


Os chipsets de radar de imagem 4D aprimoram a identificação do objeto
O radar está ficando quente, especialmente com os avanços que prometem identificação / classificação de objetos e maior resolução de latitude - algo que os radares tradicionais não podiam fazer. Com essas inovações, os radares estão emergindo como o sensor mais procurado entre as montadoras e os níveis 1 que desenvolvem veículos altamente automatizados.
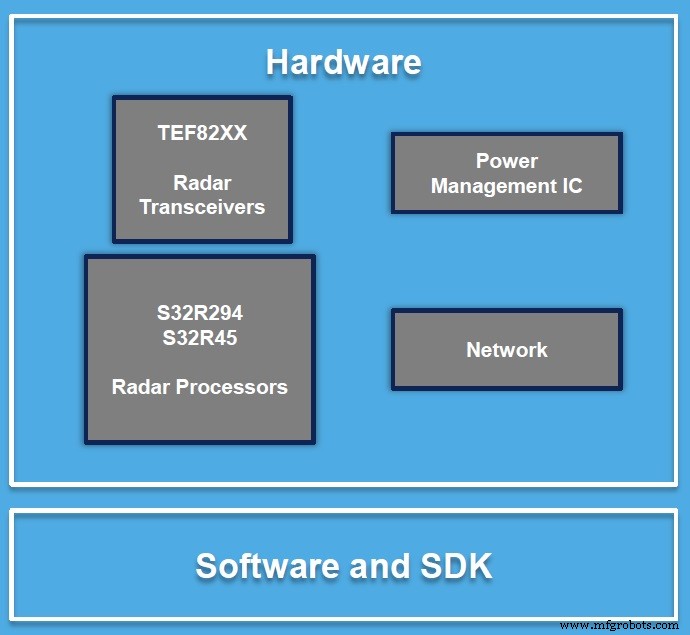
Solução de sistema de radar (Fonte:NXP)
Respondendo às altas expectativas da indústria automotiva, a NXP Semiconductors anunciou que está fazendo a amostragem de um conjunto de novos chipsets de sensores de radar, consistindo no processador de radar S32R45 da empresa e novos transceptores de 77 GHz chamados TEF82xx.
A NXP, que foi pioneira em radares RF CMOS com seu primeiro chip de radar chamado “Dolphin” cinco anos atrás, tem sido um fornecedor líder de soluções de radar automotivo.
Os sensores de imagem 4D da NXP podem medir não apenas o alcance e a velocidade, mas também "elevação, direção e ângulo de chegada, enquanto identifica objetos em uma resolução muito maior", explicou Torsten Lehmann, vice-presidente executivo e gerente geral de processamento de radiofrequência, durante uma entrevista com o EE Times . Com o radar de imagem 4D que pode compreender não apenas os planos horizontais, mas também verticais, um veículo pode, por exemplo, determinar se deve dirigir "por baixo" ou "sobre" um objeto, disse Lehman.
“Imagine uma cena em que um veículo está dirigindo a 80 quilômetros por hora em uma rodovia, enquanto uma motocicleta - um pequeno objeto com baixa refletividade - está vindo de trás a 200 quilômetros por hora”, disse ele. Ao contrário das câmeras e dos lidars, esses novos radares aprimorados podem identificar a motocicleta, inicialmente afastada, e reconhecer que esses dois objetos estão se movendo em duas velocidades diferentes, explicou Lehmann.

(Fonte:NXP)
Até o momento, o radar tem sido o único sensor capaz de operar a mais de 300 metros, reconhecendo objetos em alta velocidade. Nem câmeras, nem lidars podem lidar com tanta distância e velocidade.
Com o surgimento de radares de imagem de alta resolução, muitos fornecedores de radar, incluindo NXP, estão ansiosos para elevar os radares como o único sensor de alta velocidade capaz de funcionar nas piores condições climáticas e de iluminação.
Escalabilidade
A NXP dificilmente está sozinha ao falar sobre radar de imagem 4D. A Continental anunciou em setembro passado que está usando Xilinx FPGAs para implantar o primeiro radar de imagem 4D pronto para produção da indústria automotiva, com previsão de entrega em veículos de passageiros em 2021.
Dada a experiência de produção de volume da NXP com transceptores CMOS RF de 77 GHz e seu processador de radar S32R45, a NXP afirma que seu conjunto de chips de radar de imagem 4D pode reduzir substancialmente o custo e a eficiência energética em comparação com a implementação de FPGA de uso geral. A NXP, no entanto, se absteve de especificar o grau de redução de custo / energia.
Phil Magney, fundador e presidente da VSI Labs, nos disse:“Há alguns anos temos acompanhado de perto esse espaço. Ironicamente, a primeira vez que ouvi sobre isso foi em uma apresentação do NXP alguns anos atrás. Naquela época, ele foi apresentado como um potencial concorrente para lidar, já que os novos radares poderiam produzir uma nuvem de pontos. ”
Obviamente, a NXP está traçando seu lançamento de radar de imagem 4D há algum tempo.
Mas o tom da NXP está mudando. Em vez de apenas falar sobre sua capacidade de produzir nuvens de pontos, a ênfase da empresa agora mudou para a escalabilidade oferecida por um conjunto de suas novas soluções de radar.
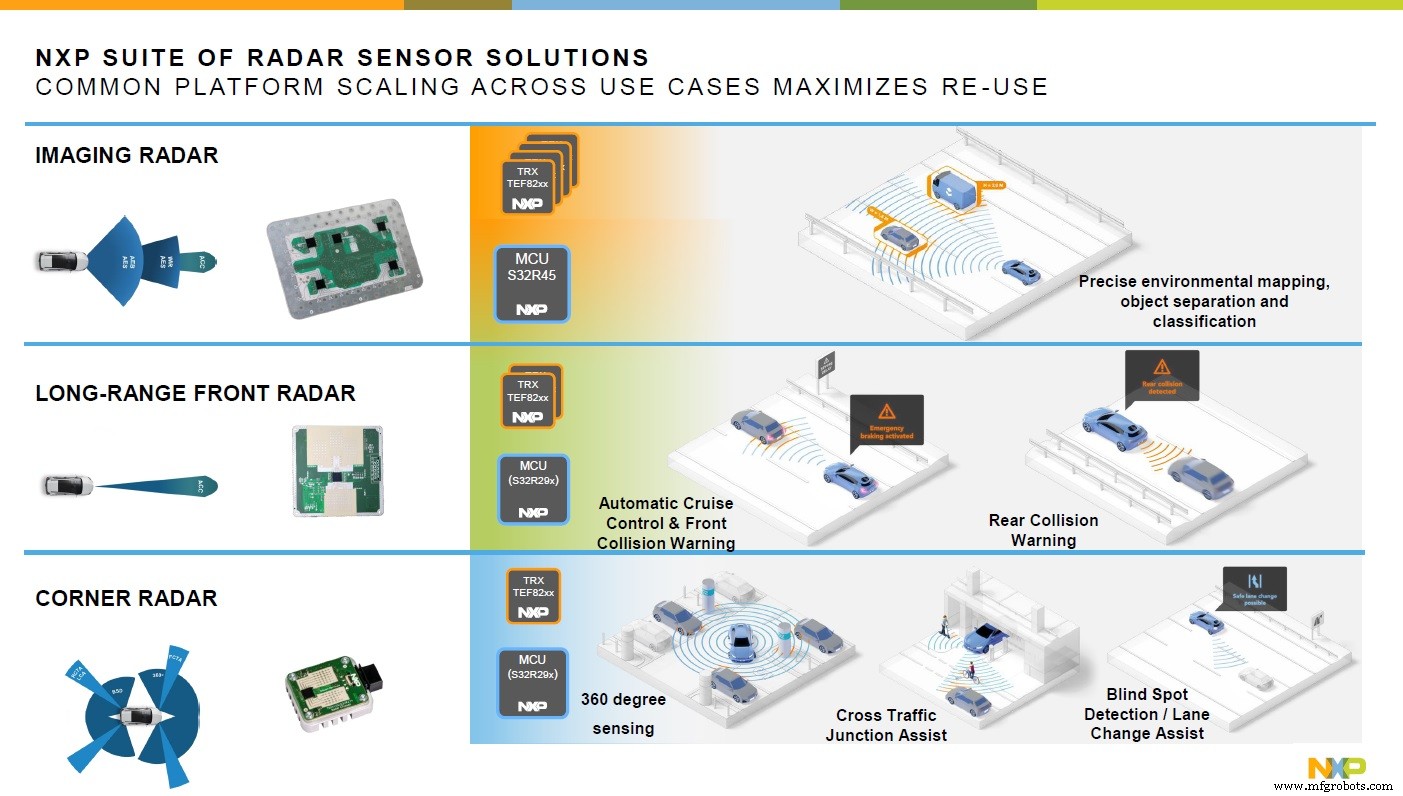
O NXP agora apregoa “uma plataforma comum que se adapta a diferentes casos de uso”, variando de radar de canto e radar frontal de longo alcance a radar de imagem. Isso é importante para uma indústria que busca tecnologias para atender aos requisitos do Programa de Avaliação de Novos Carros (NCAP), exigindo melhor desempenho no ponto cego e recursos de frenagem automática de emergência. Embora o NCAP não especifique as tecnologias de sensor preferenciais, os fabricantes de automóveis - pressionados para atender aos requisitos do NCAP - estão comprando tecnologias de radar melhores que podem detectar objetos nos cantos e na frente, explicou Lehmann.
clique para ver a imagem em tamanho real
(Fonte:NXP)
Para detecção de ponto cego e assistência de faixa em veículos de nível 1 e 2, uma combinação do único transceptor TEF82xx da NXP e processador de radar S32R45 funciona. A adição de controle de cruzeiro automático e aviso de colisão dianteira e traseira para carros L2 e L3 exigiria dois transceptores em vez de um. Para a separação e classificação de objetos exigidas por veículos autônomos L4 e L5, os OEMs podem combinar quatro transceptores em cascata com um processador de radar.
O segredo é que, durante a transição para uma automação superior, os fabricantes de automóveis que devem atender a diversas marcas e modelos devem ser capazes de usar uma única plataforma projetada para reutilizar software e hardware.
Transição para radar de imagem 4D
A evolução dos radares automotivos, no entanto, é confusa pelo jargão de marketing.
Os radares tradicionais - às vezes chamados de 2D - passaram a ser os radares de imagem. “O radar de imagem cria essencialmente uma matriz em que a densidade das medições aumenta dramaticamente”, explicou Magney. “O radar 2D tradicional é grosseiro em comparação e produz apenas um único ponto por objeto. Mas um radar de imagem produziria muitos pontos para entender melhor o que está sendo rastreado. ” Resumindo, ele observou, “o radar de imagem produz resolução vertical em que o radar tradicional funciona a partir de um único plano”.
Então, como os radares de imagem 3D e 4D são diferentes?
“Acho que o tempo está sendo usado na quarta dimensão. Eu ouvi isso de algumas outras empresas também e é assim que elas o usam ”, observou Magney. Mas ele acrescentou:“Honestamente, 4D é mais uma campanha publicitária de marketing do que qualquer outra coisa, porque o elemento tempo é derivado do Doppler. Então, se fosse esse o caso, o 2D tradicional poderia ser chamado de 3D. ”
Em outras palavras, o elemento tempo sempre foi crítico para o que os radares oferecem. Ao fazer a mesma pergunta, Lehman da NXP observou que o quarto elemento do sensor de imagem 4D é a "resolução lateral". O radar de imagem 4D capta melhor o ambiente, determinando se um veículo pode voar sob ou sobre um objeto.
Resolução Latitude
“Resolução de latitude mais alta” se traduz em maior resolução vertical, observou Magney. “Isso por si só é um dos recursos mais importantes.”
Essa discussão evoca o caso de Joshua Brown. O sedã Tesla Model S de Brown matou o motorista, colidindo com um trailer cruzando seu caminho na rodovia norte-americana 27A na Flórida em maio de 2016. É amplamente divulgado que o Tesla, equipado com câmeras e radar 2D tradicional, presumiu que o carro poderia passar por baixo do equipamento gigante, e dirigiu direto para ele.

A foto mostra o lado direito do semirreboque. A área em oval vermelho destaca os danos de colisão do Tesla S. de Joshua Brown (Fonte:National Transportation Safety Board)
Um sensor de imagem 4D poderia ter evitado esse acidente fatal? Magney disse:“Sim, este tipo de radar não estaria sujeito a falsos positivos provenientes do radar tradicional. E não teria permitido o acidente de Tesla. ”
Transceptores de alto desempenho e processamento de radar
O novo TEF82xx da NXP - 75 mm x 75 mm - é construído em seu RFCMOS de segunda geração com base na tecnologia de processo de 40 nm. A empresa afirma que pode dobrar o desempenho de RF para detecção aprimorada, em comparação com a versão anterior.
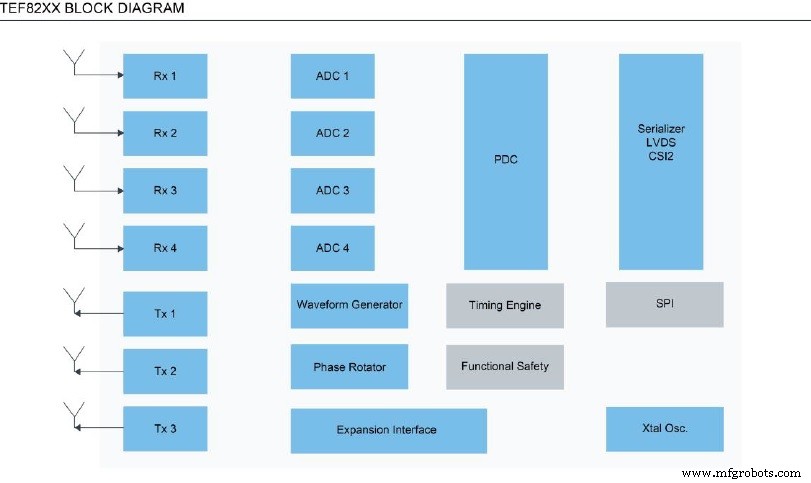
O novo chip transceptor também oferece redução de ruído de fase 4X em torno do alvo, possibilitando uma melhor separação de objetos. Ele vem com um rotador de fase de 6 bits para aplicações de direção de feixe e suporte de modulação MIMO avançado.
O novo radar S32R45 da NXP é construído no processo FinFET de 16 nm. Ele oferece suporte a transceptor em cascata de até 4X para “mapeamento ambiental preciso e compreensão aprimorada da cena” em veículos L4 e L5, afirmou a empresa.
clique para ver a imagem em tamanho real
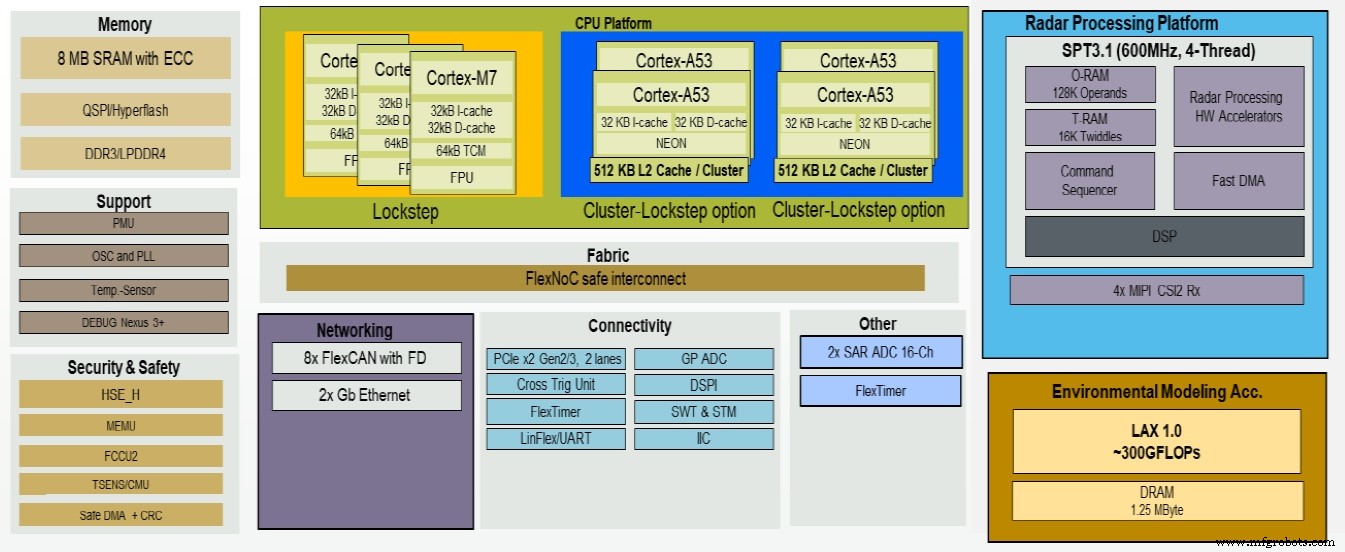
Diagrama de bloco S32R45. (Fonte:NXP)
É importante observar que o S32R45 é capaz de novas acelerações de radar. Mais especificamente, ele oferece um novo “acelerador de radar de álgebra linear” com desempenho de até 64X em comparação com um núcleo ARM A53, de acordo com a NXP. Isso se traduz na execução de “algoritmos de super-resolução de direção de chegada (DoA) e operação MIMO verdadeira, mesmo em condições climáticas adversas”, afirmou a NXP.
Debate renovado:lidar vs. radar
A NXP afirma que seu novo radar de imagem 4D oferece resolução angular inferior a 1 grau. Mas como ele se compara ao lidar?
Lehman observou:“Se você está falando sobre um lidar de alto desempenho - como um tipo de rotação mecânica usado pela Waymo, ele pode produzir muitas nuvens de pontos granulares, uma vez que oferece resolução angular inferior a 0,1 ° ou 0,5 °.” Ele acrescentou, mas tal lidar é “volumoso e custa milhares de dólares”.
Magney observou, “Há um boato de que Tesla está considerando um radar de imagem para a plataforma modelo 3 e isso seria uma boa jogada, porque fornece uma resposta melhor para não usar lidar.” A desmontagem da System Plus Consulting revelou que a Tesla usou o radar 2D da Continental, conforme relatado pelo EE Times .
No entanto, de acordo com Magney, a Tesla mudou da Continental para a Bosch para um alcance maior. Ele explicou que ambos são radares 2D com as limitações dos radares tradicionais. “No que me diz respeito, uma mudança para um radar de imagem por Tesla seria astuta. Entenda que o radar de imagem produz uma nuvem de pontos. Mesmo tendo uma resolução inferior à do Lidar, [ainda] é uma grande melhoria em relação ao radar tradicional ”, disse Magney.
Em resumo, porém, Magney enfatizou:"Não estou prestes a jogar lidar sob o ônibus ainda."
Em sua opinião, lidar tem uma enorme vantagem sobre o radar agora, embora essa lacuna possa estar diminuindo com os novos radares. “Um dos principais aplicativos para lidar é sua capacidade de realizar localização relativa em um mapa de base. Isso é vital para robotáxis urbanos e ônibus e não acho que você poderia substituir LIDAR para esta tarefa. ”
Magney concluiu, “Lidar não irá embora, mesmo com o radar 4D chegando. Em vez de deslocar lidar, você poderia dizer que os novos radares superam algumas das limitações do radar tradicional. ”
Disponibilidade
O novo conjunto de chips de radar da NXP, com amostragem hoje, entrará em produção em volume em 2021. Radar de canto, radar frontal e radar de imagem 4D serão lançados ao longo de vários meses em 2021, mas todos os três estarão disponíveis no segundo semestre, disse Lehman. Ele se recusou a comentar sobre os preços.
>> Este artigo foi publicado originalmente em nosso site irmão, EE Times.
Integrado
- Classe e objeto C#
- Classe Java Singleton
- Apacer revela nova identificação de produto industrial
- Microchip:A solução PolarFire com base em FPGA permite vídeo e imagem em 4K com fator de forma menor
- Kymati desenvolve soluções de radar personalizadas
- Processador de radar de imagem automotiva de 30 fps estreia
- Chip de radar de baixa potência usa redes neurais com pico
- Manhattan Skyline:ARM COM compacto com NXP i.MX 8MM
- congatec:novo módulo SMARC com Mini processador NXP i.MX 8M
- O kit fornece a plataforma de desenvolvimento mmWave