


Controlar Arduino Robot Arm com aplicativo Android
Componentes e suprimentos
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Aplicativos e serviços online
| ||||
 |
|
Sobre este projeto
Este tutorial é baseado em recursos desta página.
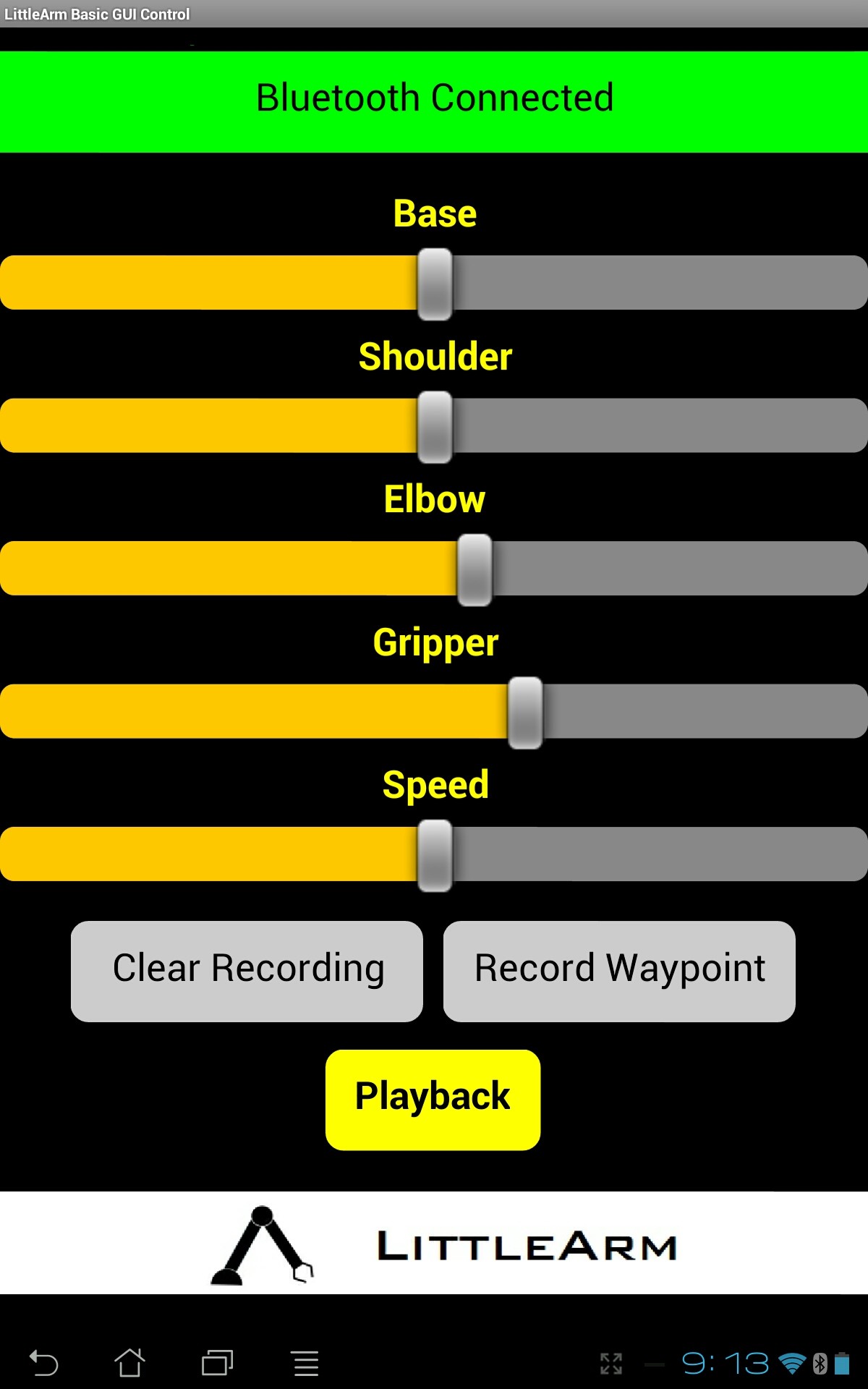
O LittleArm é tradicionalmente controlado por meio de um aplicativo gratuito para computador desktop que roda em Windows e Linux. Mas isso requer que o LittleArm esteja conectado a um computador para ser controlado. Finalmente concluímos o aplicativo do LittleArm para que você possa controlar o Arduino sem fio com Bluetooth.
O aplicativo permite que você controle todos os DOF's do LittleArm, mas também grave conjuntos de comandos e os reproduza. O código para o Arduino não muda do nosso código tradicional nos pacotes de software a partir daqui.
O aplicativo LittleArm para este projeto pode ser baixado aqui.
Código
- código Arduino
Código do Arduino Arduino
Este código pode ser usado com o aplicativo desktop ou Android via bluetooth ou usb#include// biblioteca arduino # include // biblioteca c padrão # define PI 3.141Servo baseServo; Servo ombroServo; Servo cotoveloServo; Servo gripperServo; comando int; struct jointAngle {int base; ombro interno; int cotovelo;}; int desejadoGrip; int gripperPos; int desejadoDelay; int servoSpeed =15; int pronto =0; struct jointAngle desejadoAngle; // ângulos desejados dos servos // +++++++++++++++ DECLARAÇÕES DE FUNÇÃO +++++++++++++++++++++++ +++ int servoParallelControl (int thePos, Servo theServo); // +++++++++++++++++++++++++++++++++++ ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++; baseServo.attach (9); // conecta o servo no pino 9 ao objeto servo ombroServo.attach (10); elbowServo.attach (11); gripperServo.attach (6); Serial.setTimeout (50); // garante que o arduino não leia serial por muito tempo Serial.println ("started"); baseServo.write (90); // posições iniciais dos servos ShoulderServo.write (150); elbowServo.write (110); pronto =0;} // loopvoid de arduino primário () {if (Serial.available ()) {pronto =1; desejadoAngle.base =Serial.parseInt (); desejadoAngle.shoulder =Serial.parseInt (); desejadoAngle.elbow =Serial.parseInt (); desejadoGrip =Serial.parseInt (); desejadoDelay =Serial.parseInt (); if (Serial.read () =='\ n') {// se o último byte for 'd' então pare de ler e execute o comando 'd' significa 'feito' Serial.flush (); // limpa todos os outros comandos empilhados no buffer // envia a conclusão do comando Serial.print ('d'); }} int status1 =0; int status2 =0; int status3 =0; int status4 =0; int feito =0; while (done ==0 &&ready ==1) {// move o servo para a posição desejada status1 =servoParallelControl (desejadoAngle.base, baseServo, desejadoDelay); status2 =servoParallelControl (desejadoAngle.shoulder, ombroServo, desejadoDelay); status3 =servoParallelControl (desejadoAngle.elbow, cotoveloServo, desejadoDelay); status4 =servoParallelControl (desejadoGrip, gripperServo, desejadoDelay); if (status1 ==1 &status2 ==1 &status3 ==1 &status4 ==1) {done =1; }} // fim do tempo} // ++++++++++++++++++++++++++++++ DEFITNIÇÕES DE FUNÇÃO +++++++++ +++++++++++++++++++++++++++++++++++++ int servoParallelControl (int thePos, Servo theServo, int theSpeed) {int startPos =theServo.read (); // lê a posição atual int newPos =startPos; // int theSpeed =speed; // define onde está a posição em relação ao comando // se a posição atual é menor que o movimento real para cima if (startPos <(thePos-5)) {newPos =newPos + 1; theServo.write (newPos); atraso (theSpeed); return 0; } else if (newPos> (thePos + 5)) {newPos =newPos - 1; theServo.write (newPos); atraso (theSpeed); return 0; } else {return 1; }}
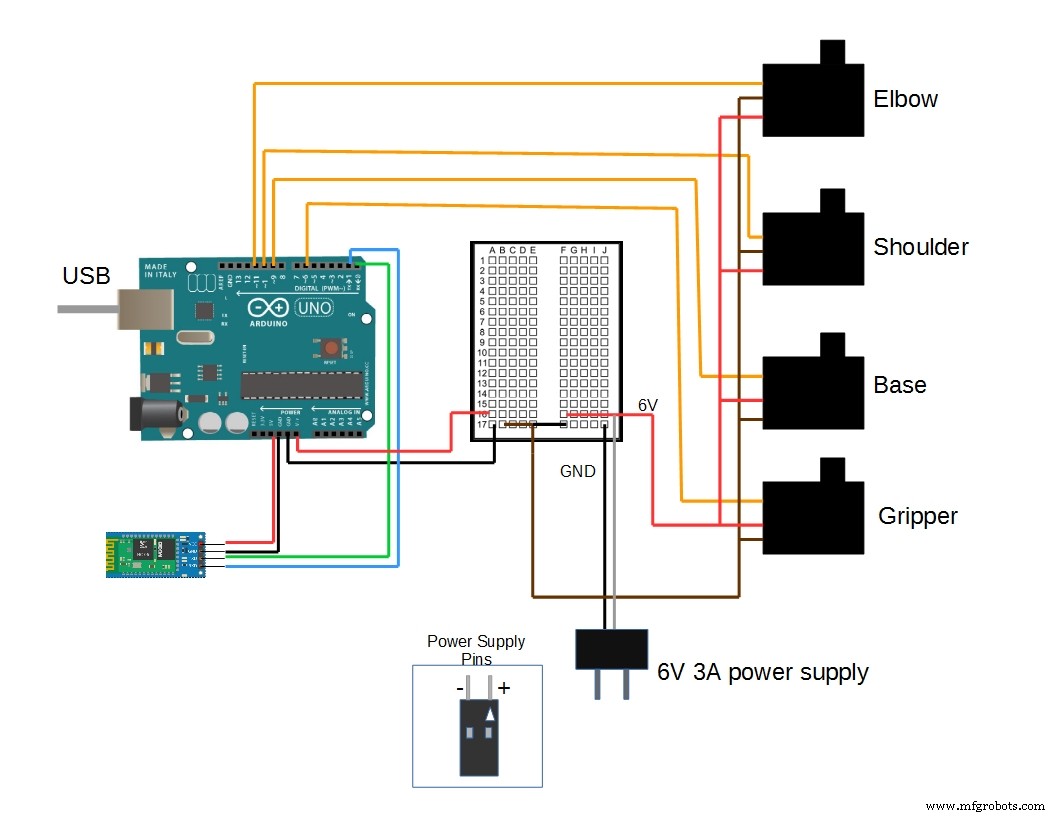
Esquemas
Processo de manufatura
- Controle remoto universal usando Arduino, 1Sheeld e Android
- Aceitar moeda de controle com Arduino
- Usando IoT para controlar remotamente um braço robótico
- Obstáculos para evitar o robô com servo motor
- Arduino com Bluetooth para controlar um LED!
- Controle de um robô Roomba com Arduino e dispositivo Android
- Braço robótico controlado por Nunchuk (com Arduino)
- Arduino Nano:Controle 2 motores de passo com joystick
- Littlearm 2C:Construir um braço de robô Arduino impresso em 3D
- ThimbleKrox - Controle do mouse com os dedos