


Arduino Trash-Bot (abrir / fechar automaticamente a lixeira)
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
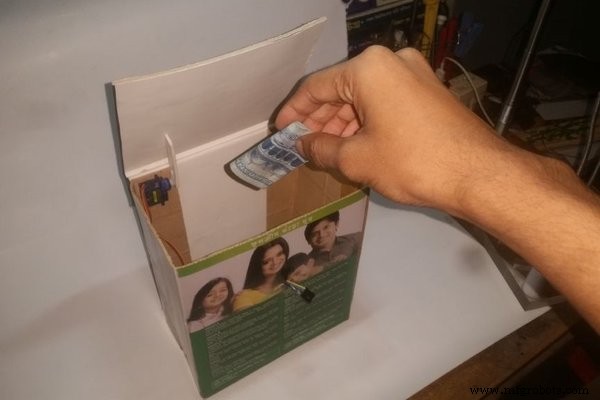
Tudo está ficando mais inteligente, certo? Então, por que não sua lixeira? Esta lixeira abre e fecha sua tampa se encontrar algum lixo na frente dela. Você só precisa levar o lixo até ele e ele se abrirá automaticamente e esperará que você o alimente mais, então, após um certo atraso, ele se fechará automaticamente. Assista ao vídeo para ver exatamente o que ele pode fazer.
Vamos começar.
Etapa 1:componentes



(Mais 2 imagens)
- Arduino Uno (qualquer placa)
- Servo motor (estou usando micro servo sg90)
- sensor de ultrassom HCSR04
- Braços do servo (ao lado do servo na foto 2)
- Papelão (apenas uma fatia)
- Lixeira
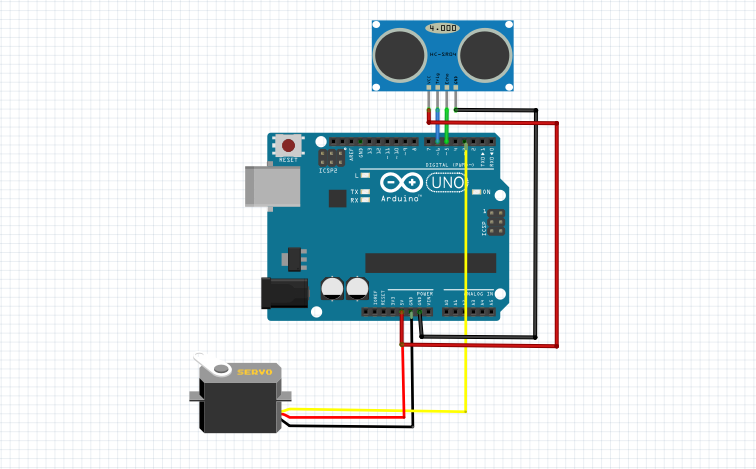
Etapa 2:construir o circuito
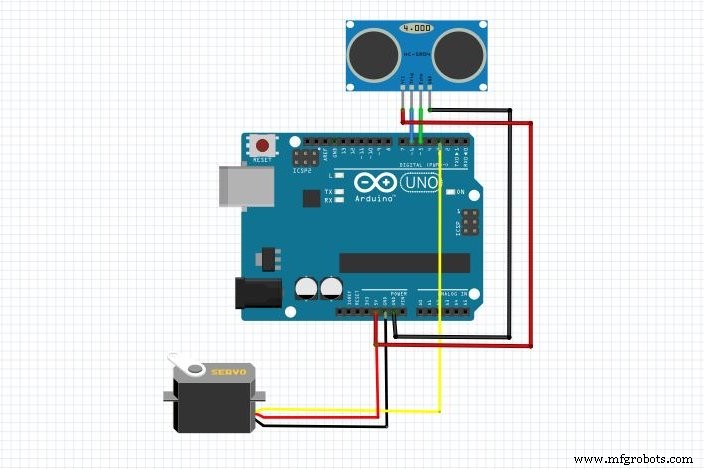
O circuito é tão fácil. Como o servo e o sonar consomem menos energia, você pode ligá-los diretamente da fonte do Arduino 5v. Apenas lembre-se de alimentar o Arduino com mais de 7,4 V DC ou pelo menos 7v.
- Dados do servo (amarelo) para o pino 3 do Arduino
- Servo vcc (vermelho) a 5v do Arduino
- Servo aterrado (preto / cinza) para Arduino Gnd
- Sensor de sonar trigonométrico para Arduino 6
- Eco do sensor de sonar para Arduino 5
- Vcc para Arduino 5v
- Gnd para Arduino Gnd
Etapa 3:Conecte o braço servo



Basta pegar este braço servo e conectá-lo a uma longa peça de papelão com cola quente ou outras colas. Você também pode usar um palito de sorvete em vez de papelão. Em seguida, conecte o braço longo do servo ao servo motor.
Etapa 4:adicionar servo e sensor de sonar à lixeira



Conecte o sensor de sonar voltado para a caixa desta forma. E então adicione o servo motor como este nas figuras 2 e 3, de modo que o servo possa girar para cima.
Etapa 5:o código
Link do código:https://github.com/ashraf-minhaj/Trash-bot
Programei o Arduino de forma que se ele vir qualquer lixo (literalmente qualquer coisa) em um intervalo de 50 cm, o servo vai a 50 graus e atinge a tampa superior da caixa, de forma que a tampa superior é aberta, aguarde três segundos, em seguida, gira automaticamente para 160 graus e, assim, a tampa superior é fechada. Então, agora você vê um bot de lixo de abertura / fechamento automático.
#include Servo servo; int const trigPin =6; int const echoPin =5; void setup () {pinMode (trigPin, OUTPUT); pinMode (echoPin, INPUT); servo.attach (3);} void loop () {duração interna, distância; digitalWrite (trigPin, HIGH); delay (1); digitalWrite (trigPin, LOW); // Medir a entrada de pulso em echo pinduration =pulseIn (echoPin, HIGH); // A distância é a metade da duração dividida por 29,1 (da folha de dados) distance =(duração / 2) / 29.1; // se a distância for inferior a 0,5 metro e superior a 0 (0 ou menos significa acima do intervalo) if (distance <=50 &&distance> =0) {servo.write (50); delay (3000);} else {servo.write (160);}
Etapa 6:pronto

Agora, basta ligar o Arduino com mais de 7v e você terá um robô de lixeira.
Obrigada.
[Se você gosta do meu trabalho, apoie-me inscrevendo-se no meu canal no YouTube]
Código
- código do arduino trash-bot
código do arduino trash-bot C / C ++
#includeServo servo; int const trigPin =6; int const echoPin =5; void setup () {pinMode (trigPin, OUTPUT); pinMode (echoPin, INPUT); servo.attach (3);} void loop () {duração interna, distância; digitalWrite (trigPin, HIGH); delay (1); digitalWrite (trigPin, LOW); // Medir a entrada de pulso em echo pinduration =pulseIn (echoPin, HIGH); // A distância é a metade da duração dividida por 29,1 (da folha de dados) distance =(duração / 2) / 29.1; // se a distância for inferior a 0,5 metro e superior a 0 (0 ou menos significa acima do intervalo) if (distance <=50 &&distance> =0) {servo.write (50); delay (3000);} else {servo.write (160);} // Esperar 60 ms não prejudicará nenhum onedelay (60);}
Esquemas
código do arduino trash-bot
https://github.com/ashraf-minhaj/Trash-botProcesso de manufatura