Blind Stick Navigator
Componentes e suprimentos
 | | × | 1 | |
 | | × | 1 | |
 | | × | 1 | |
| | | × | 1 | |
| | | × | 1 | |
| | | sensor ultrassônico hc-sr04 | | × | 1 | |
| | | × | 1 | |
 | | Fios de jumpers (genérico) | | × | 1 | |
 | | Bateria de 9 V (genérica) | | × | 1 | |
Aplicativos e serviços online
 | | |
| | | aplicativos de telefone 1sheeld | | |
Sobre este projeto
A história começou quando vi um cego se esforçando ao máximo para passar por obstáculos como buracos na estrada, escadas, etc. com sua tradicional bengala cega. Realmente me motivou a tentar construir este protótipo, embora eu não seja especialista o suficiente no manuseio de dispositivos eletrônicos. Usando diferentes tipos de fontes na internet, consegui concluí-lo no ano passado durante meu projeto de último ano. Além disso, também aprimorei o protótipo adicionando a localização GPS. Graças a 1Sheeld, realmente me ajuda a terminar este protótipo em 6 meses.
Etapa 1
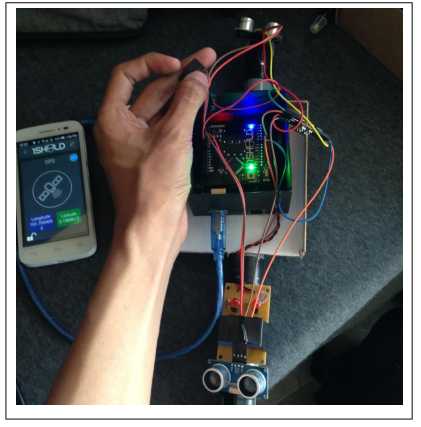
Para ligar o Blind Stick Navigator, ele precisa ser alimentado por energia externa. Estou usando bateria de 9v como uma introdução sobre como ela é capaz de desligar. Pelo que vi, meu protótipo tinha a desvantagem de fornecer uso de energia a longo prazo. Portanto, ele precisa de um aprimoramento como painel solar / energia de alguma forma.
Etapa 2
Após ligá-lo usando a bateria que conecta ao adaptador de alimentação USB do microcontrolador Arduino Uno, o guardião precisa sempre deixar a conexão Bluetooth (smartphone Android) conectando ao microcontrolador. Em seguida, você precisa abrir os aplicativos 1Sheeld que já estão instalados no smartphone e habilitar os recursos de GPS e SMS.
** Sim, eu sei que os cegos não podem ver e acessar o smartphone, mas pelo menos se eu ou você conseguirmos fazer a modificação no smartphone com sistema operacional Android, será muito mais fácil. Já tentei o meu melhor para encontrar um smartphone melhor que forneça botão braille, mas não consegui. Assim, espero que no futuro haja uma atualização do meu protótipo.
Etapa 3
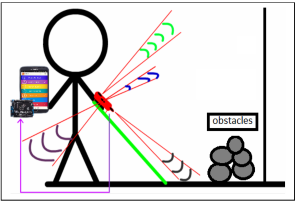
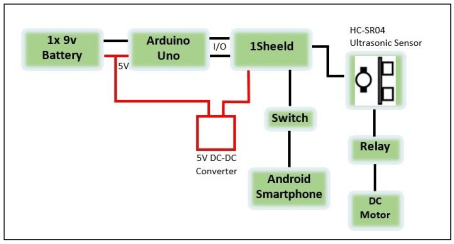
Com base no diagrama de blocos acima, como você pode ver, é assim que acontece a conexão entre os dispositivos. Após estes dois serem ligados, os cegos podem começar a usar o Blind Stick Navigator. Com base na observação da tradicional bengala branca, os cegos sempre giram em torno do bastão cego para obter uma confirmação do seu entorno. Mas, com o Blind Stick Navigator, ele os ajudará a obter notificação vibratória sobre o obstáculo na vista intermediária e inferior. O obstáculo detectado usando o sensor ultrassônico HC-SR04. Ele foi preso na parte superior e inferior da haste. Estou usando tubo de PVC porque posso colocar o motor DC vibratório dentro do tubo de PVC. O modo de vibração pode ser alterado no código fornecido usando o software Arduino IDE.
Etapa 4
Além disso, o Blind Stick Navigator pode fornecer longitude e latitude de localização de cegos. Isso porque, o smartphone atua como provedor e fornece localização GPS para esse processo. O botão de alternância é adicionado para tornar mais fácil aos cegos clicar no botão de emergência para informar ao destinatário que ele já perdeu ou está em perigo. Ao clicar uma ou duas vezes, o smartphone enviará uma mensagem informando que precisam de ajuda e faça uma busca com base no link GPS e Google Map. O número do destinatário pode ser definido se a mensagem deseja ser enviada à autoridade ou ao tutor apenas dos cegos. O comprimento do stick é ajustável de acordo com a altura do usuário. Para este protótipo, estou usando um comprimento específico e o comprimento da detecção pode ser alterado no código.
Etapa 5
Por último, mas não menos importante, espero que meu protótipo seja usado em todo o mundo ou seja comercializado, assim, ajude os cegos durante sua jornada / vida. Além disso, sinto muito pela minha gramática porque meu inglês não é muito bom. Não sei descrever mais neste post. Todas as informações já compiladas no anexo. Você pode consultar mais sobre este projeto com base no link que forneci abaixo.
Documento do Projeto:
Cartaz do Projeto:
Vídeo do Projeto:
Código
- OneSheeldBlindStickNavigator
OneSheeldBlindStickNavigator C / C ++
#define CUSTOM_SETTINGS # define INCLUDE_GPS_SHIELD # define INCLUDE_SMS_SHIELD / * Inclui a biblioteca 1Sheeld. * / # include #include #define trigPinL 4 # define echoPinL 5 # define trigPinHin 6 #define Vib1 12 # define Vib2 13 # define SW 8 / * Define um sinalizador booleano. * / boolean isInRange =false; float lat; float lon; String PhoneNumber ="0134087286"; String Message; String Message1; String Message2; char latitude [10]; char longitude [10]; void setup () {pinMode (trigPinL, SAÍDA); pinMode (echoPinL, INPUT); pinMode (trigPinH, OUTPUT); pinMode (echoPinH, INPUT); pinMode (Vib1, OUTPUT); pinMode (Vib2, OUTPUT); pinMode (SW, INPUT); / * Iniciar a comunicação. * / OneSheeld.begin (); // Serial.begin (9600);} void loop () {long durationL, distanceL, durationH, distanceH, MixDist; digitalWrite (trigPinL, LOW); // Adicionada esta linha delayMicroseconds (2); // Adicionada esta linha digitalWrite (trigPinL, HIGH); atrasoMicrosegundos (10); // Adicionada esta linha digitalWrite (trigPinL, LOW); duraçãoL =pulseIn (echoPinL, HIGH); distânciaL =(duraçãoL / 2) / 29,1; digitalWrite (trigPinH, LOW); // Adicionada esta linha delayMicroseconds (2); // Adicionada esta linha digitalWrite (trigPinH, HIGH); atrasoMicrosegundos (10); // Adicionada esta linha digitalWrite (trigPinH, LOW); duraçãoH =pulseIn (echoPinH, HIGH); distânciaH =(duraçãoH / 2) / 29,1; // Serial.println (distanceL); // Serial.println (distanceH); // delay (1000); if (distanceL> 40) {digitalWrite (Vib1, HIGH); } if (distanceL <40) {digitalWrite (Vib1, LOW); } if (distanceH <100) {digitalWrite (Vib1, HIGH); atraso (200); digitalWrite (Vib1, LOW); atraso (200); } / * Verifique sempre se o GPS do smartphone e uma determinada longitude e latitude estão na faixa de 100 metros. * / //if(GPS.isInRange(30.0831008,31.3242943,100)) // {// if (! isInRange) // {/ * Enviar SMS. * / lat =GPS.getLatitude (); lon =GPS.getLongitude (); Message1 =String (lat, 8); Message2 =String (lon, 8); if (digitalRead (SW) ==0) {Message ="Preciso de ajuda! Estou na latitude:" + Message1 + "e longitude:" + Message2; Message ="Google Maps - https://www.google.co.in/maps/place/" + Message1 + "," + Message2; SMS.send (PhoneNumber, Message); atraso (3000); } // isInRange =true; //} //} // else // {// if (isInRange) // {/ * Enviar SMS. * / // SMS.send ("+ 601123413946", "Smartphone não está dentro do alcance."); // isInRange =false; //} //} delay (1000);}
Esquemas
OneSheeldTONGKAT.fzz


