


Proteção do Motor - Tipos de Falhas e Dispositivos de Proteção
Tipos de falhas do motor e dispositivos de proteção
Falhas e falhas comuns do motor
É importante conhecer e entender falhas e falhas do motor para definir os dispositivos de proteção mais adequados para cada caso . Você também deve conhecer termos importantes relacionados ao controle e proteção do motor.
Ser máquinas não estáticas motores estão sujeitos a estresse elétrico e mecânico .
Falhas do motor vêm em três tipos básicos :elétrica, mecânica e mecânica que progride em elétrica .
Tipos comuns de falhas e falhas do motor são:
- Falha no rolamento
- Quebra de isolamento
- Rotor bloqueado
- Superaquecimento
- Sobrecargas (elétricas e mecânicas)
- Desequilíbrio de fase e qualquer desequilíbrio de tensão levará a um desequilíbrio de corrente ainda maior.
- Correndo ao contrário
- Desalinhamento do eixo
- Vibração
Superaquecimento pode ocorrer devido ao subdimensionamento do motor , resfriamento insuficiente em baixa velocidade ao usar unidades de velocidade variável (VSD ), alterações no carregamento no motor como equipamento atolado e condições ambientais quentes .
Quebra de isolamento , levando a enrolamentos queimados , implica curto-circuito dentro do motor ou dentro do circuito de alimentação do motor , e pode ser causado por superaquecimento, sobrecargas e sobretensões .
Cerca de 80% de falhas de motores elétricos são resultado de danos no enrolamento do estator do motor e falhas no rolamento .
Falha no rolamento em motores pode ser uma indicação dos mancais incorretos para o aplicativo .
Um motor montado verticalmente precisa de rolamentos diferentes então um motor montado horizontalmente . Um motor acionando uma unidade grande ou multicorreia exigirá rolamentos que lidem com grandes cargas radiais . Um motor aparafusado para uma placa de base distorcida vai torcer .
Rolamentos geralmente são pequenos comparado com outros componentes principais do motor , tornando-os especialmente vulneráveis a danos e desgaste; alguns estudos culpam mais da metade de todas as falhas do motor no mau funcionamento do rolamento , a maioria dos quais resulta de pouca ou muita lubrificação . Outra causa significativa de falha de rolamento é desalinhamento .
Desalinhamento do eixo irá destruir rolamentos bem antes de sua vida profissional completa . O eixo do motor deve estar diretamente alinhado com o eixo que está conduzindo o que só pode ser alcançado usando técnicas de alinhamento de precisão como laser .
Outros problemas que podem ocorrer com motores são:
- Entrada de água e poeira nas bobinas do estator ou na carcaça do terminal, causando curtos-circuitos
- Pés do motor de pé manco aparafusados fora do nível
- Montagem do motor ou tipo de caixa incorreto
- Desequilíbrio elétrico ou mecânico
Ruído indica problemas motores mas normalmente não causa danos . Ruído , no entanto, é geralmente acompanhado por vibração .
Vibração pode causar danos de várias maneiras . Ele tende a soltar os enrolamentos e dano mecanicamente o isolamento por rachaduras, lascas ou abrasão do material . A fragilização dos fios condutores por movimento excessivo e faíscas das escovas nos comutadores ou anéis coletores de corrente também resultam da vibração.
Finalmente, vibração pode acelerar a falha do rolamento fazendo com que as esferas "brinnell" mancais de manga ser desformado ou as carcaças afrouxadas nas conchas .
Sempre que ruídos ou vibrações são encontrados em um motor em operação, a fonte deve ser rapidamente isolado e corrigido .
O que parece ser uma fonte óbvia de ruído ou vibração pode ser um sintoma de um problema oculto. Portanto, muitas vezes é necessária uma investigação completa.
Ruído e vibrações pode ser causado por um eixo do motor desalinhado ou pode ser transmitido para o motor da máquina acionada ou sistema de transmissão de energia . Eles também podem ser o resultado de desequilíbrio elétrico ou mecânico no motor .
Desequilíbrio elétrico ocorre quando a atração magnética entre o estator e o rotor é desigual em torno do periferia do motor . Isso faz com que o eixo se desvie à medida que gira criando um desequilíbrio mecânico . Desequilíbrio elétrico geralmente indica uma falha elétrica como um estator aberto ou enrolamento do rotor , uma barra aberta ou toque em motores de gaiola de esquilo ou bobinas de campo em curto em motores síncronos . Uma folga de ar desigual, geralmente de mancais de manga muito desgastados, também produz desequilíbrio elétrico .
As principais causas do desequilíbrio mecânico incluem uma montagem distorcida, eixo torto, rotor mal balanceado, peças soltas no rotor ou rolamentos ruins . Ruído também pode vir do ventilador batendo na moldura, na cobertura ou em objetos estranhos dentro da cobertura . Se os rolamentos estiverem ruins , conforme indicado pelo ruído excessivo do rolamento , é necessário determinar por que os rolamentos falharam .
Outro problema que os motores podem enfrentar é um tempo de partida longo . Se um motor for submetido a muitas partidas sucessivas , os enrolamentos do rotor ou barras do rotor pode ser aquecido até um ponto em que as conexões elétricas entre as barras do rotor e os anéis finais sejam danificadas .
Dispositivos de proteção do motor
Não importa qual tensão e tamanho nominais os motores têm protegidos contra sobrecorrentes (curto-circuito) e sobrecargas .
Motores LV de pequeno e médio porte geralmente são protegidos apenas contra sobrecargas e curtos-circuitos e grandes motores LV e motores MV têm também outras proteções .
Proteções contra sobrecarga e sobrecorrente deve ser projetado para ser insensível a correntes de pico na hora de partida , para evitar interrupção de energia prematura .
Para motores LV a proteção contra sobrecorrentes e curtos-circuitos pode ser executado por fusíveis , associado a chaves seccionadoras ou disjuntores de disparo instantâneo que respondam imediatamente (quase instantâneo ) valores de corrente de um curto-circuito, falha de aterramento ou corrente de rotor travada .
Disjuntores de tempo inverso têm recursos de viagem térmica e instantânea e são predefinidos para disparar em níveis padronizados .
Este é o tipo mais comum de disjuntor usado na construção civil, residencial, comercial e construção pesada.
A ação térmica deste disjuntor responde ao calor . Se as entradas e saídas de ventilação de um motor não forem adequadas para dissipar o calor dos enrolamentos do motor, o calor será detectado pela ação térmica do disjuntor .
Se curto-circuito deve ocorrer, a ação magnética do disjuntor detectará os valores instantâneos de corrente e desarmará o disjuntor .
Fusíveis geralmente não são adequados para proteção contra sobrecargas , porque se dimensionado para fornecer proteção contra sobrecarga , eles explodiriam quando o motor der partida devido à alta corrente de partida do motor , embora possam ser usados como uma proteção de backup de sobrecarga .
Proteção com fusíveis apresenta o risco de dano monofásico ao motor quando apenas um fusível queima a menos que seja fornecida proteção monofásica; este assunto será discutido mais adiante neste capítulo.
Motores LV e motores MV de grande porte estão protegidos contra curtos-circuitos (fase-fase e fase-terra ) por relés de sobrecorrente (50; 50N; 51; 51N ) conectado ao CT .
A proteção contra sobrecargas é normalmente assegurado pelo relé de sobrecarga térmica . Este relé pode ser dos seguintes tipos:
Tira bimetálica
Uma proteção contra sobrecarga térmica acomodará a breve alta corrente de partida de um motor enquanto protege com precisão de uma sobrecarga de corrente em execução . A bobina do aquecedor e a ação da tira bimetálica introduzir um atraso de tempo que oferece o tempo do motor para iniciar e estabilizar na corrente de funcionamento normal sem o disparo de sobrecarga térmica . Proteções contra sobrecargas térmicas pode ser redefinido manualmente ou automaticamente dependendo de sua aplicação e têm um ajustador que permite que eles sejam definidos com precisão para a corrente de funcionamento do motor .
Temperatura ambiente em que uma partida e um motor estão localizados deve ser considerado ao selecionar relés bimetálicos porque uma temperatura ambiente alta reduz o tempo de desarme por sobrecarga .
Tempo de disparo de sobrecarga reduzido pode levar a tropeções incômodas se um motor estiver localizado em uma temperatura ambiente mais fria que o motor de partida e leva ao desgaste do motor quando o motor está localizado em uma temperatura ambiente mais quente que o motor de partida .
A maioria dos dispositivos de sobrecarga térmica são classificados para uso em uma temperatura máxima de 40 ºC , e uma redução do relé pode ser necessária .
A maioria dos relés são ajustáveis em um intervalo de 85% para 115% de seu valor.
Alguns modelos estão disponíveis com compensação de ambiente . Um dispositivos com compensação de ambiente ponto de viagem não é afetado pela temperatura ambiente e funciona consistentemente no mesmo valor de corrente.
Esse tipo de relé é comumente usado em motores de baixa e média tensão .
Os padrões e os dados dos fabricantes geralmente mostram ponto de ajuste de regulamentação recomendado deste tipo de relés de acordo com a potência nominal do motor; mesmas tabelas também mostram correntes nominais recomendadas de fusíveis (tipo aM ou gG – consulte a Seção 2.4) e disjuntores instantâneos que são associados aos relés para proteção de sobrecorrente , conforme mostrado na Tabela 3.
Tabela 3 – Corrente nominal dos fusíveis para proteção do motor 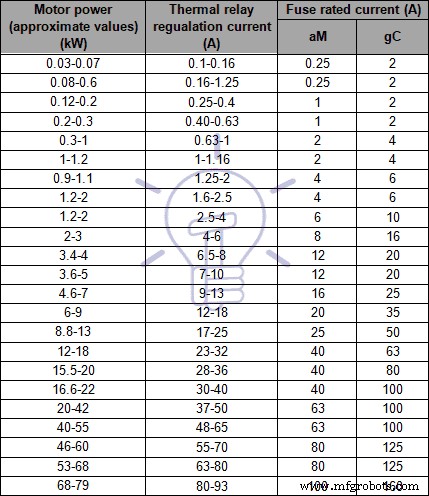
Relés de sobrecarga digital eletrônicos
Este tipo de proteção é usado para grandes motores de baixa tensão e motores de alta tensão , e contém um microprocessador . Esses dispositivos podem modelar o aquecimento dos enrolamentos do motor monitorando a corrente do motor e também podem incluir funções de medição e comunicação.
Proteção comum de grandes motores de baixa tensão e motores de média tensão geralmente é feito pelos seguintes dispositivos de proteção:
- Proteção contra sobrecarga:49
- Sobrecorrente de fase instantânea:50
- Sobrecorrente de terra instantânea:50N/50G
- Sobrecorrente de fase de atraso:51
- Sobrecorrente de terra com retardo de tempo:51N/51G
Em algumas situações não é recomendado proteger os motores contra sobrecargas; é o caso de bombas de água de combate a incêndio e exaustores de fumaça .
Motores muito grandes de BT e motores de MT são caros e geralmente é aconselhável fornecer esquemas de proteção mais abrangentes . Tais esquemas incluem:
- Monitores de temperatura e proteção de rolamentos (38 )
- Proteção diferencial (87M )
- Sequência de início incompleta/proteção de tempo de início longo (66 )
- Sequência de fase negativa (proteção de reversão de fase )
- Proteção contra superaquecimento
- Desequilíbrio de fase ou proteção contra falha de fase (47 )
- Proteção de rotor travado ou travado
- Proteção contra sub e sobretensão (27 e 59 , respectivamente)
- Monitores de vibração e proteção (39)
- Monitores de temperatura do enrolamento e dispositivos de proteção
Proteção diferencial para motores de baixa e alta tensão
Proteção diferencial é frequentemente fornecido para motores de tamanho médio e grande com tensões de alimentação superiores a cerca de 4 kV , e operado eletricamente (viagem de desvio ) disjuntores . A proteção diferencial fornece direção de alta velocidade e eliminação de falhas nos enrolamentos do estator do motor .
- Leia também:Como calcular o tamanho do cabo para motores LT e HT
Onde o sistema de alimentação está solidamente aterrado, a proteção diferencial detectará falhas fase-fase e fase-terra .
Com proteção diferencial a corrente em cada extremidade de cada enrolamento é comparada para determinar quando existe uma condição de falha .
Esta função requer dois conjuntos de CT , um no início do alimentador do motor e outro no ponto estrela .
A função de proteção diferencial só pode ser usado se ambos os lados de cada fase do estator forem retirados do motor para conexão externa tal que a corrente de fase entrando e saindo de cada fase pode ser medido . O elemento diferencial subtrai a corrente que sai de cada fase da corrente que entra em cada fase e compara o resultado ou diferença com o nível de captação diferencial.
Se essa diferença for igual ou maior que o nível de coleta, ocorrerá uma viagem .
A Figura 19 mostra um exemplo dessa proteção. 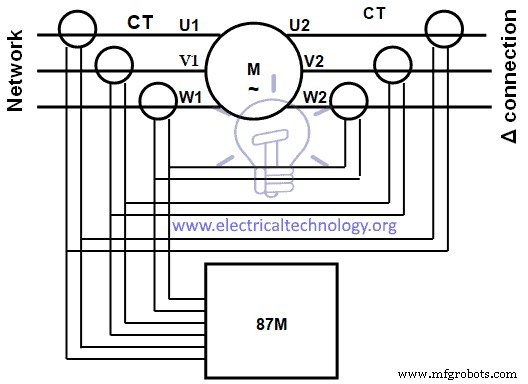
Figura 19 – Proteção diferencial do motor
Usando seis CT em uma configuração de soma , durante a partida do motor, os valores dos dois TCs em cada fase podem não ser iguais l como o CT não são perfeitamente idênticos e correntes assimétricas pode fazer com que o TC em cada fase tenha saídas diferentes .
Para evitar disparos incômodos nesta configuração, o nível diferencial pode ter que ser definido como menos sensível , ou o tempo diferencial pode ter que ser estendido para percorrer o período do problema durante a partida do motor .
O atraso diferencial de execução pode então ser ajustado a um aplicativo que responda muito rápido e é sensível a baixos níveis de corrente diferencial .
Superaquecimento dos enrolamentos a proteção geralmente é feita com Detetores de Temperatura de Resistência (RTD ) e termistor e dispositivos de desligamento automático pode ser instalado. Anexando um ventilador auxiliar separado para ajudar o ventilador do motor resolve o problema de superaquecimento quando um VSD é usado para controlar o motor sp eed.
Sequência de partida incompleta / tempo de partida longo causa superaquecimento do rotor .
Como não é possível medir fisicamente o calor do rotor em motores de gaiola é necessário determinar o calor medindo a corrente que o rotor está consumindo através do estator excitar o rotor. Uma réplica térmica do rotor é estabelecido usando um I
2
t curva .
A inibição de reinicialização irá bloquear o usuário de dar partida no motor se o relé determinar que o rotor atingiu uma temperatura que danificará o rotor deve ser tentada uma partida . Assim, o relé permitirá apenas uma reinicialização se o rotor tiver reserva térmica suficiente para dar partida .
Proteção de rolamento geralmente é realizado por RTD e thermistor para monitorar a temperatura .
Proteção contra vibração usa sensores/acelerômetros que são normalmente colocados em locais-chave no motor e rolamentos .
Desde que os rolamentos são a parte de transporte de carga do trem de acionamento mecânico, acelerômetros deve ser colocado na entrada e saída
A Figura 20 mostra um exemplo de sensores de vibração e locais recomendados. 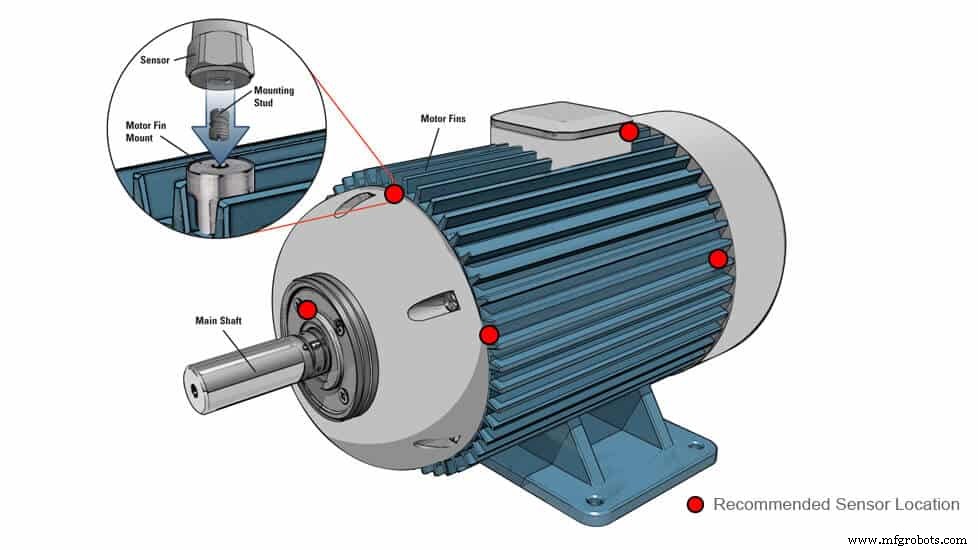
Figura 20 – Sensores de vibração do motor
Atualmente IED (consulte a Seção 2.1) que agrupam todas as funções de proteção necessárias são comumente usados para grandes motores LV e motores MV .

Sobre o Autor:Manuel Bolotinha
-Licenciatura em Engenharia Electrotécnica – Energia e Sistemas de Potência (1974 – Instituto Superior Técnico/Universidade de Lisboa)– Mestrado em Engenharia Electrotécnica e de Computadores (2017 – Faculdade de Ciências e Tecnologia/Nova Universidade de Lisboa)
– Consultor Sênior em Subestações e Sistemas de Potência; Instrutor Profissional
Tecnologia industrial
- O que é Prototipagem Rápida? - Tipos e Funcionamento
- O que é manufatura aditiva? - Tipos e funcionamento
- O que é solda? - Tipos e como soldar
- O que são laminadores e seus tipos?
- O que é soldagem por resistência? - Tipos e funcionamento
- O que é areia de moldagem? - Tipos e propriedades
- O que é Pulverização Térmica? - Tipos e Aplicação
- Tipos, vantagens e desvantagens da máquina de descarga elétrica (EDM)
- Tipos de operações de torno e ferramentas de corte
- Significado e Tipos do Processo de Fabricação