


Desinfetante de mãos automático
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 19 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Ferramentas e máquinas necessárias
 |
| |||
 |
| |||
|
Aplicativos e serviços online
 |
| |||
| ||||
|
Sobre este projeto
Nos últimos meses, a pandemia COVID-19 espalhou o caos por todo o mundo. Existem inúmeras infecções e, infelizmente, muitas vítimas. Uma das medidas mais importantes sugeridas pela Organização Mundial da Saúde é a lavagem constante das mãos com sabonete ou desinfetante para as mãos. Mas um dos problemas mais significativos é a forma como o fazemos e isso é tocar fisicamente no dispensador que elimina toda a finalidade da ação e até cria um grande risco de infecção. Então, eu , um menino de 14 anos , decidi criar algo usando uma placa Arduino Nano que pudesse combater esse problema, mas eu também queria que fosse barato e pudesse ser conectado a muitos dispensadores diferentes de forma fácil, rápida e eficaz! E foi exatamente isso que eu fiz, um acessório que pode ser acoplado à maioria dos dispensadores de desinfetante para as mãos / sabonete e virá-los completamente viva-voz e automático
Em primeiro lugar, assista a este vídeo para ver o dispositivo em ação e também para entender como ele funciona e como foi feito!
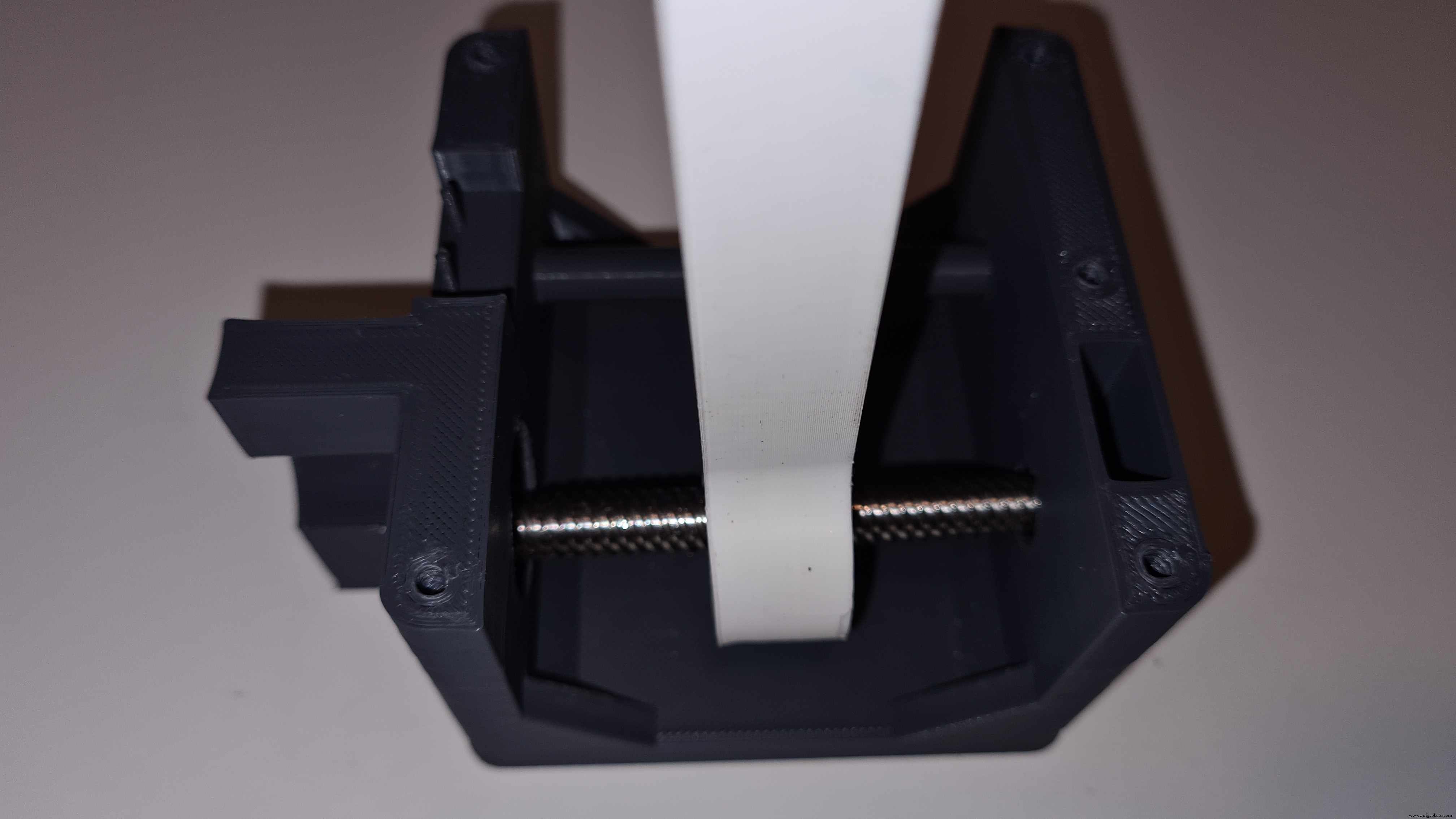
Etapa 1:compreender o mecanismo


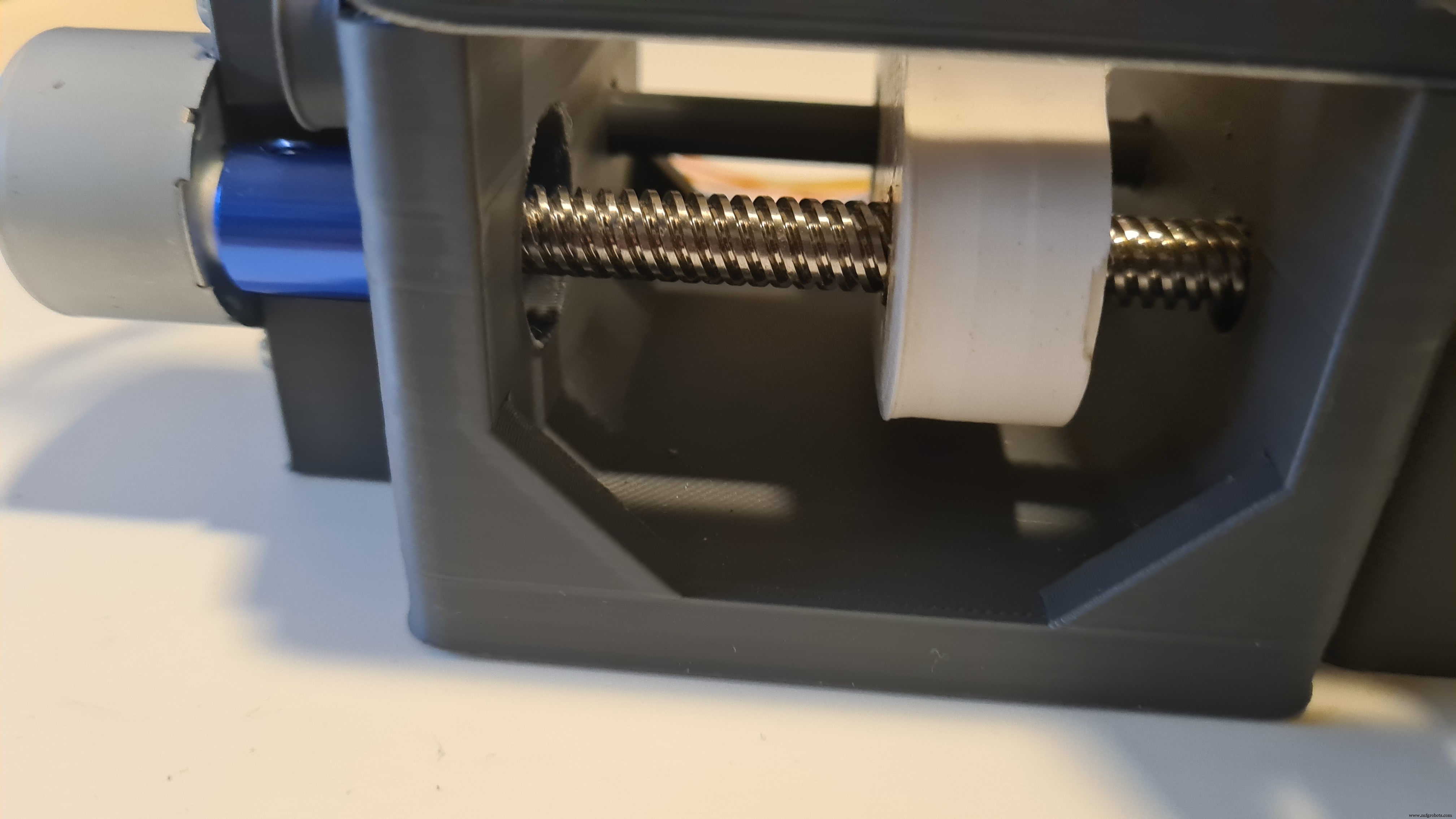
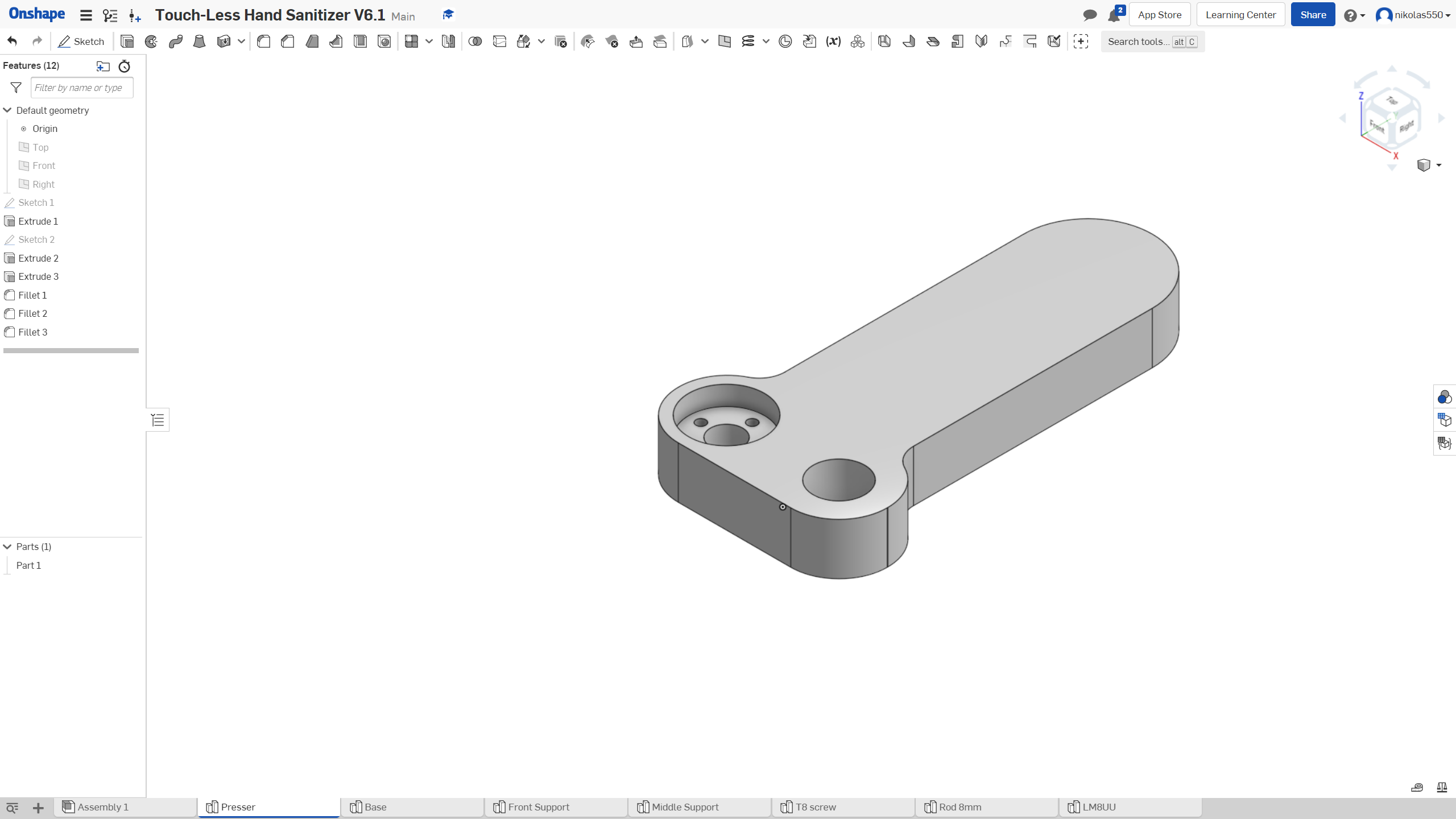
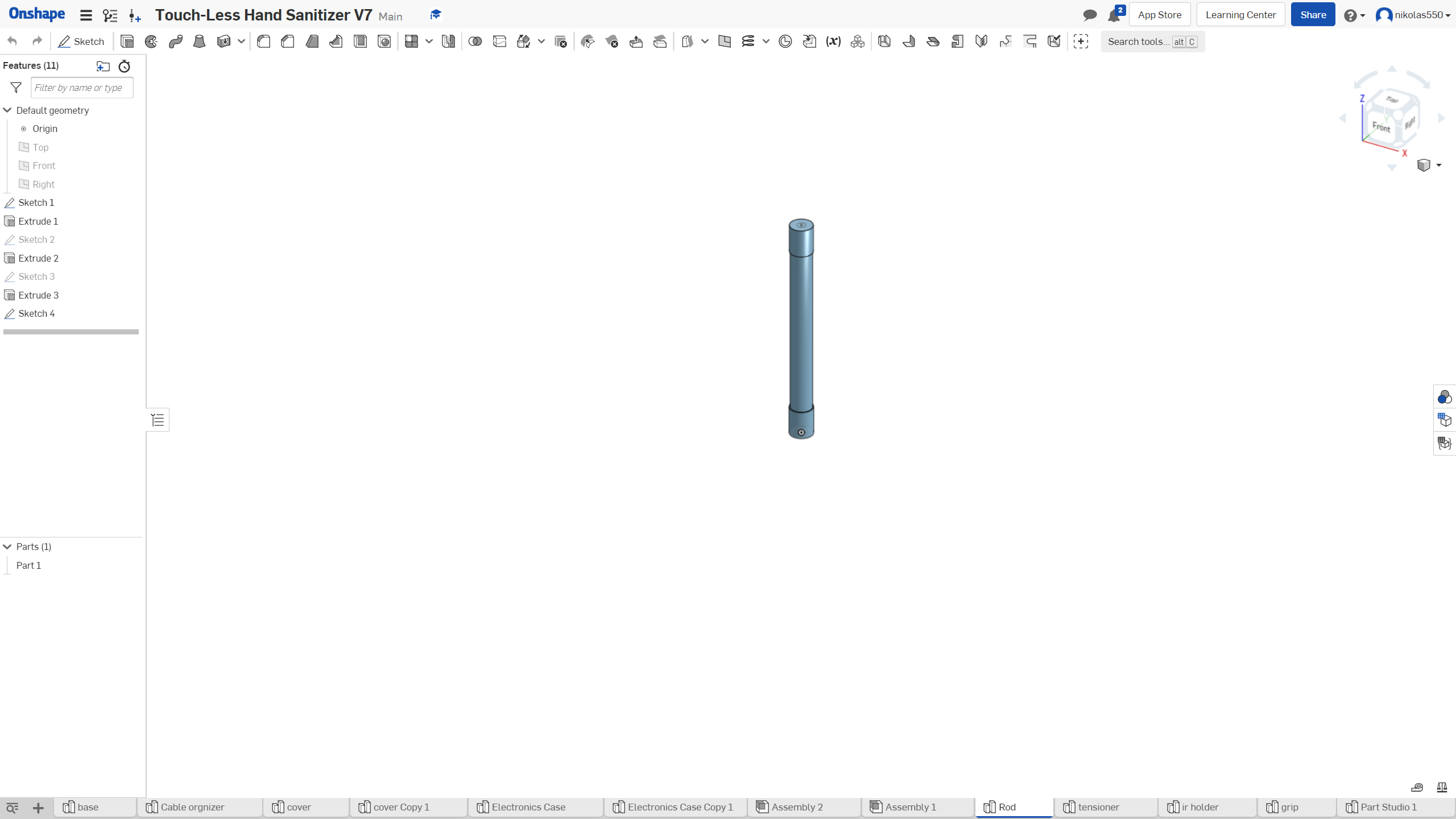
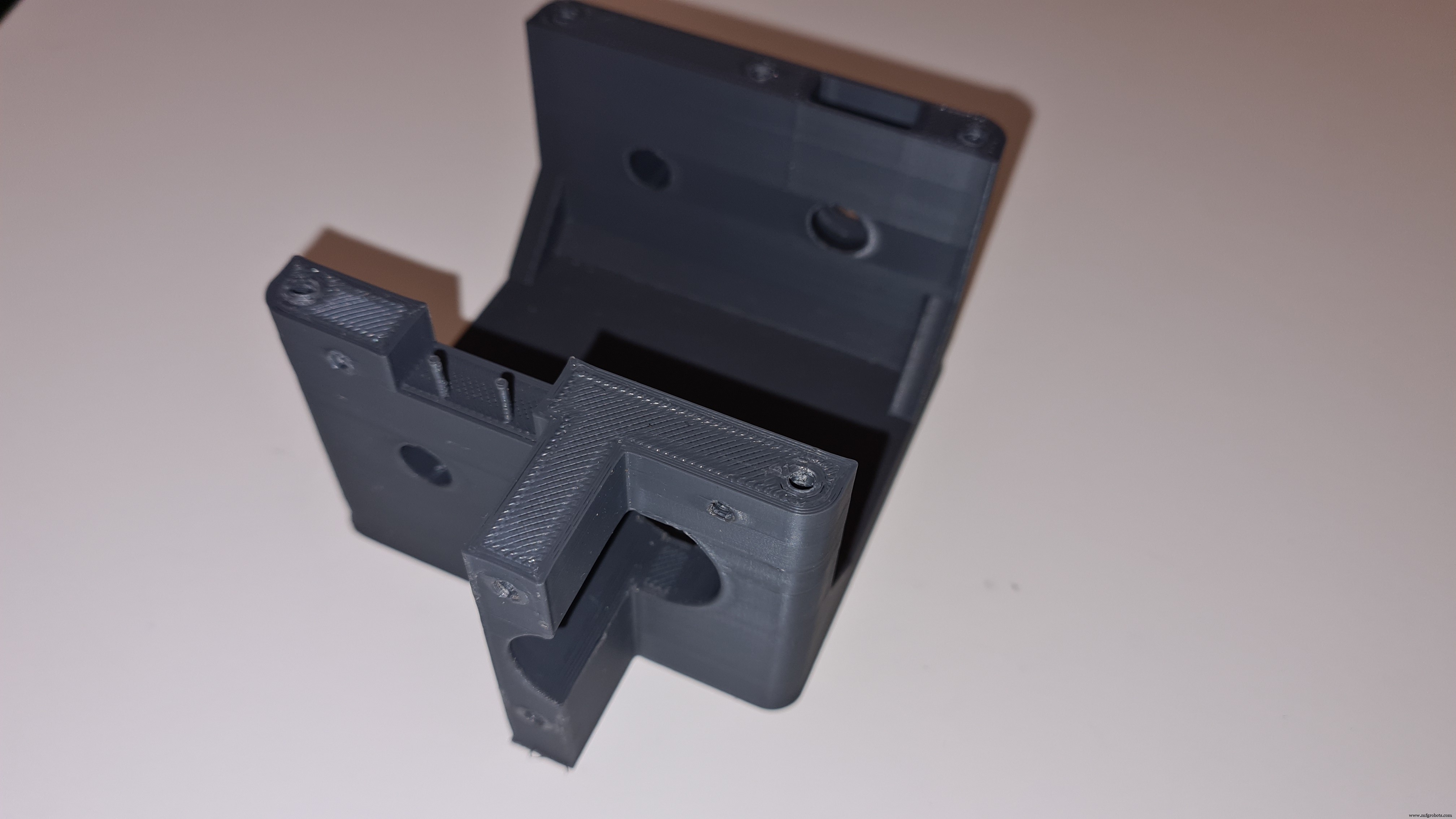
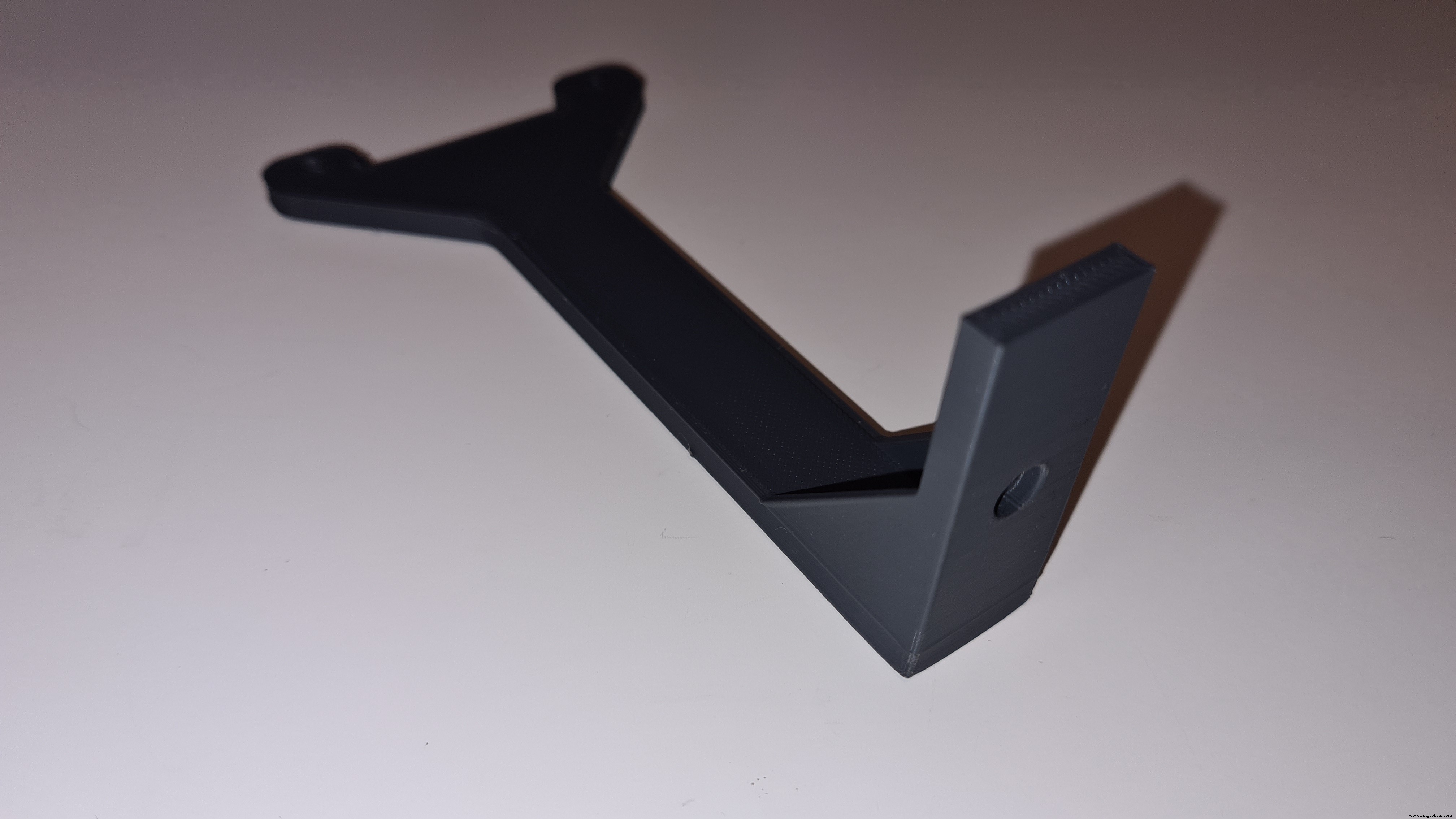
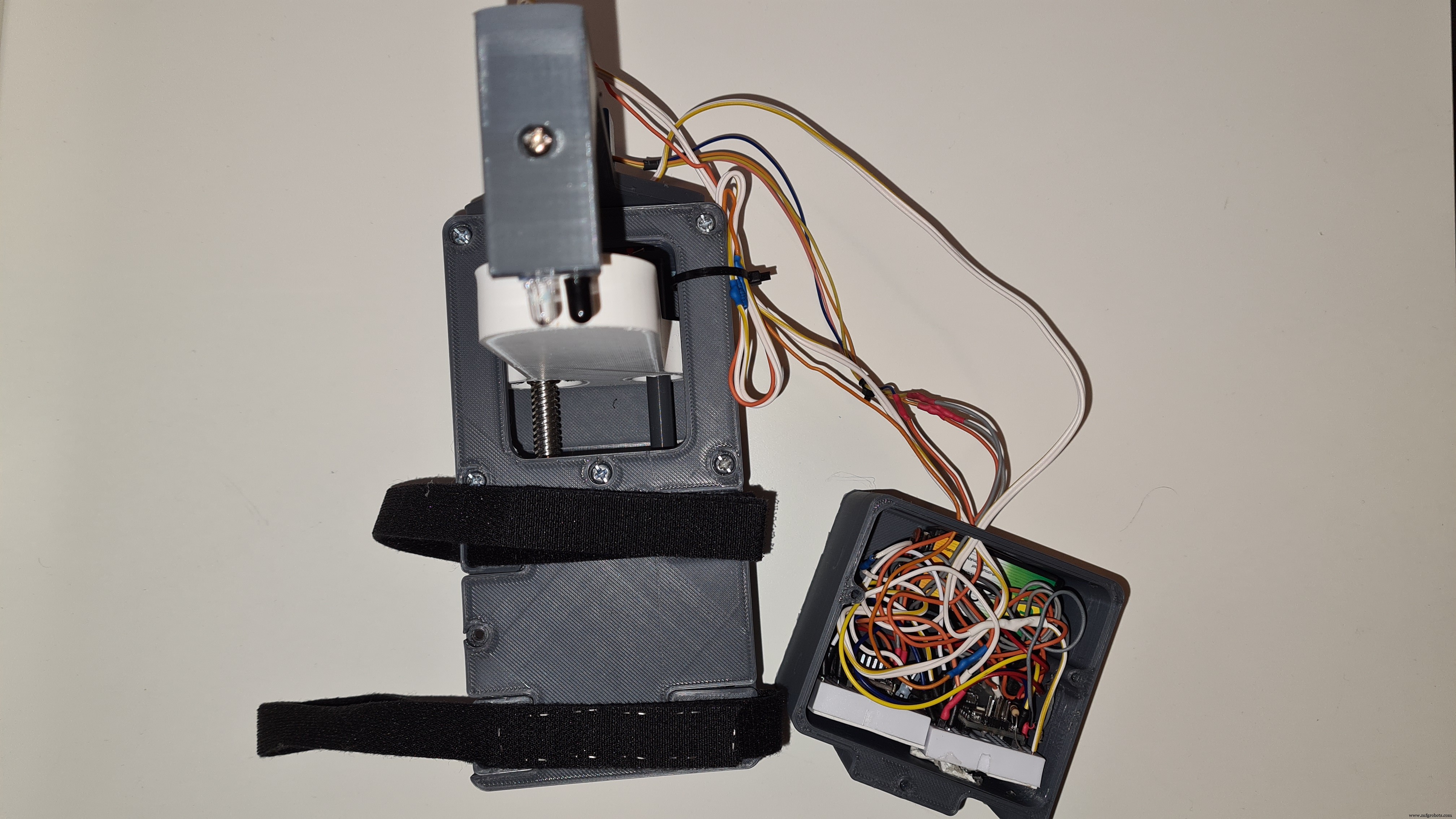
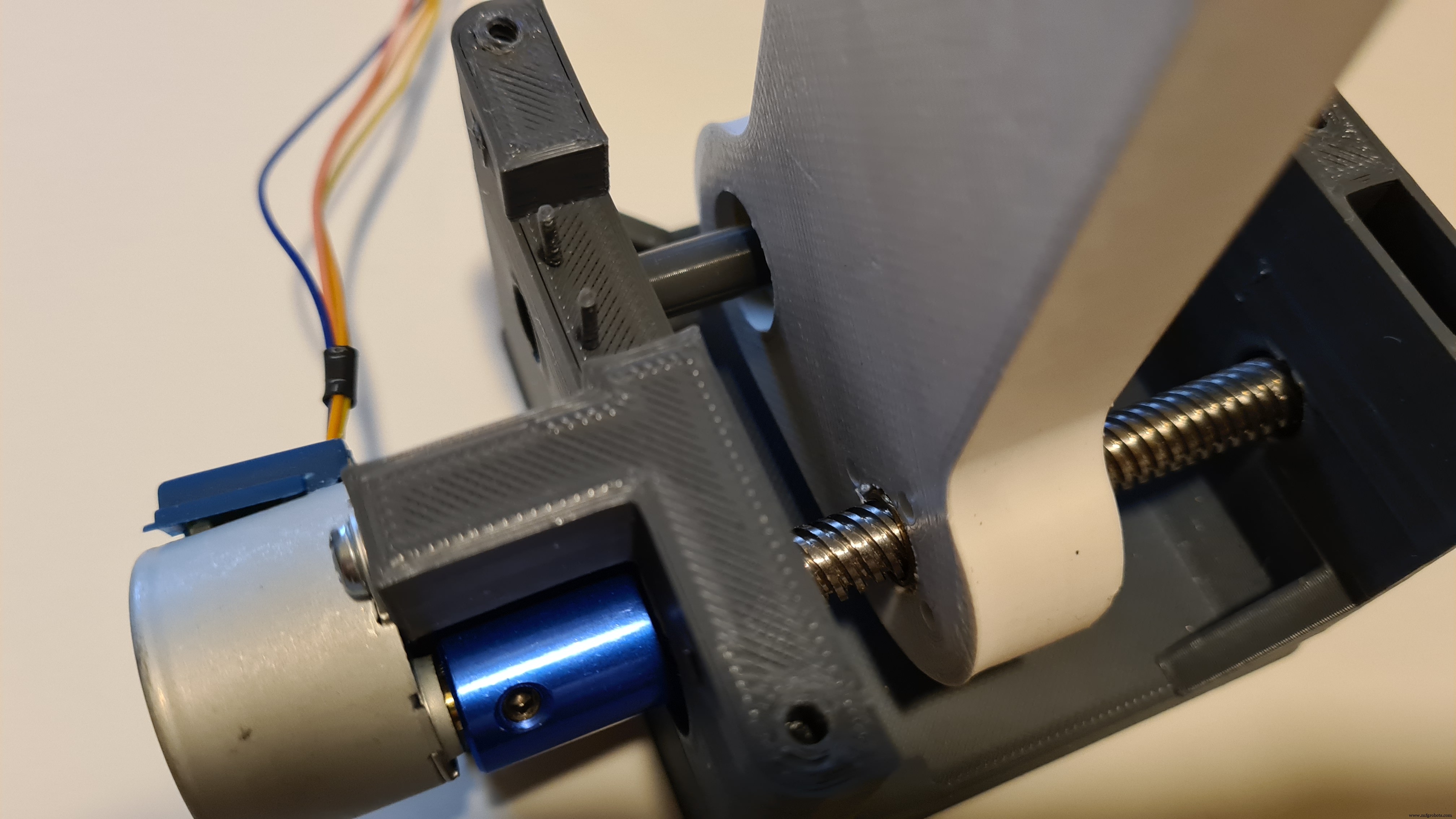
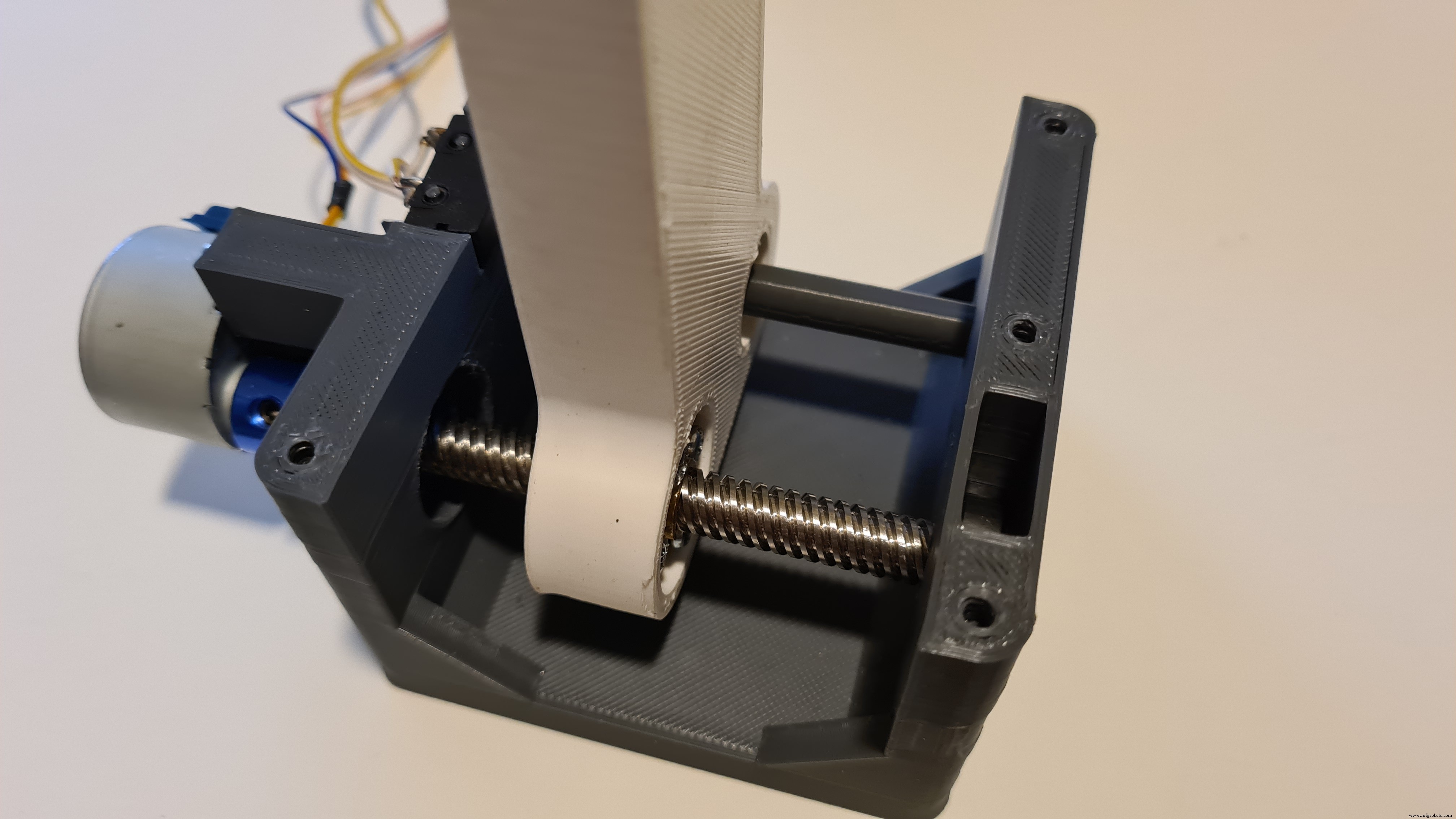
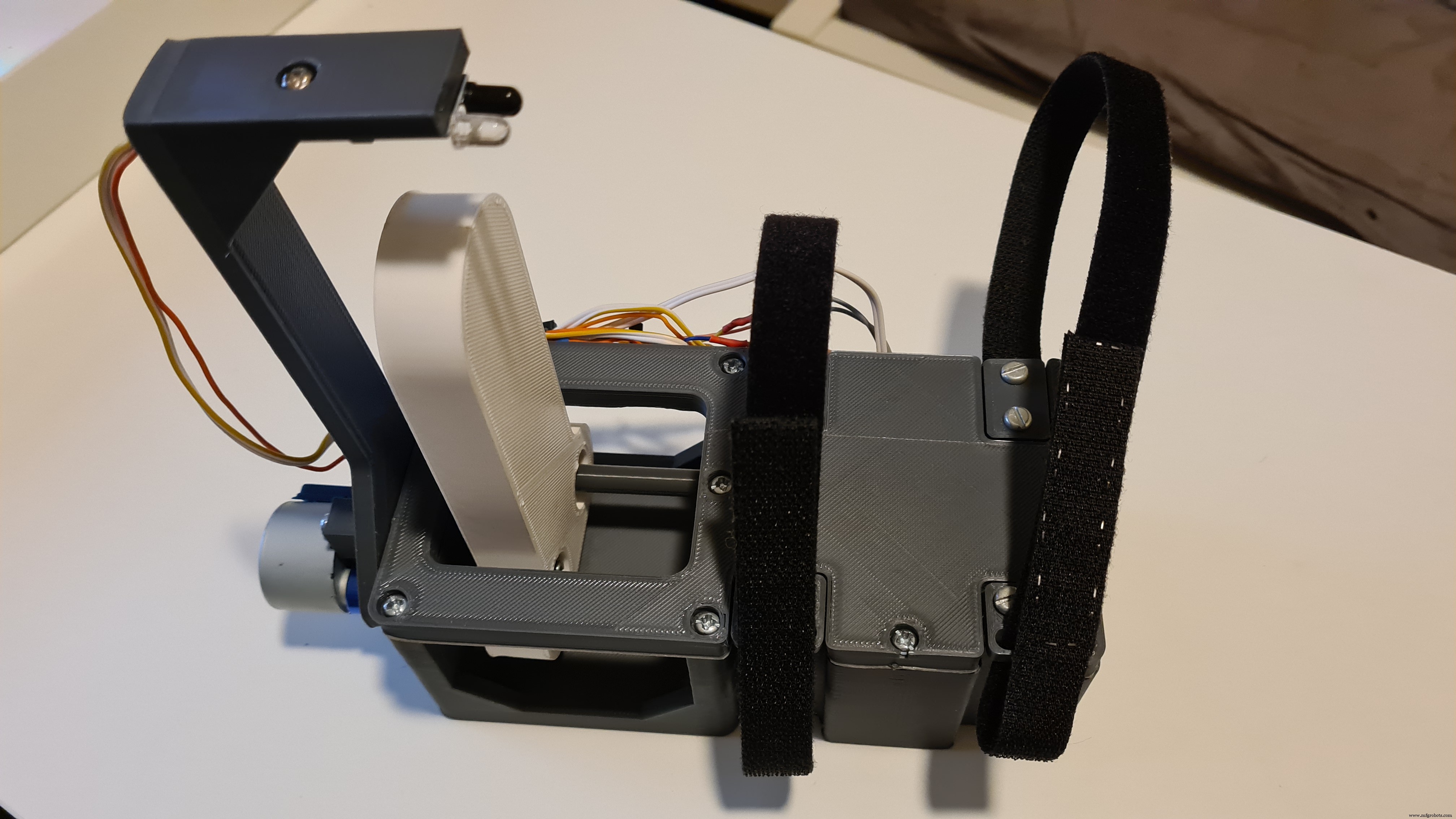
Basicamente, um motor de passo é conectado com um acoplador a um parafuso. Em seguida, o prensador impresso em 3D é conectado de um lado com o parafuso usando uma porca e do outro lado é suportado por uma haste impressa em 3D. A haste não permite que a força rotacional do parafuso gire o pressionador e, em vez disso, o pressionador se move linearmente . Dessa forma, podemos comandar o stepper para se mover em qualquer direção (para frente e para trás), a qualquer velocidade e por quantos passos quisermos.
Etapa 2:entender como o dispositivo funciona


O conceito é que quando o Sensor de Obstáculo IR, que está conectado ao Suporte IR impresso em 3D, é ativado, bastando colocar a mão alguns centímetros abaixo dele, o pressionador desce uma distância definida, (pressionando o dispensador) aguarda 2 segundos e, em seguida, retorna à posição inicial simplesmente subindo até que o interruptor de fim de curso seja ativado. Da mesma forma, quando o dispositivo é ligado pela primeira vez, o pressionador sobe até o interruptor ser ativado e então para aí, como uma espécie de autocalibração para que o pressionador esteja pronto para uso.


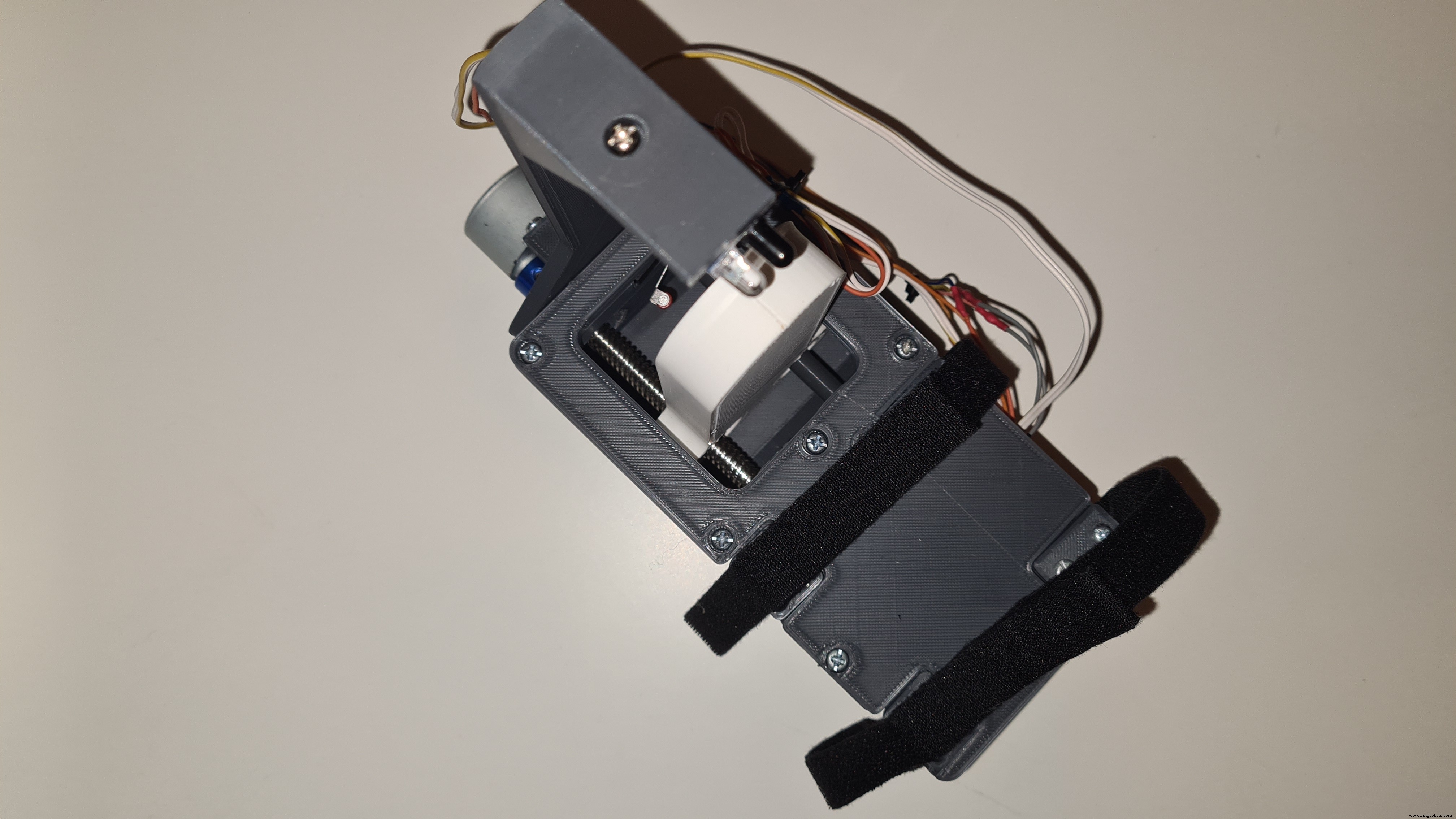
Em seguida, usando os Velcros, você embrulha o Desinfetante para as Mãos de sua escolha e aperta tanto quanto possível.
Agora o dispensador automático de desinfetante para as mãos está funcional !!
Etapa 3:reúna os componentes necessários
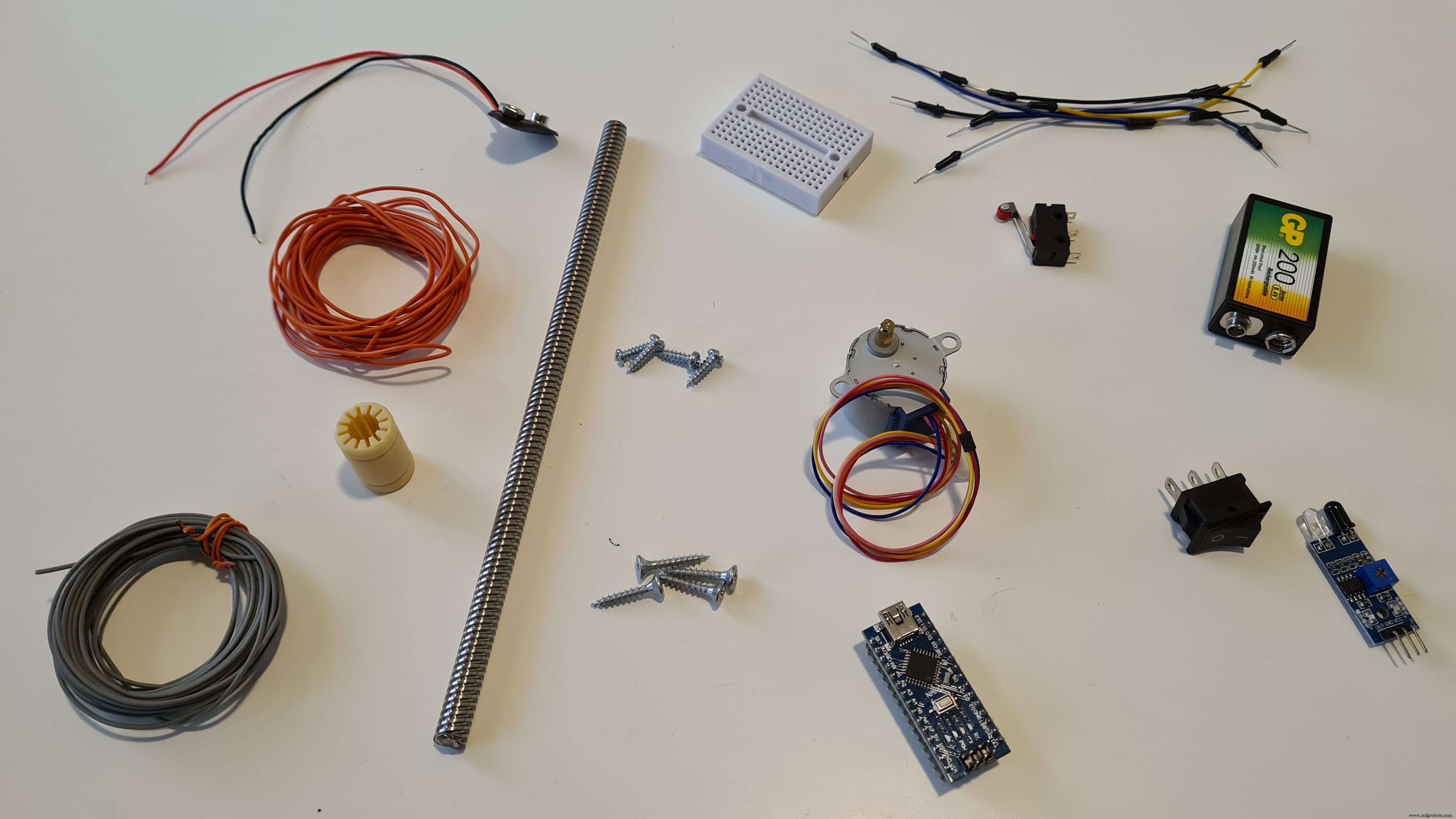
Todos os links dos componentes necessários estão localizados na seção "Coisas".
Etapa 4:projetar peças personalizadas
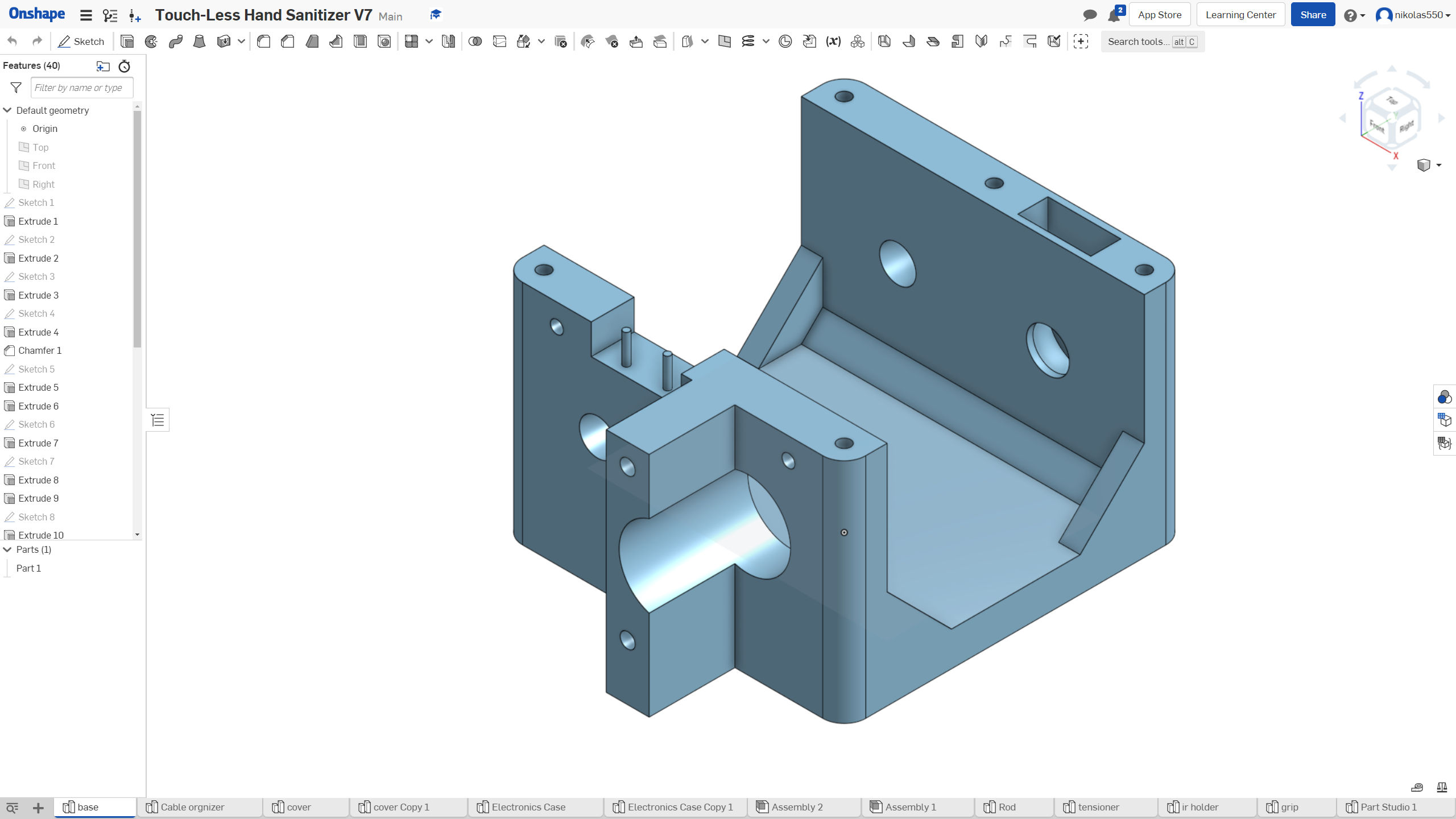
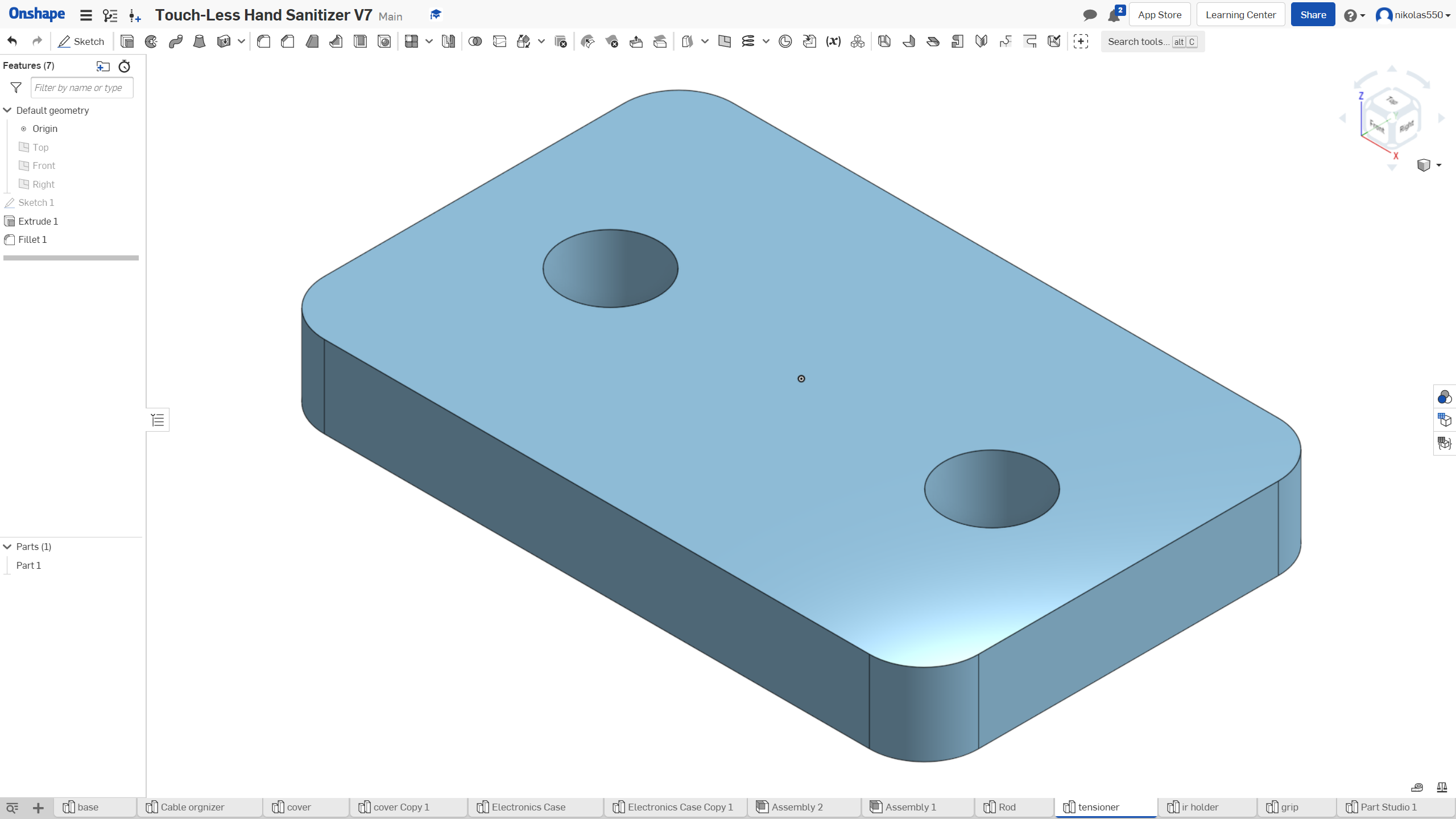
Todas as peças impressas em 3D foram projetadas por mim no Onshape, mas você não precisa se preocupar com o projeto 3D porque forneci todos os arquivos .stl na seção "Anexos".
Etapa 5:impressão em 3D de peças de plástico personalizadas
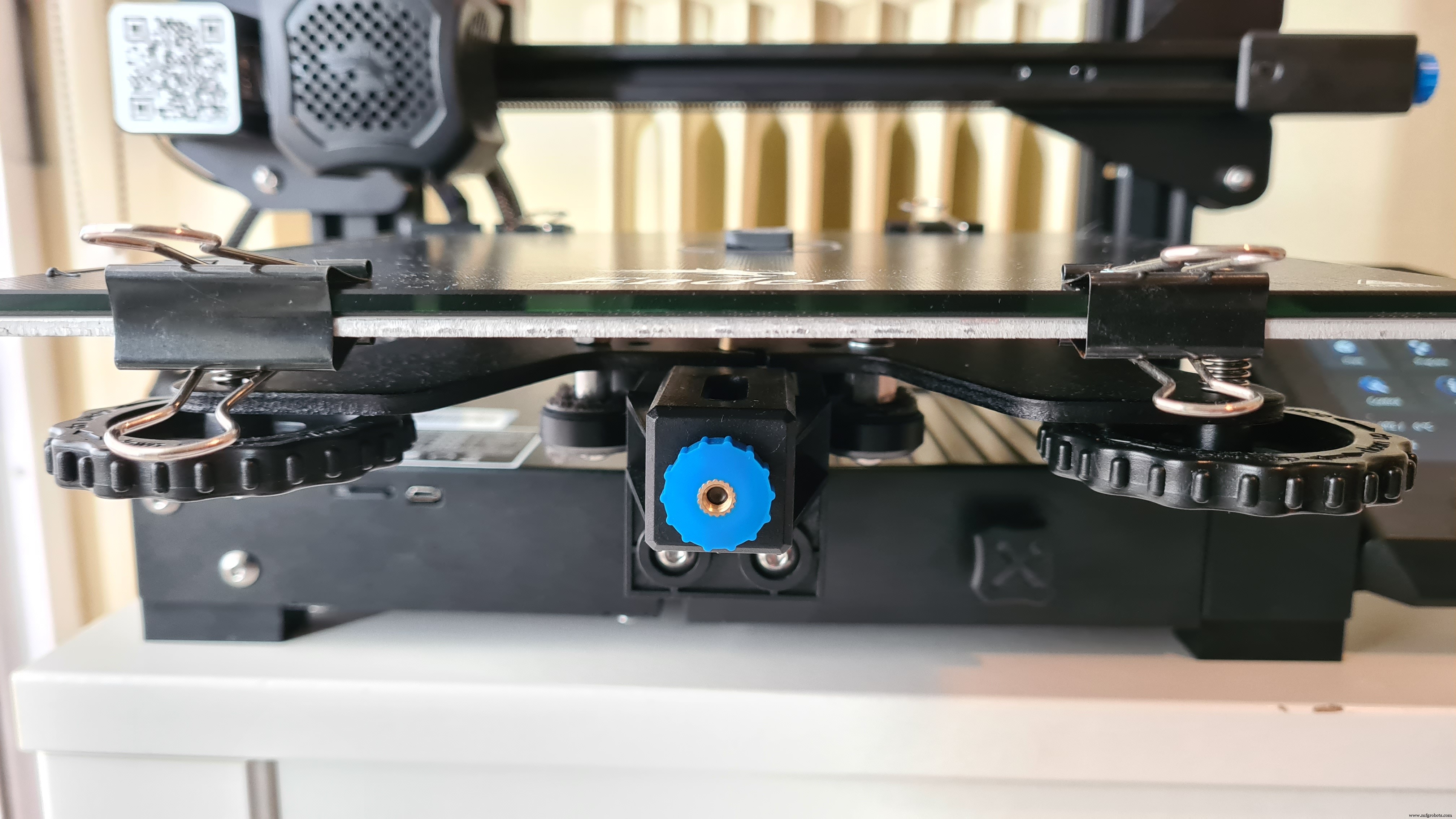




Eu imprimi as peças em 3D no meu Creality3D Ender 3 V2 em PLA cinza e branco em uma camada de 0,2 mm de altura e 20% de preenchimento. Se você não tiver acesso a uma impressora 3D, pode tentar usar papelão ou madeira.
Etapa 6:modificando o stepper

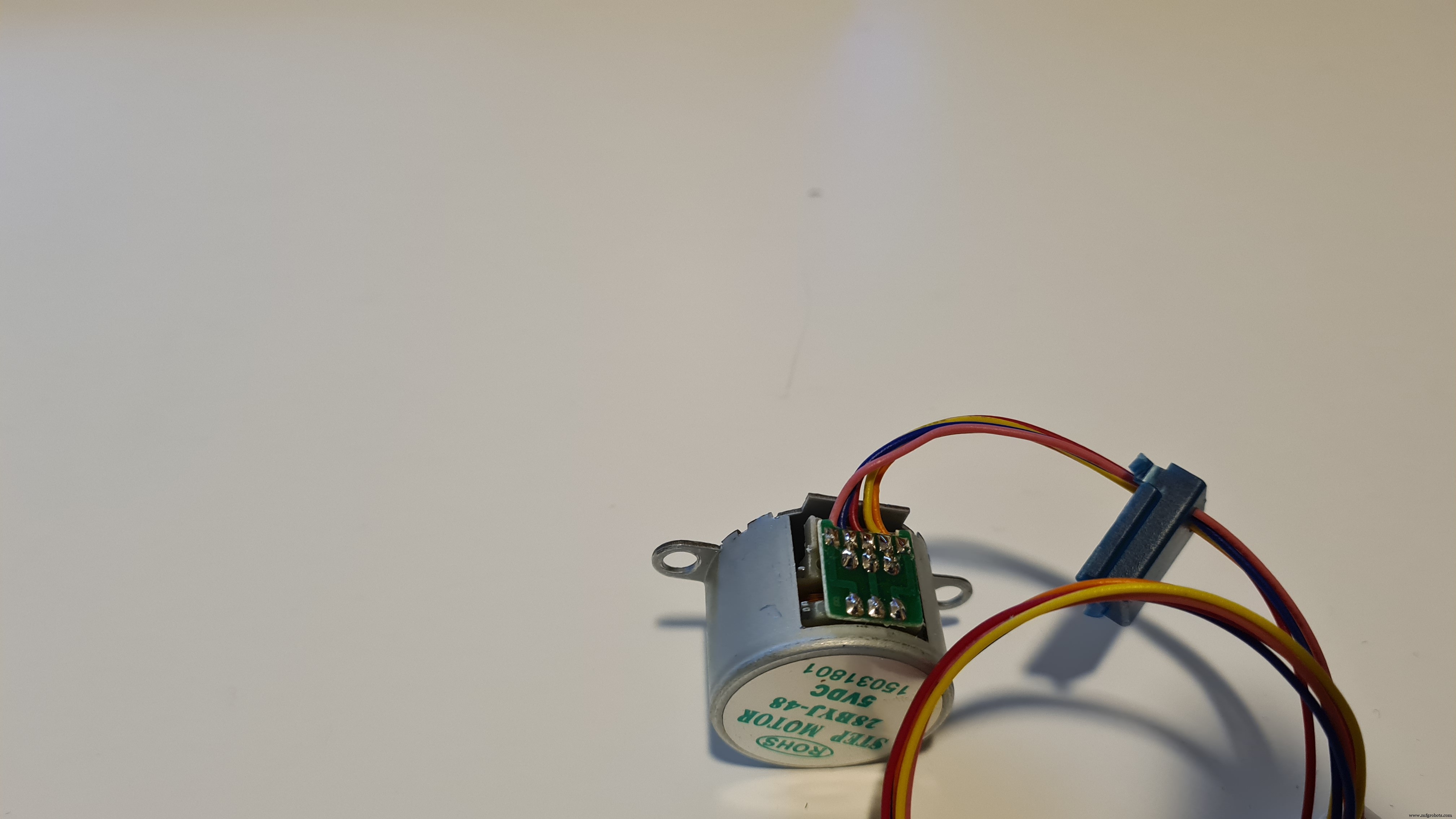
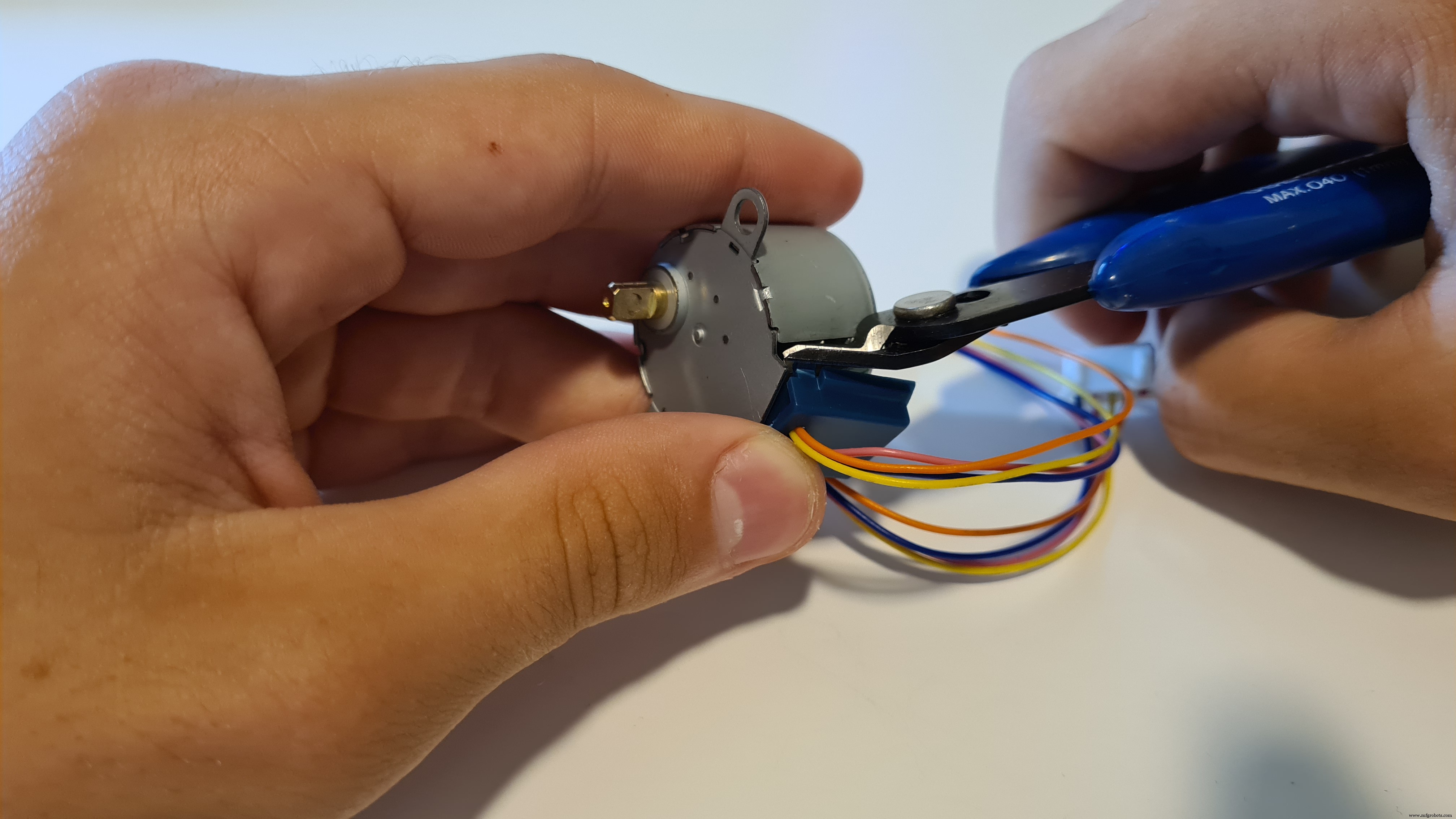
O motor de passo 28BYJ-48 é um motor de passo pequeno e muito barato. É um motor de passo unipolar e tem um torque de cerca de 300 g / cm que funciona com o nosso projeto, mas quero que seja mais forte para melhores resultados. Podemos aumentar o torque para 800+ g / cm por conversão para um bipolar motor com um mod simples e fácil!
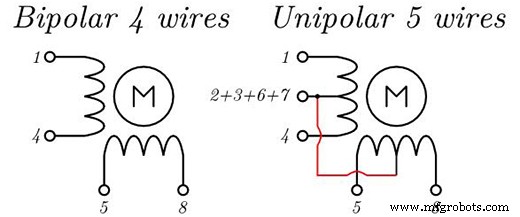
Os steppers bipolares têm bobinas maiores e, como resultado, muito mais torque .

Em primeiro lugar, você deseja remover a tampa azul com uma chave de fenda.
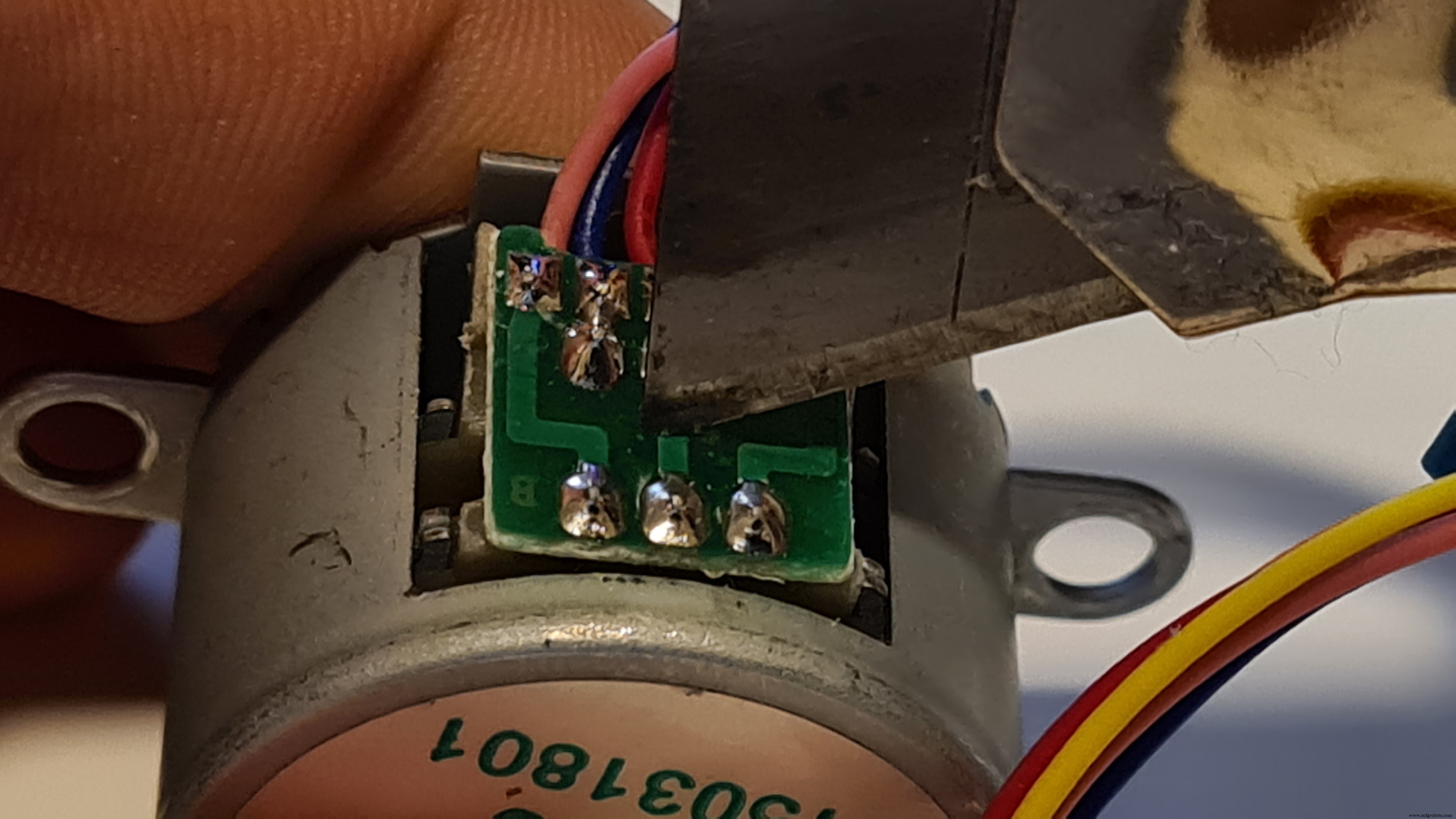
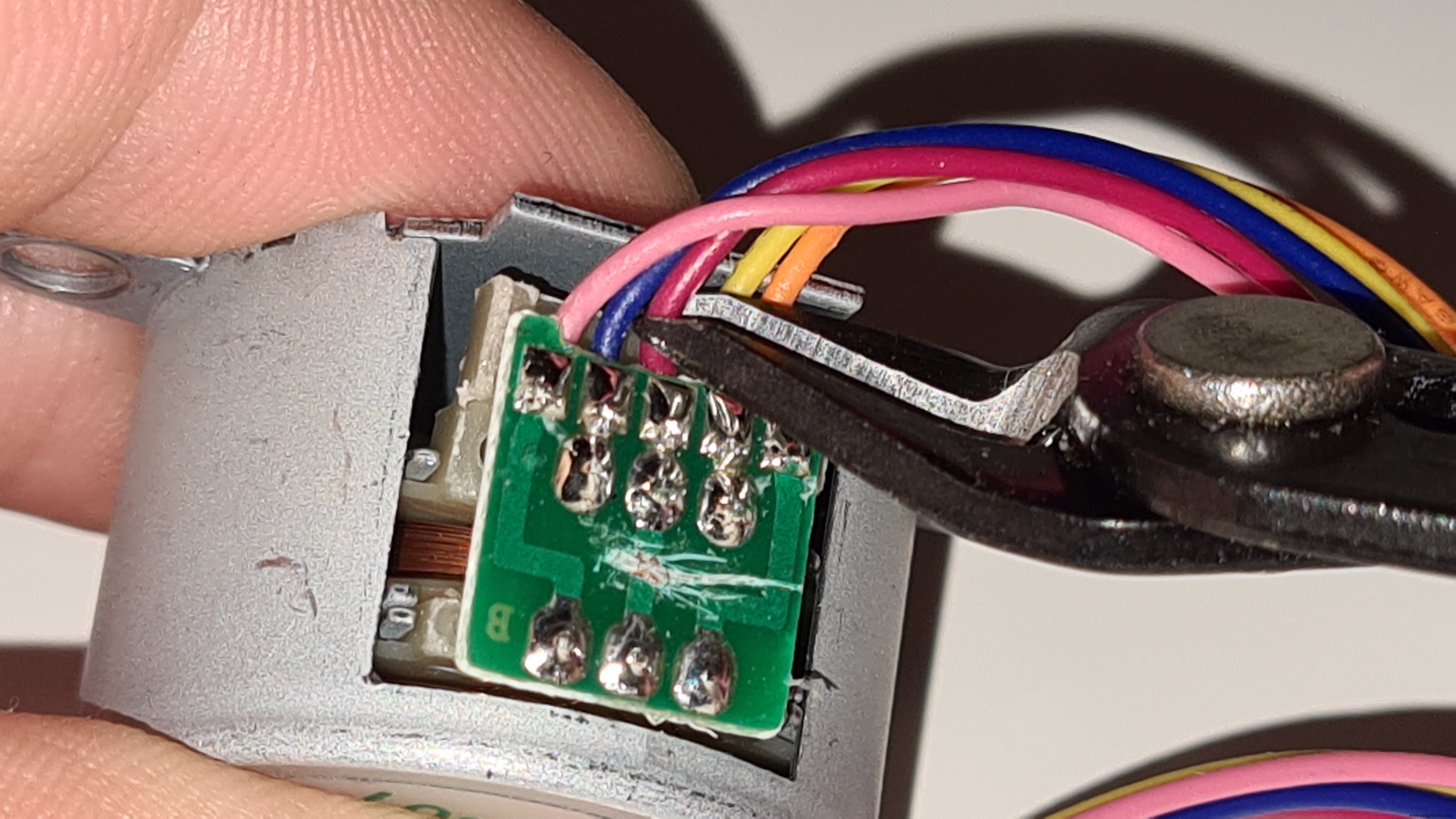
Uma vez removido, você deseja cortar totalmente o traço do meio que sobe até o fio vermelho usando uma faca.
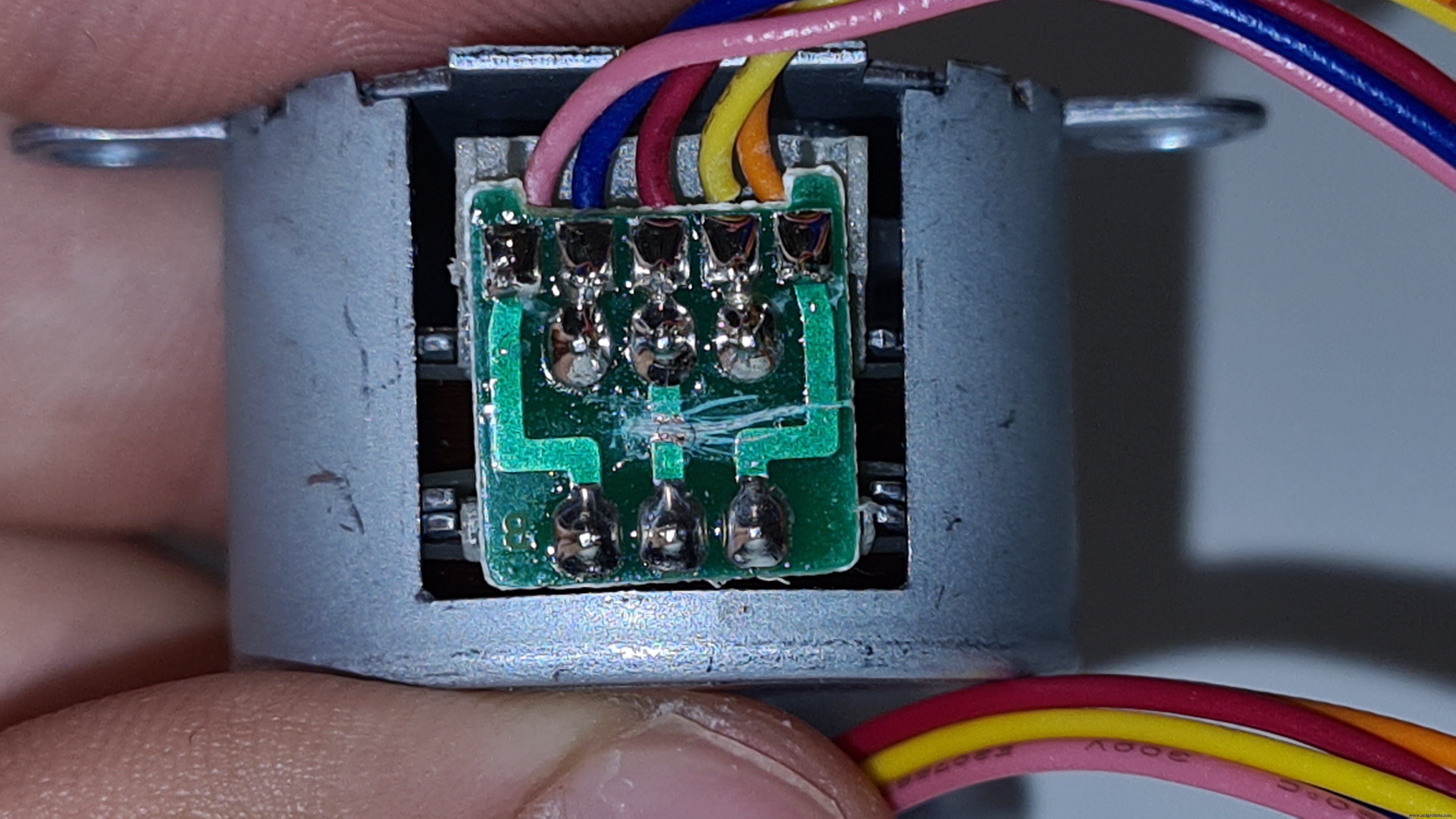
Você quer ter certeza de que não conectar em tudo mais.
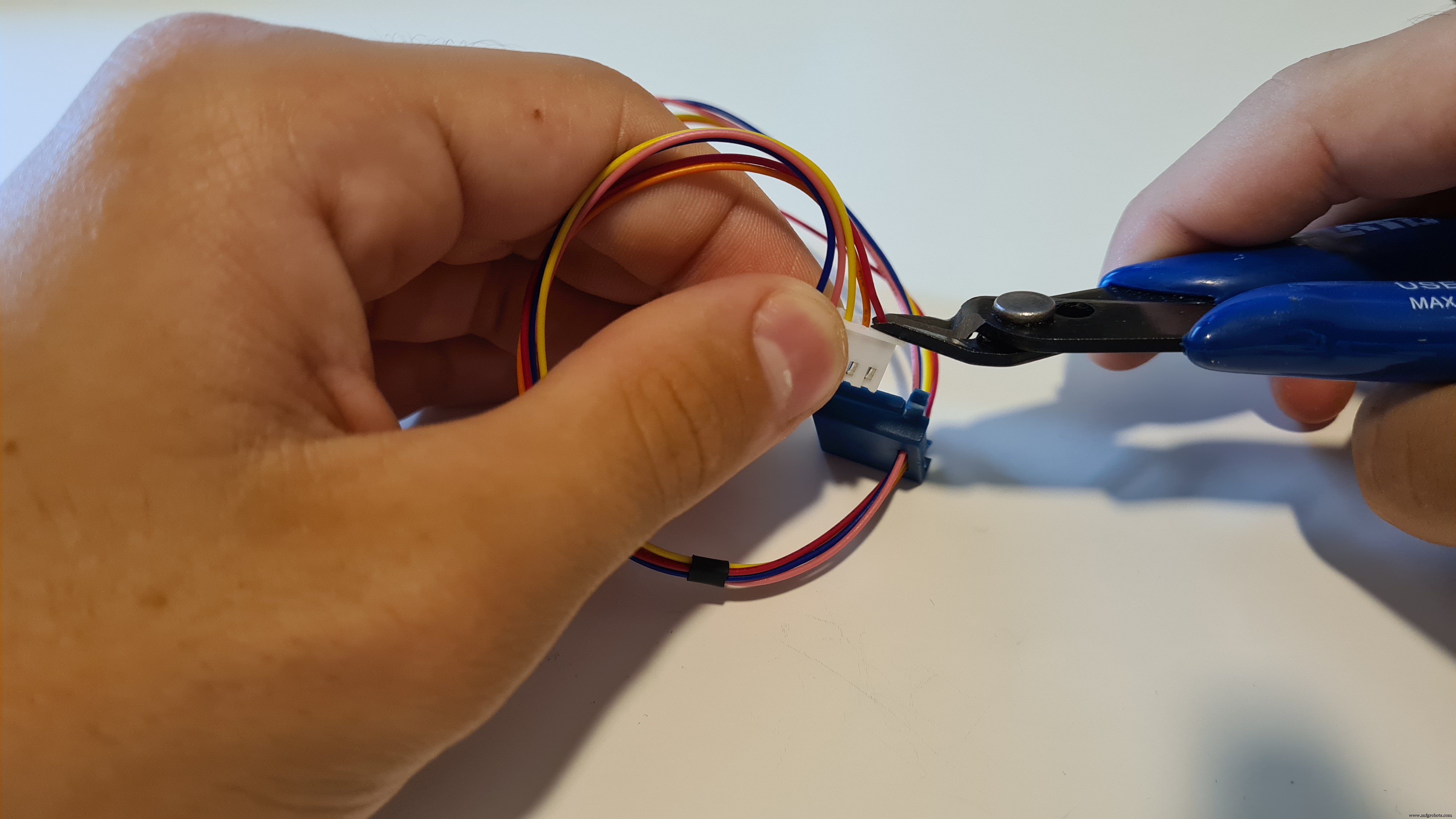
Agora você pode cortar o fio vermelho de ambos os lados.
Você pode recolocar a tampa azul agora. Eu precisei cortar 2 de seus suportes para poder colocá-lo de volta.
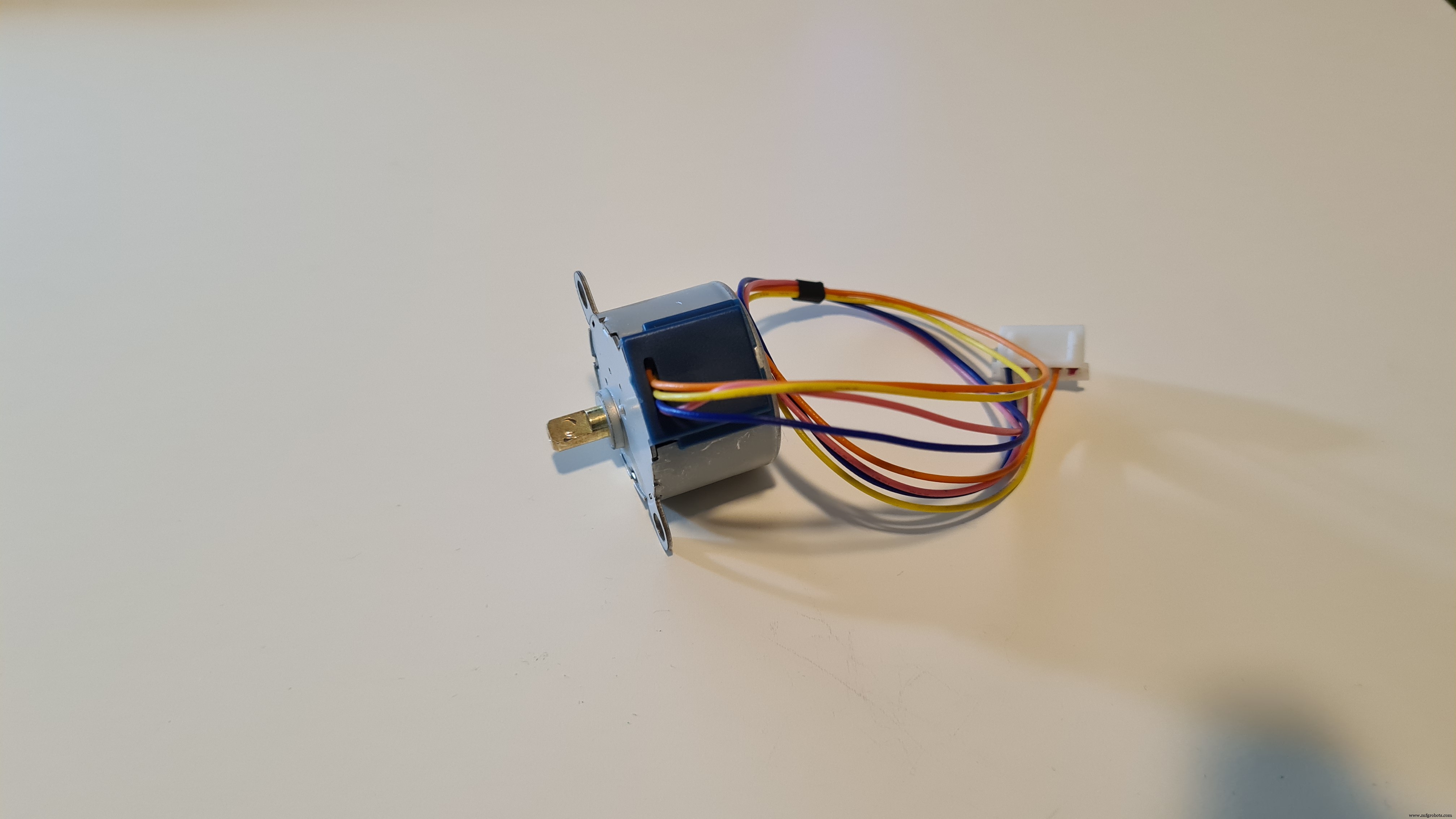
Agora você tem seu próprio stepper bipolar 28BYJ-48. Possui aproximadamente 2,5 vezes o torque inicial. No entanto, agora você precisará obter um driver de passo bipolar, como o DRV8825 que estou usando. A fonte de tensão mínima para o driver é de 8,4 V e nosso motor é de 5 V. Mas não se preocupe, a versão bipolar do motor pode lidar facilmente com essa tensão!
Etapa 7:gravatas de velcro faça você mesmo x2

É hora de fazer as fitas de velcro que irão prender o acessório ao dispensador. Se você já possui algumas braçadeiras de velcro, sinta-se à vontade para usá-las.

Você pode torná-los tão longos ou tão curtos quanto quiser, mas eu sugiro cortar uma parte em 30cm - 40cm e a outra em 4cm - 7cm.

Agora você deseja grampear as duas partes juntas. Certifique-se de que os lados que serão grampeados sejam ásperos ou macios.
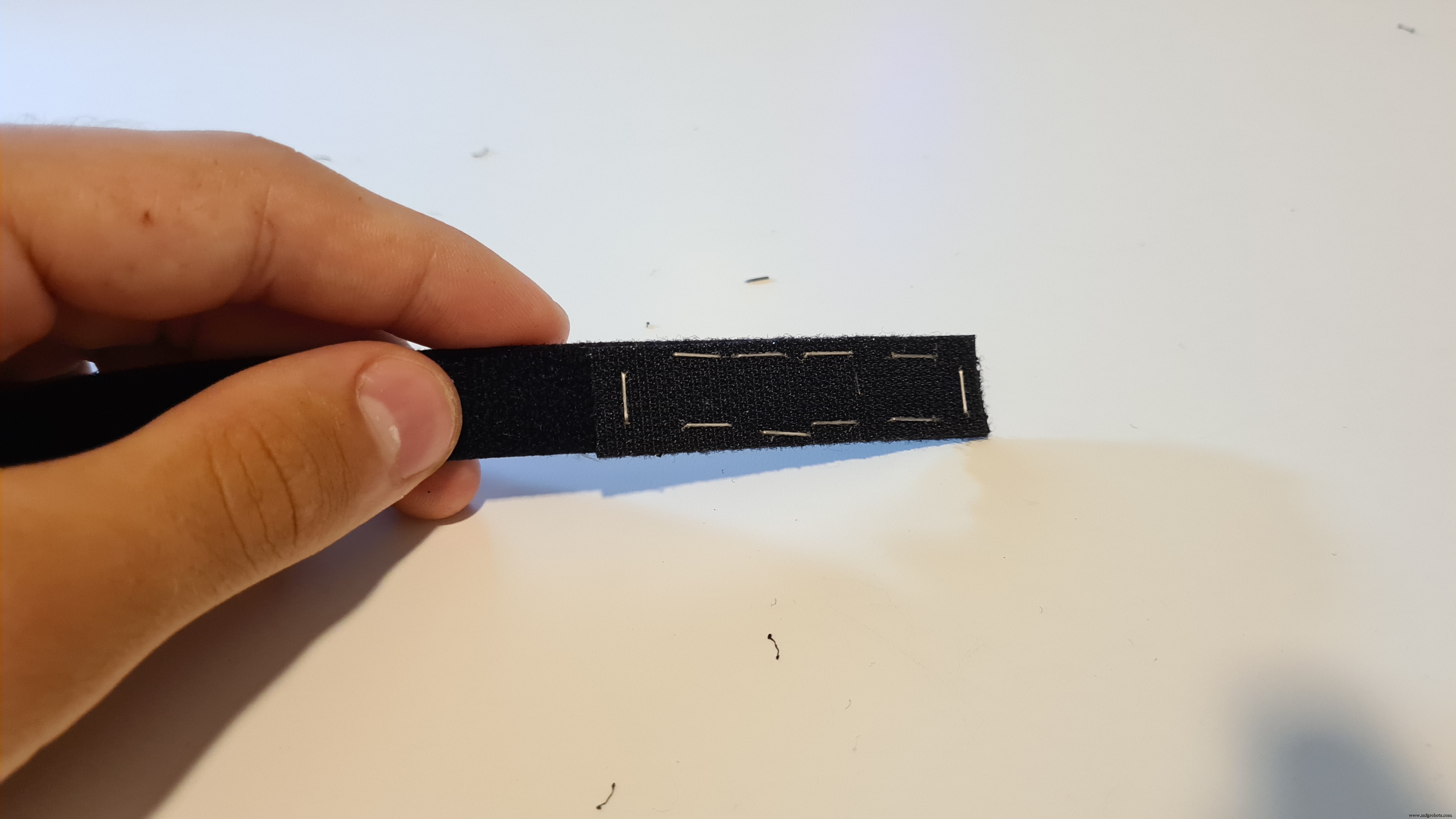
Agora sua gravata de velcro está pronta para usar!


Você precisará de dois deles.
Etapa 8:circuito
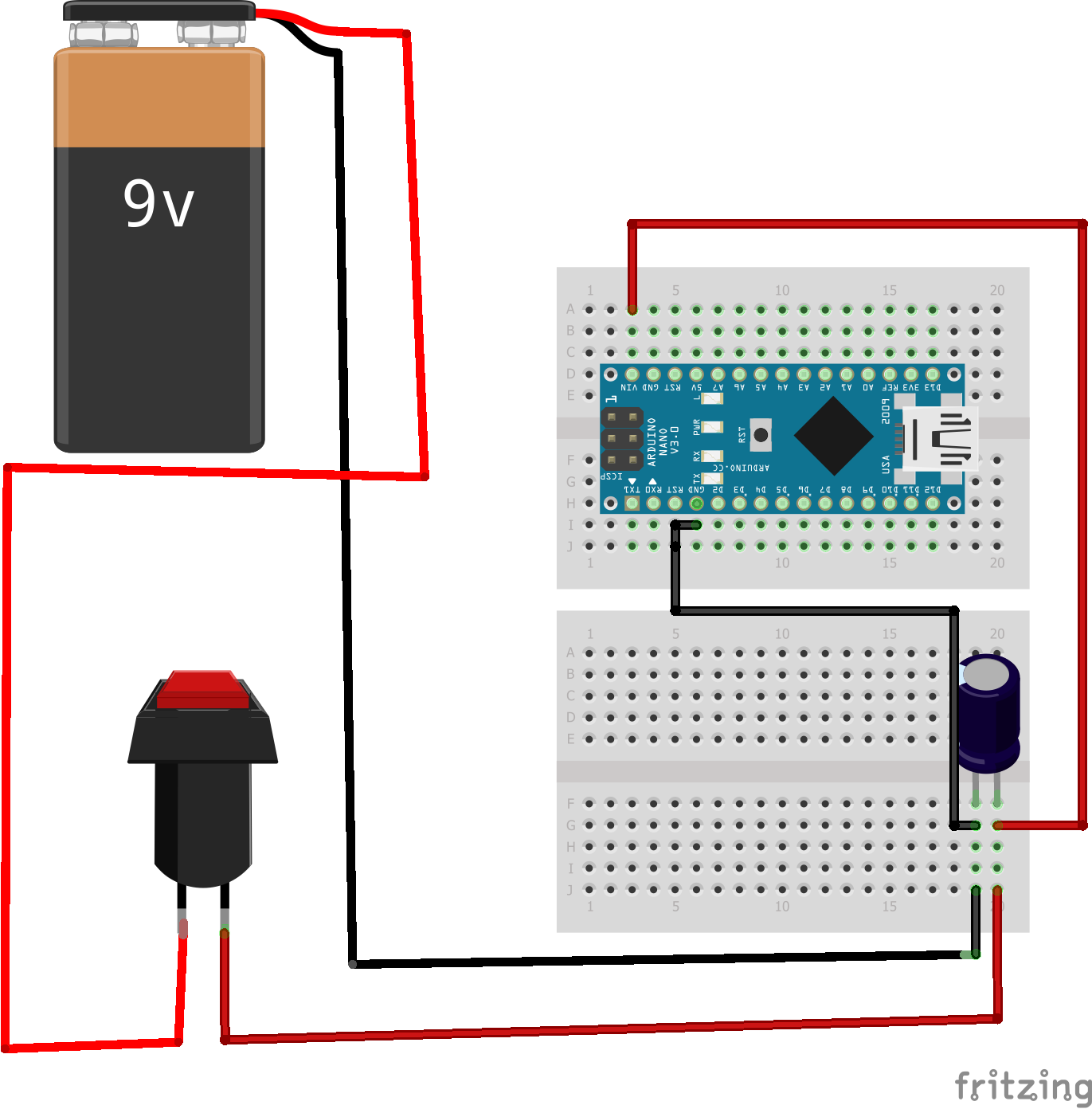
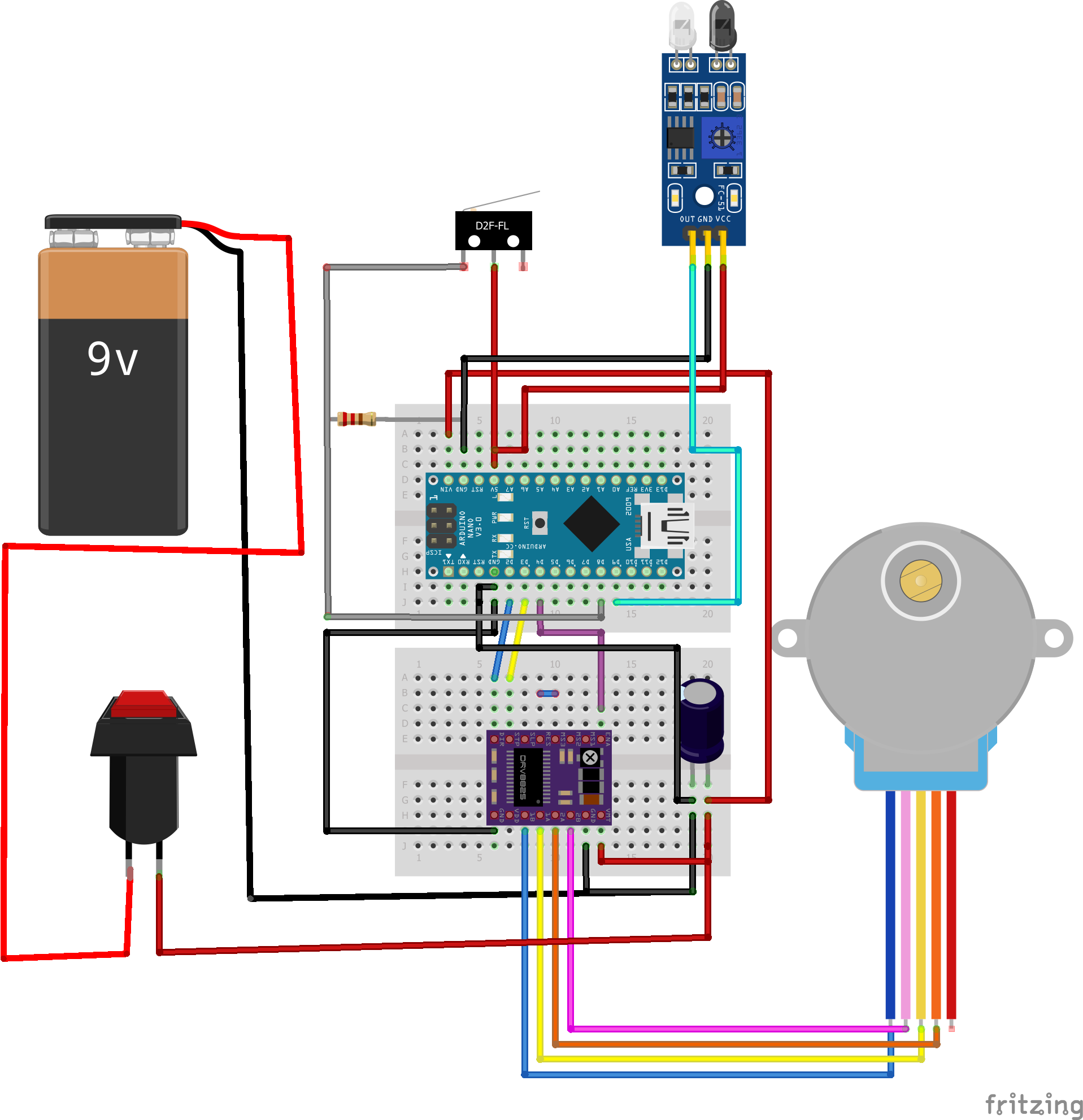
É hora de criar o circuito eletrônico! Para começar, conecte o aterramento da bateria de 9 V ao aterramento do Arduino com um capacitor eletrolítico de 100μF no meio (lembre-se que o lado do capacitor com a linha branca é o aterramento / cátodo). Conecte o 9V a uma chave liga-desliga genérica e então a Vin no ânodo do capacitor. Estou usando duas protoplacas de ensaio porque elas se encaixam bem dentro do gabinete, use qualquer placa de ensaio que você quiser, mas leve em consideração o espaço limitado.
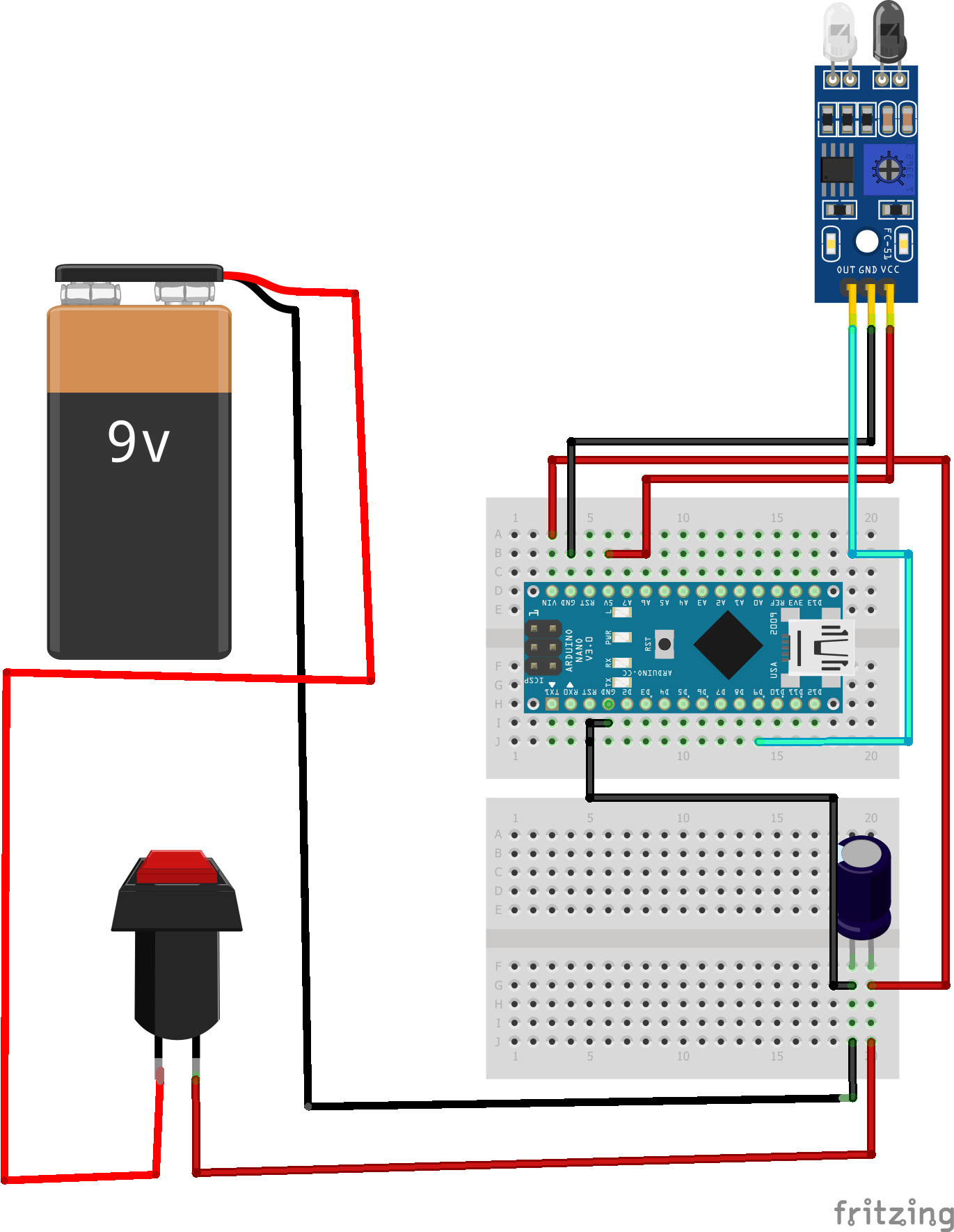
Conecte o sensor de obstáculo IV VCC a 5V, aterramento ao aterramento e, finalmente, OUT ao pino digital 9.

Agora vamos conectar o interruptor de fim de curso. Conecte a perna comum a 5 V e a normalmente aberta ao pino digital 8 e ao aterramento por meio de um resistor de 1kΩ.
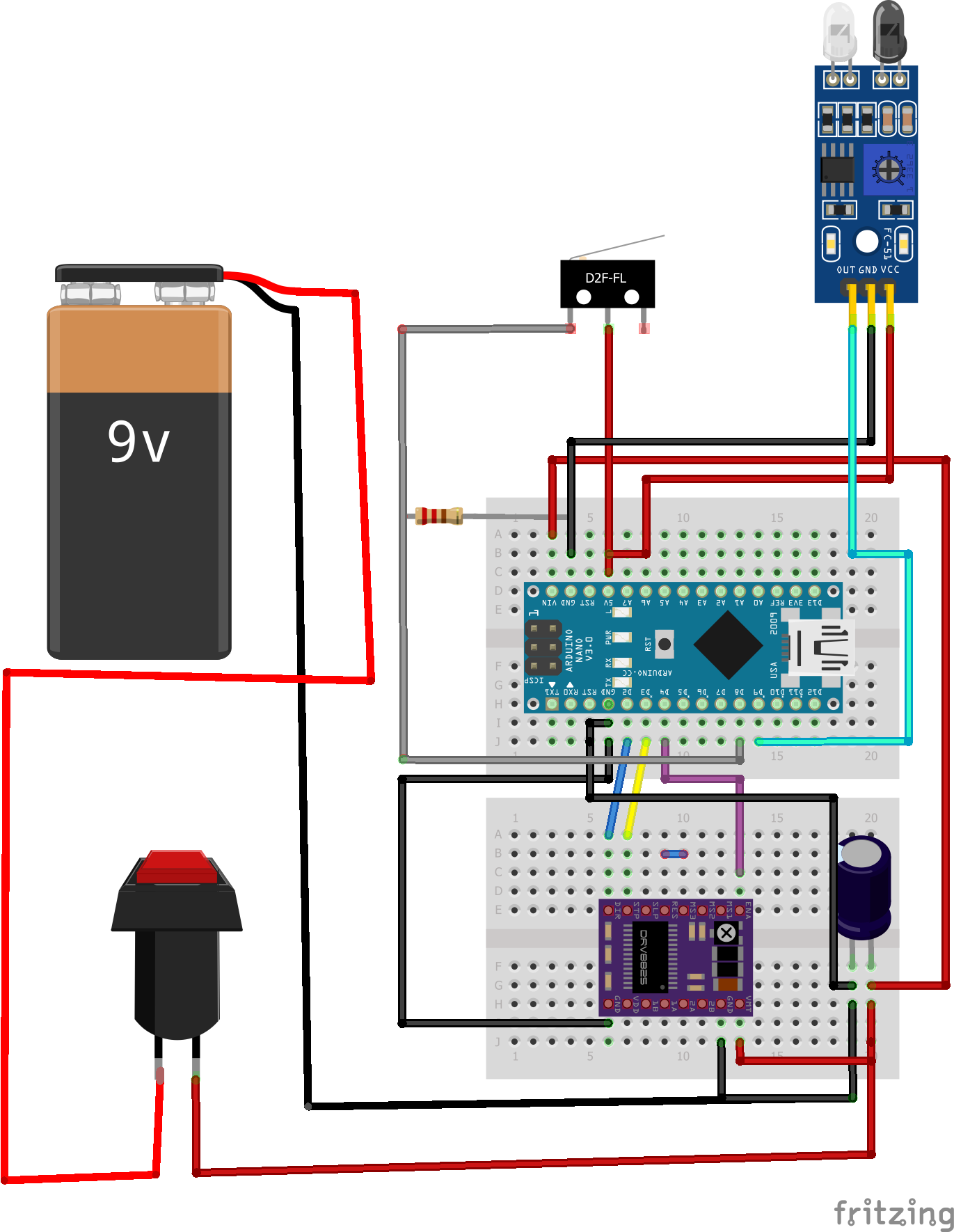
Adicione o driver do motor bipolar DRV8825 à placa de ensaio. Conecte o Vmot ao Vin do Arduino. Conecte os dois Terrenos ao Terra. Conecte o pino Dir ao pino Digital 2, o pino Step ao pino Digital 3, o pino Enable ao pino Digital 4. Conecte o pino Reset e Sleep um ao outro.
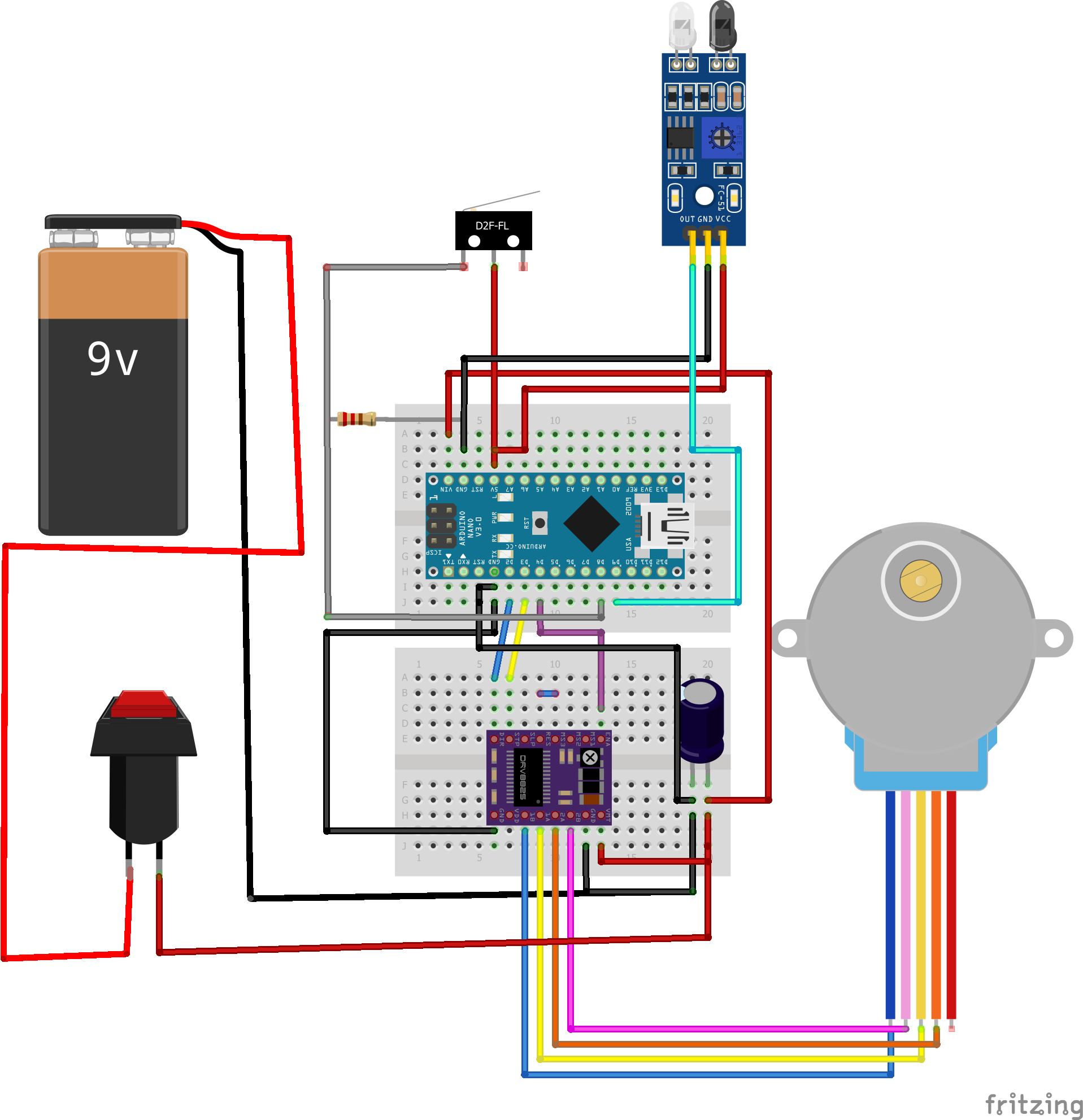
Por último, conecte o cabo azul do 28BYJ-48 ao A2, o cabo amarelo ao A1, o cabo laranja ao B1 e o cabo rosa ao B2.
A eletrônica está finalmente conectada!
Etapa 9:Programação
const int dirPin =2; Definimos o pino Dir do driver como o pino digital 2.
const int stepPin =3; Definimos o pino de etapa do driver como o pino digital 3.
const int enablePin =4; Definimos o pino de habilitação do driver como o pino digital 4.
const int stepsPerRevolution =6000; Definimos o número de passos por revolução como 6000, uma rotação de 360 graus significa 2048 passos.
int endStop =8; Definimos o pino de entrada da chave endStop como o pino digital 8.
int irSensor =9; Definimos o pino de entrada do sensor de obstáculo IR como o pino digital 9.
void setup ()
{
pinMode (endStop, INPUT);
pinMode (irSensor, INPUT); Na configuração, declaramos os pinos endStop e irSensor como entradas.
pinMode (stepPin, OUTPUT);
pinMode (dirPin, OUTPUT);
pinMode (enablePin, OUTPUT); Declaramos stepPin, dirPin e enablePin como saídas.
digitalWrite (enablePin, LOW); Definimos o enablePin LOW para habilitar o driver DRV8825
while (digitalRead (endStop) ==LOW)
{ Contanto que o valor digital da chave endStop seja BAIXO (a chave não está sendo pressionada).
digitalWrite (dirPin, HIGH); o sentido de rotação do motor é definido como anti-horário
for (int x =0; x <1; x ++)
{
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
} e o stepper girará no sentido anti-horário um passo de cada vez até que a condição da instrução While seja falsa.
digitalWrite (enablePin, HIGH);
} Isso desabilita nosso driver para que quando não estiver em uso o driver não consuma muita corrente.
void loop ()
{
if (digitalRead (irSensor) ==0)
{ No loop, se o valor digital do irSensor for 0 (há um obstáculo (mão) na frente do sensor de obstáculo IR)
digitalWrite (enablePin, LOW); O driver é habilitado.
digitalWrite (dirPin, LOW); A direção de rotação do motor é definida no sentido horário.
for (int x =0; x
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
} O stepper irá girar no sentido horário por 6000 passos.
atraso (2000); Isso vai esperar 2 segundos.
while (digitalRead (endStop) ==LOW)
{ Contanto que o valor digital da chave endStop seja BAIXO (a chave não está sendo pressionada.
digitalWrite (dirPin, HIGH); o sentido de rotação do motor é definido como anti-horário.
for (int x =0; x <1; x ++)
{
digitalWrite (stepPin, HIGH);
delayMicroseconds (2000);
digitalWrite ( stepPin, LOW);
delayMicroseconds (2000);
}
} e o stepper girará no sentido anti-horário um passo de cada vez até que a condição da instrução While seja falsa.
digitalWrite (enablePin, HIGH);
}
} Então, o driver será desabilitado até que a condição da instrução If seja verdadeira e o código seja reproduzido novamente.
Etapa 10:montagem
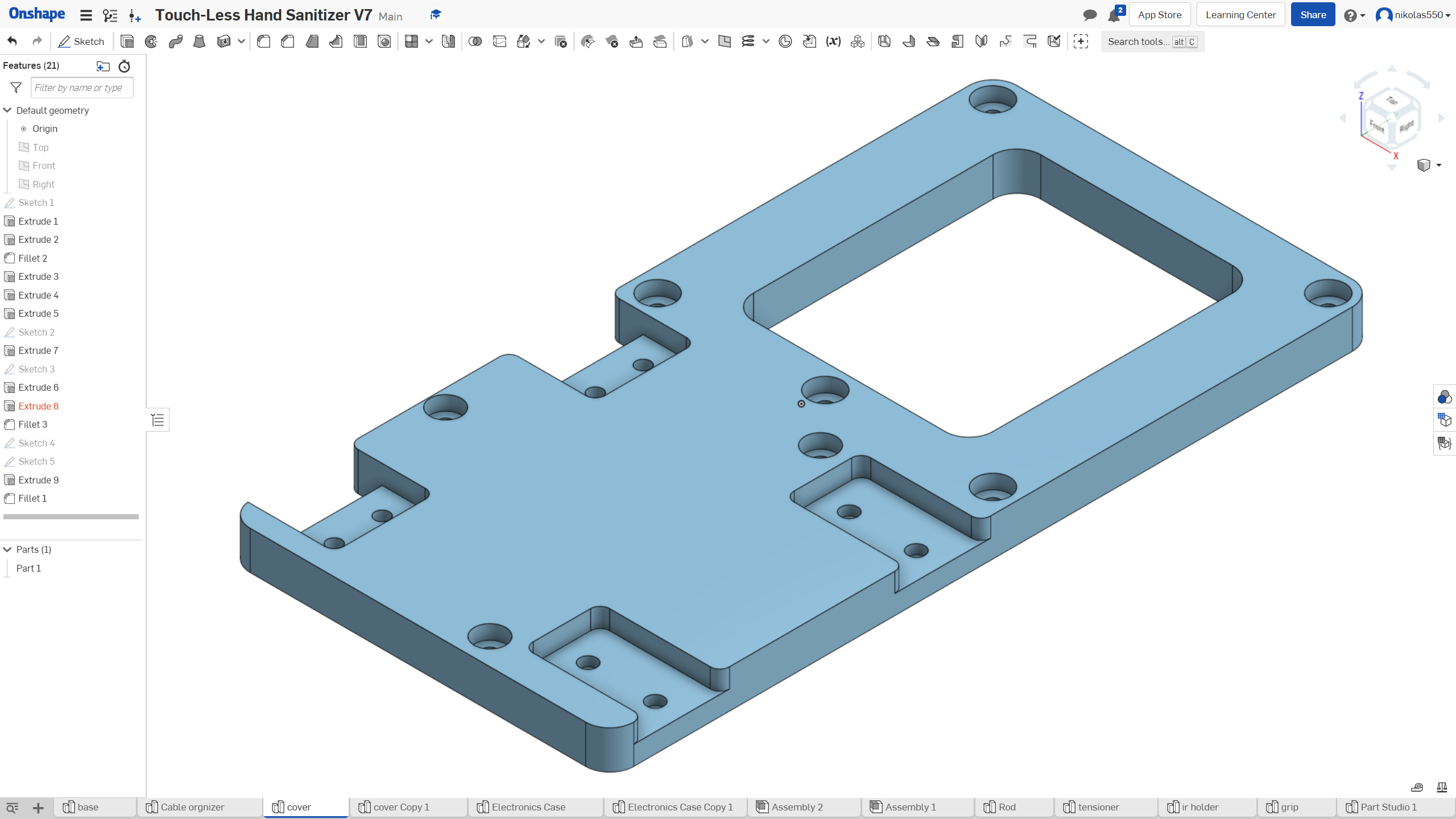
Conjunto da tampa


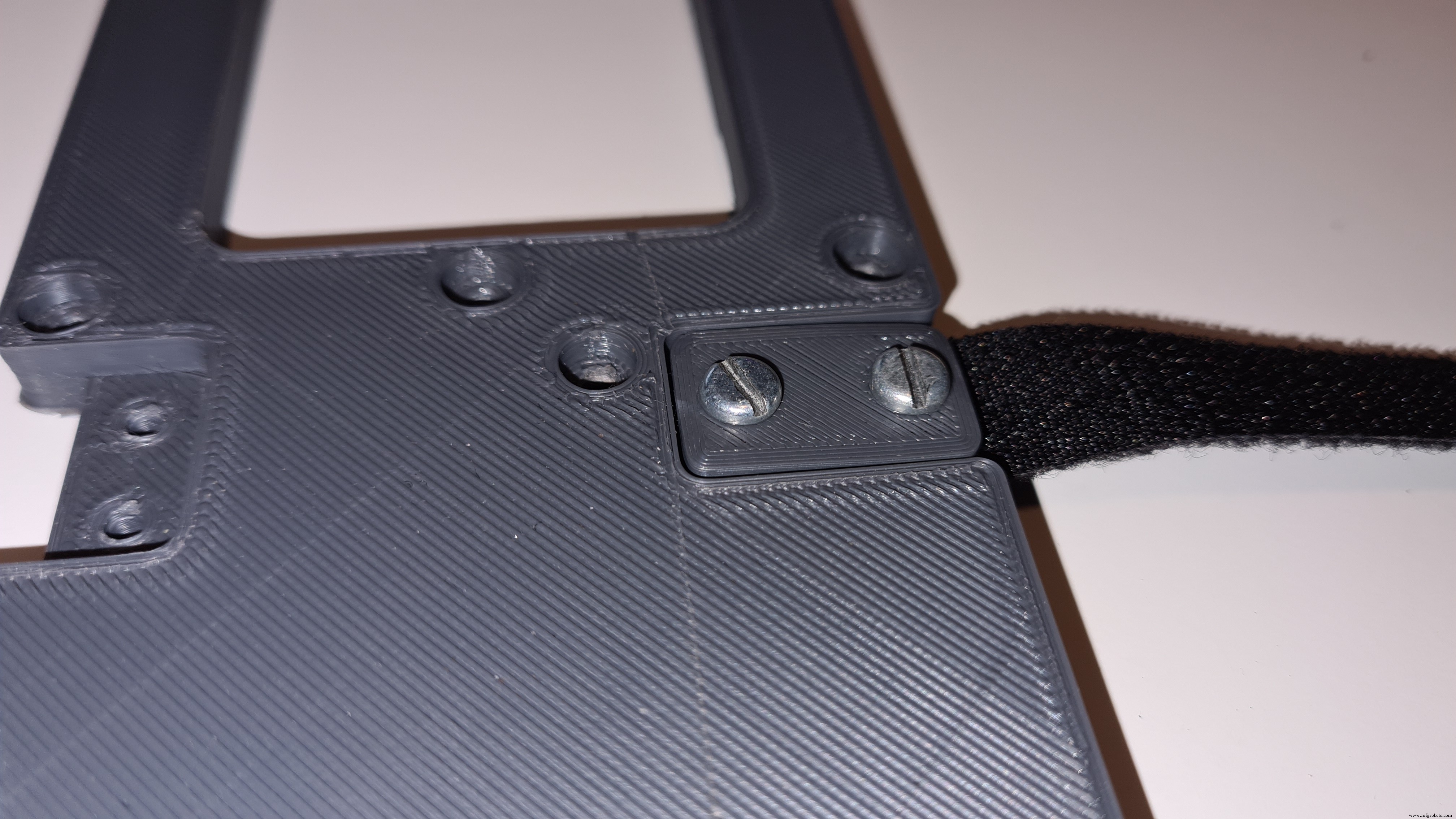

Basta colocar a tira de velcro na abertura, adicionar por cima o suporte e aparafusar.
x2


Aparafuse o velcro à capa. A montagem da tampa agora está completa!
x2
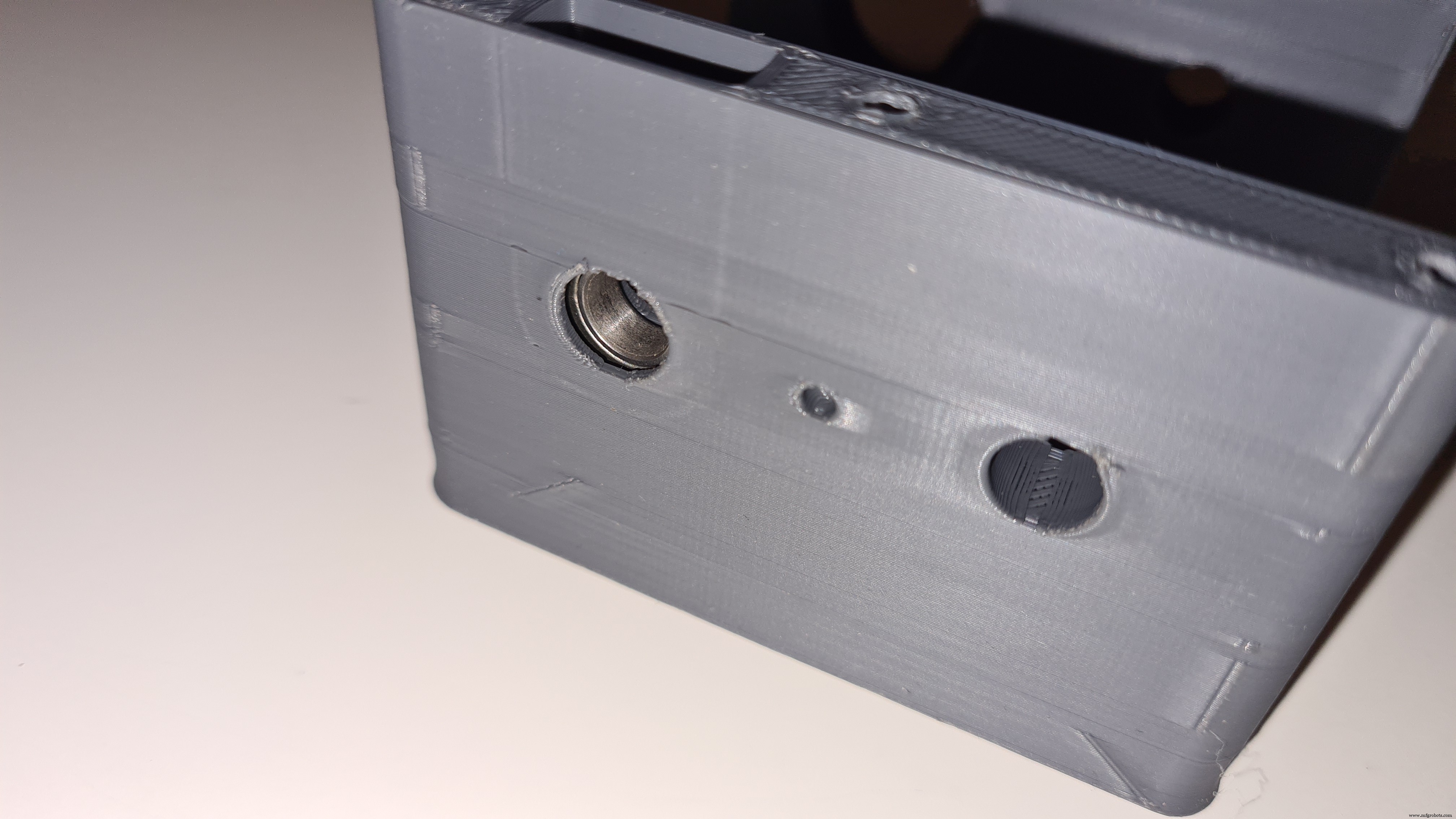
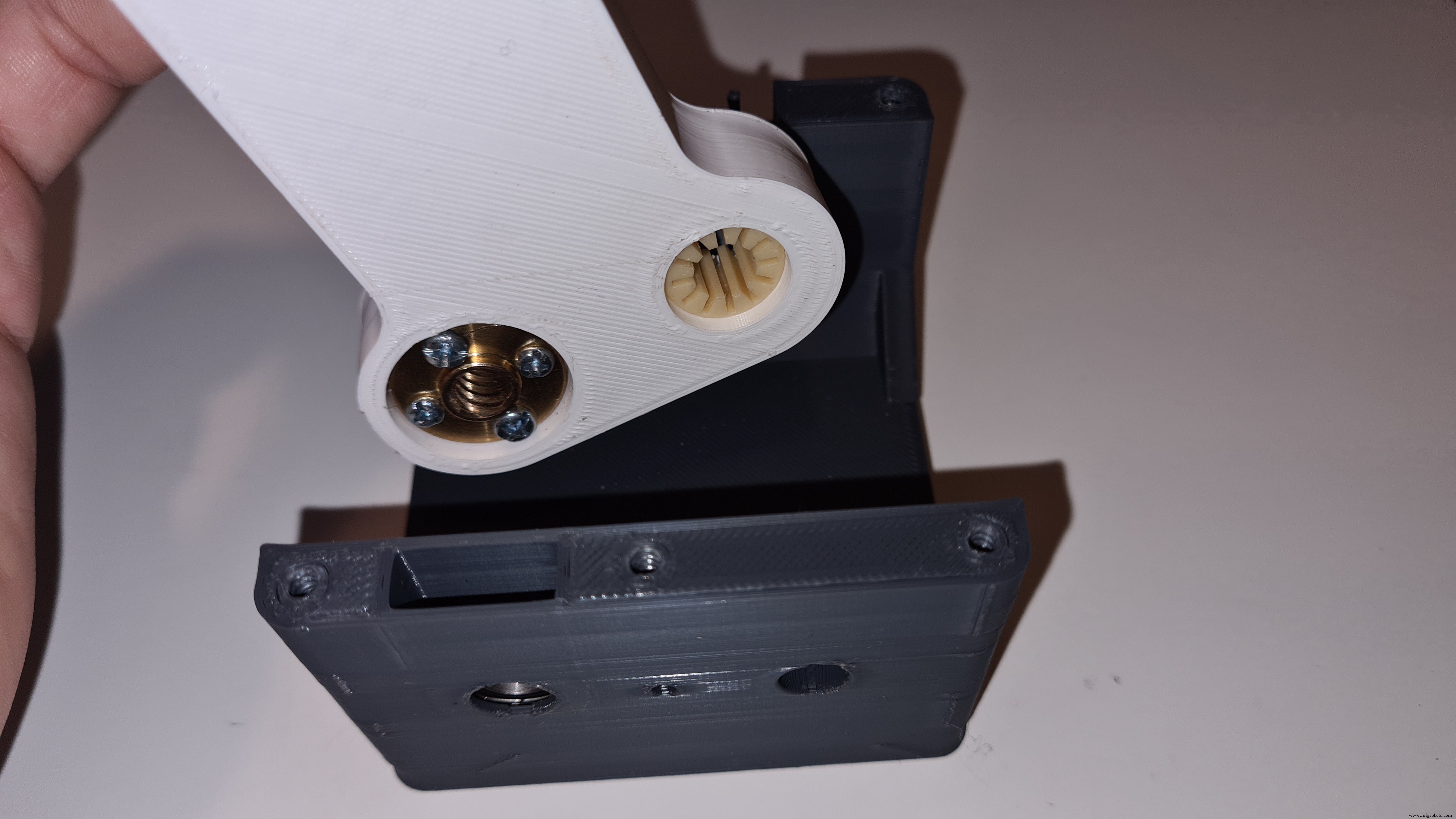
Conjunto da prensa

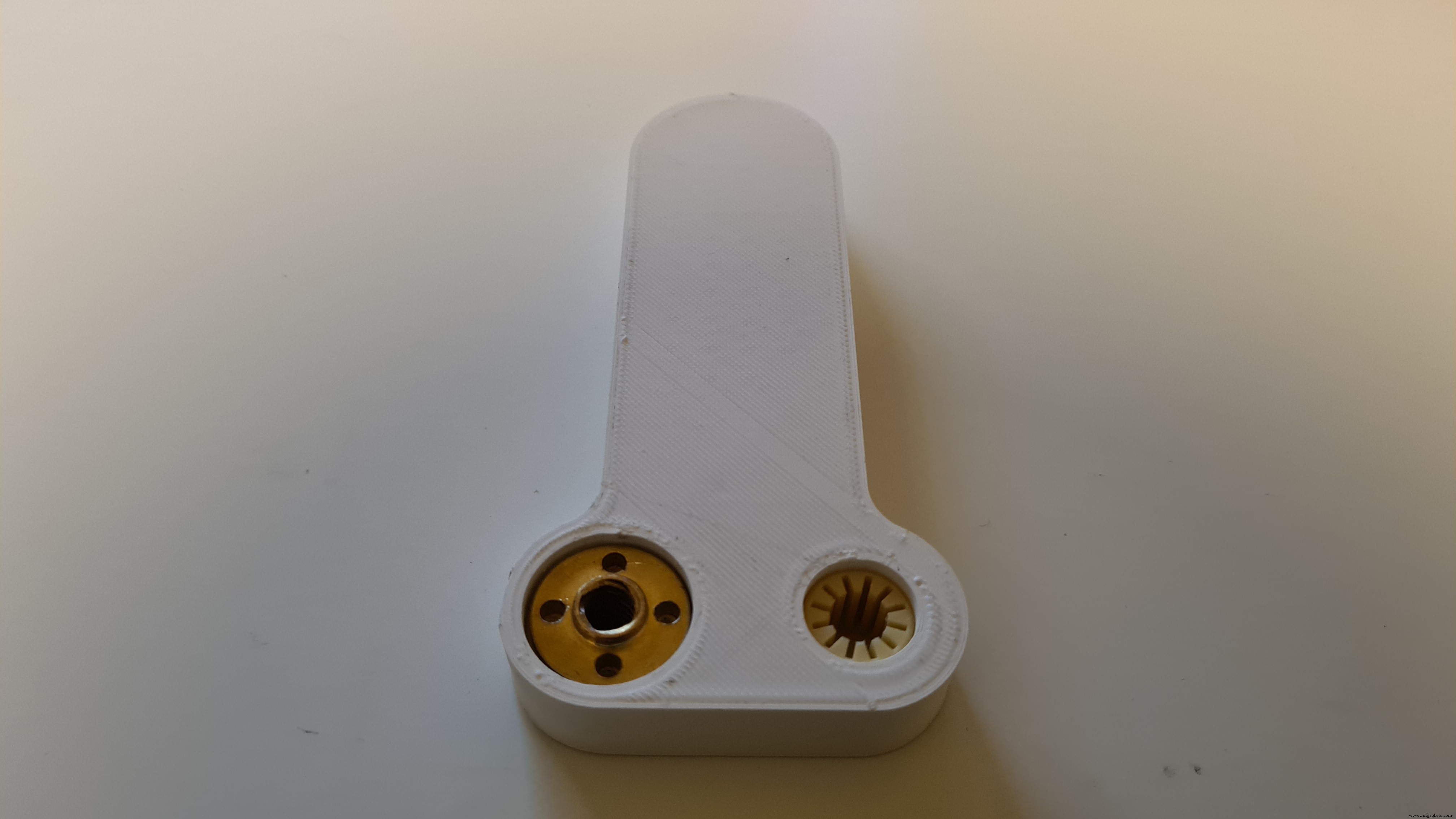

Empurre o rolamento linear no orifício direito até que esteja no meio. Aparafuse a porca T8 no orifício esquerdo do prensador com 4 parafusos.
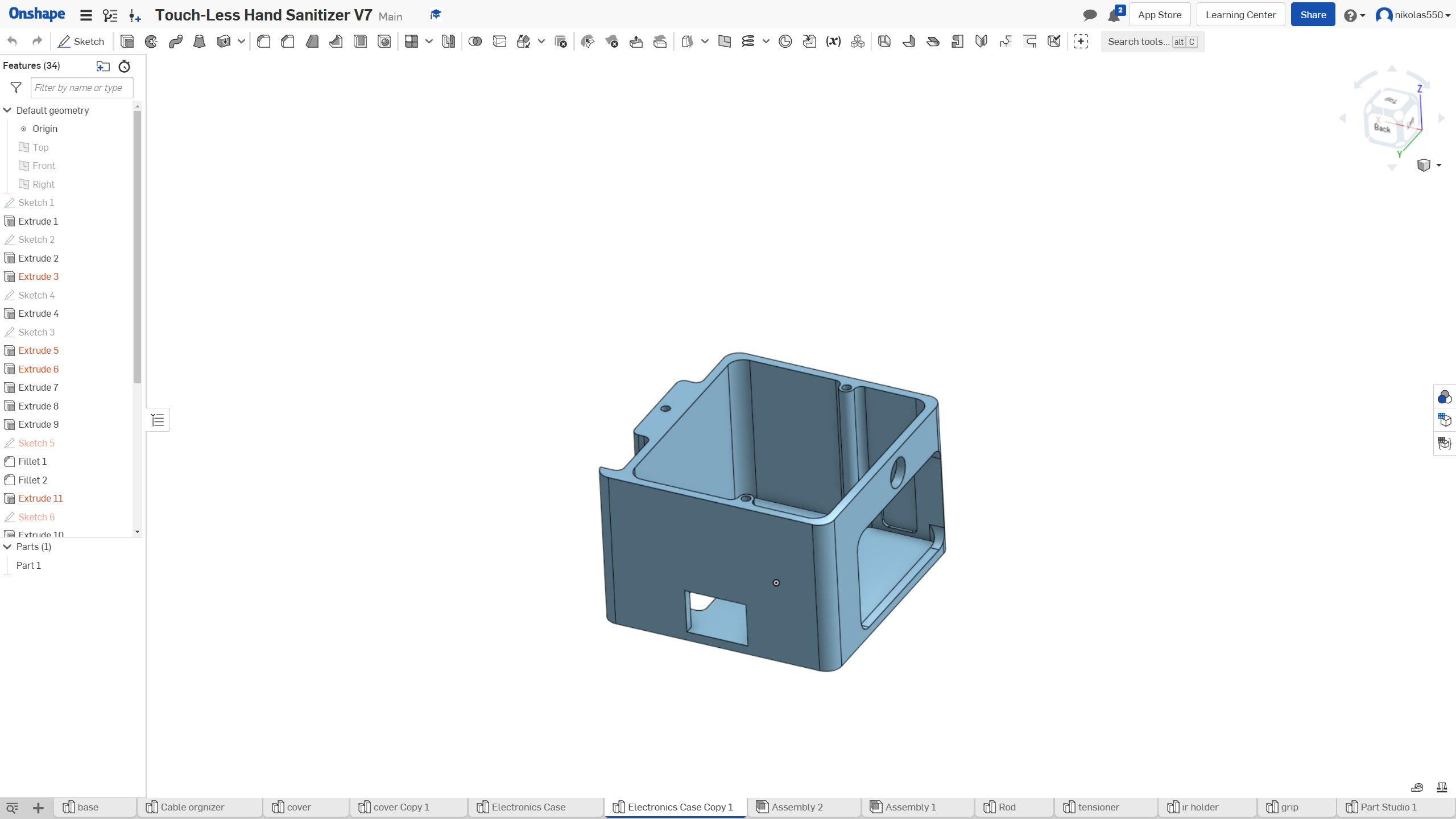
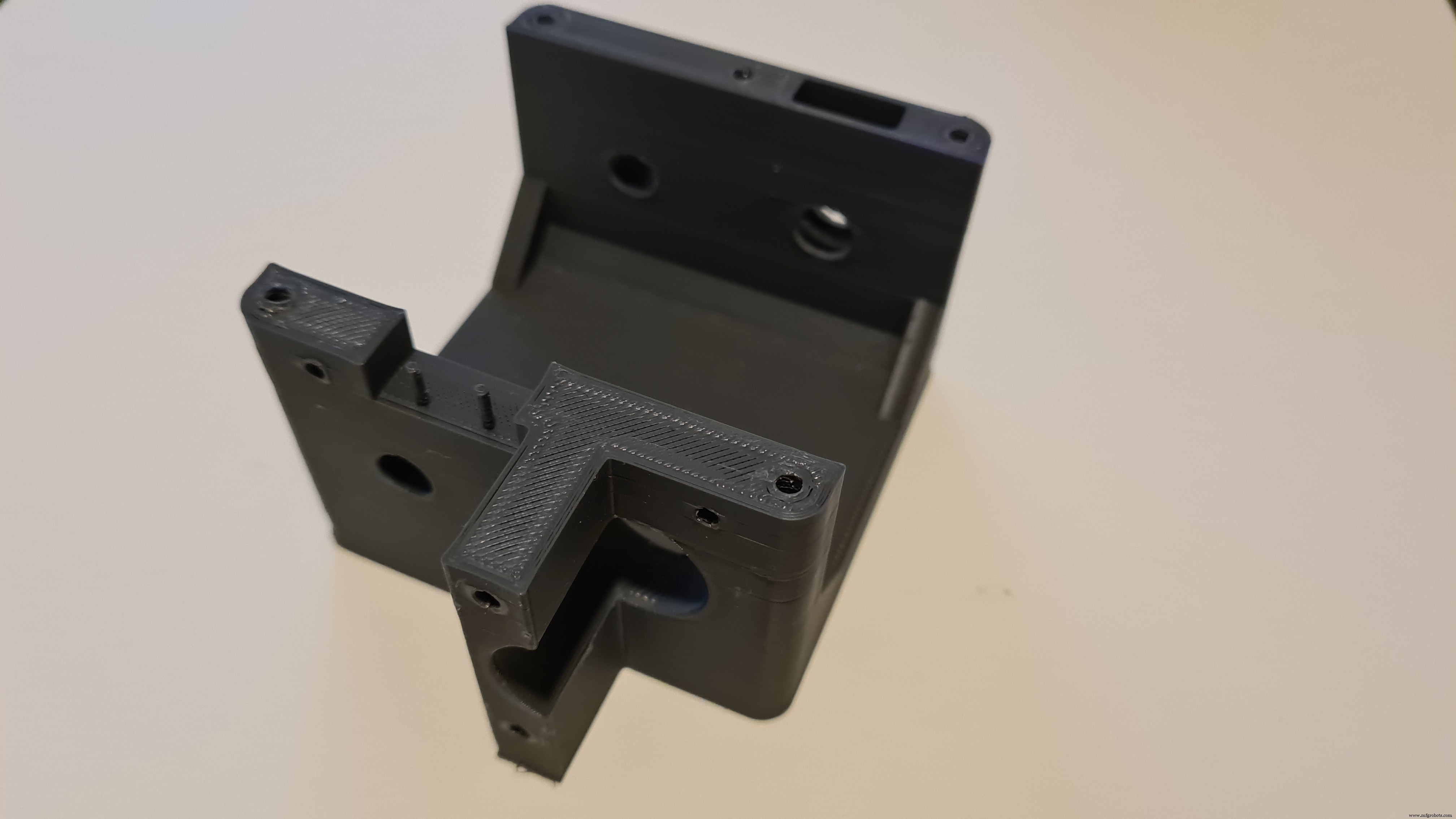
Montagem da caixa de eletrônicos
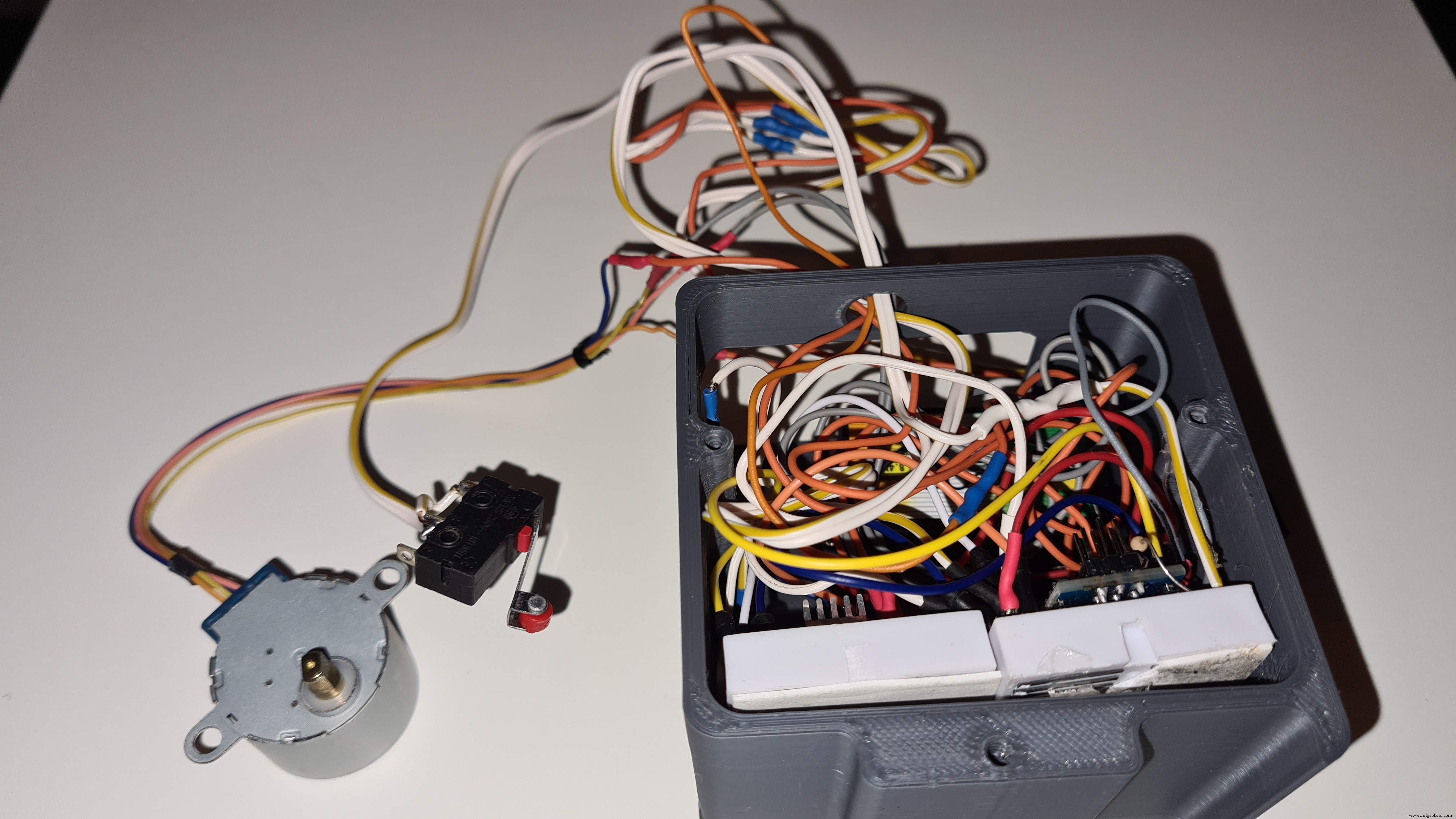
Coloque seu circuito na caixa de eletrônicos. Passe os cabos do stepper, do switch e do sensor de obstáculo IV pelo orifício.
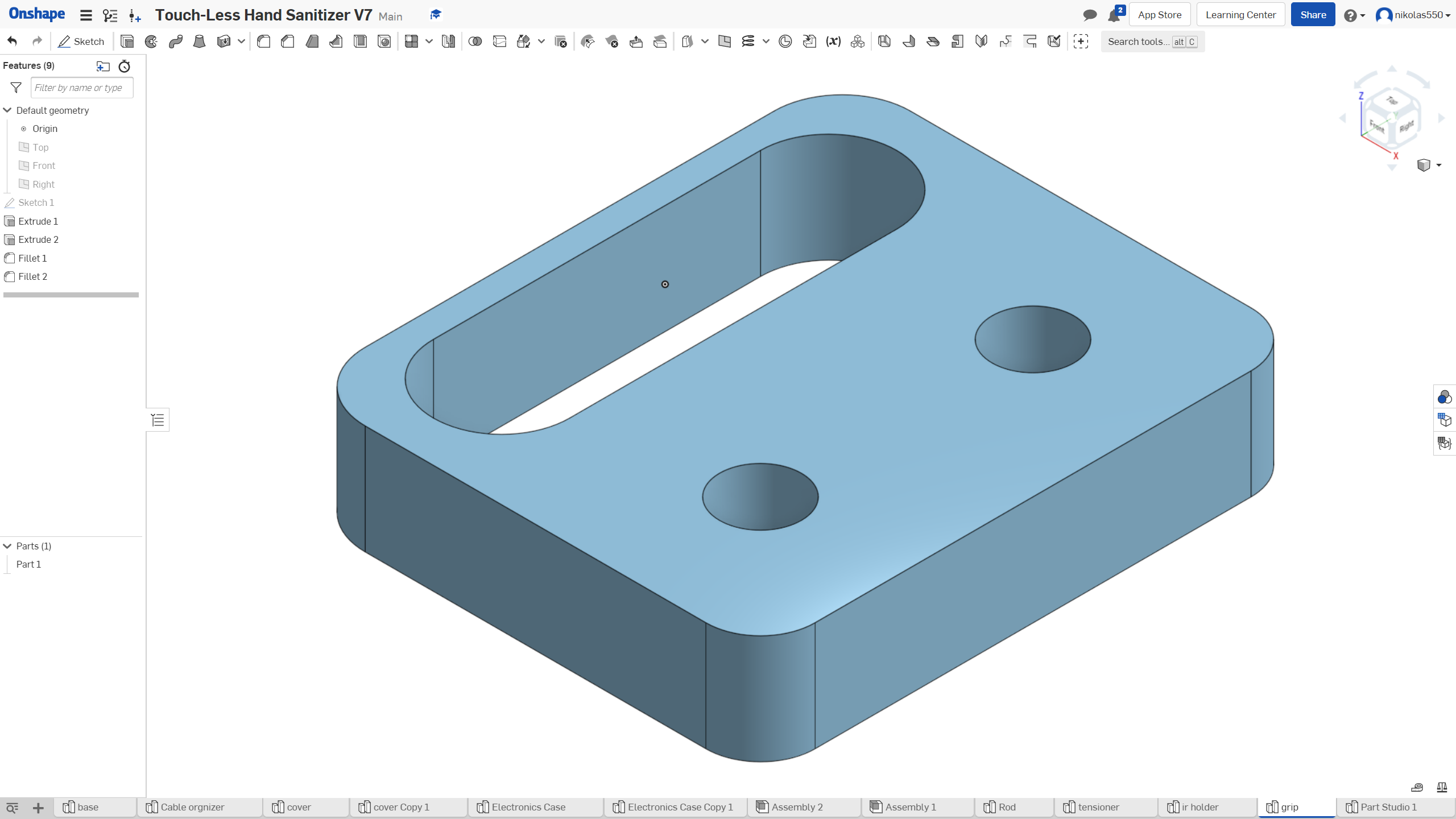
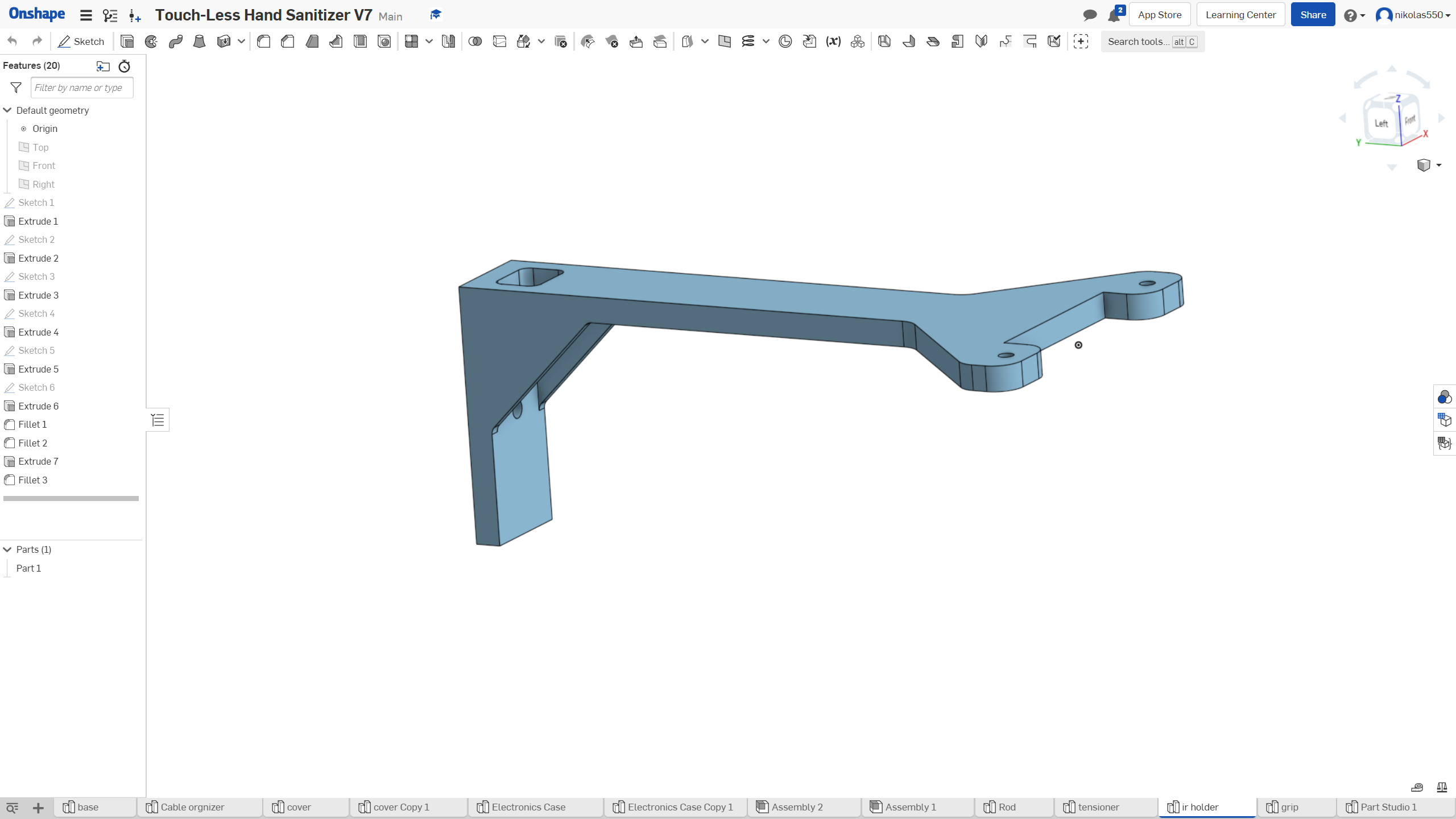
Conjunto de suporte do sensor de obstáculo IR
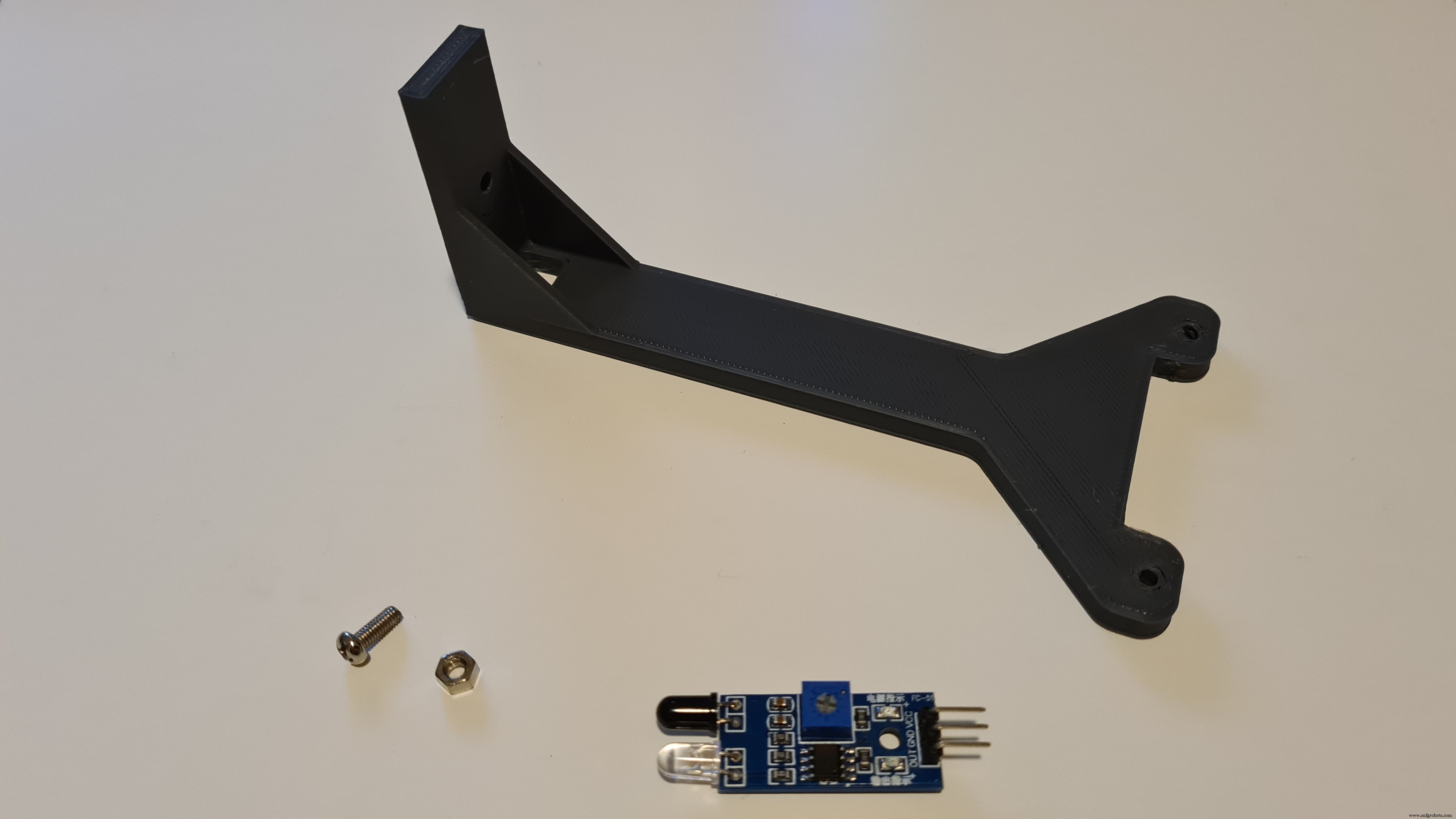
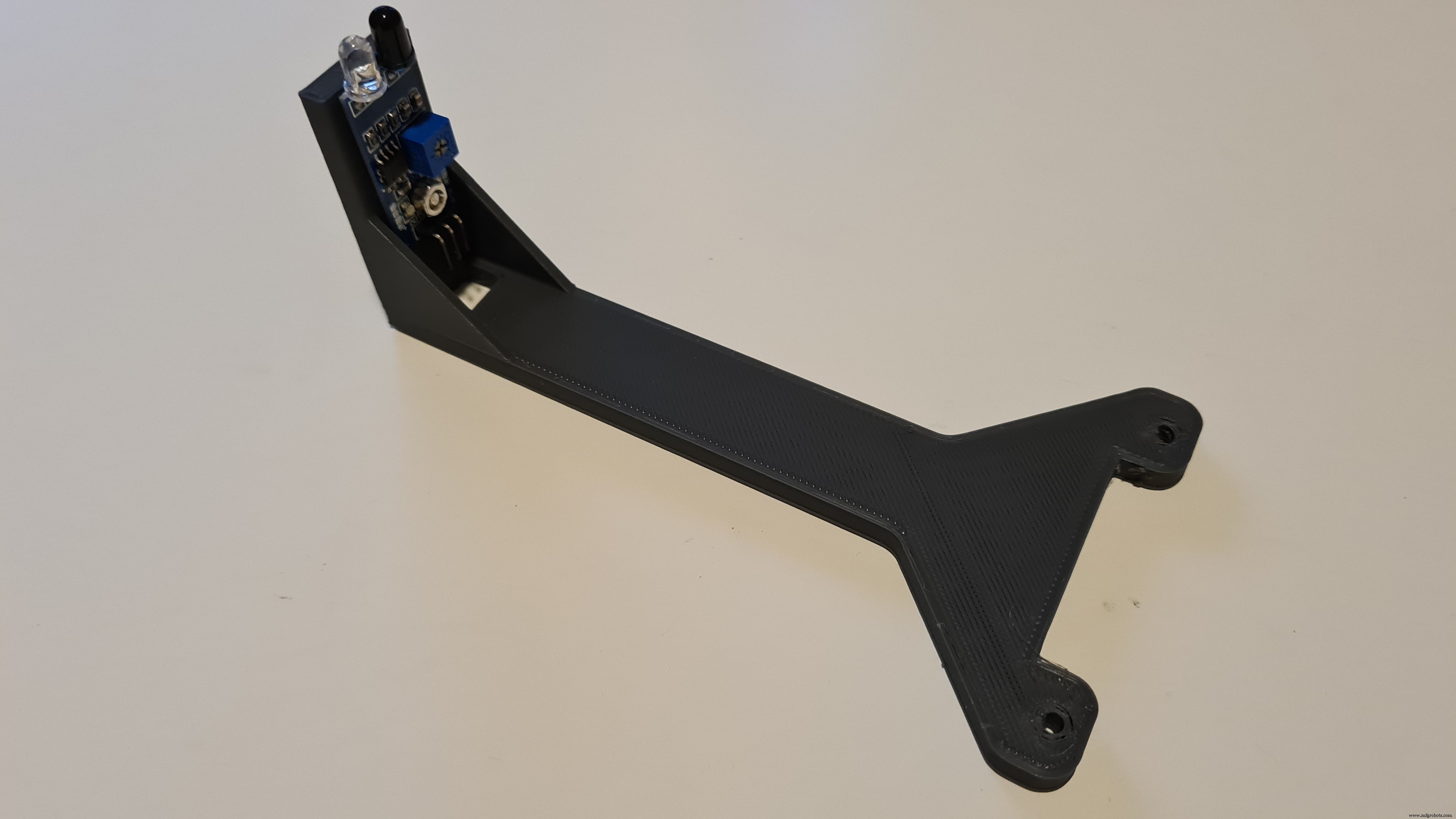
Aparafuse o Sensor de Obstáculos IV ao orifício e use uma porca para apertar o encaixe e ajustar a posição.
Montagem final!
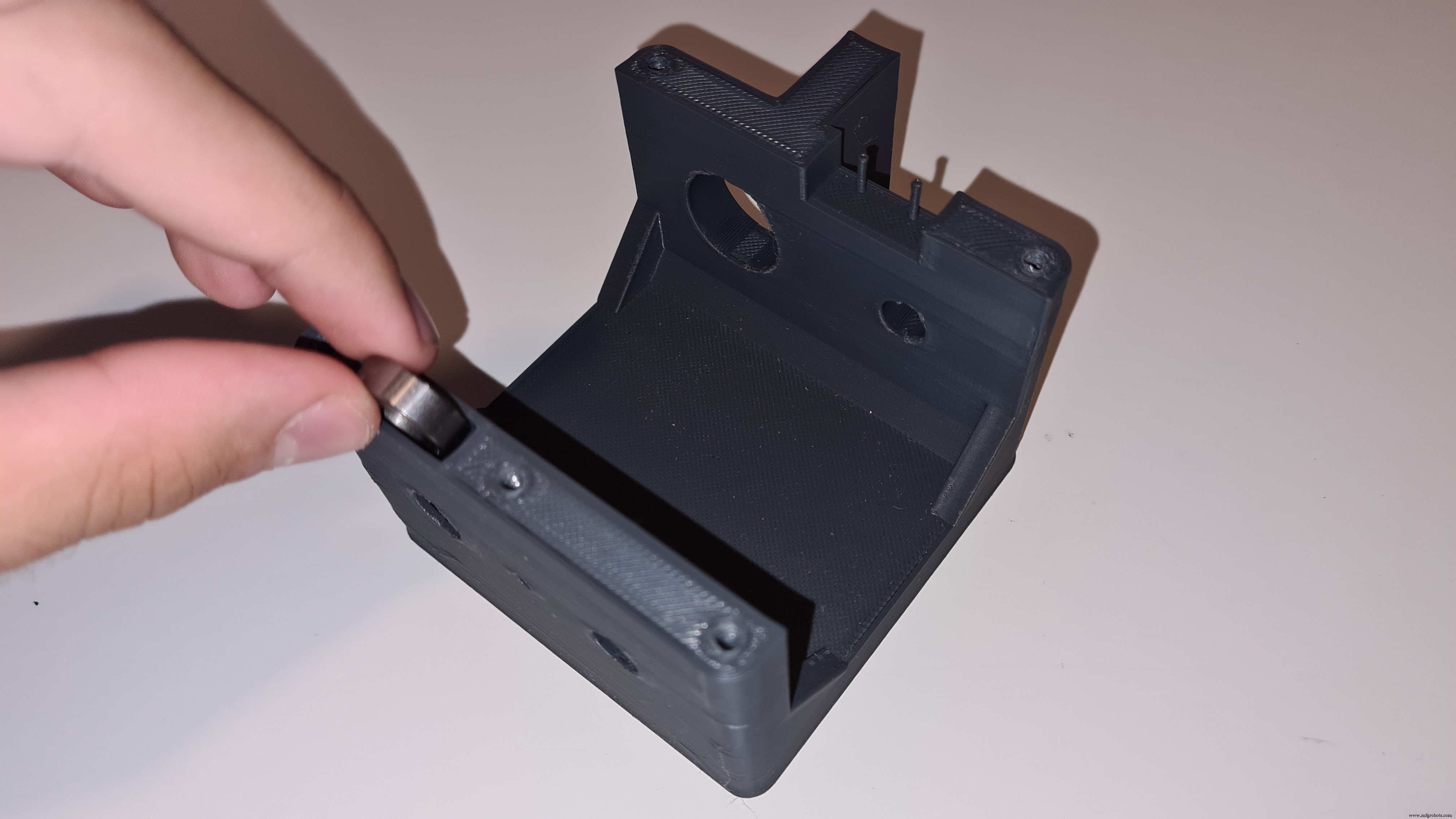
Insira o rolamento.

Adicione o parafuso T8 e o conjunto do prensador. (O parafuso T8 deve ter 70 mm a 82 mm de comprimento . Se você tiver um parafuso mais longo, deve cortá-lo no tamanho desejado usando uma ferramenta como uma serra. Caso contrário, você pode tentar imprimir um 3D.)

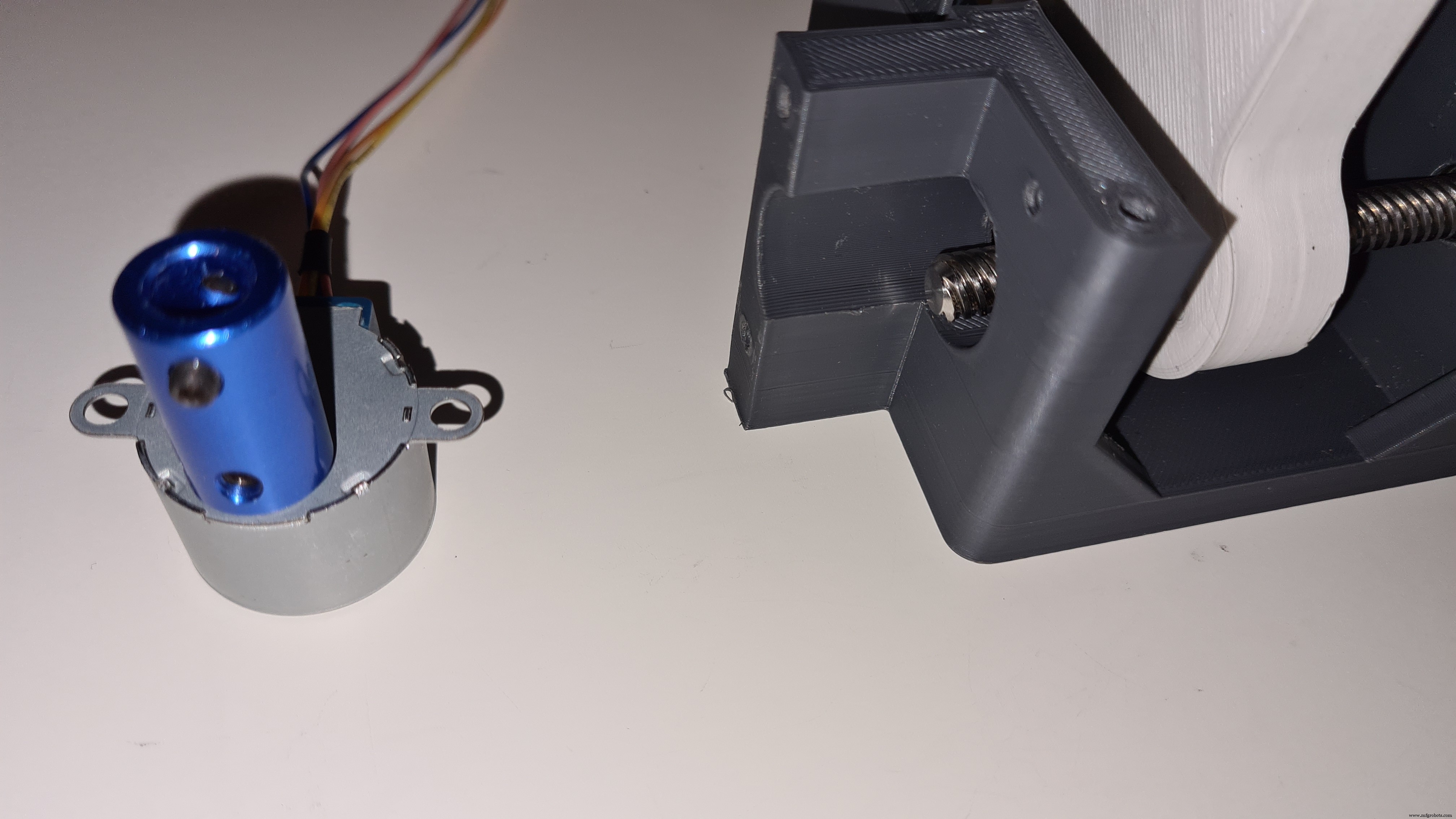
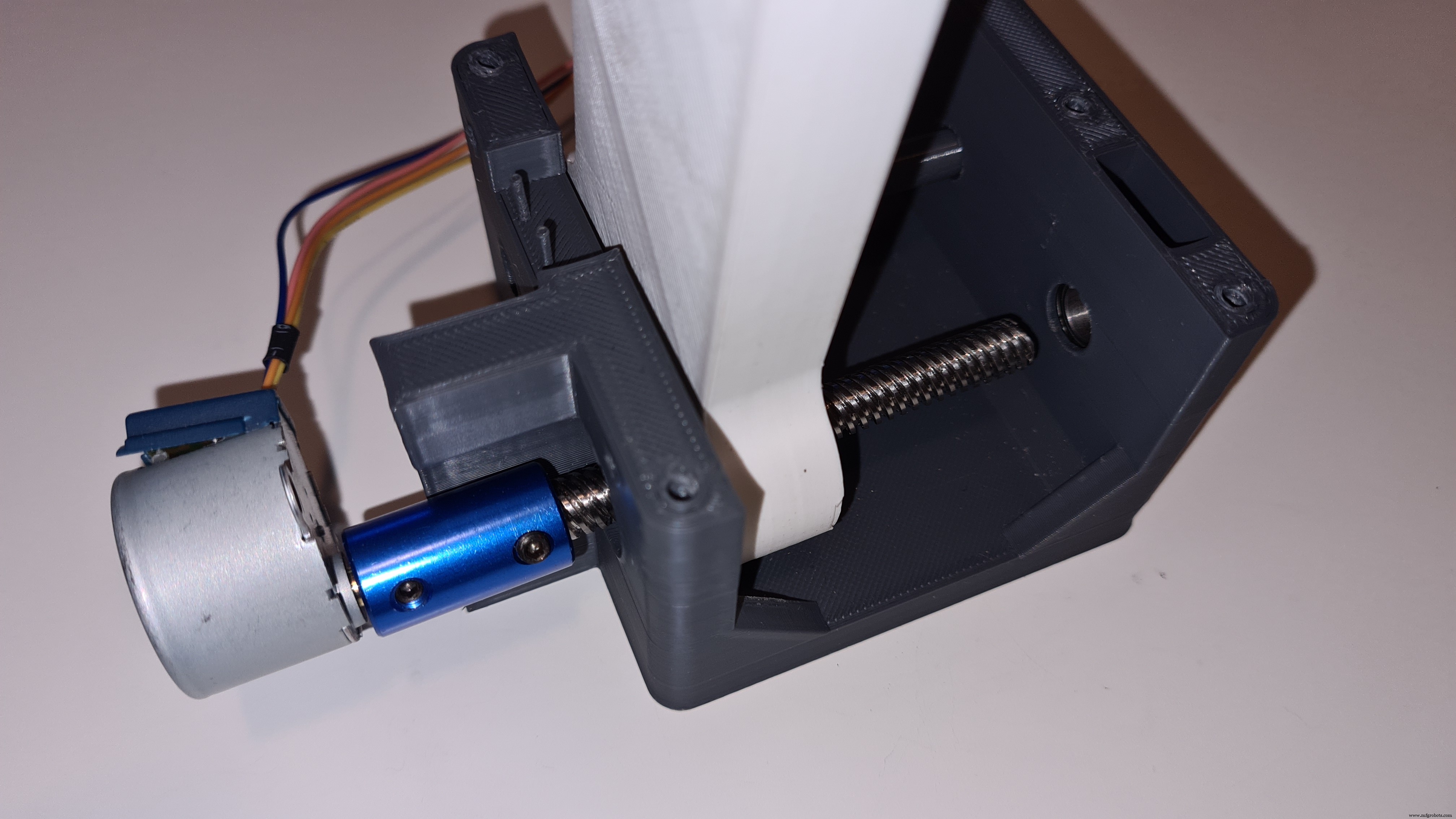
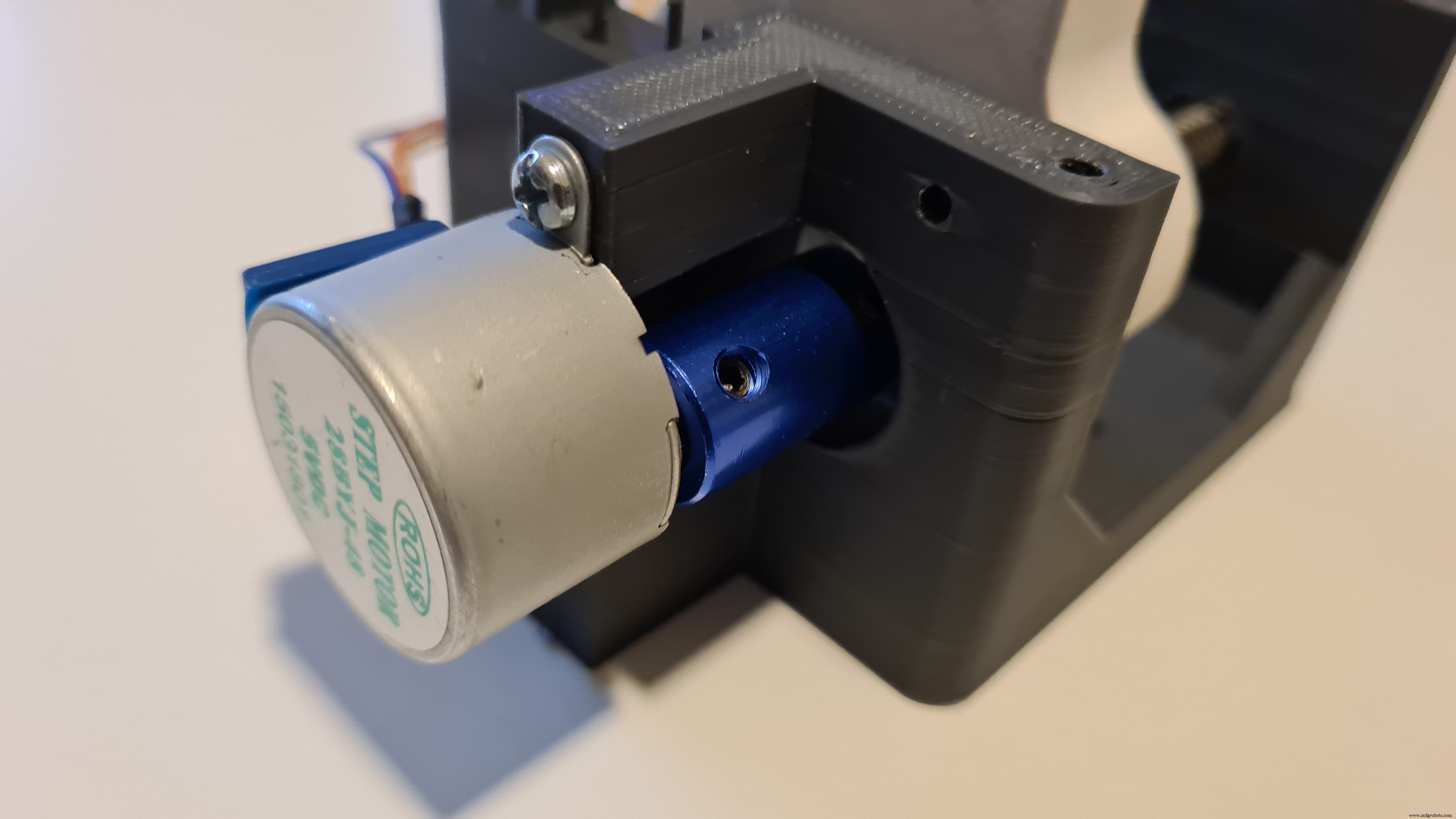
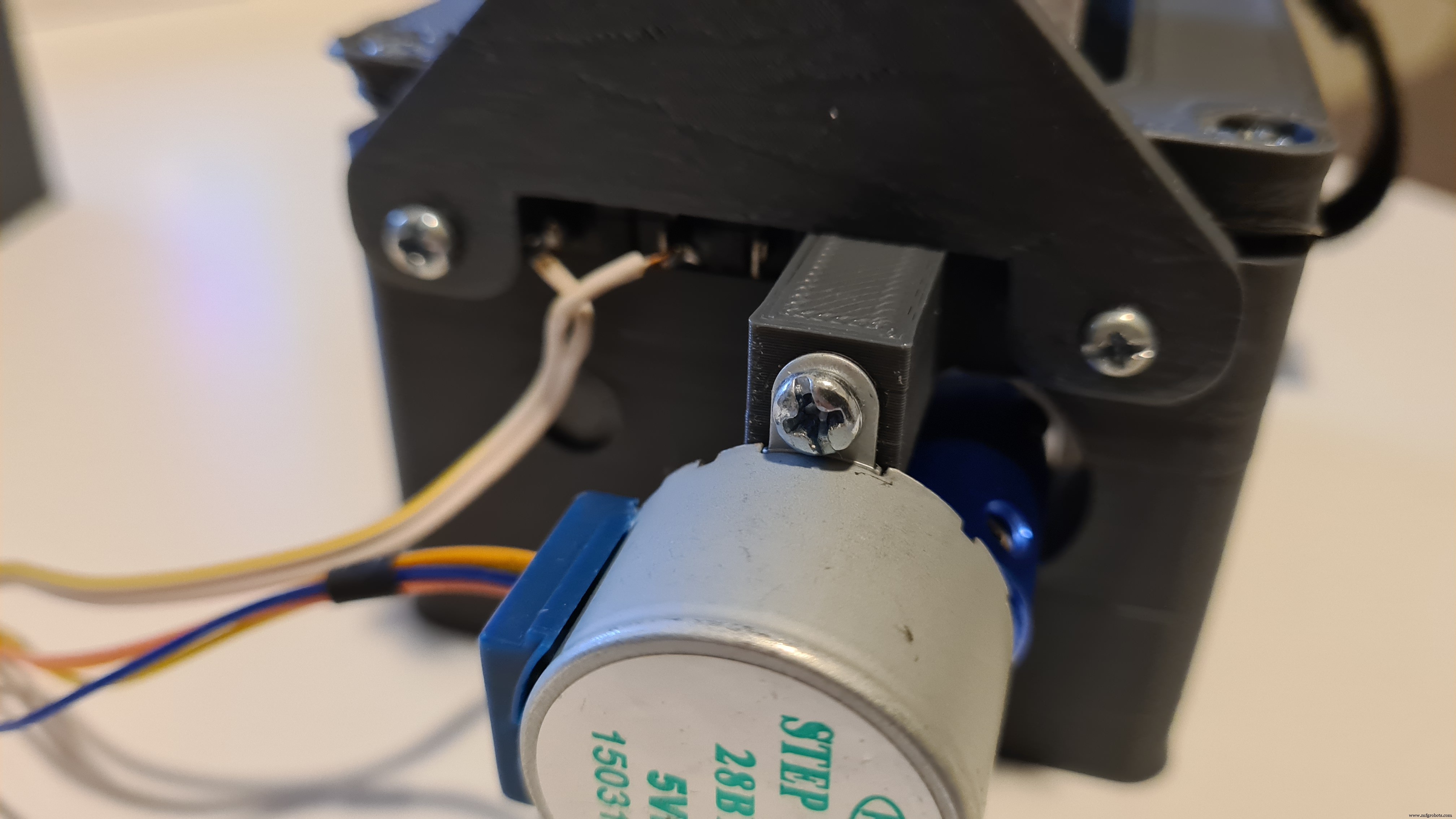
Aperte o acoplador ao eixo do motor. Em seguida, aperte-o ao parafuso T8. Por último, aparafuse o motor à base com dois parafusos.
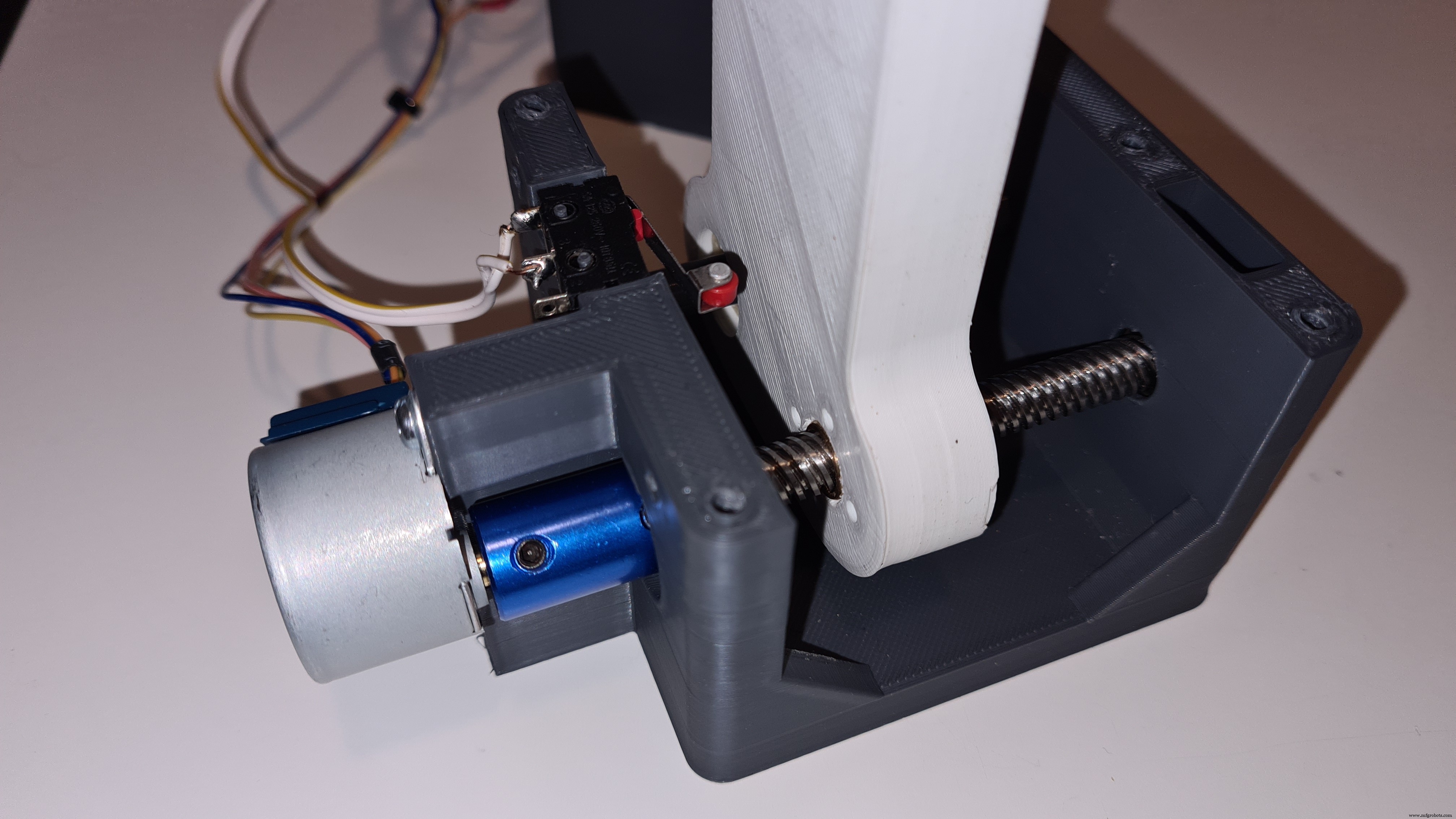
Adicione o interruptor de fim de curso.
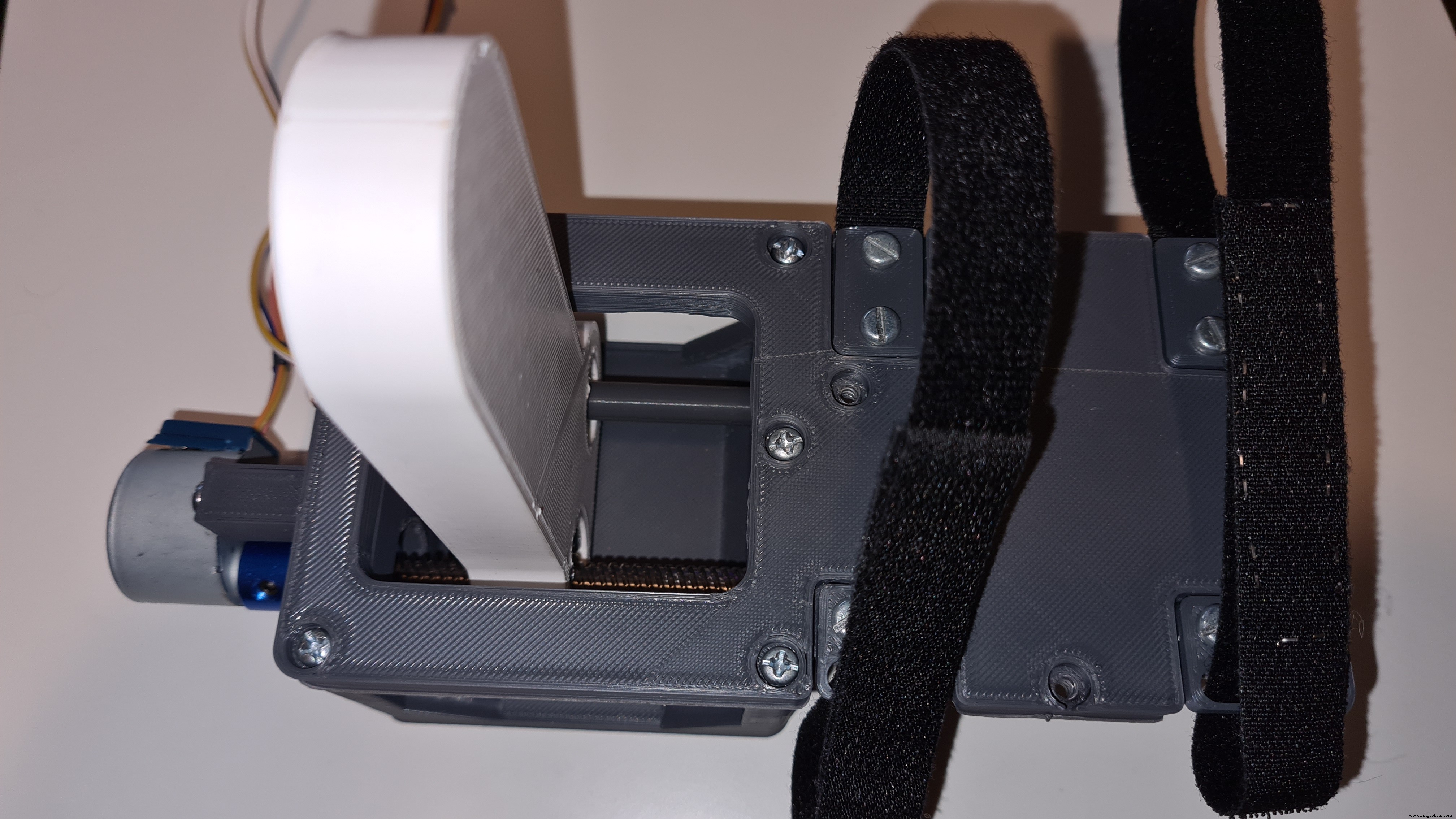
Aparafuse a tampa à base com 5 parafusos.


Aparafuse o suporte do sensor de obstáculo IV à frente da base com 2 parafusos.
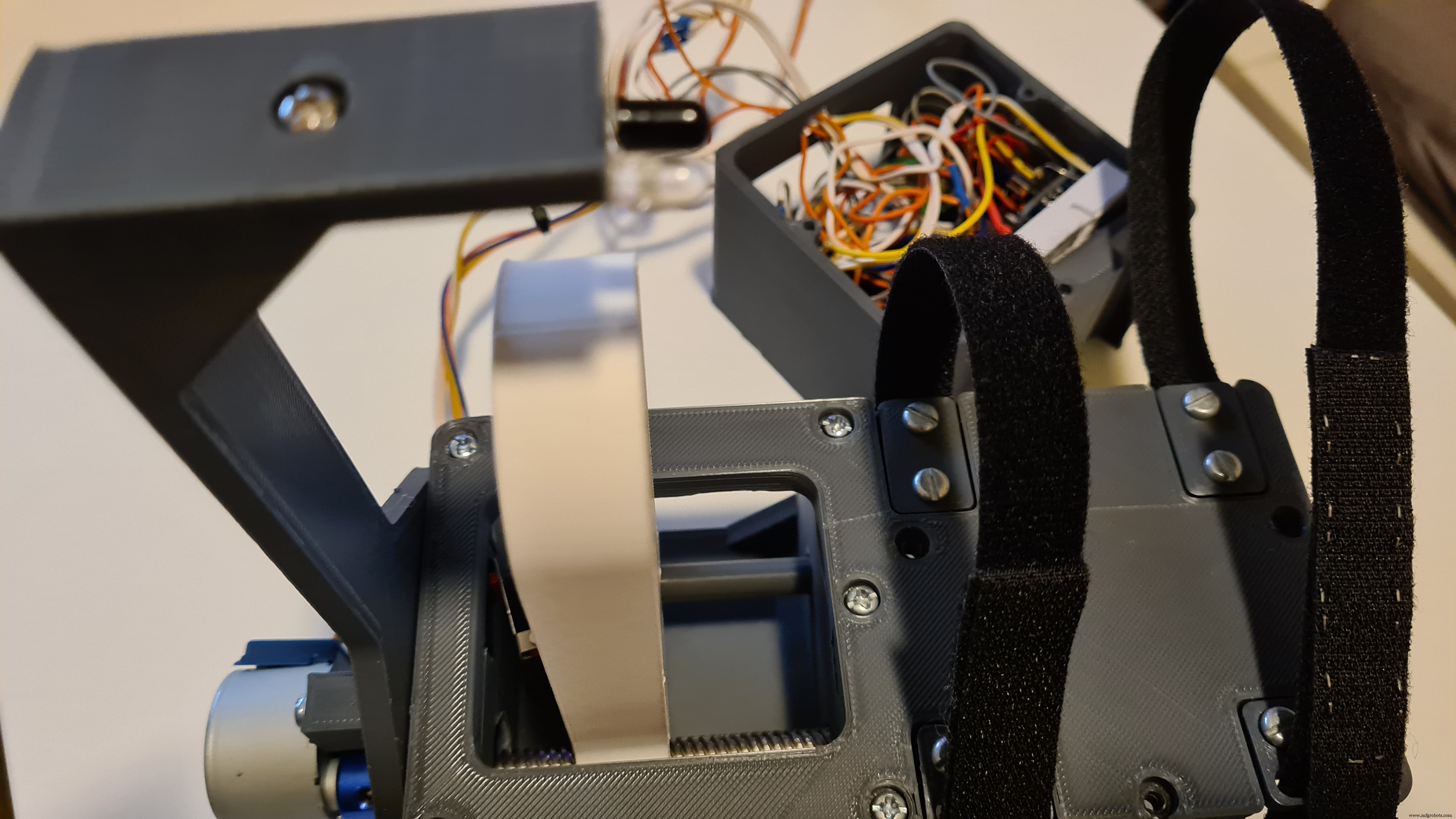
Por fim, aparafuse a caixa dos eletrônicos à tampa com 3 parafusos! Muito bem, o projeto está concluído!
Conclusão

Este projeto de um Acessório que pode tornar a maioria dos Desinfetantes de Mãos / Dispensadores de Sabão completamente Automáticos e Mãos Livres está finalmente concluído !!
Obrigado pelo seu tempo !!
Código
- Automatic_Hand_Sanitizer_Transformer.code
Automatic_Hand_Sanitizer_Transformer.code Arduino
O código do gadget // Define as conexões dos pinos e as etapas do motor por revoluçãoconst int dirPin =2; // definimos o pino de dir do driverconst int stepPin =3; // definimos o pino de passo do driverconst int enablePin =4; // definimos o pino de habilitação do driverconst int stepsPerRevolution =6000; // uma rotação completa (360 graus) é 2048 stepsint endStop =8; // definimos o pino de entrada do switchint endstop irSensor =9; // definimos o pino de entrada da configuração do sensorvoid de obstáculo IR () {pinMode (endStop , INPUT); // Declara pinos como entradas pinMode (irSensor, INPUT); pinMode (stepPin, OUTPUT); // Declara pinos como Saídas pinMode (dirPin, OUTPUT); pinMode (enablePin, OUTPUT); digitalWrite (enablePin, LOW); // Isso habilita nosso driver while (digitalRead (endStop) ==LOW) // Quando o código começa, o stepper irá girar até que a chave de parada final {// seja ativada digitalWrite (dirPin, HIGH ); // as direções são definidas como anti-horário // Gire o motor lentamente para (int x =0; x <1; x ++) {digitalWrite (stepPin, HIGH); delayMicroseconds (2000); digitalWrite (stepPin, LOW); delayMicroseconds (2000); }} digitalWrite (enablePin, HIGH); // Isso desativa nosso driver para que quando não // em uso o driver não consuma a corrente} void loop () {if (digitalRead (irSensor) ==0) // Se houver um obstáculo (mão) na frente do sensor de obstáculo IV {digitalWrite (enablePin, LOW); // Habilitamos o driverdigitalWrite (dirPin, LOW); // a direção é definida no sentido horário // Gire o motor lentamente para (int x =0; x Peças personalizadas e gabinetes
A base principal do dispositivo. Este é o componente que realmente pressiona o dispensador. A tampa do dispositivo. Funciona como um estojo para a parte eletrônica. Cria o mecanismo de velcro.Você vai precisar de dois deles. Atua como suporte para a parte do prensador. Ele se conecta à base e atua como suporte para o sensor de IR. Segura o Velcros na tampa.
Você precisará de 2 deles.
Esquemas
Processo de manufatura