


Arduino IoT Robotic Arm
Componentes e suprimentos
 |
| × | 1 | |||
| × | 5 |
Aplicativos e serviços online
 |
| |||
 |
|
Sobre este projeto
Este é meu primeiro braço robótico com os seguintes recursos:
- Robô 5DOF, na verdade 4 se excluirmos a garra
- o cérebro é um Arduino Yun com recursos de IoT
- a interface de controle é construída no aplicativo Blynk
- a cinemática direta é implementada no Matlab usando a caixa de ferramentas de robótica
- uma nova biblioteca que escrevi que realiza um movimento suave
Estou muito feliz com o resultado. Portanto, gostaria de compartilhar com vocês minha experiência e como construí-la.
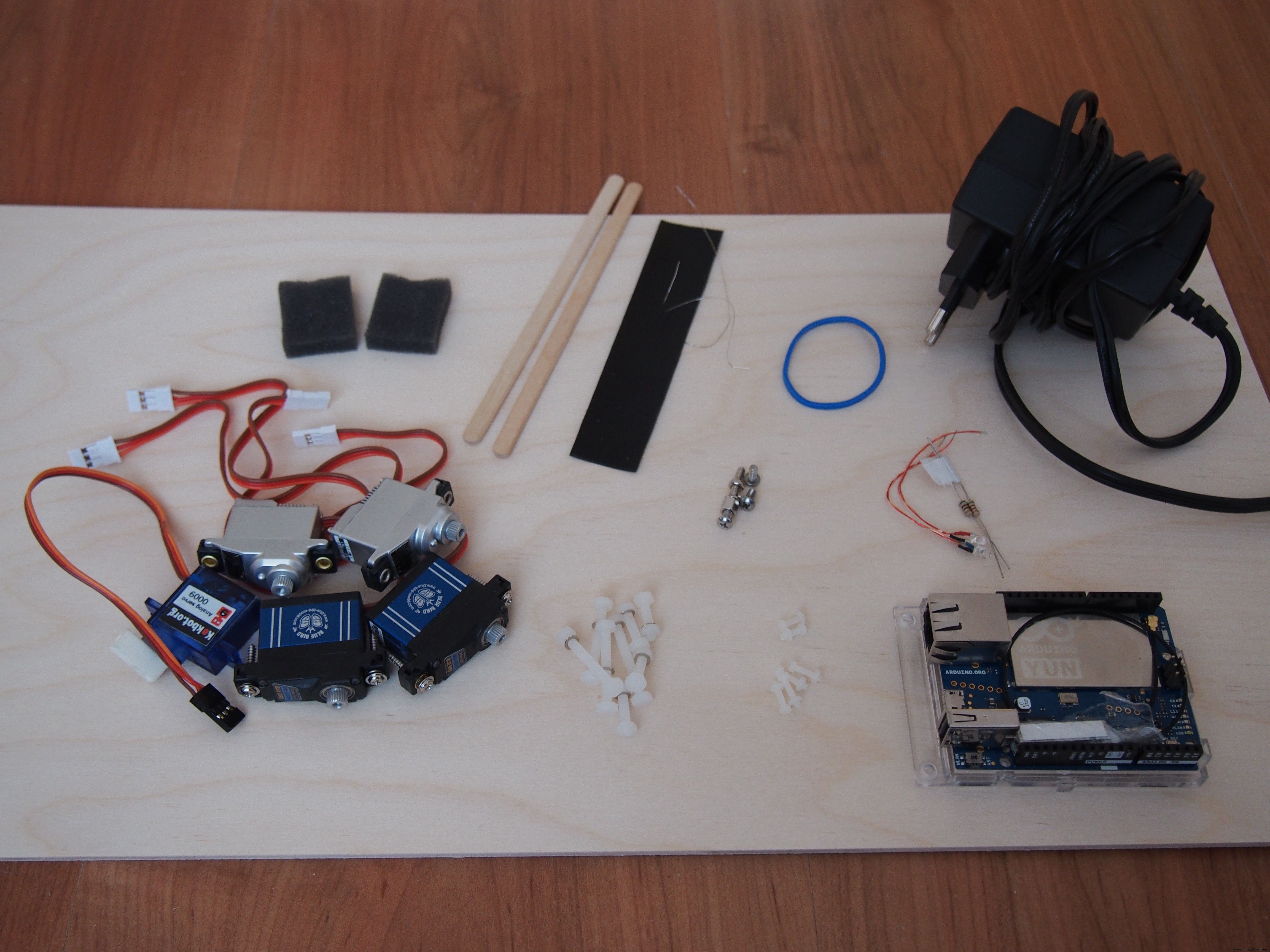
Componentes e materiais
Para construir o robô, você precisa:
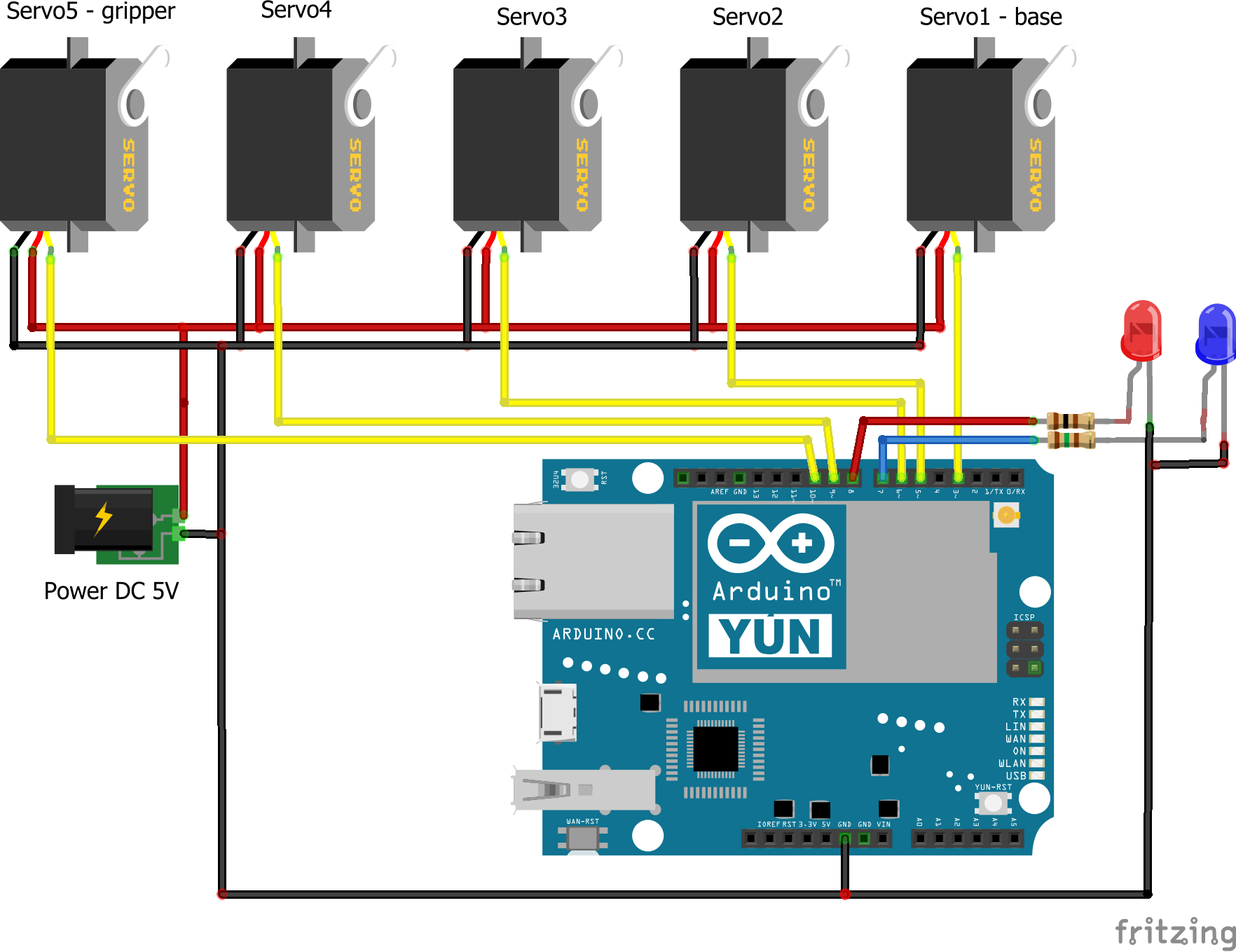
- 1 x Arduino Yun (ou qualquer placa Arduino)
- 5 servo motores
- 1 carregador de 5 V, mínimo 2,5 A
- 2 x Led's
- 2 x resistores, 100 ohm (para led vermelho) e 150 ohm (para led azul), respectivamente
- 2 x varas de mistura de madeira
- 1 x fio metálico (ou semelhante)
- 1 x folha de plástico (tirei de um frasco de gel de banho)
- 1 x elástico
- 2 x pequenas esponjas (ver canto superior esquerdo)
- 9 x parafusos M3 de plástico
- 6 parafusos M2.5 de plástico
- 1 x placa de madeira de 3 mm (30 cm x 50 cm deve ser mais do que suficiente)
- 1 x cola de madeira
- hora de codificação
Construindo o Robô
Para construir o robô, comece medindo o tamanho dos servos e verificando o torque dos servos. Isso lhe dará uma indicação sobre o tamanho dos braços e, eventualmente, o tamanho do robô. No meu caso, encomendei 2 servos micro de alto torque diferentes:primeiro par e segundo par. Estes podem viajar até 140 graus, embora sejam especificados para viajar 120 graus. No entanto, eu aconselho comprar servos de 180 graus para ter mais ângulo de deslocamento.
Para a garra, não há necessidade de um servo de alto torque. O micro-servo mais barato no ebay pode fazer o trabalho.
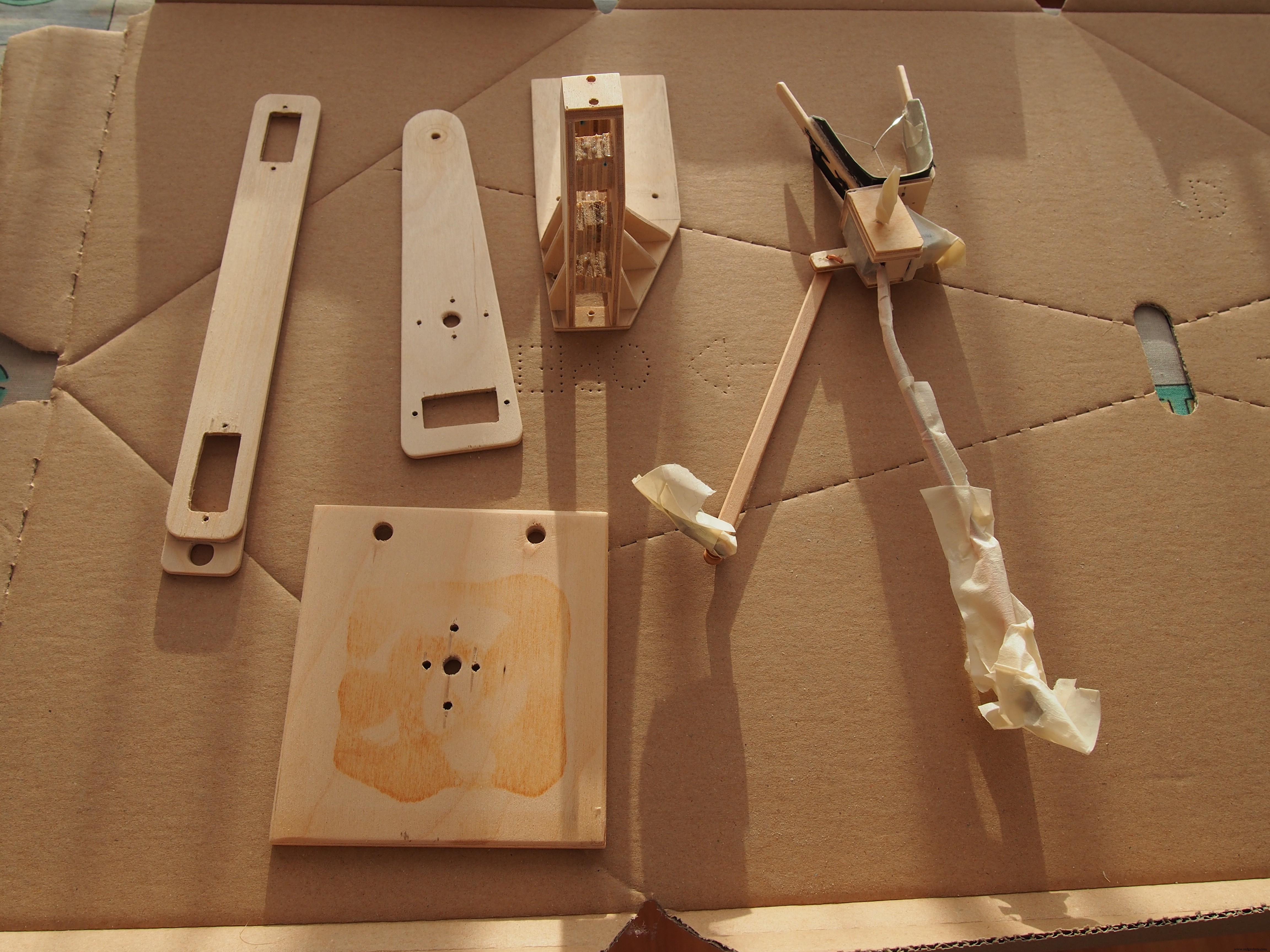
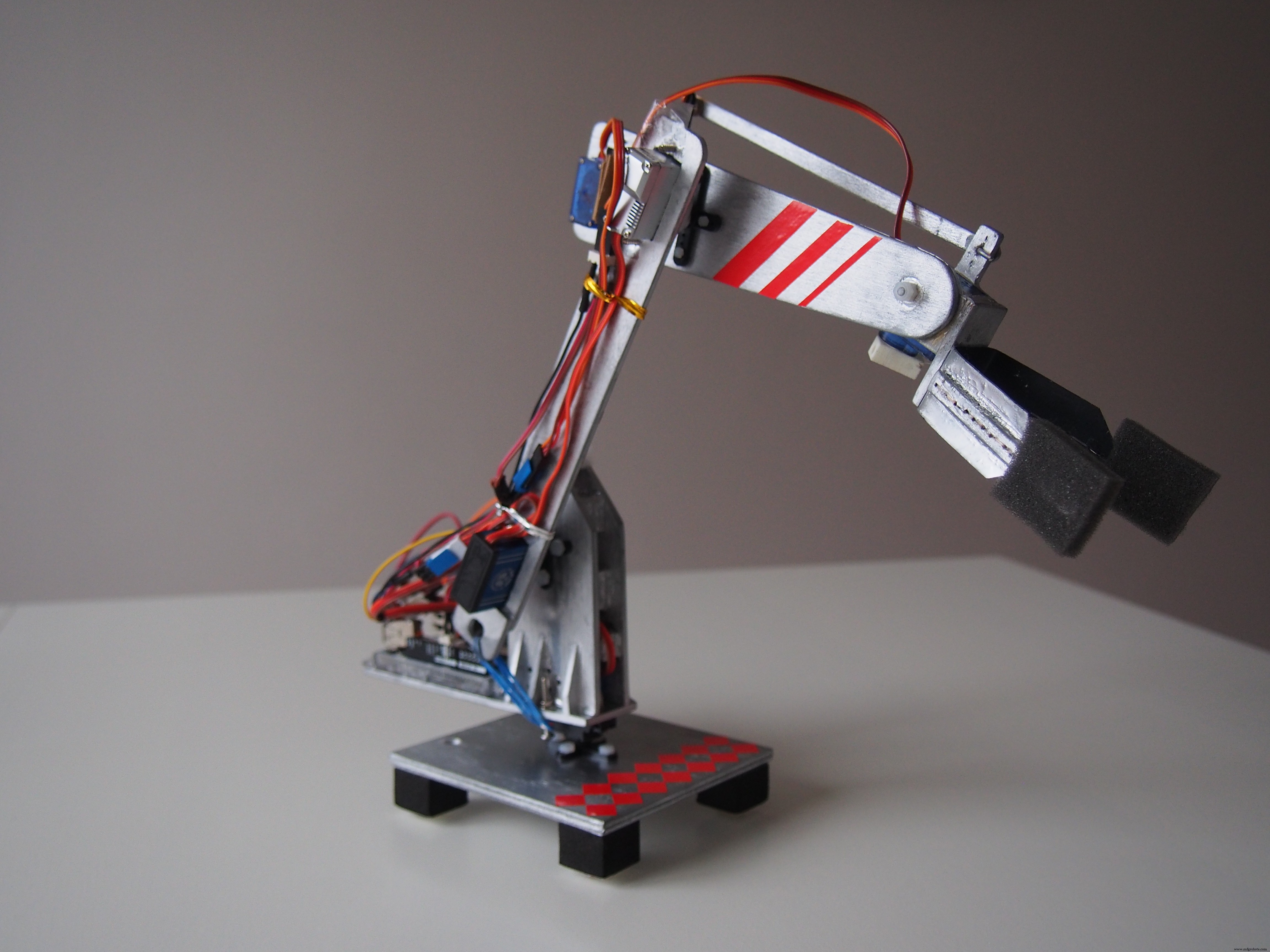
Comece cortando os braços como você vê na Foto 1. Aqui, você pode ser criativo, não há design fixo, você pode criar seu próprio design. Em seguida, construa a pinça usando uma vareta de mistura cortada ao meio e a folha de plástico como retorno de mola. Com os fios conectados ao lado interno, você pode fechar e abrir a garra. Para o meu robô, usei um parafuso M3 para fazer o pivô da garra. O giro da garra é feito por um servo localizado do outro lado do braço para obter o equilíbrio do peso. A potência é transmitida por meio de outra vareta de mixagem (ver Foto 2, parte superior do robô).
Em seguida, construa a base e a placa que contém o servo de base e a placa Arduino Yun (ou outra placa). Junte tudo e você deve ter algo como na Foto 2.
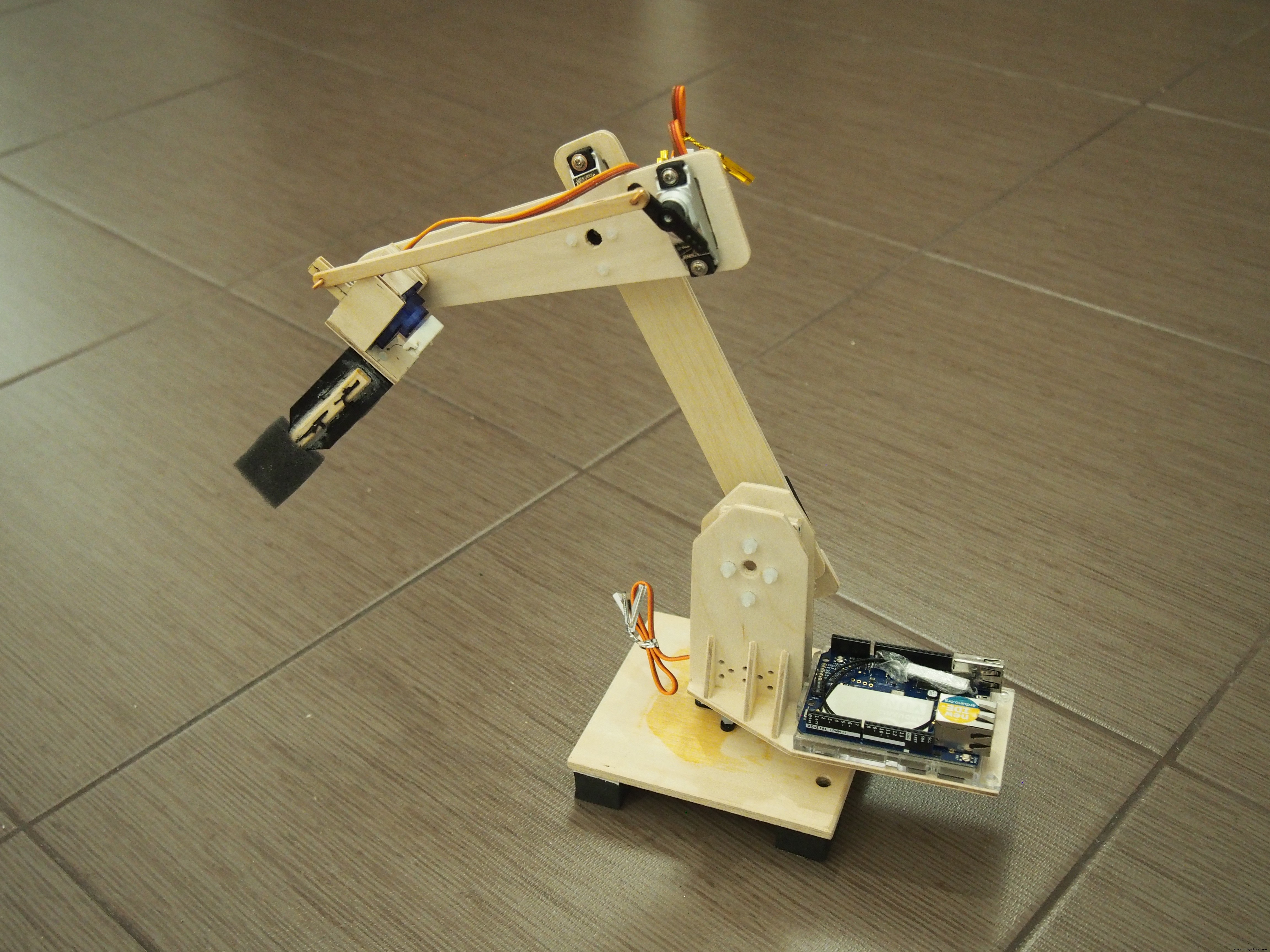
Se você quiser um design mais bonito, lixe os componentes de madeira e pinte-os (como na Foto 3) com sua cor preferida. Para o meu robô, optei por uma cor prata (para imitar o metal) com listras vermelhas. O resultado final é mostrado na Foto 4.

Software
Para o software, comecei fazendo primeiro uma interface em Blynk. Se você nunca usou o Blynk antes, verifique o site para saber como fazê-lo. Deve ser muito fácil e direto.
Nota: Se você não tem uma placa que pode se conectar à internet, não se preocupe, você ainda pode usar o Blynk com uma placa normal, por exemplo, Arduino Uno, através da porta USB. Para fazer isso, leia aqui.
A seguir, vamos para o IDE do Arduino e escrever algum código. Para sua conveniência, anexei o código, para que você possa apenas usá-lo :) Para executá-lo, você precisa fazer o seguinte:
- Configure a placa Arduino Yun.
- Instale a biblioteca Blynk em seu Arduino IDE acessando Sketch> Incluir biblioteca> Gerenciar bibliotecas, procure Blynk e instale-o.
- Adicione a biblioteca SimpleTimer em uma pasta com o nome SimpleTimer à pasta da biblioteca do Arduino, geralmente Arduino \ libraries \
- Adicione a biblioteca MotionGenerator que escrevi, em uma pasta com o nome MotionGenerator para a pasta da biblioteca do Arduino
- Compile e carregue RobotArm_instructables.ino (Observação:não se esqueça de atualizar seu token Blynk)
Nota: A biblioteca MotionGenerator é uma solução com base analítica que fornecerá transições agradáveis e suaves de um ponto a outro. Ele permite limitações na velocidade máxima e aceleração.
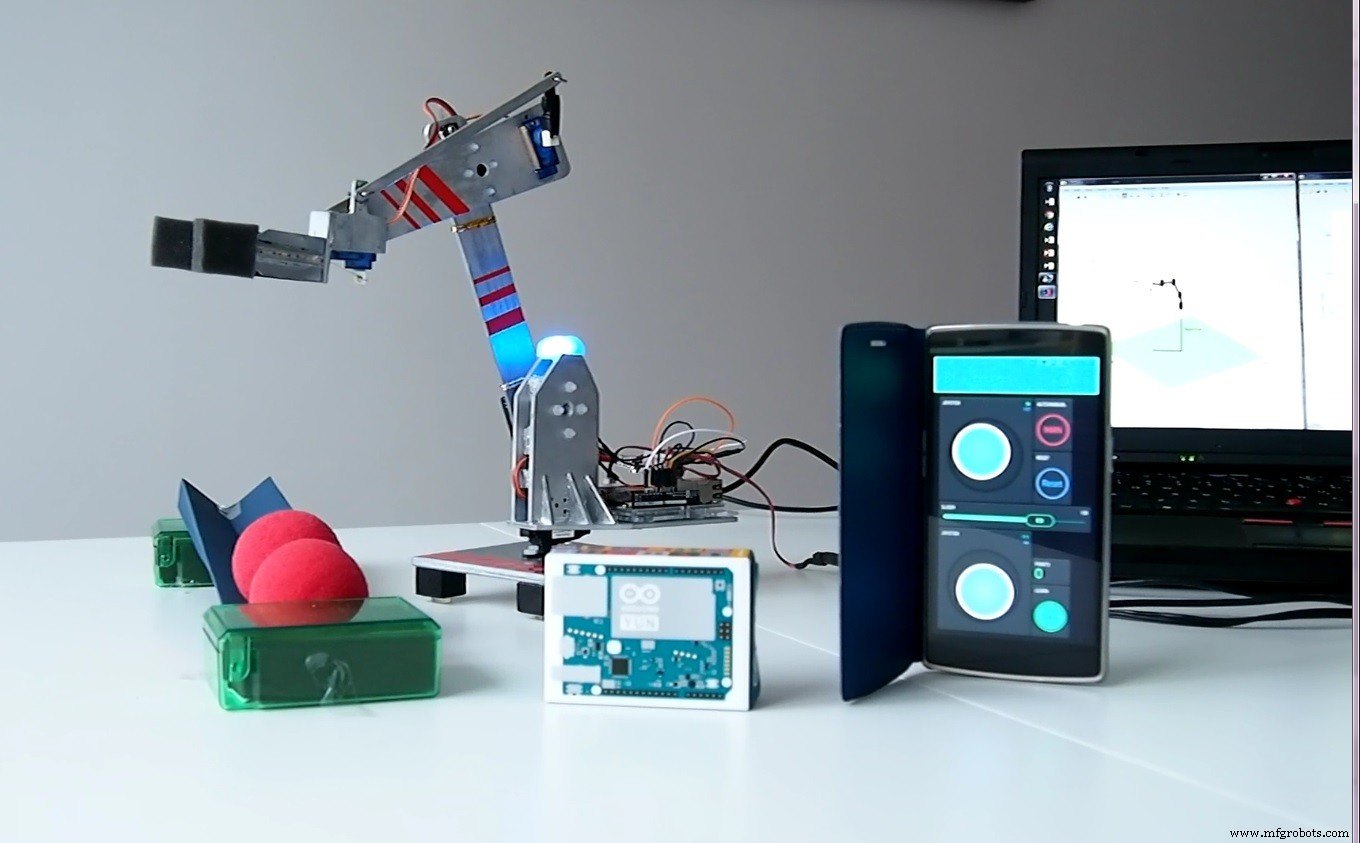

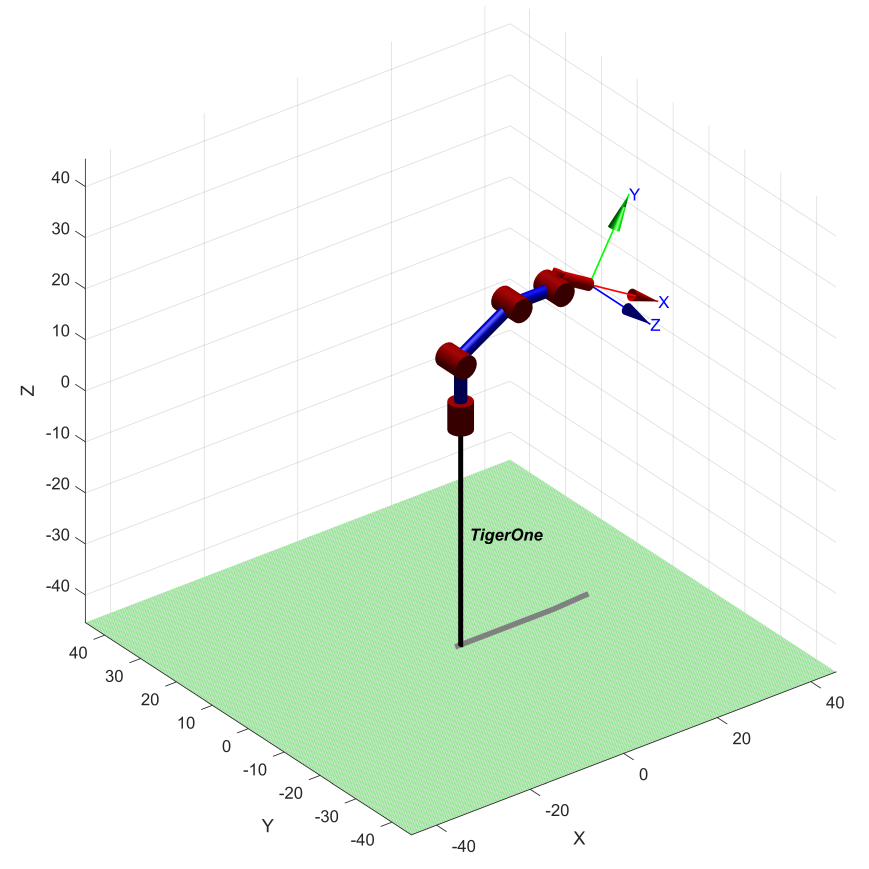
Opcional (cinemática direta, veja a Foto 3 acima): Para isso você precisa do Matlab e do Robotics Toolbox. Se você tiver tudo isso configurado, certifique-se de que o seu robô esteja conectado ao Blynk e à porta USB do seu computador. O Matlab coletará informações do Arduino por meio da comunicação serial. Portanto, certifique-se de preencher a porta COM correta no MainScrip.m. Por fim, basta executar o MainScrip.m.
Nota:a cinemática do robô é para o meu próprio robô. Para o seu robô, as dimensões podem ser diferentes (sinta-se à vontade para ajustar em robotKinematicsFcn.m).
Código
- Arquivos de origem
Arquivos de origem C / C ++
Arquivo Zip contendo os arquivos de código-fonte.Sem visualização (somente download).
Esquemas
Processo de manufatura
- Makerarm:Um braço robótico mega-legal para fabricantes
- A placa Arduino visa IoT industrial
- Braço robótico:como é feito?
- Monitor de freqüência cardíaca usando IoT
- Usando IoT para controlar remotamente um braço robótico
- Arduino 3D-Printed Robotic Arm
- Braço robótico controlado por Nunchuk (com Arduino)
- Braço robótico simples e inteligente usando Arduino
- Piscina Azure IoT
- O braço robótico industrial - um boom de fabricação