


O que é um manipulador robótico? Um guia

Todas as partes de um robô desempenham um papel em suas operações e determinam o tipo de tarefas para as quais ele pode ser usado. Portanto, ter um conhecimento profundo de tais peças seria o primeiro passo para escolher o robô industrial certo para suas necessidades. Embora haja muitas partes a serem consideradas, talvez seja benéfico começar com uma das principais; um manipulador robótico.
Índice
O que é manipulação robótica?

Um robô é uma máquina programada para executar automaticamente tarefas específicas de forma previsível. Para fazer isso, ele precisa manipular objetos e movê-los ou impactá-los por meio de ações como soldagem ou perfuração. É esse manuseio ou procedimentos realizados em objetos que são chamados de manipulação robótica. Essa definição, portanto, nos dá contexto para definir os manipuladores robóticos.
Um manipulador robótico é uma estrutura semelhante a um braço unida ao corpo de um robô e é usada para executar tarefas. Um robô sem manipulador seria o equivalente a uma pessoa realizando uma tarefa com as mãos amarradas nas costas, simplesmente não é viável. É, de fato, por essa razão que os manipuladores robóticos também são conhecidos como braços de robô.
Em que consistem os manipuladores de robôs?
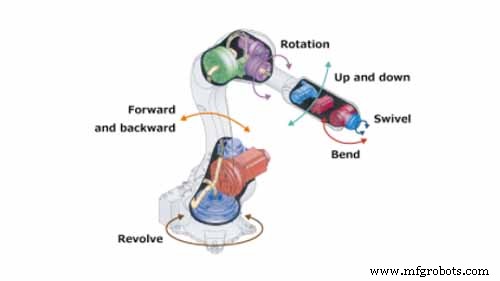
Fonte:Kawasaki
Os manipuladores de robôs consistem em uma série de juntas e links fundidos em sua estrutura interna. Do lado de fora, o braço do manipulador robótico apenas parece ser montado no robô. No entanto, a série de juntas e ligações vão mais além no corpo do robô para prendê-los. Isso garante que o robô e o manipulador trabalhem juntos em movimentos fluidos coordenados.
Links são componentes rígidos que mesclam diferentes partes de um robô. Embora sua rigidez forneça uma estrutura firme, seria difícil para as partes do robô se moverem durante as tarefas. Como resultado, as juntas são adicionadas aos links para facilitar a flexibilidade. As juntas são componentes móveis que deslizam uns contra os outros para facilitar o movimento linear, rotativo ou revolucionário das peças do robô. Eles são construídos e funcionam da mesma maneira que um cotovelo ou joelho humano.
Manipuladores de robôs em robôs diferentes

Fonte:www. brainkart.com
Os tipos e o número de juntas que um robô manipulador possui determinam seus graus de liberdade, a forma de seu envelope de trabalho e como ele pode ser aplicado. Isso, por sua vez, determina como um robô é categorizado. Para ilustração, vamos examinar diferentes tipos de robôs e as estruturas de seus manipuladores robóticos.
Robô cartesiano- seus manipuladores são interligados por meio de 3 juntas prismáticas perpendiculares entre si e fornecem apenas movimentos de deslizamento lineares. Como resultado, um robô cartesiano é classificado como um robô de 3 eixos e tem um envelope de trabalho geométrico.
Robô Polar- o braço e o corpo de um robô polar são unidos por meio de uma junta de rotação. Este tipo de junta permite movimentos circulares que permitem que o braço do robô polar se mova dentro de 3 eixos em um sistema de geometria polar.
Robô cilíndrico- um braço de robô cilíndrico opera usando uma junta rotativa na base e uma junta linear que permite que ele se mova ao longo do eixo vertical. A configuração dessas juntas permite que o manipulador se alongue e retraia, mas seu envelope de trabalho ainda é bastante limitado a uma pequena forma cilíndrica.
Robô SCARA - as juntas em um robô SCARA são rotativas e facilitam seus movimentos ao longo dos eixos XY enquanto permanecem rígidas no eixo Z. Por as juntas serem de plano horizontal, os robôs SCARA possuem amplos envoltórios de trabalho em formato semicircular.
Robô Articulado - um robô articulado tem os manipuladores mais flexíveis entre todos os outros robôs. O braço do manipulador robótico está ligado ao corpo do robô por uma articulação rotativa, enquanto o cotovelo e outras partes do braço são ligados por meio de articulações rotativas. As juntas de rotação permitem que o braço role, lance e guarde, criando um robô de 6 eixos.
Aplicativos de manipuladores robóticos
A flexibilidade de vários manipuladores robóticos pode ser aproveitada para automatizar processos em diferentes setores. Exemplos de tal aplicação incluem:
Cirurgia robótica- nesta aplicação, um manipulador robótico articulado é equipado com instrumentos cirúrgicos como efetores finais. É controlado remotamente por um cirurgião para executar as manobras cirúrgicas.
Escolha e coloque - esta é uma aplicação industrial comum em que robôs manipuladores são aplicados para tarefas repetitivas de coleta e colocação, como embalagem de mercadorias.
Montagem de PCB - neste caso, um manipulador robótico substitui as mãos de um trabalhador humano para montar micropeças em uma placa de PCB com alta precisão e velocidade.
Conclusão
É seguro dizer que o significado do manipulador robótico na robótica vai além de apenas a função. Vai além para definir a estrutura e como um robô pode ser aplicado. Manipuladores de qualidade de um renomado fabricante de braço robótico seria, portanto, um investimento valioso para quem se aventura na robótica.
Robô industrial
- Quais indústrias e empresas usam robôs
- Robôs Industriais - O Guia Definitivo
- O que é automação de processos robótica e suas vantagens
- O guia definitivo sobre soldagem robótica na manufatura
- Braço robótico:como é feito?
- Robótica na Manufatura Automotiva
- Sistema de depósito do robô:o que é e como é usado
- M2M ou comunicação máquina a máquina, o que é?
- Termografia, o que é e para que serve
- Indústria 4.0, o que envolve?