


Terceiro olho para cegos
Componentes e suprimentos
 |
| × | 5 | |||
| × | 5 | ||||
| × | 5 | ||||
| × | 5 | ||||
 |
| × | 5 | |||
 |
| × | 5 | |||
 |
| × | 5 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Ferramentas e máquinas necessárias
 |
| |||
 |
|
Aplicativos e serviços online
 |
|
Sobre este projeto
- A primeira tecnologia vestível para cegos
- Usando ondas ultrassônicas para detectar os obstáculos
- Notificando o usuário por meio de vibrações / som da campainha
O terceiro olho para cegos é uma inovação que ajuda os cegos a navegar com velocidade e confiança, detectando os obstáculos próximos com a ajuda de ondas ultrassônicas e notificando-os com uma campainha ou vibração. Eles só precisam usar este dispositivo como uma faixa ou pano.
Segundo a OMS, 39 milhões de pessoas são consideradas cegas em todo o mundo. Eles estão sofrendo muitas dificuldades em sua vida diária. Os afetados utilizam há muitos anos a tradicional cana branca que, embora seja eficaz, ainda apresenta muitas desvantagens. Outra maneira é ter um animal de estimação, como um cachorro, mas é muito caro. Assim, o objetivo do projeto é desenvolver uma forma barata e mais eficiente de auxiliar os deficientes visuais a navegar com maior conforto, rapidez e confiança.
Vídeo
Assista ao vídeo sobre como está funcionando.
Assista ao vídeo que veio em um canal de notícias (idioma malaiala)
Novidade do projeto: Esta é a primeira tecnologia vestível para cegos que resolve todos os problemas das tecnologias existentes. Hoje em dia existem tantos instrumentos e dispositivos inteligentes para pessoas com deficiência visual para navegação, mas a maioria deles tem certos problemas de transporte e a principal desvantagem é que eles precisam de muito treinamento para serem usados. Uma das principais peculiaridades desta inovação é que ela é acessível para todos, sendo o custo total inferior a $ 25 (~ 1500INR). Não existem no mercado tais dispositivos que possam ser usados como um pano e que tenham um custo tão baixo e tão simples. Quando utilizado em larga escala, com melhorias no protótipo, beneficiará drasticamente a comunidade.
Etapa 1:sistemas existentes

- Bengala branca
- Cachorro de estimação
- Dispositivos inteligentes (por exemplo:Visão de uma tocha para cortinas)
Problema dos sistemas existentes:
- Bengala branca - Pode rachar / quebrar facilmente. O pau pode ficar preso nas rachaduras do pavimento de diferentes objetos.
- Cachorro de estimação - custo enorme. (~ $ 42.000 / 280000Rs)
- Desvantagens comuns (incluindo os dispositivos inteligentes) Não pode ser transportado facilmente, precisa de muito treinamento para usar
As características do terceiro olho para cegos pessoas: Ao usar este dispositivo, eles podem evitar totalmente o uso de bengala branca e outros dispositivos. Este dispositivo ajudará os cegos a navegar sem segurar um pedaço de pau, o que é um pouco chato para eles. Eles podem simplesmente usá-lo como uma faixa ou pano e pode funcionar com muita precisão e eles precisam apenas de um pouco de treinamento para usá-lo.
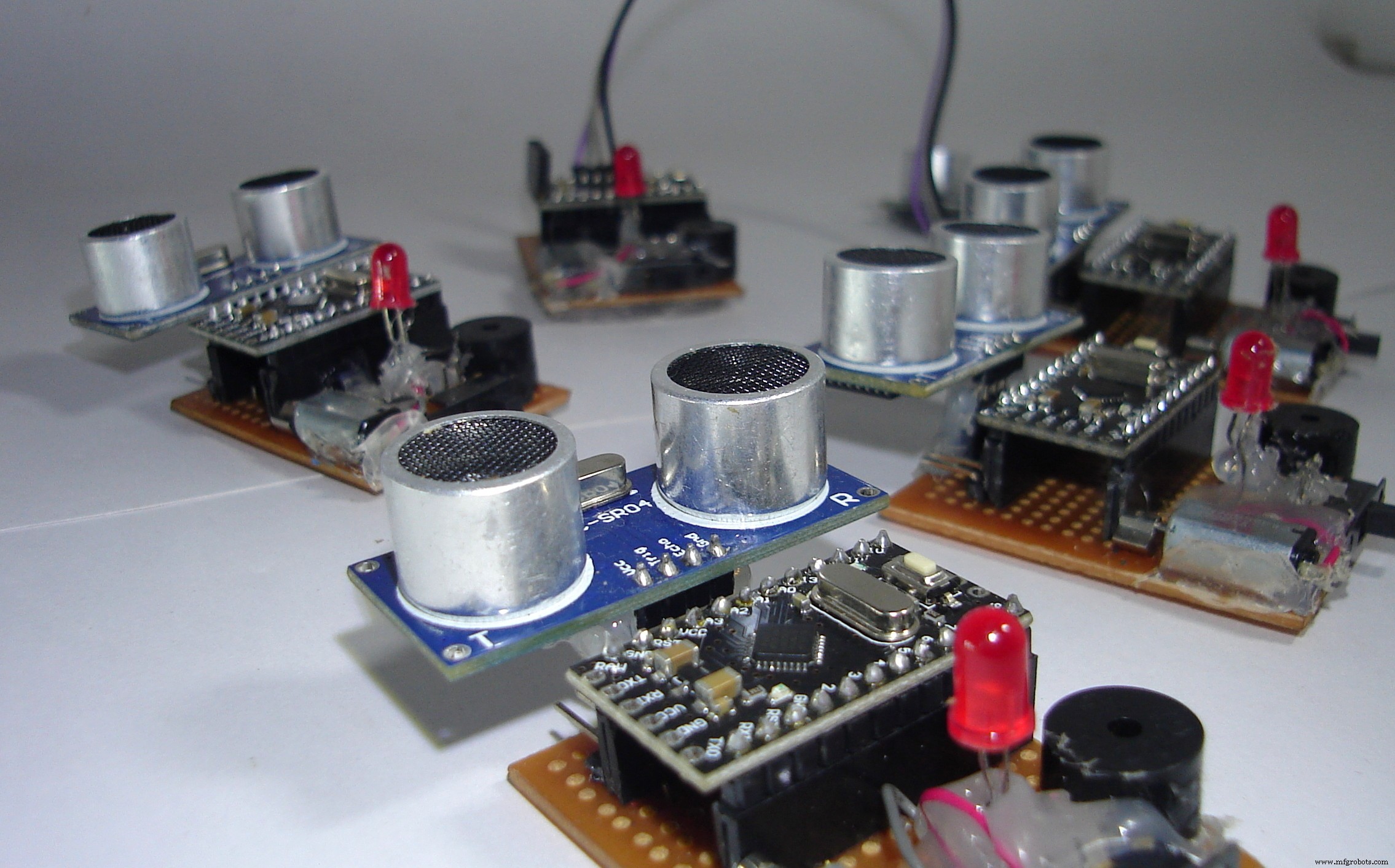
Etapa 2:Descrição completa do projeto
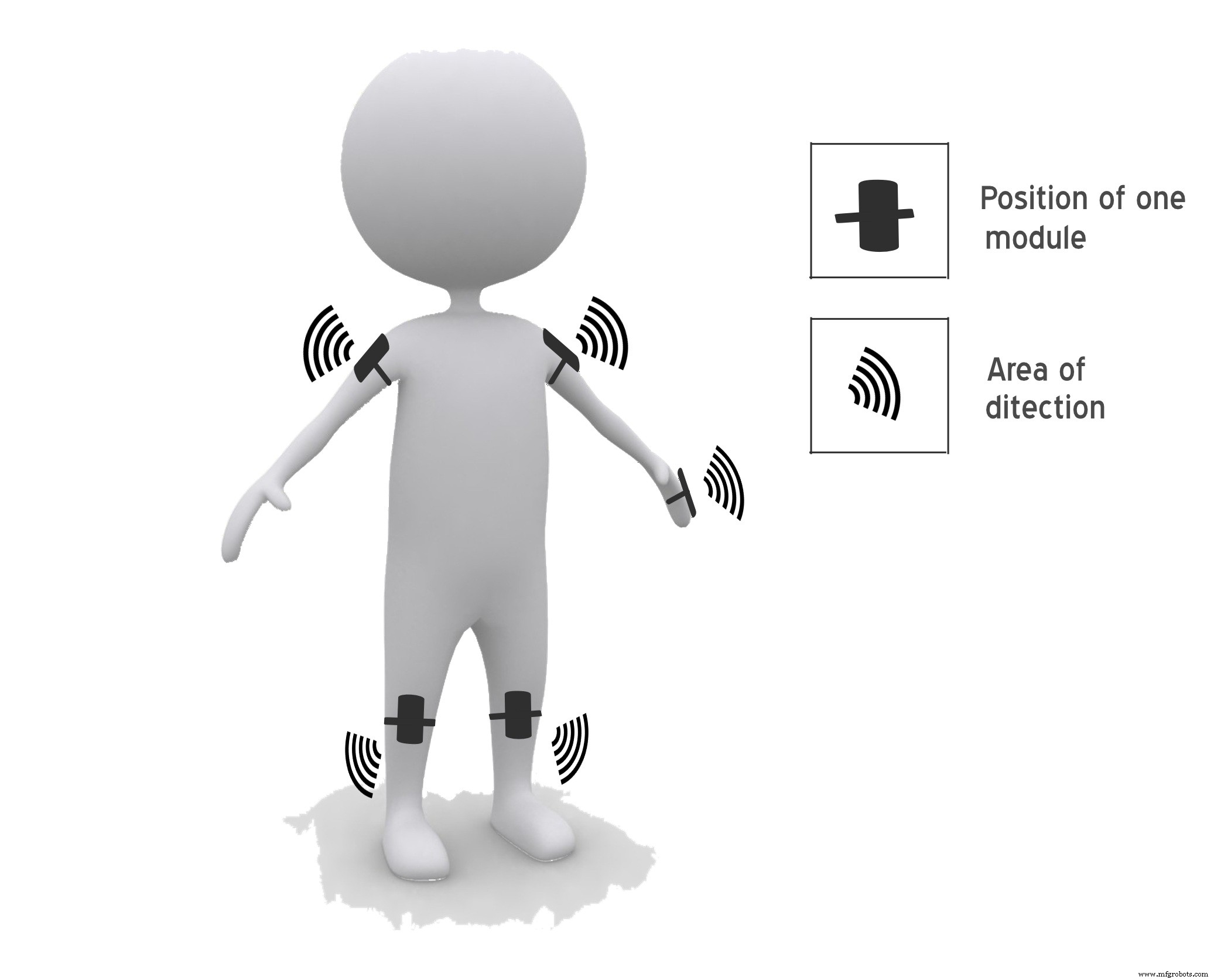
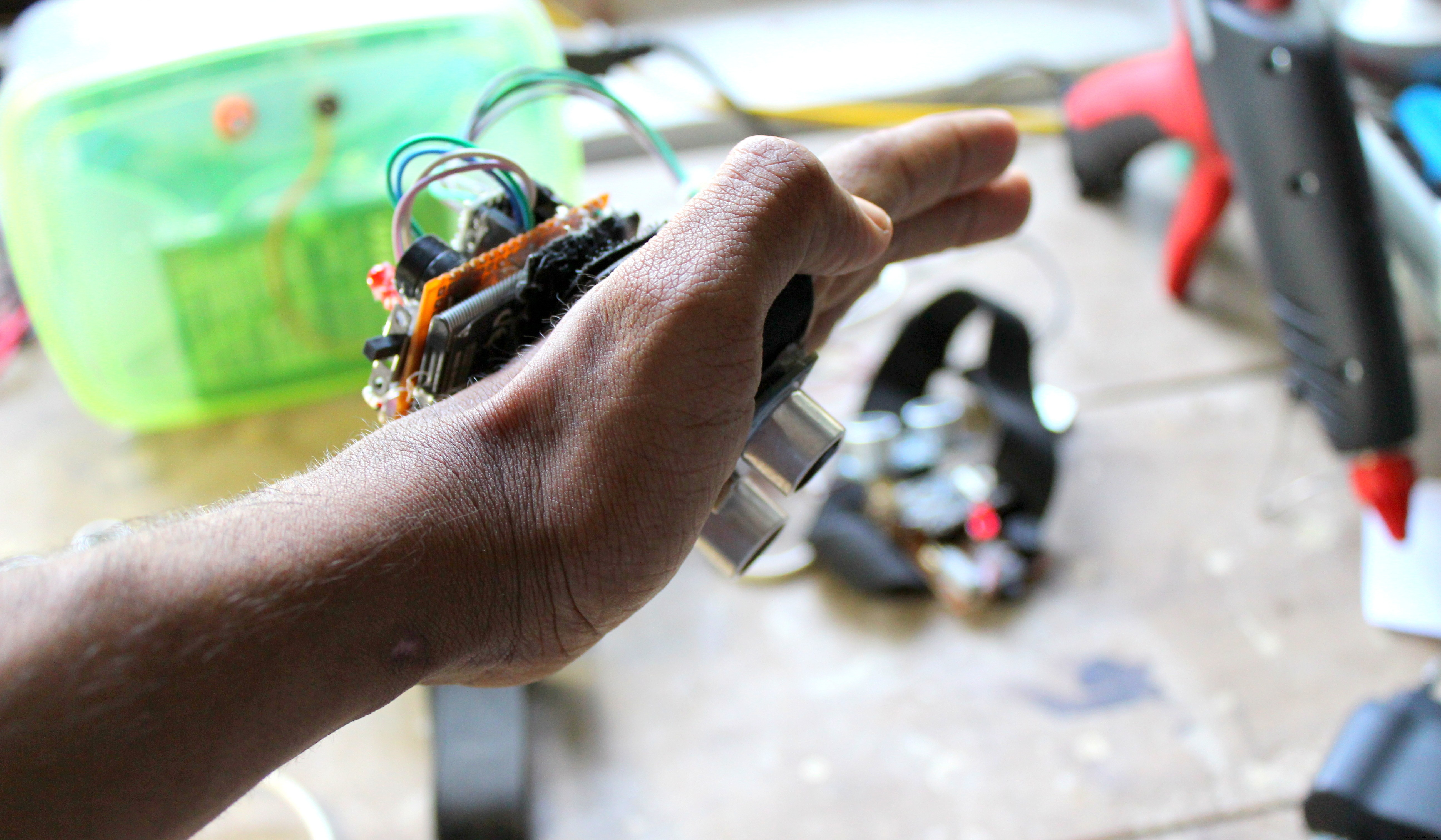
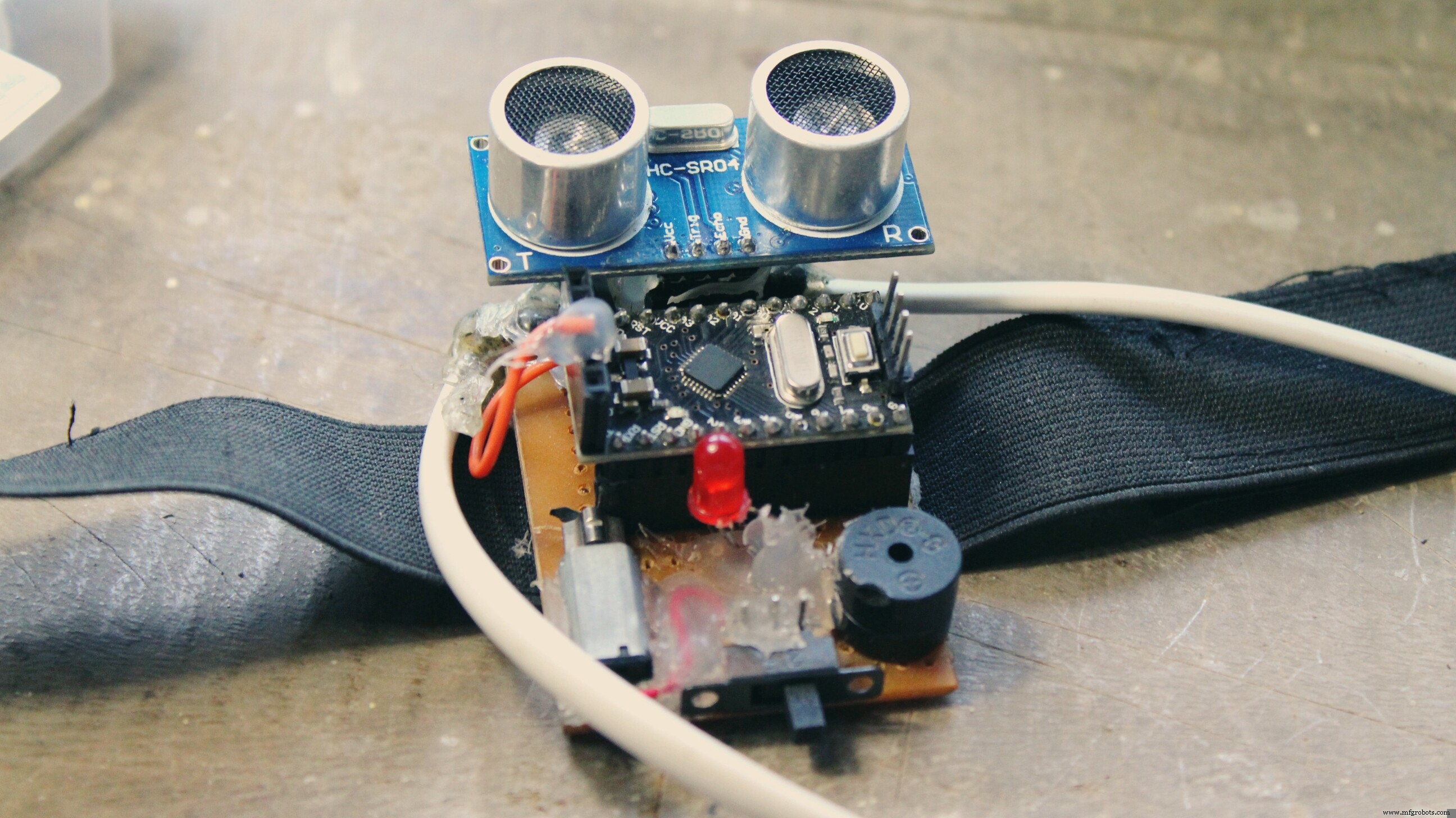
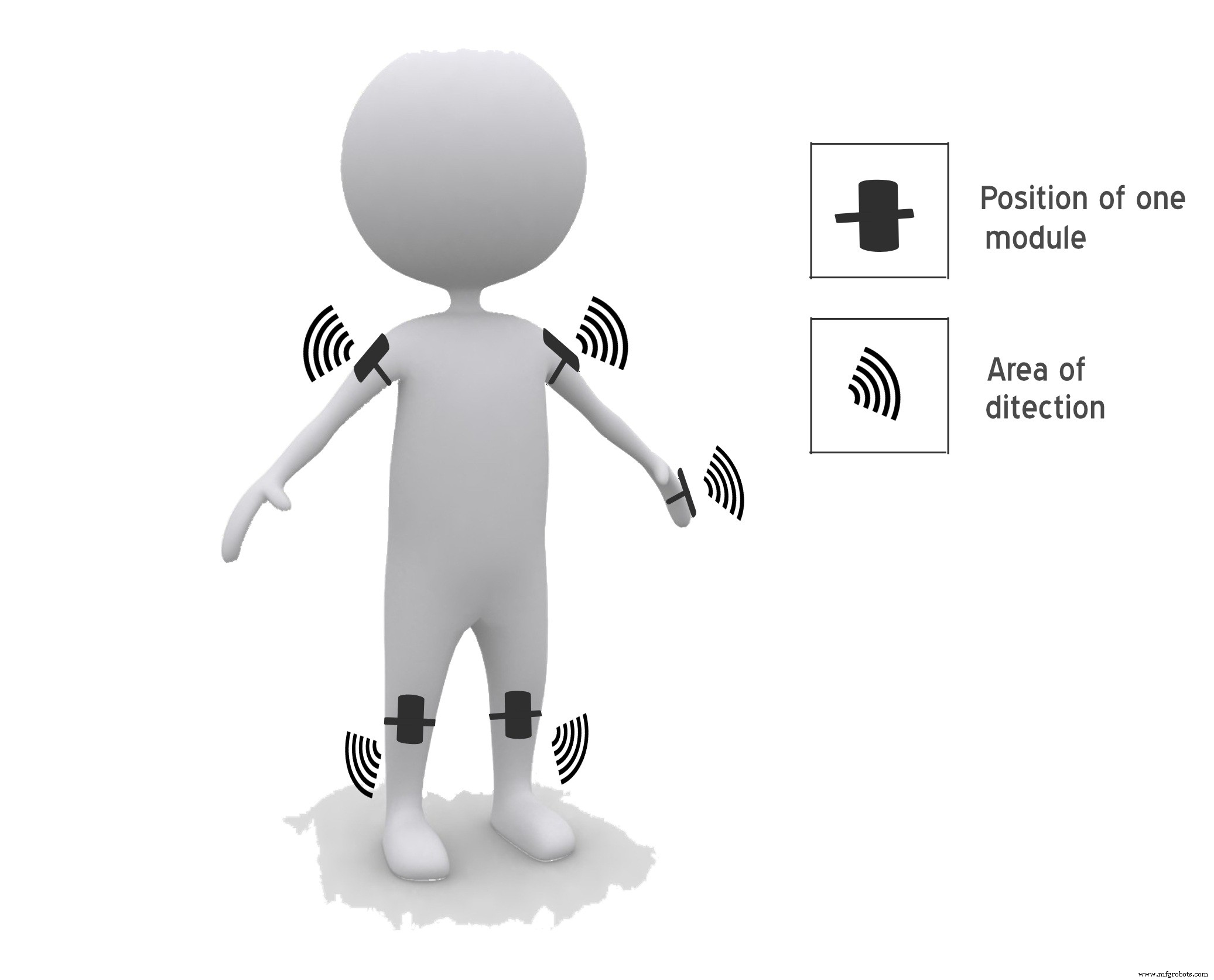
Projetei um dispositivo vestível especial baseado na placa Arduino que pode ser usado como um pano para cortinas. Este dispositivo está equipado com cinco sensores ultrassônicos, compostos por cinco módulos que são conectados às diferentes partes do corpo. Entre eles, dois para ambos os ombros, outros dois para os joelhos e um para a mão. Usando os cinco sensores ultrassônicos, pessoas cegas podem detectar os objetos em uma visão em cinco dimensões ao redor deles e podem viajar facilmente para qualquer lugar. Quando o sensor ultrassônico detecta um obstáculo, o dispositivo notificará o usuário por meio de vibrações e bipes sonoros. A intensidade da vibração e a taxa de bipes aumentam com a diminuição da distância e este é um dispositivo totalmente automatizado.
Melhorias de recursos:
Todo o projeto pode ser feito em forma de jaqueta, para que o dispositivo não precise ser usado um a um. O uso de placas especialmente projetadas em vez de arduino e sensores ultrassônicos de alta qualidade tornam a resposta mais rápida, o que torna o dispositivo capaz de funcionar em ambientes lotados.
Etapa 3:testado com sucesso com a ajuda de uma pessoa com deficiência visual.

Leia mais sobre isso aqui no Postagem FB de nosso professor de ciências da escola.
Prêmios ganhos por esta inovação.
- 1º preço para prêmio de inovação PPT
- 2º preço na feira de ciências estadual. (Conduzido pelo governo de Kerala)
Etapa 4:prototipagem da ideia - peças usadas
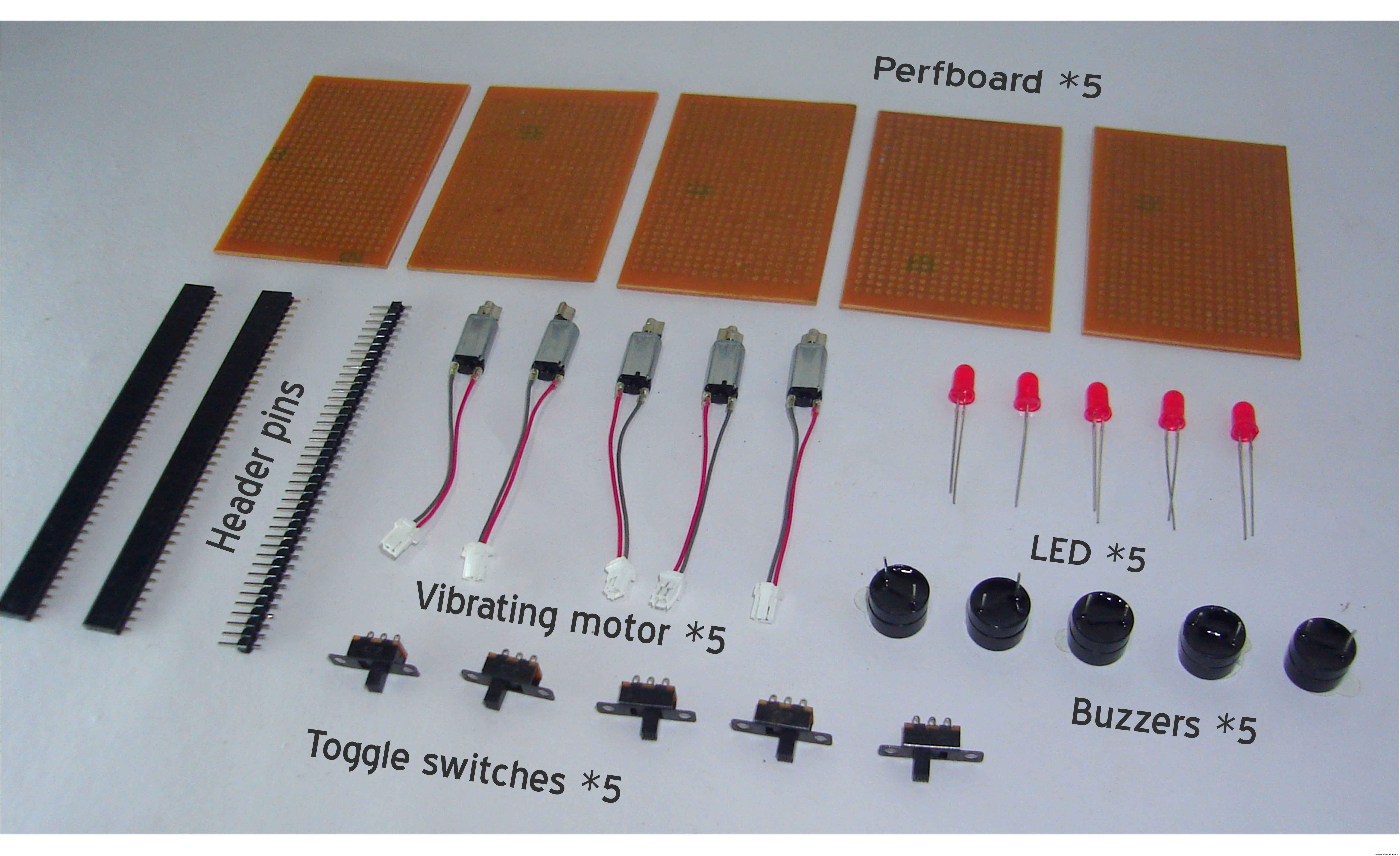

Materiais
- 5 x Arduino pro mini
- 5 x sensor ultrassônico
- 5 x placa Pref
- 5 x motor vibratório
- 5 x campainhas
- 5 x LEDs vermelhos
- 5 x interruptores
- Alfinetes masculinos e femininos
- 4 x cabo jumper
- Um banco de potência
- Uma bateria velha de 3,3 volts
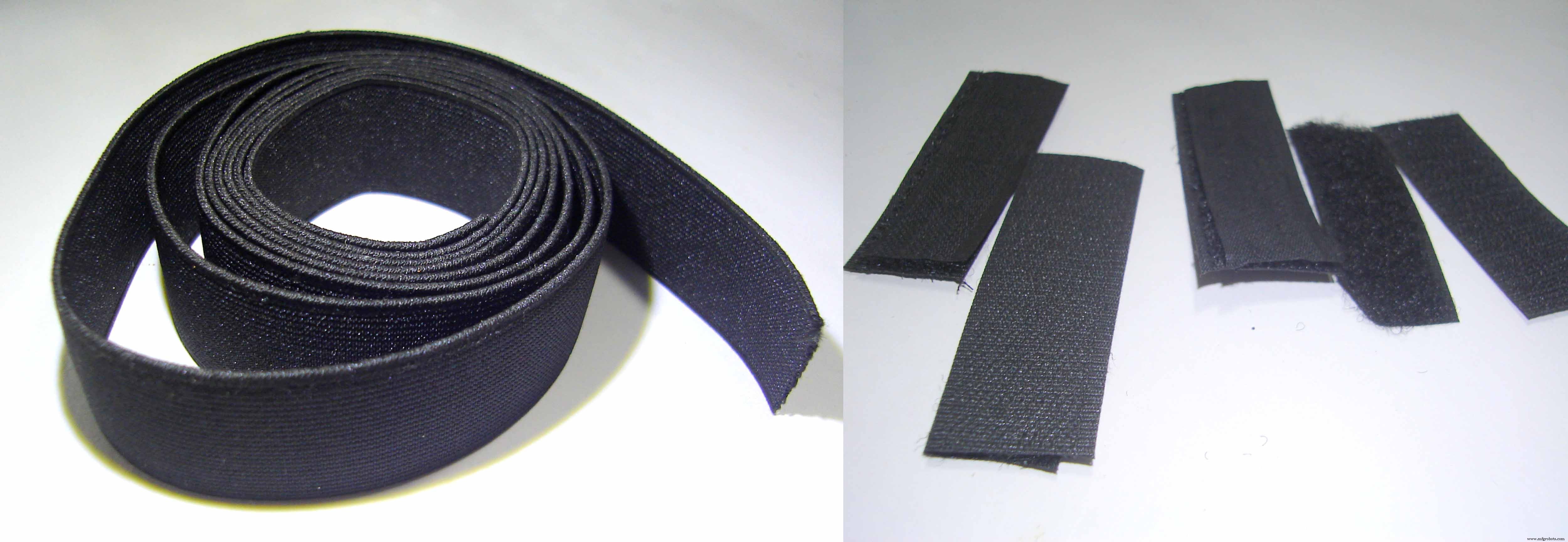
- Alguns elásticos e adesivos (para fazer uma faixa para usar)
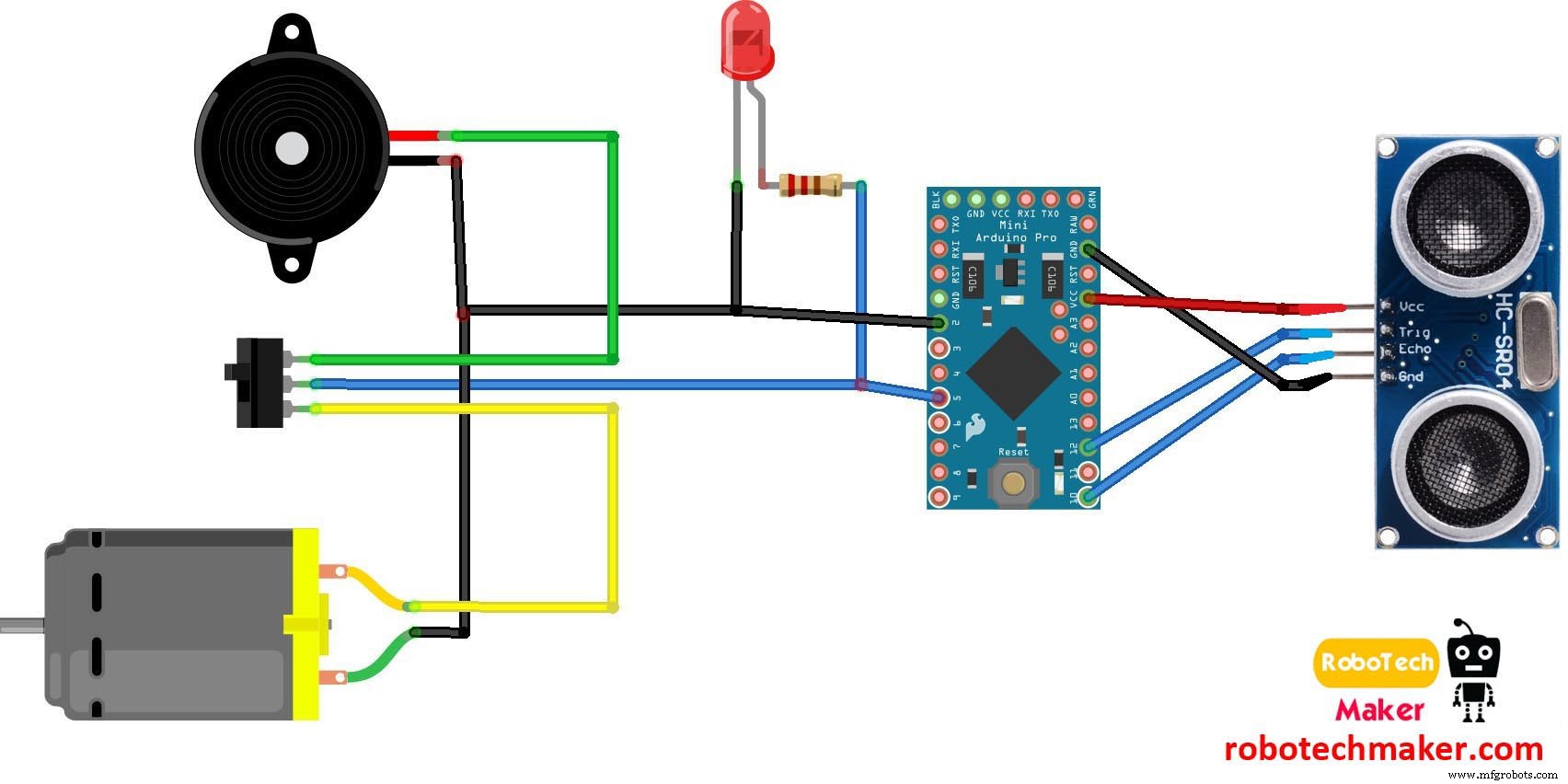
Etapa 5:Diagrama de circuito
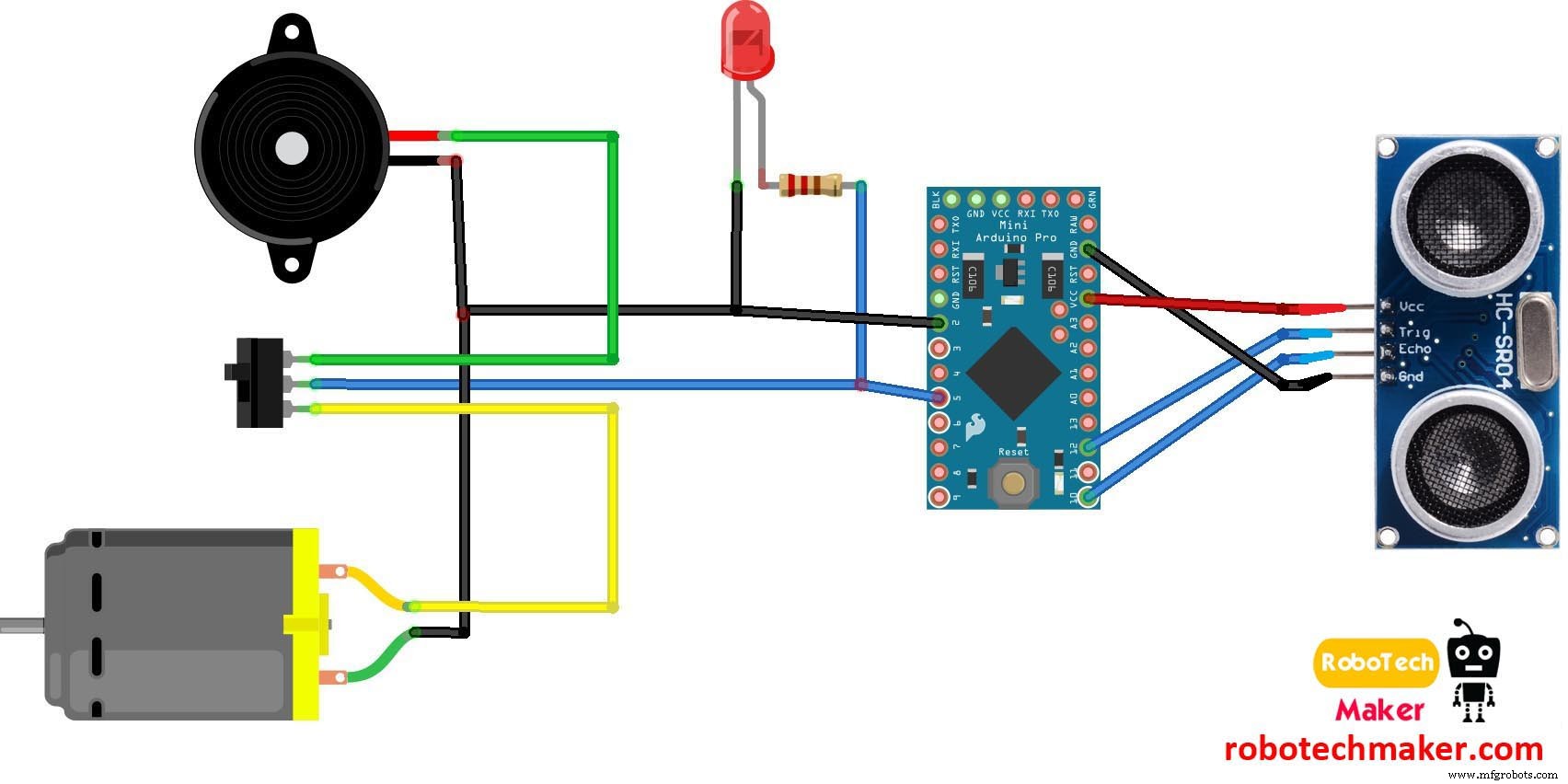
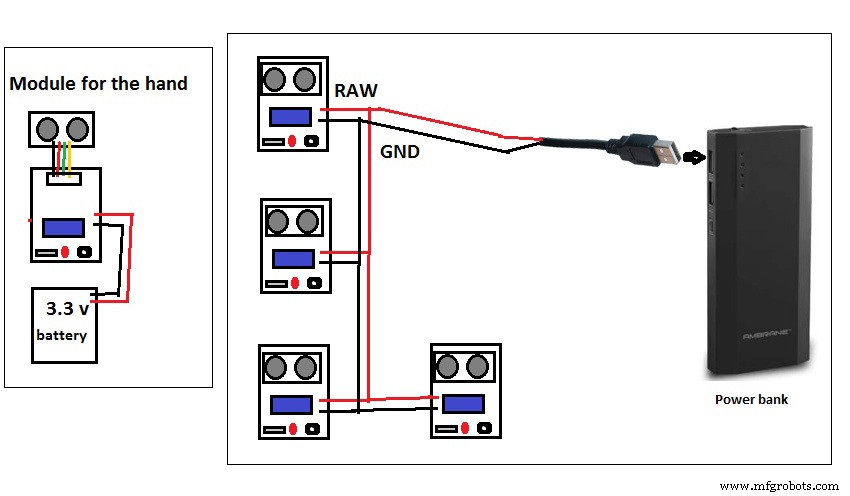
Instruções de fiação.
- Terra do LED, campainha e motor de vibração para GND do Arduino
- + ve de LED e perna do meio da chave para o pino 5 do Arduino
- + ve do Buzzer para a primeira etapa da troca
- + ve do motor de vibração para a terceira perna do interruptor
- Sensor ultrassônico
- Pino VCC do sensor ultrassônico - VCC do pino Arduino
- Pino GND do sensor ultrassônico - GND do pino Arduino
- Trig do pino do sensor ultrassônico - pino 12 do Arduino
- Pino do sensor ultrassônico Eco - Arduino PIN 12
A opção usada aqui é para selecionar o modo. (campainha ou modo de vibração.)
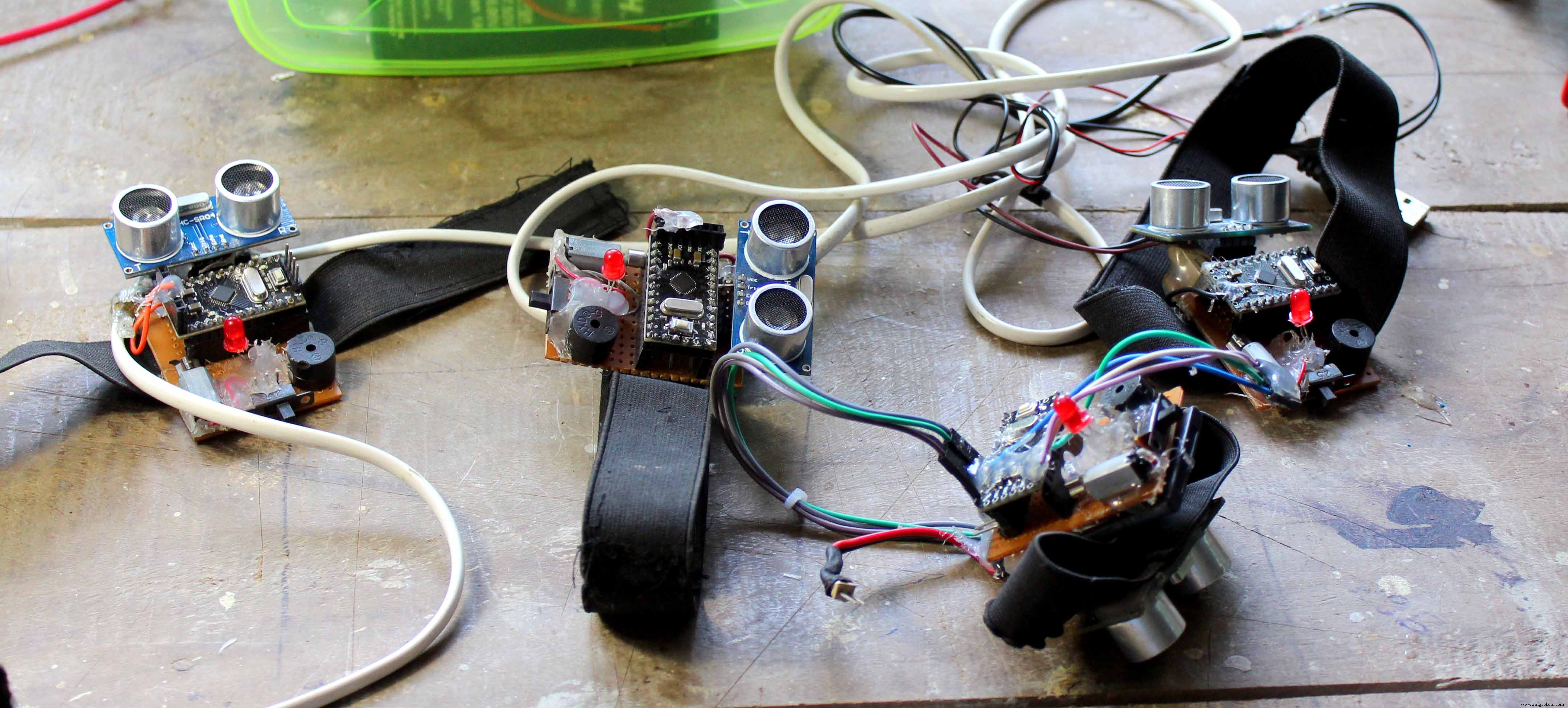
Figura 2 - Ligando os módulos - Conecte o 4 arduino pro mini a um pino USB macho e conecte a um banco de energia. Para o módulo na mão, use uma pequena bateria de lítio.
Etapa 6:Fazendo os módulos
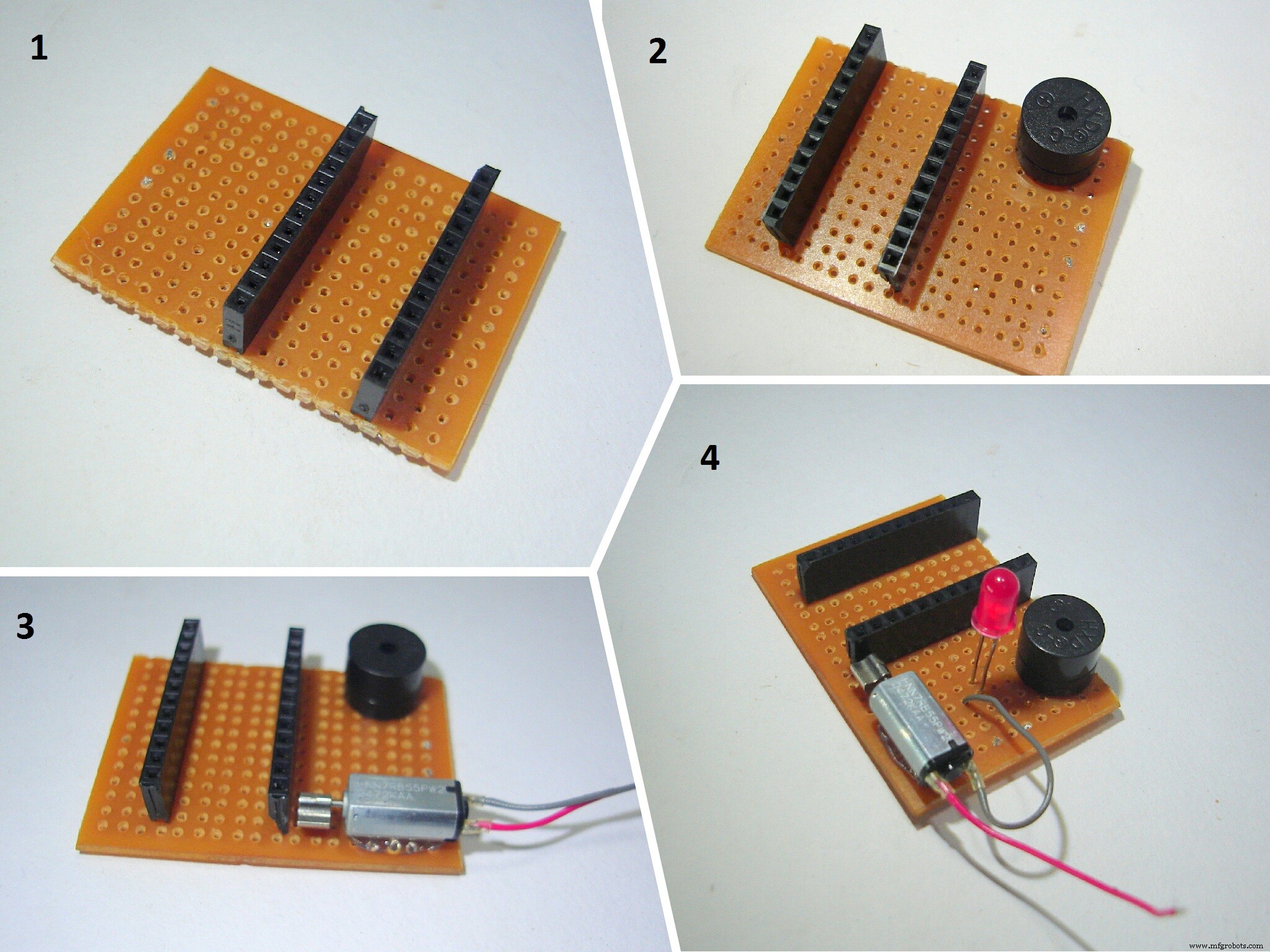
- Primeiro corte a placa pref em uma dimensão de 5 X 3 cm e solde os conectores fêmeas do Arduino à placa.
- Em seguida, solde a campainha.
- Em seguida, conecte o motor vibratório usando a pistola de cola e os fios de solda nele.
- Em seguida, conecte o LED.
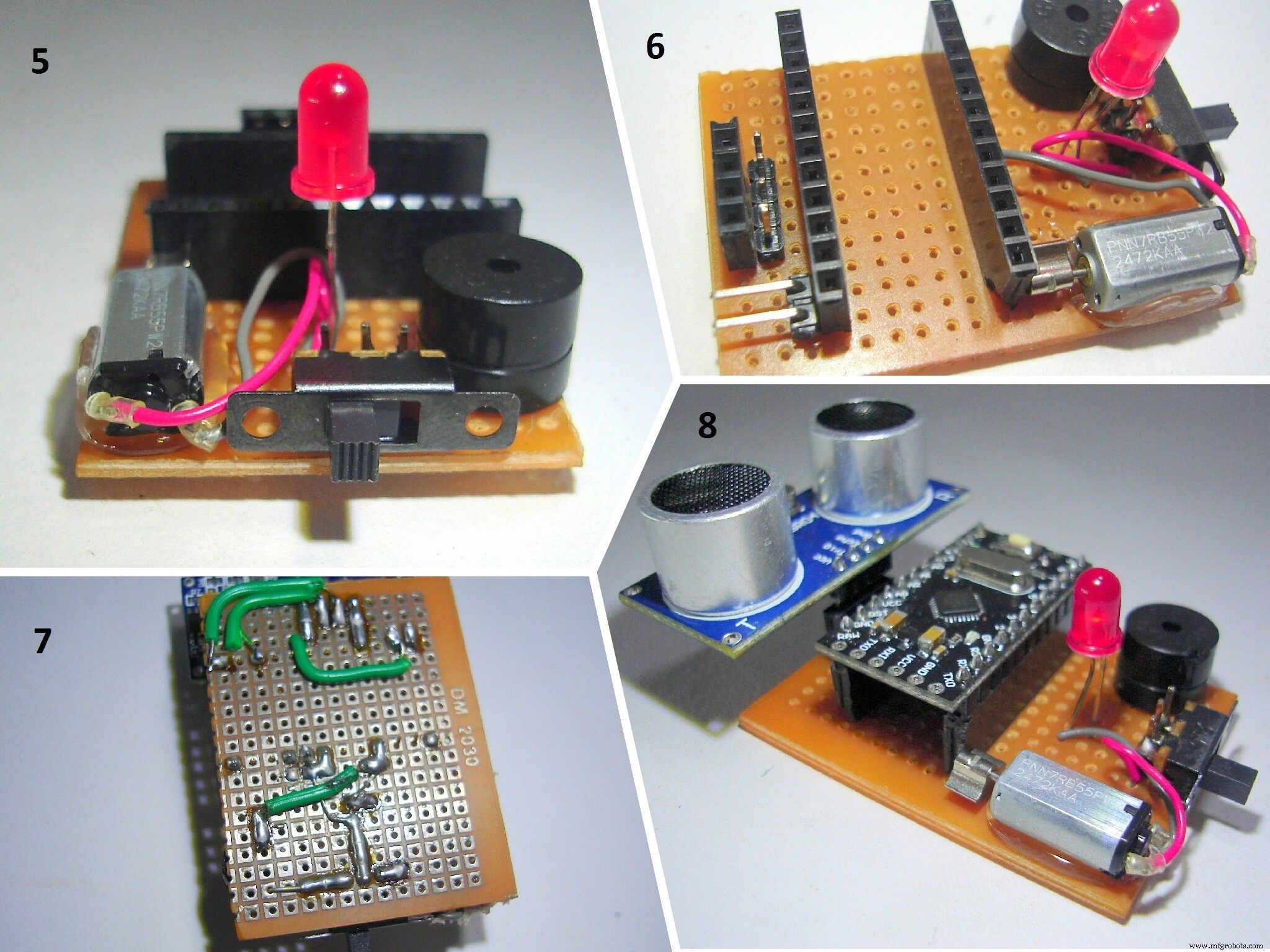
- Em seguida, conecte o switch.
- Em seguida, conecte os pinos de cabeçalho para sensores ultrassônicos e para entrada de bateria.
- Em seguida, solde tudo conforme mostrado no diagrama do circuito.
- Agora conecte o Arduino e o sensor ultrassônico à placa
Conecte também o elástico a todos os módulos.
Mais 3 módulos devem ser feitos da mesma maneira que descrevemos acima, mas para o que está na mão, há uma pequena diferença. visite a próxima etapa antes de fazer o último módulo.
Etapa 7:Código + Fabricação do Módulo para a Mão
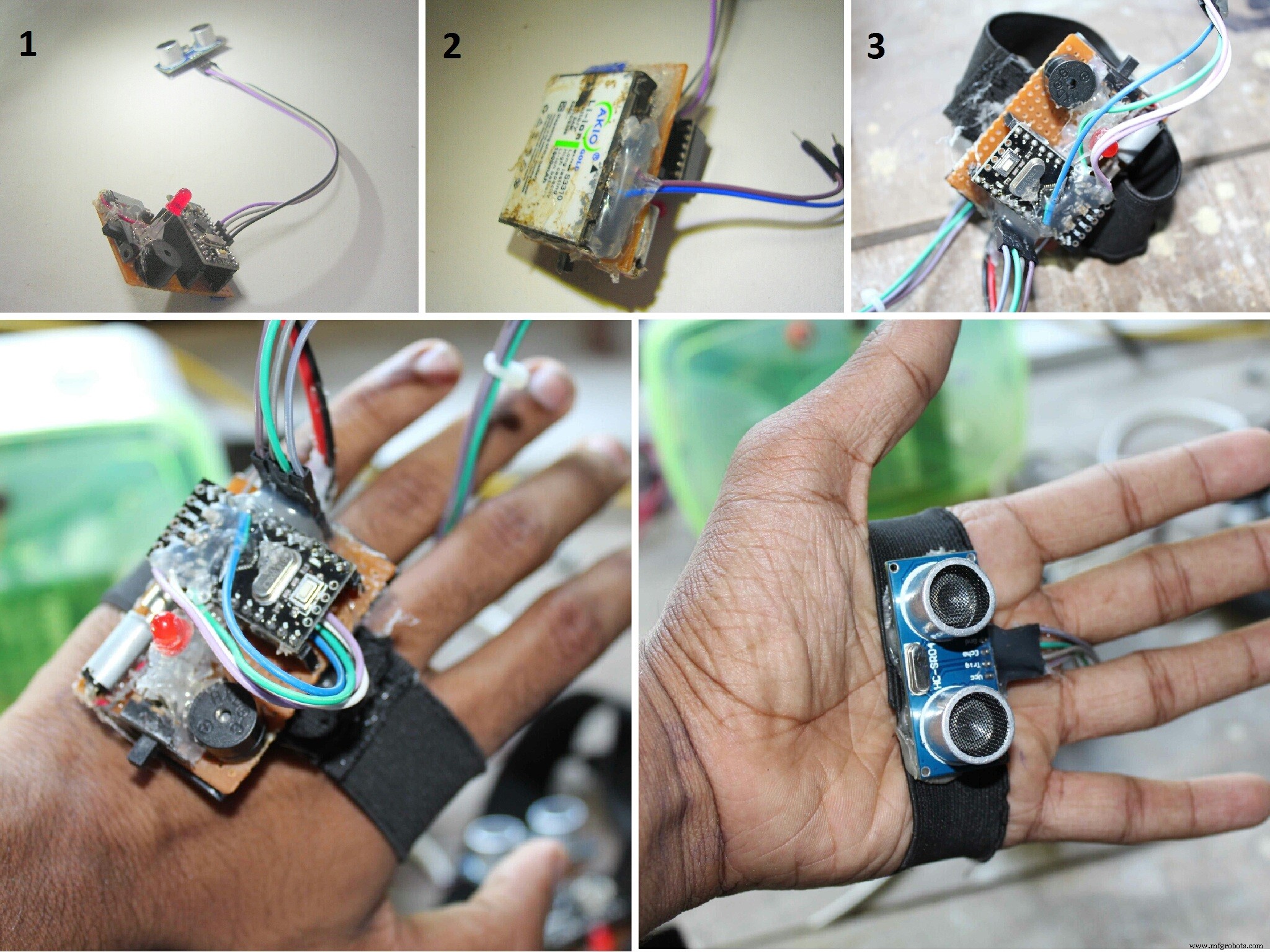
- Conecte o sensor ultrassônico à placa usando cabos de 4 jumpers.
- Em seguida, conecte uma bateria móvel de 3,7 volts a este módulo.
- Em seguida, conecte o elástico conforme mostrado na figura.
Por fim, faça o upload do código para cada placa Arduino e alimente os outros 4 módulos usando um banco de energia.
Código usado no Arduino:
// VISITE:www.robotechmaker.com const int pingTrigPin =12; // Gatilho conectado ao PIN 7 const int pingEchoPin =10; // Eco conectado yo PIN 8 int buz =5; // Buzzer para PIN 4 void setup () {Serial.begin (9600); pinMode (buz, OUTPUT); } loop vazio () {longa duração, cm; pinMode (pingTrigPin, OUTPUT); digitalWrite (pingTrigPin, LOW); atrasoMicrosegundos (2); digitalWrite (pingTrigPin, HIGH); atrasoMicrosegundos (5); digitalWrite (pingTrigPin, LOW); pinMode (pingEchoPin, INPUT); duração =pulseIn (pingEchoPin, HIGH); cm =microssegundosToCentímetros (duração); if (cm <=50 &&cm> 0) {int d =map (cm, 1, 100, 20, 2000); digitalWrite (buz, HIGH); atraso (100); digitalWrite (buz, LOW); atraso (d); } Serial.print (cm); Serial.print ("cm"); Serial.println (); atraso (100); } longos microssegundosToCentímetros (longos microssegundos) {return microssegundos / 29/2; } Third_eye_for_blinds.ino Código
- Código usado no arduino
Código usado no arduino C / C ++
// VISITE:www.robotechmaker.com const int pingTrigPin =12; // Gatilho conectado ao PIN 7 const int pingEchoPin =10; // Eco conectado yo PIN 8 int buz =5; // Buzzer para PIN 4 void setup () {Serial.begin (9600); pinMode (buz, OUTPUT); } loop vazio () {longa duração, cm; pinMode (pingTrigPin, OUTPUT); digitalWrite (pingTrigPin, LOW); atrasoMicrosegundos (2); digitalWrite (pingTrigPin, HIGH); atrasoMicrosegundos (5); digitalWrite (pingTrigPin, LOW); pinMode (pingEchoPin, INPUT); duração =pulseIn (pingEchoPin, HIGH); cm =microssegundosToCentímetros (duração); if (cm <=50 &&cm> 0) {int d =map (cm, 1, 100, 20, 2000); digitalWrite (buz, HIGH); atraso (100); digitalWrite (buz, LOW); atraso (d); } Serial.print (cm); Serial.print ("cm"); Serial.println (); atraso (100); } longos microssegundosToCentímetros (longos microssegundos) {retornar microssegundos / 29/2; } Esquemas
Meça a freqüência cardíaca e SpO2 com MAX30102
nRF24L01 – Como Funciona, Interface Arduino, Circuitos, Códigos
Processo de manufatura
- Componentes para atualizações de software baseado em nuvem na IoT
- Os melhores acessórios para o seu Raspberry Pi
- VISÃO:Para cegos
- Fixadores de plástico da Craftech usados em produtos para cegos
- Componentes de plástico:pavimentando o caminho para a eficiência automotiva
- Sensor de temperatura múltipla
- Controle de ferro de solda DIY para 862D +
- CoroFence - Detector Térmico🖖
- Obrigado pelas lembranças!
- Materiais para componentes de Invar 36