


Cidades inteligentes:o caso para lidar em sistemas de transporte inteligentes
Um aspecto da agenda das cidades inteligentes é a implantação de sistemas de transporte inteligentes. Um projeto piloto usando sensores LIDAR na Agência Municipal de Transporte de São Francisco (SFMTA) demonstrou como LIDAR forneceu uma solução para o piloto de semáforos inteligentes da cidade, uma parte da política Visão Zero de São Francisco.
O objetivo da política Visão Zero da cidade é melhorar a segurança no trânsito, pois estima-se que a cada ano cerca de 30 pessoas perdem a vida e mais de 200 ficam gravemente feridas enquanto viajam nas ruas de São Francisco. O objetivo do piloto de semáforos inteligentes dentro desta estrutura maior era explorar o uso de sistemas de semáforos inteligentes multimodais (MMITSS), comunicação de curto alcance dedicada (DSRC), prioridade de sinal de trânsito (TSP) e preempção de veículo de emergência (EVP ) tecnologia para dar prioridade a veículos de emergência e de trânsito. Além disso, o MMITSS também deve ser capaz de detectar pedestres e bicicletas para fornecer a eles intervalos de avanço, embaralhamento e / ou fases protegidas.
A primeira prova de conceito, que terminou em janeiro de 2020, implantou sensores LIDAR em cinco cruzamentos e demonstrou a capacidade de criar perfis de dados de forma precisa e anônima, com 96% de precisão. A segunda prova de conceito espera adicionar a camada de dados à rede de controle de sinal para permitir a "inteligência" em ITS; isso está em andamento e deve terminar no início de 2021.
Conversamos com duas pessoas envolvidas que lançaram algumas luzes sobre a tecnologia, sua implantação e os resultados obtidos, e aqui apresentamos os destaques das conversas. Primeiro, falamos com o diretor de marketing do provedor de tecnologia de sensor lidar Quanergy, Enzo Signore. Em seguida, nos aprofundamos no projeto de prova de conceito real com Paul Hoekstra, que foi o consultor de execução de estratégia independente para o projeto com SFMTA.
Lidar:rastreamento de IDs de objetos anonimamente
Enzo Signore de Quanergy explica o benefício da tecnologia lidar neste tipo de aplicação, exigindo contagem de pessoas e veículos e gerenciamento de fluxo, e principalmente com a proibição do reconhecimento facial.
A proposta de valor chave para a tecnologia lidar em aplicações como estádios e cidades inteligentes é a capacidade de rastrear anonimamente um objeto viajando por vários pontos sensores. Por exemplo, um carro passaria por muitos cruzamentos ou um pedestre passaria por muitas áreas. O que o Quanergy pode fazer é atribuir um ID a um objeto, e esse ID permanecerá com o objeto durante toda a jornada na área sendo monitorada.
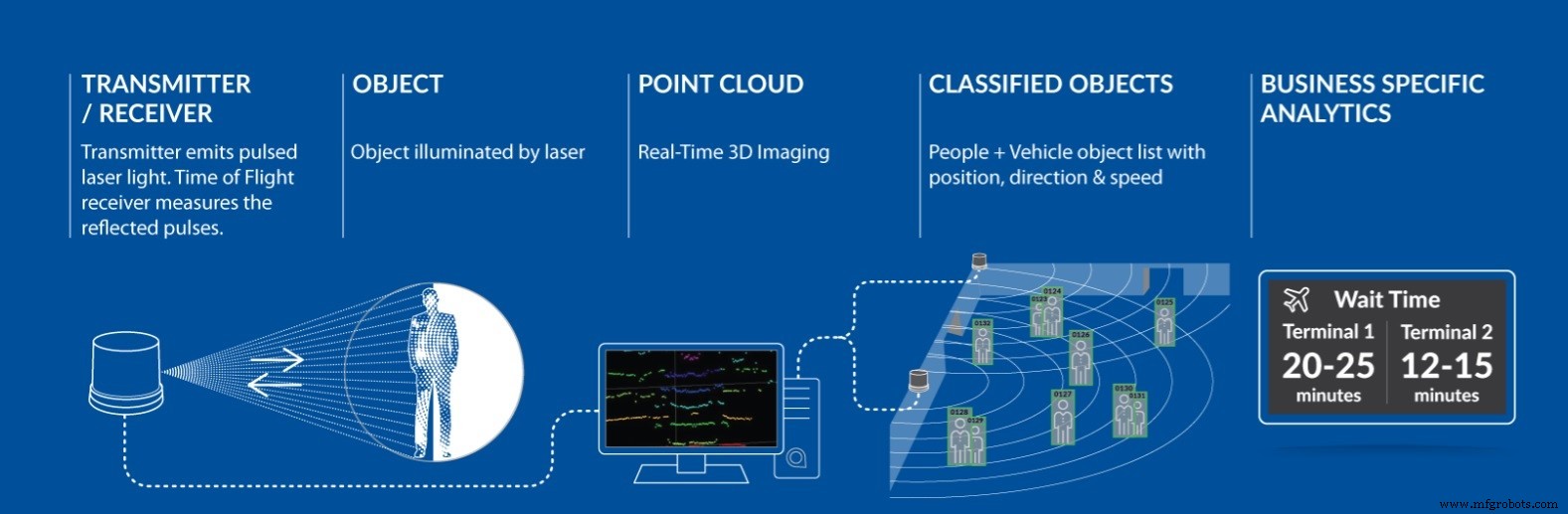
Isso é muito complexo de fazer, porque quando você passa por várias interseções, você precisa de vários sensores e vários servidores para o cálculo de borda. A maioria das tecnologias teria uma visão isolada apenas da área que estão gerenciando e, ao cruzar a fronteira entre uma área e outra, o ID seria perdido e você receberia outro ID. Com essa abordagem, você começa a perder o controle de todo o fluxo de pessoas.
Temos uma tecnologia chamada entrega automática de ID, que vai passar a identidade da pessoa ou do veículo de uma área para outra. Portanto, enquanto tivermos campo de visão, o mesmo ID permanecerá com o objeto. Isso proporciona excelente visibilidade e rastreamento de ponta a ponta. Isso pode ser importante para aeroportos, por exemplo, do meio-fio ao portão, onde você pode otimizar a experiência do passageiro, e para shopping centers e cidades. O único ID para cada indivíduo ajuda a habilitar análises de ponta a ponta.
Os sensores da Quanergy, a série M, fornecem detecção de longo alcance, como o MQ-8, projetado especificamente para aplicações de gerenciamento de fluxo. Aqui está como esses sensores são diferentes. Sensores lidar típicos têm uma configuração de feixe simétrica. Se você montar o sensor na horizontal, normalmente metade do feixe irá para o céu e a outra metade para o solo. Se for montado com 3 metros de altura em um poste de luz de rua olhando para baixo para a visão de pedestres, então, nesta configuração, metade do feixe é desperdiçado.
Em nosso projeto, todas as vigas estão apontando para baixo, o que permite uma cobertura simétrica do solo. Isso significa que não há pontos cegos quando uma pessoa está caminhando no campo de visão. Isso dá a capacidade de rastrear sem interrupção uma pessoa ou veículo em qualquer lugar no campo de visão. Podemos ver um objeto com um alcance de até 70 m (ou seja:15.000 m²). Esta é uma área muito grande que, de outra forma, precisaria de muitas câmeras para obter uma cobertura semelhante. Conseqüentemente, isso reduz o número de sensores e também o custo.
Superando problemas de privacidade relacionados ao reconhecimento facial
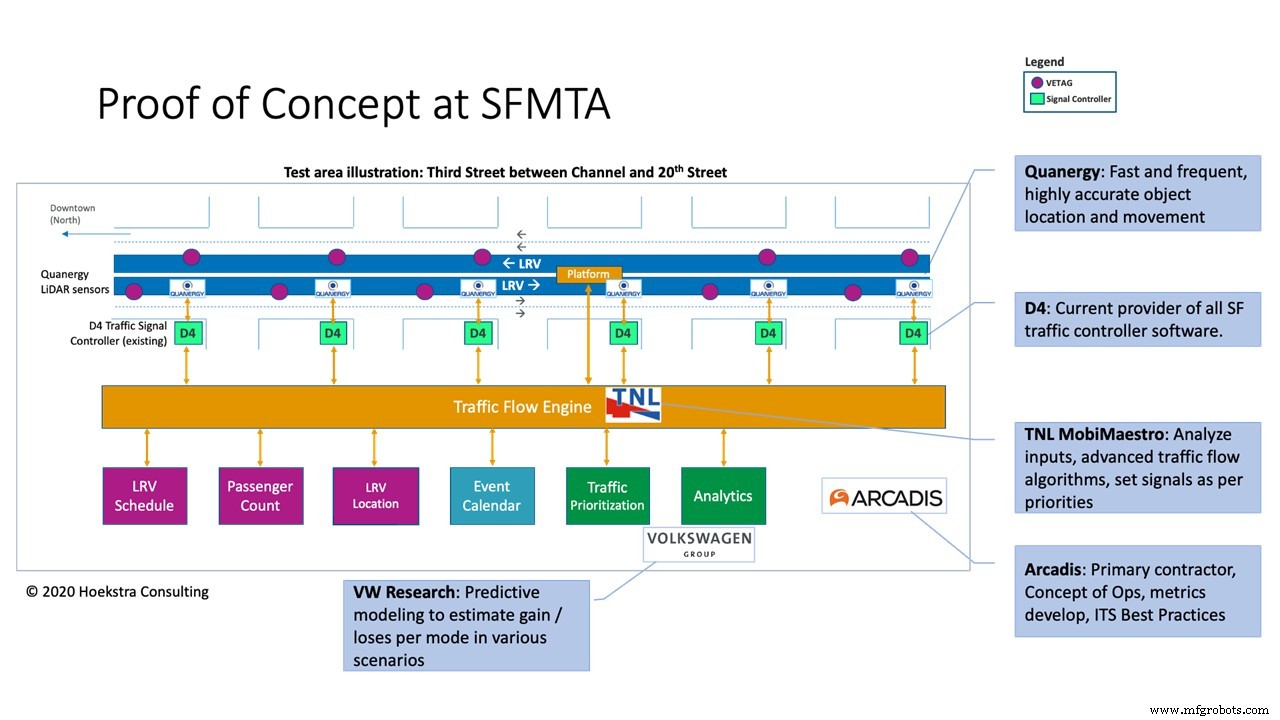
Paul Hoekstra, para SMTA descreve o pensamento por trás da implementação e o resultado da primeira prova de conceito (PoC) ao longo de cinco interseções na 3 rd Rua e planos para expandir a cobertura.
Começamos a trabalhar com SFMTA, Cisco e Quanergy como parceiros neste projeto em abril de 2019. Inicialmente, como parte do pacote Cisco, tínhamos sensores DSRC. Descobrimos que os estávamos usando apenas para ouvir todos os carros no corredor e na rodovia que estávamos percorrendo. Descobrimos que menos de 1% de todos os carros realmente transmitem esse sinal DSRC. A partir dessa perspectiva de caso de uso, a conclusão deve ser que você não pode usar o DSRC para medição de fluxo de tráfego. Simplesmente não é significativo o suficiente para tomar decisões.
Neste momento, concluímos o primeiro (PoC) com sensores Quanergy e agora estamos no meio do segundo PoC.
Com o primeiro PoC, pegamos 20 sensores lidar, os instalamos em cinco interseções na 3 rd Street, perto do novo estádio de basquete inaugurado no ano passado. Tínhamos computação de ponta com Cisco TRX executando o software Quanergy QORTEX. Os dados do lidar passam pela caixa TRX e o software Qortex publica os dados na rede, que vai para o data center, um pequeno cluster VM rodando a plataforma Cisco Kinetic que armazena todas as mensagens - 30 milhões por semana.
Todos os domingos são publicados relatórios sobre ele, um para os veículos, identificando o veículo pelo ID lidar no cruzamento, com um monte de atributos, como hora, dia da semana, de onde veio, para onde foi, quantas vezes houve uma parada, quanto tempo durou a parada, qual foi a velocidade, houve um evento (do calendário de eventos). Dessa forma, poderíamos conectar todos os cruzamentos e acompanhar os veículos pelo corredor. E então poderíamos dizer coisas como, “esta é a quantidade que entrou em direção ao norte no lado sul do corredor, e então quantos saíram e assim por diante”.
Com o QORTEX da Quanergy, nós o calibramos e alcançamos 96% de precisão. Você não pode apenas contar IDs com o lidar; você tem que construir uma lógica para garantir que o mesmo ID esteja na saída e na entrada. Com essa lógica, podemos seguir os carros pelo cruzamento. Temos uma lógica que define o que é uma parada. Daí que 96% de acerto é onde acabamos, é muito preciso. Para os pedestres, com as zonas que definimos, você pode ver se a pessoa está dentro ou fora do meio-fio. Você pode ver se uma pessoa está dentro ou fora dos limites de uma faixa de pedestres. Você pode ver o quão perto um carro estava da pessoa. Com esse tipo de dados, podemos criar relatórios de quase acidentes. Definimos o que são quase-acidentes - os vetores, a velocidade e, em seguida, calculamos o tempo para eles colidirem, e se está em um determinado intervalo, então você chama de quase-acidente.
Isso só é possível porque os dados vindos do QORTEX são tão precisos, que podemos ver sem nunca ter que identificar ninguém. Não estamos armazenando nenhuma informação pessoal identificável. Uma pessoa é apenas um ponto. E um carro é só um quarteirão, você não sabe que tipo de carro é. Classificamos com base no tamanho.
O primeiro PoC era totalmente voltado para análise. No segundo, estamos ampliando o número de cruzamentos. Então agora temos cinco e vamos para 10. Ou seja, um corredor maior.
Em seguida, colocaremos em camadas todos os dados que estão atualmente bloqueados dentro dos gabinetes. Nos gabinetes, há um controlador de sinal e, no controlador, vários atuadores. Podem ser um loop detectando um veículo, um botão para pedestres ou sensores nos trilhos do metrô de superfície. Há priorização de sinais de trânsito. Tudo isso fica no controlador de sinal integrado.
Portanto, o que estamos fazendo agora é permitir a troca de informações nos dois sentidos com os controladores de sinal, pegando todos os dados das interseções, como os dados LIDAR e a classificação de objetos (novamente completamente anônimos), nas plataformas e nas paradas de ônibus. A classificação dos objetos desses sensores (que é toda processada nos sensores), nos dará o número de pessoas, bem como sua classificação - por exemplo, há alguém em uma cadeira de rodas, há pessoas empurrando um carrinho de bebê ou ter uma bicicleta. Muitos desses fatores determinarão o tempo de permanência do veículo de transporte. Queremos saber o tempo de permanência previsto com base em quantas pessoas estão lá.
Do sistema de back-end, vamos pegar o número de veículos. E então, com a análise, podemos determinar se precisamos, digamos, de 20 segundos de tempo de permanência ou 32 segundos de tempo de permanência. Podemos então extrapolar todas as 10 interseções,
Tratando todo o corredor de transporte como uma rede
Para otimizar todo o corredor, não podemos fazer isso sem saber exatamente onde as pessoas e os veículos estão e por quanto tempo. Isso significa que tratamos todo o corredor como uma rede, não como um nó individual. Isso significa que executamos os algoritmos com alta frequência e agora estamos debatendo se precisamos ir mais rápido do que 1 hertz, recalculamos tudo a cada segundo.
Então nós realmente dizemos ao controlador de sinal, você deve ir para o verde no sentido norte. Isso fecha o ciclo. Aprendendo com o trabalho da cadeia de suprimentos da Cisco, você sabe que essa é a única maneira de mover as coisas pela interseção. Toda a tecnologia está disponível, mas apenas otimiza todos os silos. Desse modo, estamos dando um grande salto com um novo paradigma, de gestão integrada de tráfego.
Já existem 7.000 câmeras em San Francisco. Mas as câmeras fornecem apenas uma imagem 2D. A precisão da localização é menos precisa do que você pode obter com lidar. Lidar sempre funciona, na chuva, à noite. E fica muito longe das questões de privacidade. No momento em que as pessoas sabem que estão sendo rastreadas, ou podem ser reconhecidas, surge a questão de as pessoas não confiarem no governo para protegê-las.
Os resultados deste projeto são permitir que os veículos de emergência tenham prioridade ao lidar com emergências, otimizando os tempos de trânsito e paradas, e até mesmo o pelotão de carros se não houver transporte público disponível, para movê-los de forma mais eficaz pelo corredor.
Obturador global de quarta geração explicado e porque os sensores de imagem incorporados precisam de melhores métricas de desempenho
O serviço de correção GNSS melhora a precisão da posição
Sensor
- Argumentando sobre chips neuromórficos para computação IA
- O caso C-suite para DDMRP
- Wi-Fi:A bala de prata para Smart Everything
- Aproveitando o poder das cidades inteligentes para um futuro mais brilhante
- O caso para trazer para casa a manufatura americana
- Empresas estabelecem prazos para sistemas inteligentes
- O caso da impressão 3D na manufatura
- Encontrando o retorno para a fabricação inteligente
- Material para a próxima geração de sensores inteligentes
- Software para a fábrica inteligente:As vantagens do software independente de hardware