


Braço robótico de materiais reciclados
Componentes e suprimentos
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
Aplicativos e serviços online
 |
| |||
 |
|
Sobre este projeto
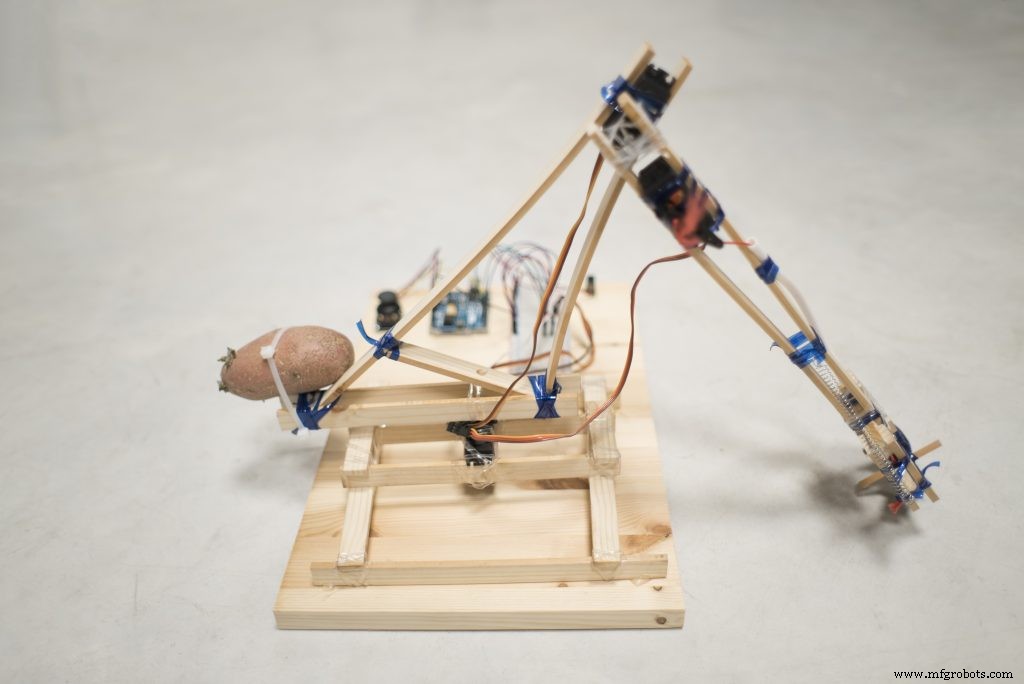
Braços robóticos são um dos projetos DIY mais populares que você encontrará online. Quando nos sentamos para projetar nossa versão de um braço de robô Arduino, decidimos aceitar um desafio e criá-lo com materiais reciclados. Na nossa opinião, ser fabricante também significa pensar fora da caixa e perguntar-se como utilizar os diferentes materiais que estão à sua disposição, sem produzir mais resíduos. Usando pedaços de madeira e algumas garrafas de plástico, montamos o corpo do braço do robô. Fizemos termorretráteis com garrafas de plástico com uma técnica bacana que aprendemos online e usamos uma batata (!) Como peso para que o robô não tombasse.
Este projeto foi muito divertido para nós, pois nos lembrou por que amamos fazer muito.
Você também pode encontrar o tutorial completo para este projeto e outros em nosso blog.
Observação:no video você verá uma versão anterior do circuito.io, portanto, é melhor seguir as etapas do tutorial.
Eletrônicos
Componentes principais
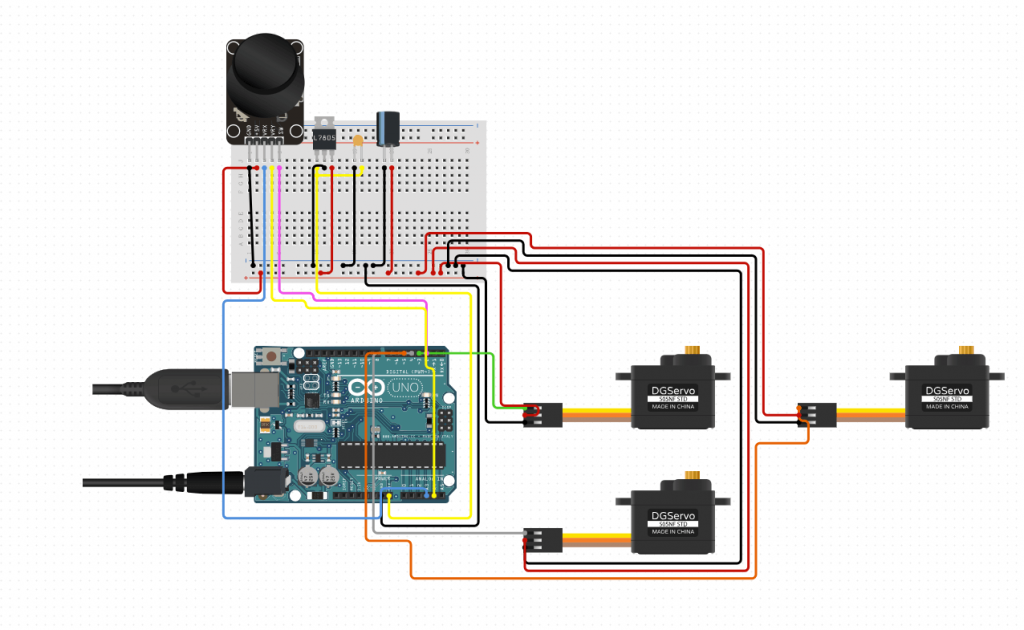
- Arduino UNO
- 3 servos SparkFun (Generic Metal Gear)
- Módulo PS2 Joystick 2 eixos
Componentes secundários
- Regulador de tensão 5v
- Capacitor eletrolítico - 1uF / 50V
- Capacitor cerâmico 100nF
- HeatSink TO-220
- BreadBoard - Metade do tamanho
- Pacote de fios de jumpers - M / M
Clique aqui para ver o diagrama de fiação
Código do braço do robô
- Primeiro, você precisará fazer download do código do circuito na guia de código em circuito.io.
- Siga as etapas para verificar se você ligou corretamente
- Substitua o código de teste firmware.ino do circuito.io pelo código firmware.ino do repositório. Deixe as outras bibliotecas como estão.
- Certifique-se de deixar "Incluir bibliotecas" e "Definições de pinos". Verifique se as definições de pinos correspondem.
Materiais

- Usamos sobras de madeira com 1 cm de espessura que tínhamos em nossa oficina. Em alguns lugares, colamos 2 peças para obter força e robustez extras. Você pode verificar se há outros materiais à sua volta, mas certifique-se de que seja resistente, mas flexível.
- Para amarrar as peças, fizemos termorretráteis com garrafas de plástico. É uma técnica incrível que você pode fazer com garrafas de plástico que tem em casa. Brinque e teste-os um pouco, você ficará surpreso com o quão forte eles são.
- O braço se move em 3 eixos, portanto, vamos usar 3 servo motores. Aqui está um bom artigo que explica como escolher um servo motor para seu projeto. Vamos usar o Sparkfun Servo - engrenagem de metal genérica.
Montagem
A base
Comece a construção com uma base sólida para que o braço não tombe. Ao mesmo tempo, também precisamos entender qual seria a melhor maneira de amarrar e amarrar os pedaços de madeira para que a base seja sólida.
Na imagem abaixo você pode ver a forma como usamos os termoencolhíveis e uma batata (!) Como base como peso. Só não se esqueça de substituí-lo de vez em quando :)
Saldo
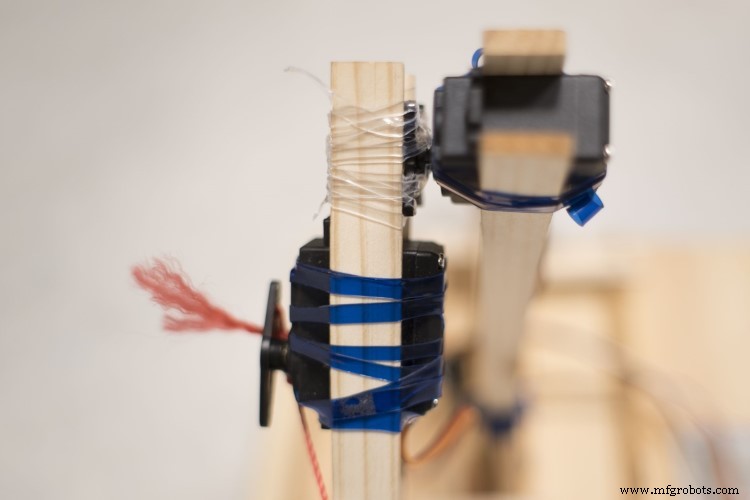
Colocar o segundo servo foi mais complicado e sentimos que esta área ainda precisa de alguma atenção. Percebemos, depois de construir o protótipo, que não havíamos pensado o suficiente para equilibrar a parte superior do braço. Portanto, o servo motor consome muita corrente - algo que pode ser superado usando um contrapeso no lado oposto do braço.
A garra
Existem diferentes tipos de garras que consideramos, e não tínhamos certeza do que faríamos aqui. Por fim, decidimos deixar um lado da garra estático para que tenha uma pegada forte. Como você pode ver na imagem abaixo, para a parte móvel fizemos uma junta, que é controlada pelo servo e acrescentamos uma mola para fechar e abrir.
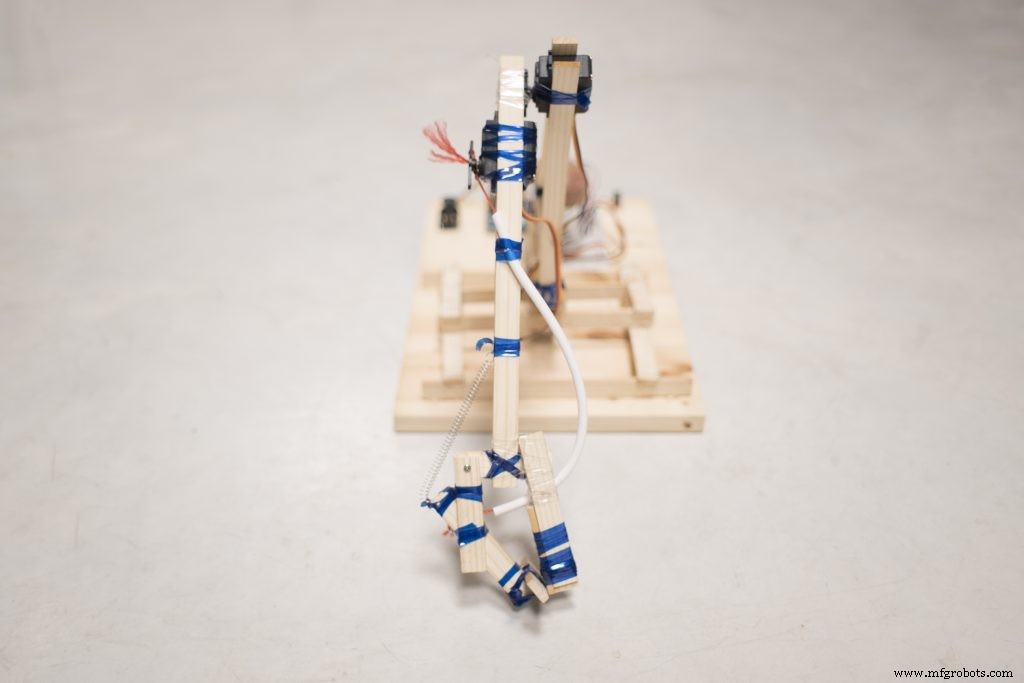
Eventualmente, colocamos um fio dentro de um tubo elástico para conectar entre o servo motor e a garra, o mesmo mecanismo que você pode encontrar nos freios de bicicleta.
É basicamente isso! Provavelmente, você precisará fazer pequenos ajustes e alterações no código e na mecânica de acordo com o material e a parte eletrônica que usar. Se você tiver alguma ideia ou comentário, adoraríamos ouvi-lo! Compartilhe-os conosco em nosso fórum ou nos comentários abaixo
Código
Código do braço robótico
1. Substitua o código de teste firmware.ino do circuito.io pelo código firmware.ino neste repositório2. Deixe as outras bibliotecas como estão.3. Certifique-se de deixar "Incluir bibliotecas" e "Definições de pinos" 4. Verifique se as definições dos pinos correspondem ahttps://github.com/Circuito-io/Robotic-ArmProcesso de manufatura
- O braço do robô impresso em 3D de código aberto da Haddington Dynamics
- Robô SCARA de braço duplo
- Diferenças entre o Manipulador do Robô e o Braço do Robô
- Braço do robô MeArm - Seu robô - V1.0
- Arduino 3D-Printed Robotic Arm
- Braço robótico controlado por Nunchuk (com Arduino)
- Braço do robô controlado por Ethernet
- Braço Robótico de Solda Automatizado
- GXO pilota braço robótico personalizado para logística de comércio eletrônico de moda
- O braço robótico industrial - um boom de fabricação