


Biblioteca de controle do motor CC
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Aqui apresento a biblioteca Arduino para controlar o motor DC. A biblioteca possui tantas facilidades e flexibilidade que pode controlar qualquer motor DC da maneira necessária. A biblioteca é projetada de acordo com o controle de movimento industrial requisitos. A biblioteca tem 16 funcionalidades diferentes para controlar o motor da maneira mais versátil. Aqui está a lista de facilidades da biblioteca
1. Ele controla a direção de rotação do motor
2. Ele controla a velocidade do motor de 0-100%
3. Pode fornecer partida suave para o motor no tempo especificado - significa que a velocidade do motor aumentará de 0% até o nível desejado no tempo especificado
4. Pode fornecer parada suave para o motor no tempo especificado - significa que a velocidade do motor diminuirá da velocidade atual para 0% no tempo especificado
5. Pode aplicar controle de jog para o motor em qualquer direção - significa que o motor vai sacudir na direção especificada
6. Pode aplicar DC BREAK (significa PARADA imediata ou de emergência) ao motor
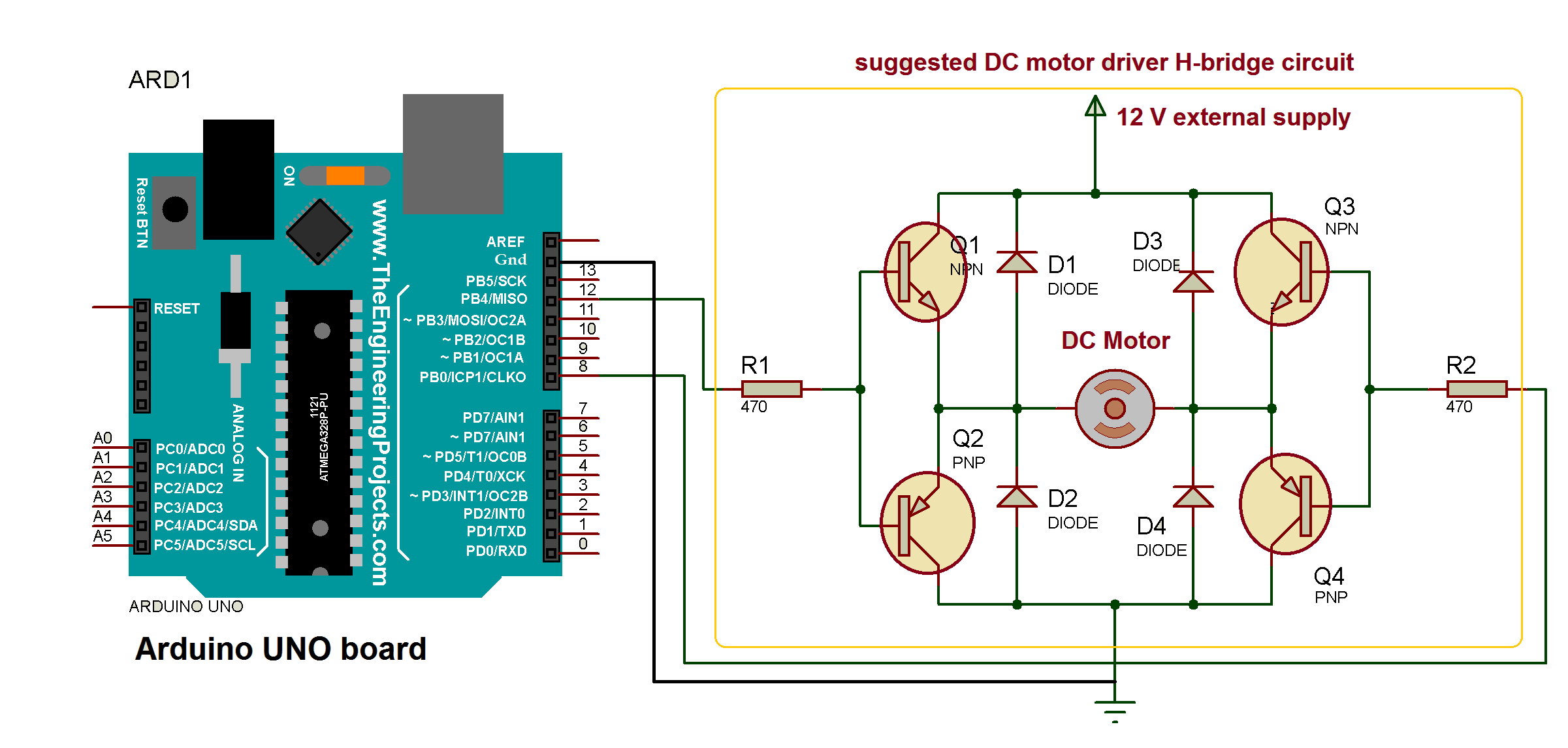
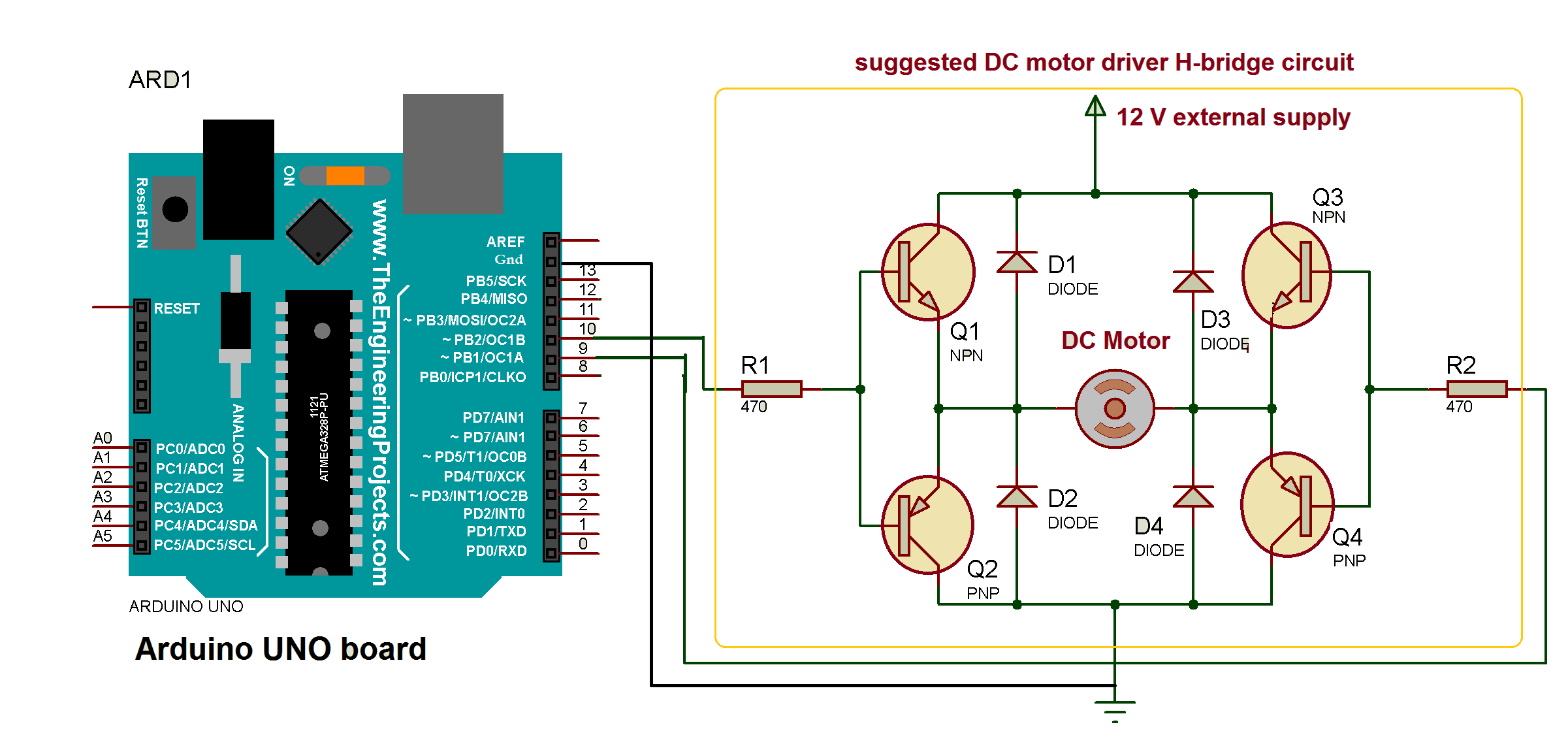
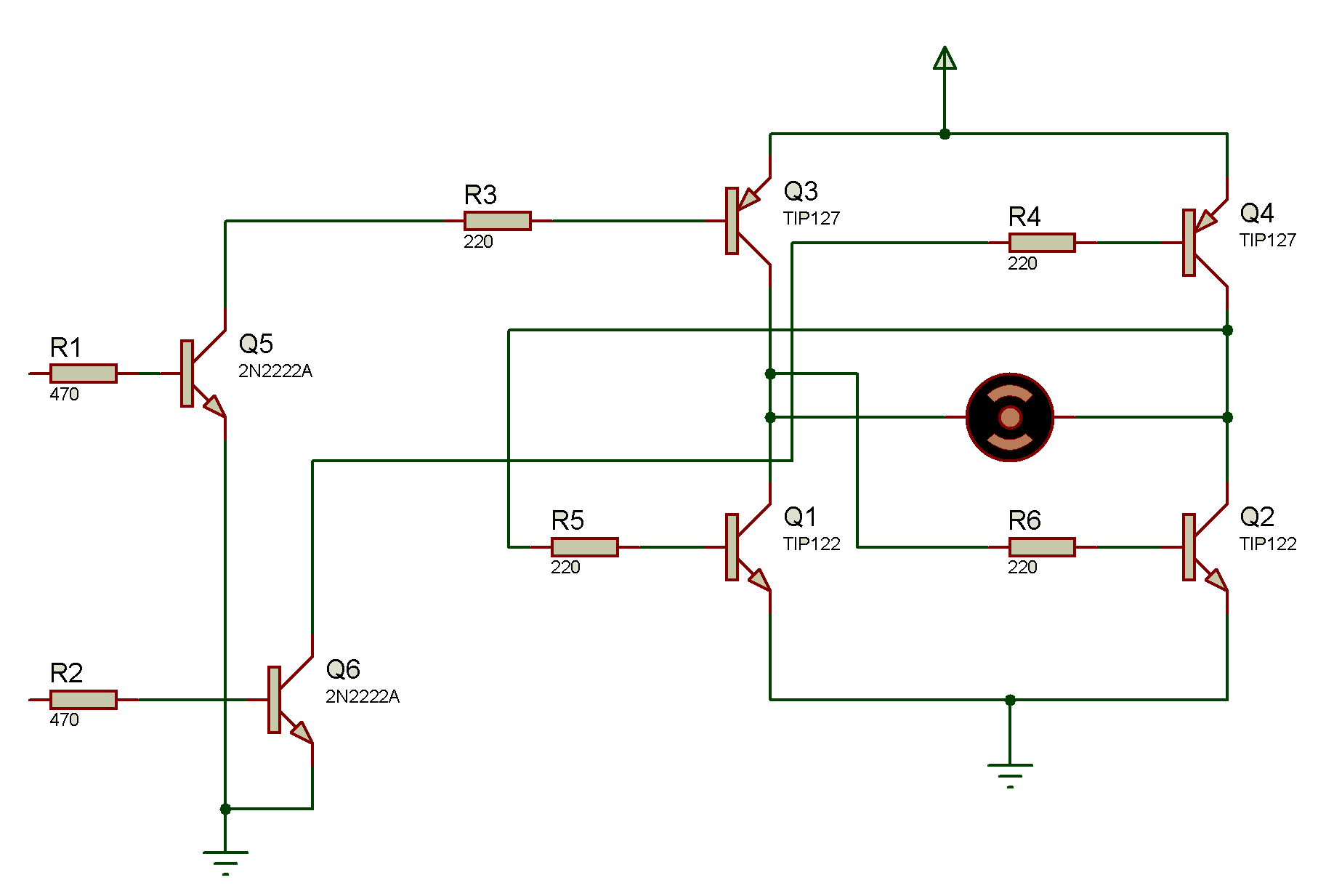
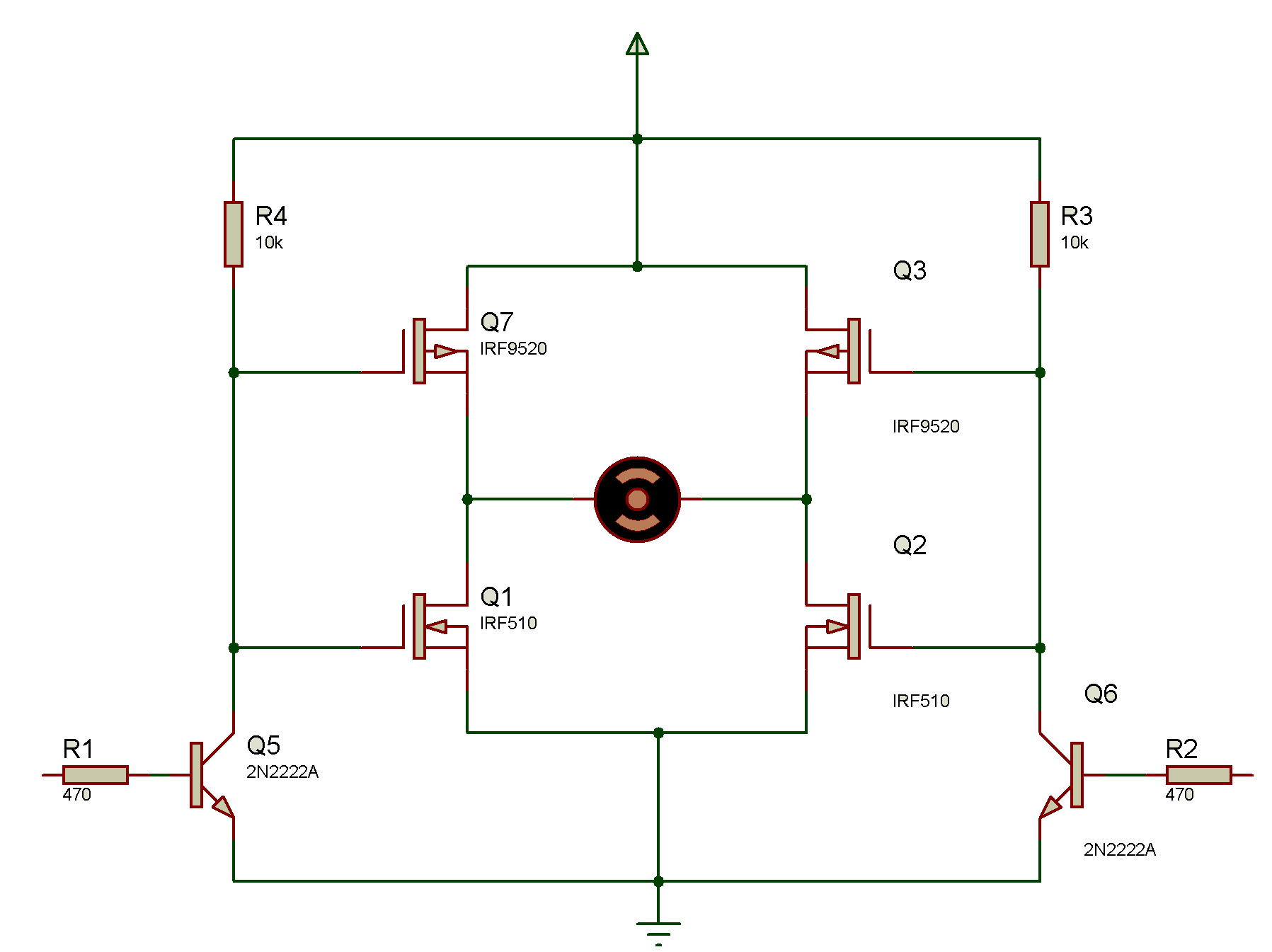
As breves descrições de todas as funções da biblioteca são fornecidas aqui. Alguns exemplos são dados a seguir que explicam como o motor é controlado usando esta biblioteca. Há três vídeos fornecidos que mostram a demonstração desses exemplos. Por fim, é sugerido o circuito que usa o circuito H-Bridge, amplamente utilizado para controlar motores DC.
Para usar esta biblioteca em seu esboço do Arduino, basta copiar o DC_Motor pasta no diretório raiz da pasta da biblioteca do arduino como C:\ arduino-1.6.7 \ libraries
Descrição das funções da biblioteca:
1. DC_Motor (int pin1, int pin2): esta função declara os pinos do Arduino que acionam o motor DC
2. DC_Motor (int pin1, int pin2, int speed_flag): esta função declara os pinos de saída analógica do Arduino que aciona o motor DC
3. start_motor (int dir): esta função começa a girar o motor na direção especificada. Se a direção for 1 - o motor começará a girar para frente e vice-versa
4. encaminhar (): esta função começará a girar o motor na direção para frente
5. reverso (): esta função começará a girar o motor na direção reversa
6. dc_break (): esta função irá parar instantaneamente de girar o motor *
7. stop_motor (): esta função irá parar de girar o motor
8. jogg_full_speed (int dir): esta função aplicará solavanco ao motor por 5 segundos em velocidade total na direção necessária
* Nota:- esta função só funcionará se o motor DC tiver arranjos internos para tal interrupção DC. Além disso, o circuito do driver do motor adequado deve ser projetado com resistências de frenagem dinâmica (DBR) e todo cuidado deve ser tomado para que o motor ou o circuito não sejam danificados.
Todas as funções acima fornecem controle simples para o motor DC. Eles não controlam a velocidade do motor. As próximas 8 funções controlam a velocidade e também a direção do motor. Mas é necessário selecionar os pinos de saída analógica do Arduino para usar essas funções. O motor DC deve ser inicializado com a 2ª função junto com o sinalizador de velocidade definido como 1
9. set_speed (int speed): esta função irá definir a velocidade do motor DC entre 0 a 100%
10. forward_with_set_speed (): esta função começará a girar o motor DC para frente na velocidade definida
11. reverse_with_set_speed (): esta função começará a girar o motor DC reverso na velocidade definida
12. run_motor (int dir, int speed): esta função irá girar o motor DC em qualquer direção na velocidade definida
13. jogg_set_speed (int dir, int speed): esta função irá aplicar jerk ao motor em qualquer direção na velocidade definida
14. motor_speed_zero () *: a função irá reduzir a velocidade do motor para 0 - significa parar o motor
15. soft_start (int dir, int speed, inttime_in_sec): esta função aumentará a velocidade do motor de 0 até o nível desejado no tempo especificado em qualquer direção. O tempo deve ser selecionado em segundos
16. smooth_stop (int time_in_sec): esta função irá reduzir a velocidade do motor da velocidade de operação atual para 0 no tempo especificado. O tempo deve ser selecionado em segundos
* Nota:não se pode usar a função stop_motor () aqui porque ela fornece saída digital enquanto esta função fornece saída analógica mínima para fazer a velocidade do motor DC zero. Ao controlar o motor DC com velocidade, não apenas pare o motor, mas torne sua velocidade zero.
Exemplos:
1) Gire o motor DC para frente e para trás em velocidade total (controle de velocidade)
/ * este programa irá girar o motor DC para frente por 5 segundos
em seguida, pare por 2 segundos e gire novamente o motor no sentido inverso por
5 s, pare por 2 s continuamente
criado por A M Bhatt (+ 91-9998476150), Gujarat, INDIA
em 12/10/2016
* /
#include
DC_Motormotor (8, 12);
voidsetup ()
{
}
void loop ()
{
motor.forward ();
atraso (5000);
motor.stop_motor ();
atraso (2000);
motor.reverse ();
atraso (5000);
motor.stop_motor ();
atraso (2000);
}
2) Gire o motor DC para frente e para trás na velocidade definida (com controle de velocidade)
/ * este programa irá girar o motor DC para frente por 5 segundos
a 40% da velocidade, pare por 2 segundos e gire o motor no sentido reverso novamente por
5 s a 80% da velocidade continuamente
criado por A M Bhatt (+ 91-9998476150), Gujarat, INDIA
em 12/10/2016
* /
#include
DC_Motor motor2 (9, 10, 1);
voidsetup ()
{
}
void loop ()
{
motor2.set_speed (40);
motor2.forward_with_set_speed ();
atraso (5000);
motor2.motor_speed_zero ();
atraso (2000);
motor2.set_speed (80);
motor2.reverse_with_set_speed ();
atraso (5000);
motor2.motor_speed_zero ();
atraso (2000);
}
3) Aplicar jog ao motor em ambas as direções com e sem controle de velocidade
/ * este programa aplica jog a dois motores DC diferentes
* aplica jog para o 1º motor em velocidade total em ambas as direções
* e então fornece jog para o 2º motor com 80% da velocidade em reverso
* direção e 30% de velocidade na direção para frente
* criado por Ashutosh M Bhatt (+ 91-9998476150), Gujarat (ÍNDIA)
* em 22/10/2016
* /
#include
Motor DC_Motor (8, 12);
DC_Motor motor2 (9, 10, 1);
voidsetup ()
{
}
voidloop ()
{
motor.jogg_full_speed (1);
motor.jogg_full_speed (0);
motor2.jogg_set_speed (0, 80);
motor2.jogg_set_speed (1, 30);
}
4) Aplicar partida suave e parada suave ao motor
/ * este programa dará partida suave ao motor e aumentará sua velocidade
de 0 a 90% em 10 segundos na direção para frente
então dá uma parada suave de 90% para 0 em 5 segundos
novamente partida suave de 0 a 50% em 6 segundos na direção reversa
e, finalmente, parada suave de 50% para 0 em 3 segundos
criado por A M Bhatt (+ 91-9998476150), Gujarat, INDIA
em 12/10/2016
* /
#include
DC_Motor motor2 (9, 10, 1);
voidsetup ()
{
}
voidloop ()
{
motor2.soft_start (1, 90, 10);
atraso (3000);
motor2.smooth_stop (5);
motor2.soft_start (0, 50, 6);
atraso (3000);
motor2.smooth_stop (3);
}
Código
- Biblioteca de controle de motor DC
Biblioteca de controle do motor DC Arquivo de cabeçalho C
Esta biblioteca controla a velocidade e direção de todos os tipos de motores DCSem visualização (somente download).
Esquemas
Arduino UNO e driver de ponte H usado para controlar o motor DC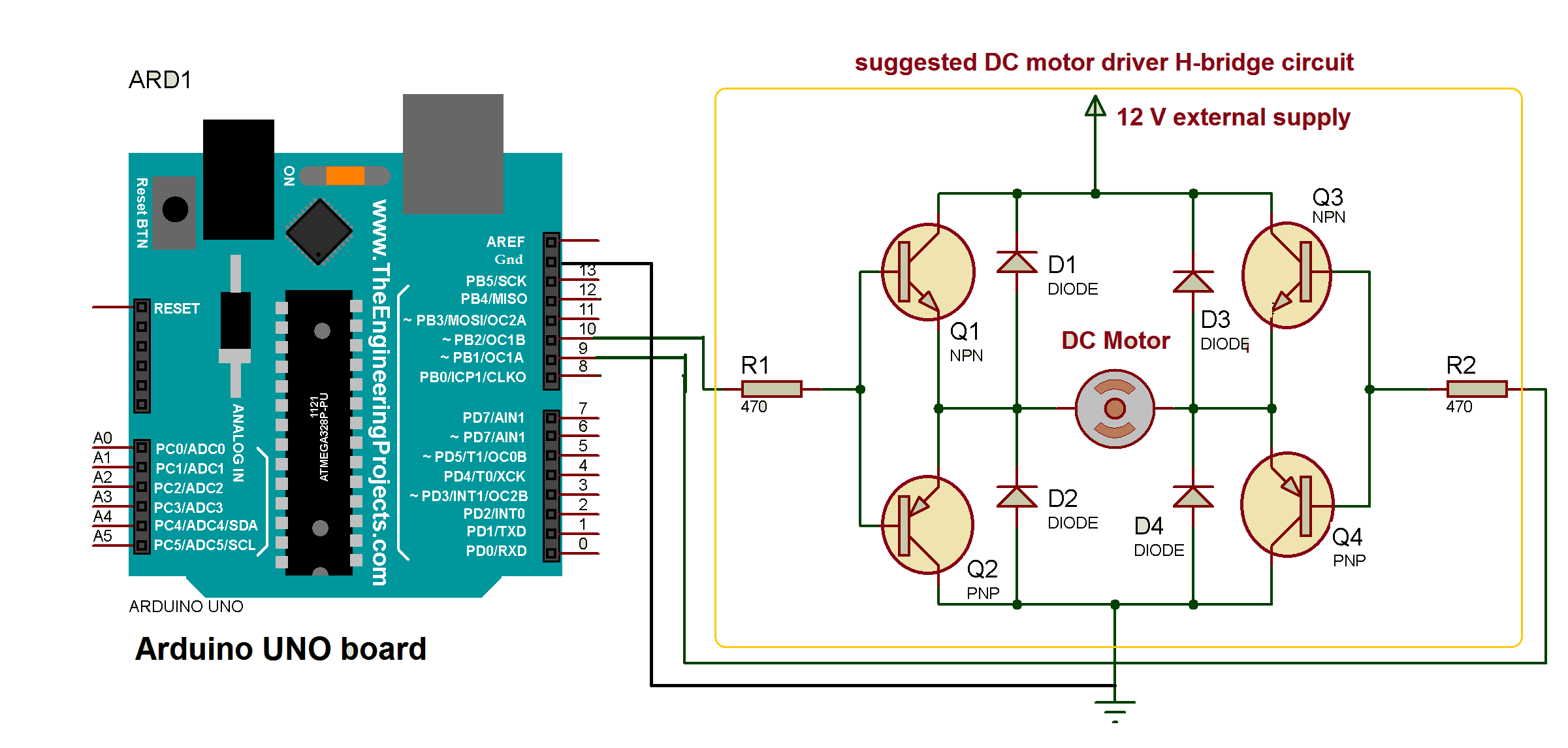
Processo de manufatura
- Controle de um efeito com sensores reais
- Faça uma máquina de escrever trabalhos de casa DIY em casa
- Sistema de detecção de humanos usando Arduino Uno
- Biblioteca de motor de passo bipolar
- Brinquedo controlado pelo Android usando Raspberry Motor Shield
- Obstáculos para evitar o robô com servo motor
- Robô seguidor de linha
- Controle de um robô Roomba com Arduino e dispositivo Android
- Controle do Servo Motor com Arduino e MPU6050
- Robô para navegação interna supercool