver estacionário, esse controlador geralmente é montado a vários metros de distância e conectado por um cordão umbilical. Após a montagem, os braços e a coluna do robô são às vezes cobertos com proteções e escudos para protegê-los de spray de tinta, faíscas de soldagem ou outros perigos no ambiente.
os sensores do motor e os componentes elétricos devem ter fios para alimentação e para levar informações de volta ao computador de controle. Ocasionalmente, o espaço não utilizado nos braços e na base fornece um lugar prático para montar alguns dos componentes eletrônicos do controlador, encurtando os caminhos da fiação. Os cilindros hidráulicos e de ar possuem mangueiras que carregam pressão para operá-los, controladas a partir das válvulas da base. A maioria desses fios e mangueiras são direcionados de volta ao gabinete do controlador que, para robôs móveis, é conectado à base. Se o robô estiver estacionário, esse controlador geralmente é montado a vários metros de distância e conectado por um cordão umbilical. Após a montagem, os braços e a coluna do robô são às vezes cobertos com proteções e escudos para protegê-los de spray de tinta, faíscas de soldagem ou outros perigos no ambiente.
Instalação
A instalação ocorre no site do usuário. Se / estacionário, o robô é preso ao chão com parafusos. Se em movimento, um fio-guia é enterrado no chão para que o robô acompanhe de tarefa em tarefa. Ele segue o fio por sinais de rádio e também usa o fio para se comunicar com o controlador central. Recentemente, os lasers foram usados para eliminar o fio. O robô é guiado em seu caminho por um feixe de laser refletido nas paredes. Alguns projetos também incorporam câmeras de vídeo. As aplicações estacionárias geralmente requerem que cercas sejam construídas ao redor do robô para que um humano desavisado não entre na área de trabalho do robô e se machuque. Após a instalação, o fabricante do robô geralmente fornece treinamento de operação e manutenção ao cliente.
Controle de qualidade
O teste consiste em duas partes:precisão funcional e um processo conhecido como "burn-in". Assim que o robô montado é energizado com energia, um programa de computador instrui o controlador a mover o braço do robô em uma série de movimentos. Registros precisos desses movimentos são feitos, todos os problemas corrigidos. Em seguida, o robô é colocado em operação continuamente por várias horas. Isso é chamado de burn-in e tem duas funções. Primeiro, qualquer perda de precisão pode ser detectada usando os dados do teste funcional. Tal caso indicaria um problema de projeto, conjunto solto, rolamento defeituoso ou semelhante. Em segundo lugar, o teste de funcionamento eleva os componentes eletrônicos e hidráulicos à temperatura operacional. Isso é importante porque o controlador é programado com fatores de correção chamados offsets. Esses deslocamentos compensam o feedback dos sensores de posição para permitir a variação de temperatura dos componentes. Com a máquina aquecida, o programador pode colocar os fatores de correção no programa para fornecer um desempenho ideal.
O Futuro
A robótica é um dos segmentos de crescimento mais rápido do mercado de máquinas industriais. Impulsionados principalmente pelos avanços na tecnologia da computação, os robôs mais antigos tornam-se rapidamente obsoletos por causa de novos modelos. As empresas japonesas estão liderando o desenvolvimento da robótica e muitos de seus projetos incorporam a nova ciência da inteligência artificial, que permite que os robôs "aprendam" e "adaptem" suas operações por conta própria.
Os avanços nas câmeras e na visão eletrônica também impactarão o robô na década de 1990. Muitos robôs entrarão em novas áreas de uso, como serviços médicos e alimentícios, o que colocará mais pessoas em contato com eles do que ocorria anteriormente no local de trabalho industrial.
Processo de manufatura
- Quais robôs de pintura industrial funcionam melhor?
- O que está impedindo a integração do robô industrial de volta?
- Manutenção preventiva para robôs industriais
- Robôs Industriais na Indústria Automotiva
- Robôs guiadores manuais
- 5 Ws de Robot Healthcare Helpers
- robótica industrial do século XXI
- Robôs colaborativos de implantação rápida
- Introdução aos robôs colaborativos
- Robôs industriais de hoje