


Dispositivo de automação de tarefas de videogame
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
|
Sobre este projeto
Olá Mundo,
Se você é um jogador da velha escola, deve se lembrar do Nintendo NES R.O.B. por volta de 1985. Para a geração apenas em cena, era um robô que segurava o controlador NES, olhava a tela e jogava com ou contra você.
Sim, eu quis dizer 1985.
Sim, eu disse Nintendo Robot.
R.O.B sempre vem à mente quando sou forçado a tarefas repetitivas em videogames. Não seria ótimo entregar seu controlador ao seu companheiro robô e deixá-los lidar com as coisas ruins? Bem, em face da filetagem de centenas de peixes no Elder Scrolls Online, eu encontrei uma solução melhor. Infelizmente, não é R.O.B 2.0, não pesca para mim ... ainda. No entanto, é um dispositivo programado para pressionar um botão em um controlador de console a cada dois segundos ... olhe para a Skynet.
Construção do projeto
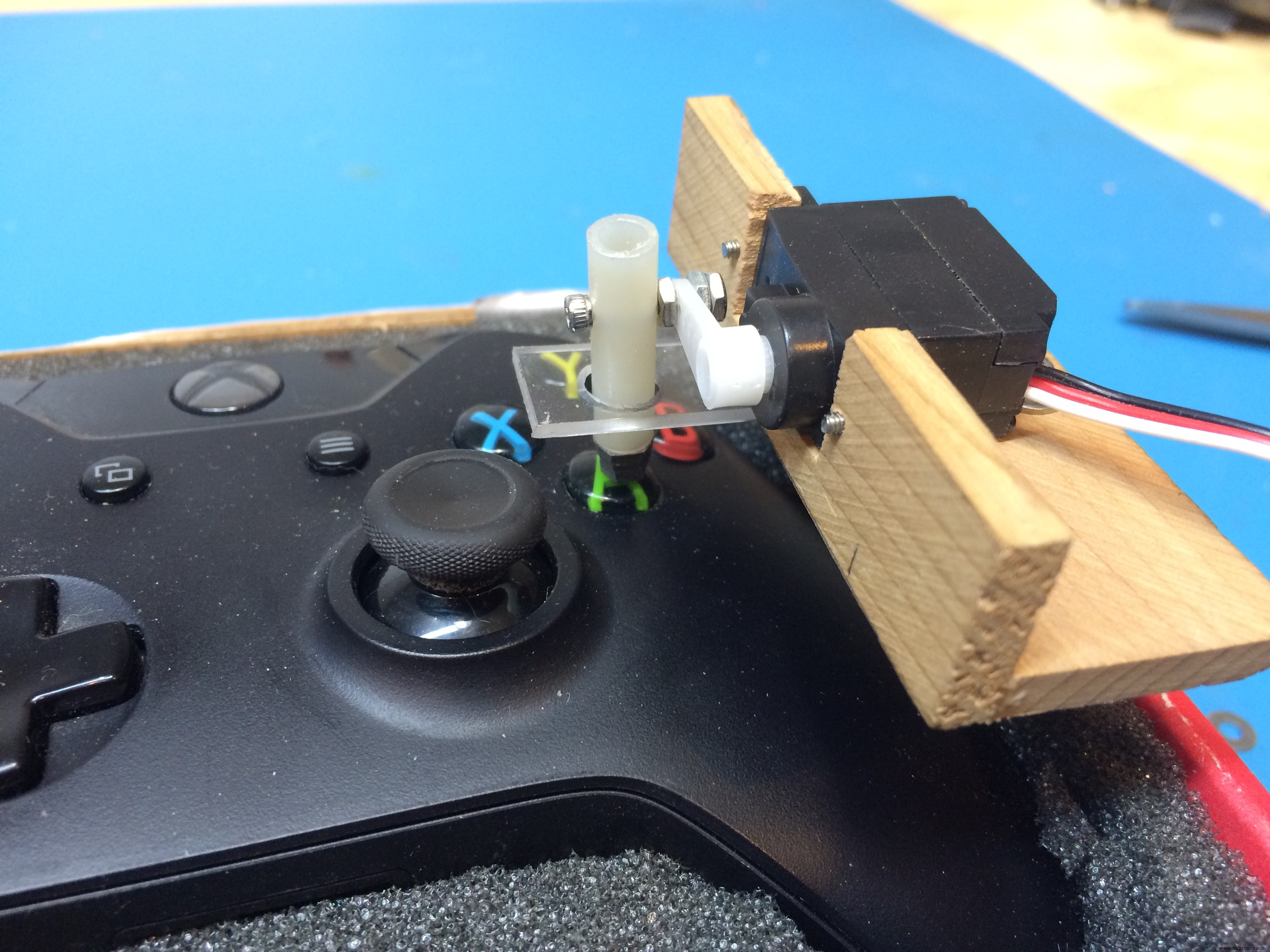
Reciclei uma caixa de transporte da SparkFun e algumas folhas de espuma para fazer um suporte confortável para o controle do Xbox.




Colei algumas folhas de baixo para fazer um suporte de servo. Um tubo de estireno com um amortecedor de borracha preso a uma extremidade para o polegar do automóvel e uma folha de arcrílico para segurar o "polegar" no lugar. (Enquanto escrevo isso mais de 3 anos depois, agora possuindo uma impressora 3D, esta é uma arte inaceitável do fabricante e será corrigida diretamente.:D)



O Código
É melhor o IBM Watson ficar atento. Este código pode conter a futura IA que aniquilará a espécie humana ... apenas dizendo que você foi avisado.
Sério, é um esboço muito simples.
#include // De LibraryServo servoMain; // Definir Servovoid setup () {servoMain.attach (9); // servo no pino digital 9} void loop () {servoMain.write (45); // Vire o Servo para a esquerda para 45 degreesdelay (1500); // Aguarde 1,5 segundoservoMain.write (0); // Gire o Servo para a esquerda para 0 degreesdelay (750); // Aguarde 0,75 segundo}
Concluindo
Este projeto começou um pouco como uma piada entre amigos e o vapor começou a existir. Os jogadores dão boas risadas com um pouco de criatividade. Há muitas coisas para melhorar no design, mas às vezes é melhor mantê-lo simples.
Versões futuras
Em algum momento, pretendo revisitar o controlador automático. Imprimir 3D um anexo de gaiola, adicionar todas as funções com algum feedback sensorial da tela (foto) e controlador (vibração). Um autopista seria um desafio interessante. Na estrada, pude vê-lo competindo contra os melhores humanos, como os computadores Chess faziam nos anos 80. Se você tiver alguma sugestão ou feedback, adoraria ouvi-lo. Sabe de algum jogo com tarefas irritantes para resolver? Por favor, poste abaixo.
Saída
y (o.o) y
Código
- Pressione o botão O
Pressione o botão O Arduino
Operar um servo a cada x segundos para pressionar um botão em um controle remoto.#include// From LibraryServo servoMain; // Definir Servovoid setup () {servoMain.attach (9); // servo no pino digital 9} void loop () {servoMain.write (45); // Gire o Servo para a esquerda para 45 graus delay (1500); // Aguarde 1,5 segundo servoMain.write (0); // Gire o Servo para a esquerda para 0 graus delay (750); // Aguarde 0,75 segundo}
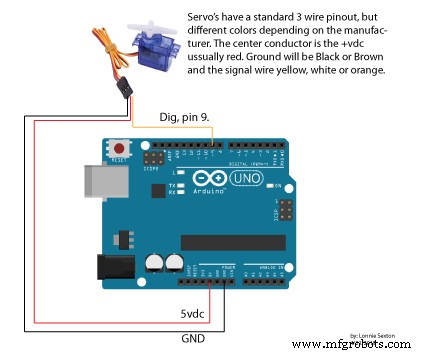
Esquemas
Processo de manufatura
- Dispositivo de depilação
- Xadrez
- Pinball
- Renesas:controlador de vídeo full HD LCD com entrada MIPI-CSI2
- Estação meteorológica Raspberry Pi 2
- RASPBERRY PI HOME AUTOMATION
- Como escolher um controlador de automação industrial
- Vídeo:alta taxa de produção em VMCs usando automação robótica
- Entendendo a Automação de Imprensa
- Gerenciando um dispositivo PLCnext Control via SNMP