


Arduino Nano:Controle 2 motores de passo com joystick
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 |
Aplicativos e serviços online
 |
| |||
 |
|
Sobre este projeto
Ao construir o Arduino projetos com motores de passo , como CNC máquina, plotter , ou Arte Animada , chega um momento em que os steppers precisam ser controlados manualmente. Joysticks analógicos são módulos baratos e fáceis para controle manual, com velocidade variável. Eles parecem ser uma boa escolha para controlar os steppers . Resolvendo o problema com o Arduino tradicional código, entretanto, não é trivial.
Neste tutorial, vou mostrar como é fácil programar Arduino Nano com Visuino para controlar 2 motores de passo com Joystick .
Etapa 1:componentes
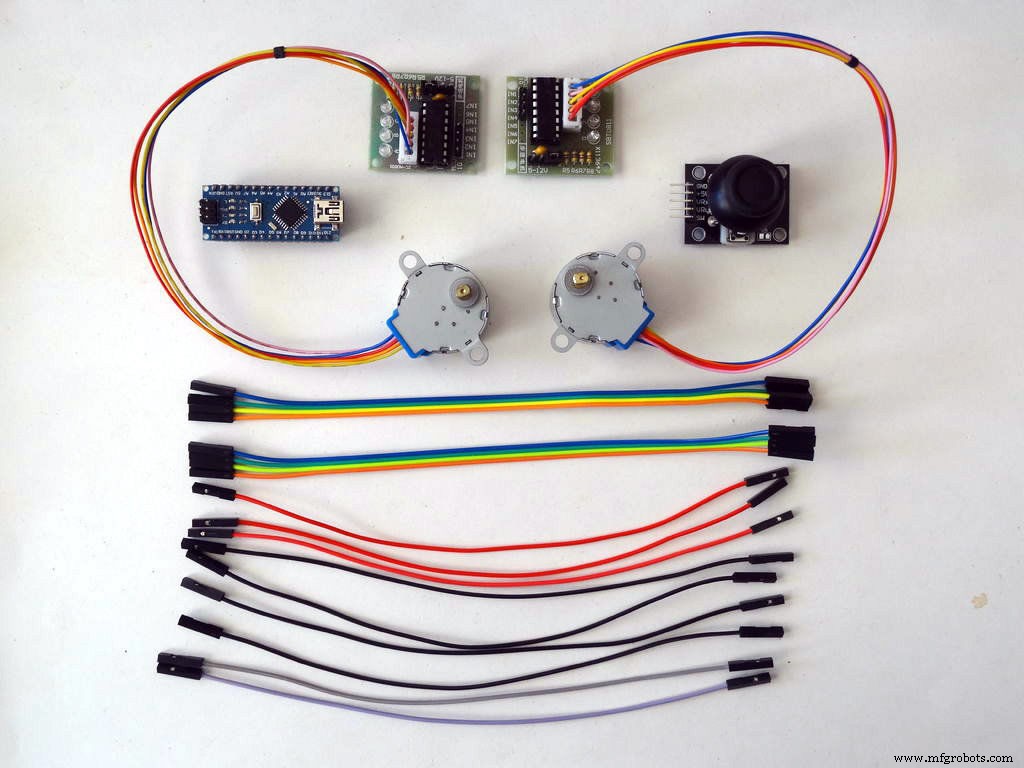
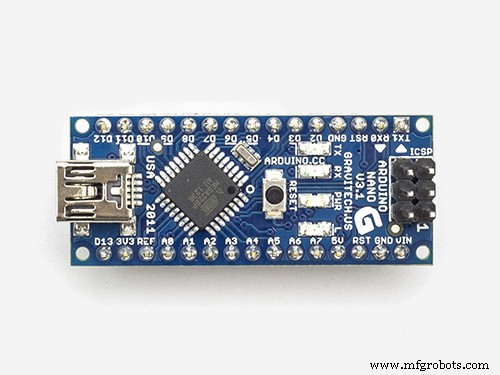
- Um Arduino placa compatível (eu uso Arduino Nano, porque tenho uma, mas qualquer outra vai servir)
- Um joystick que obtive deste conjunto barato de 37 sensores
- Dois motores de passo 5V com placas do condutor (Usei 28BYJ-48 stepper com placa de driver ULN2003)
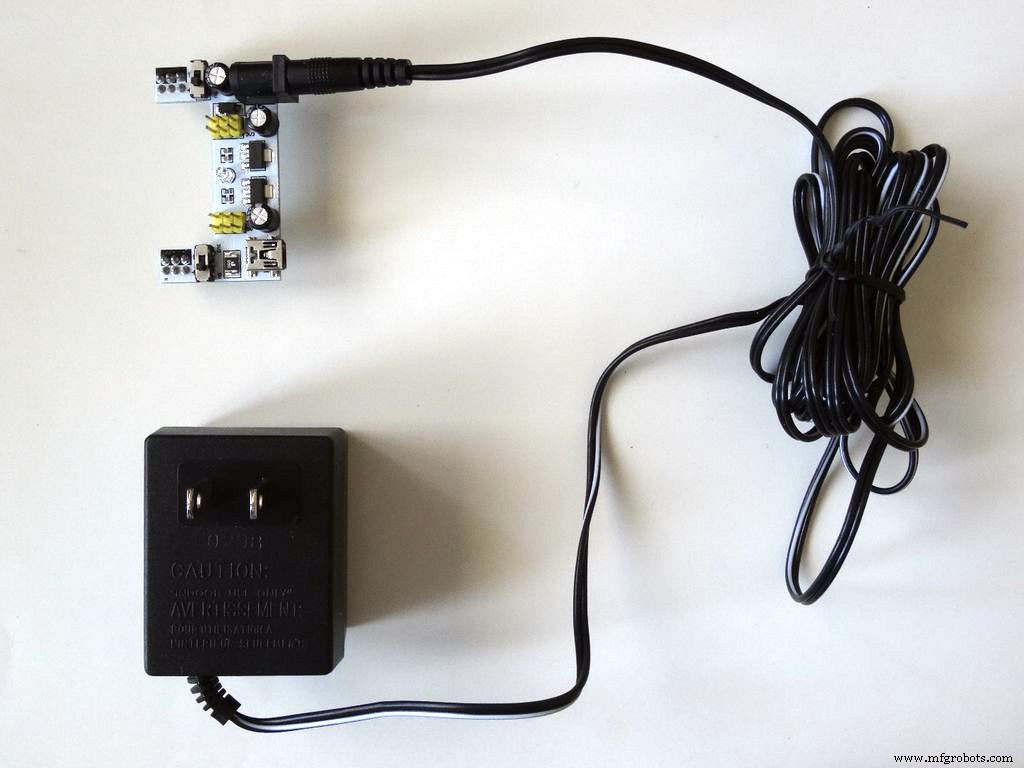
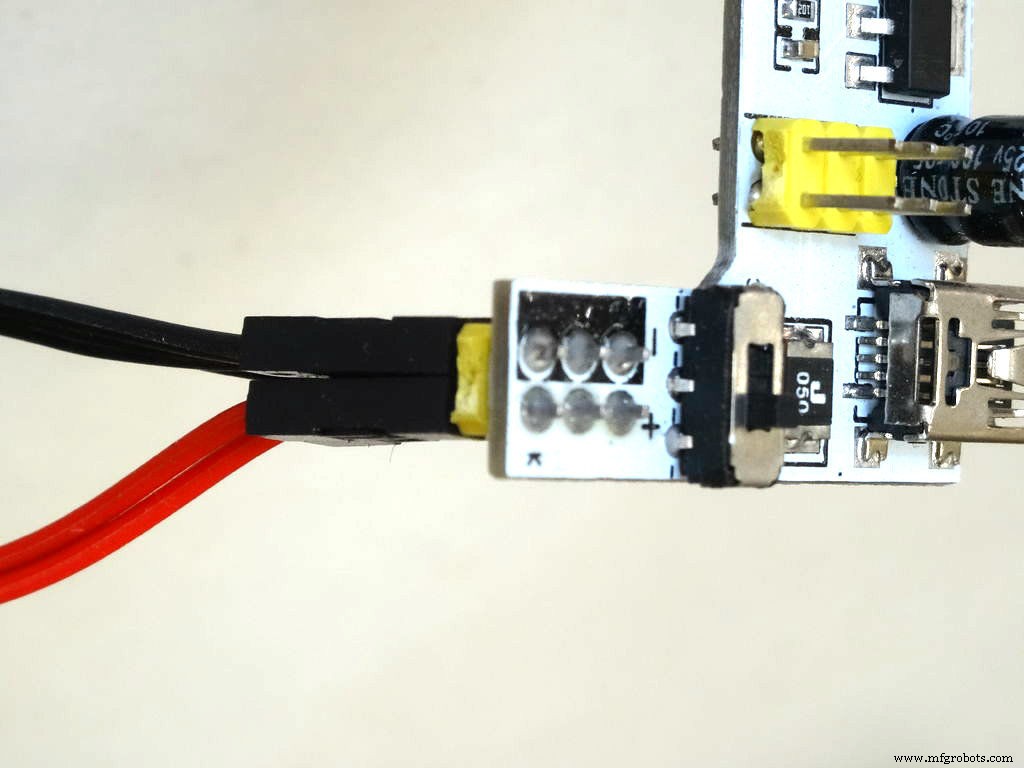
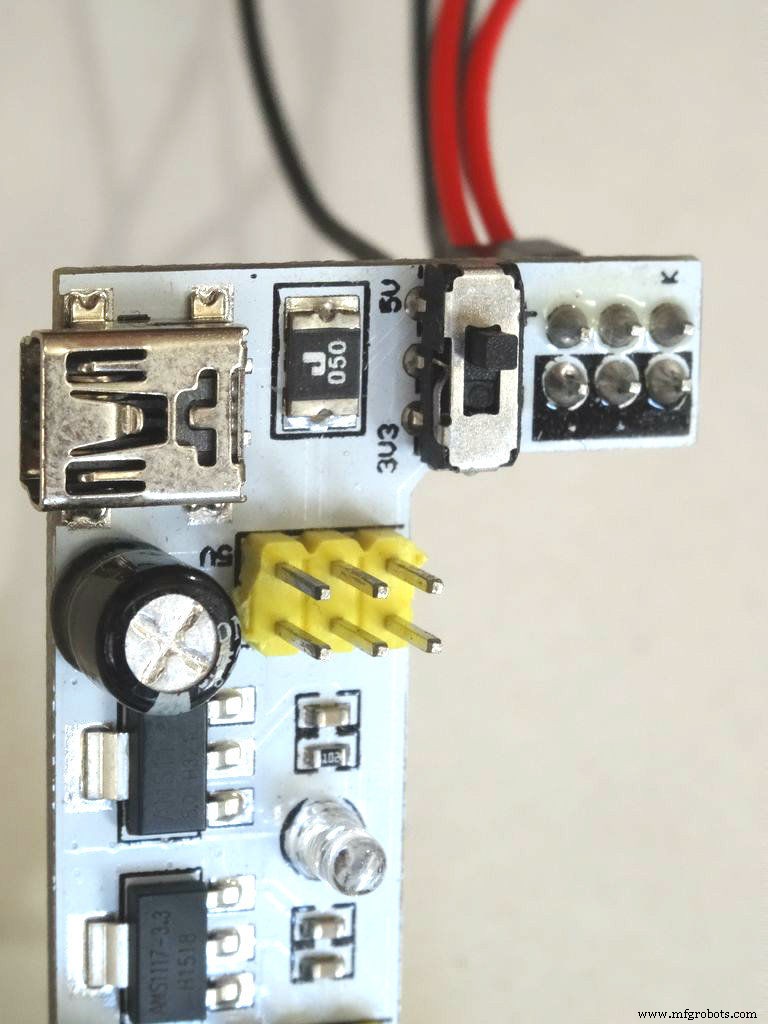
- Uma fonte de alimentação da placa de ensaio K2 com adaptador ( Imagem 2 ), ou outra fonte de energia 5V para os Steppers
- 17 Feminino-Feminino fios de ligação
Etapa 2:conectar a alimentação e aterrar os motores de passo
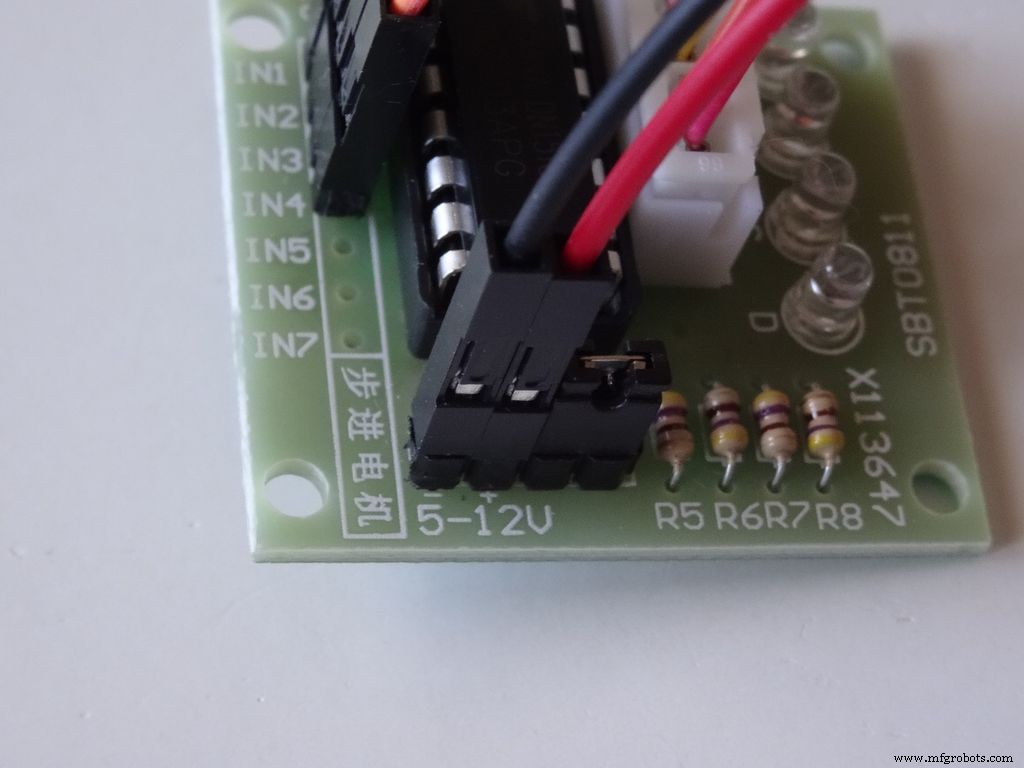

- Conecte o aterramento ( Fio preto ) e Poder ( fio vermelho ), para cada um dos módulos de driver de passo ( Imagem 1 )
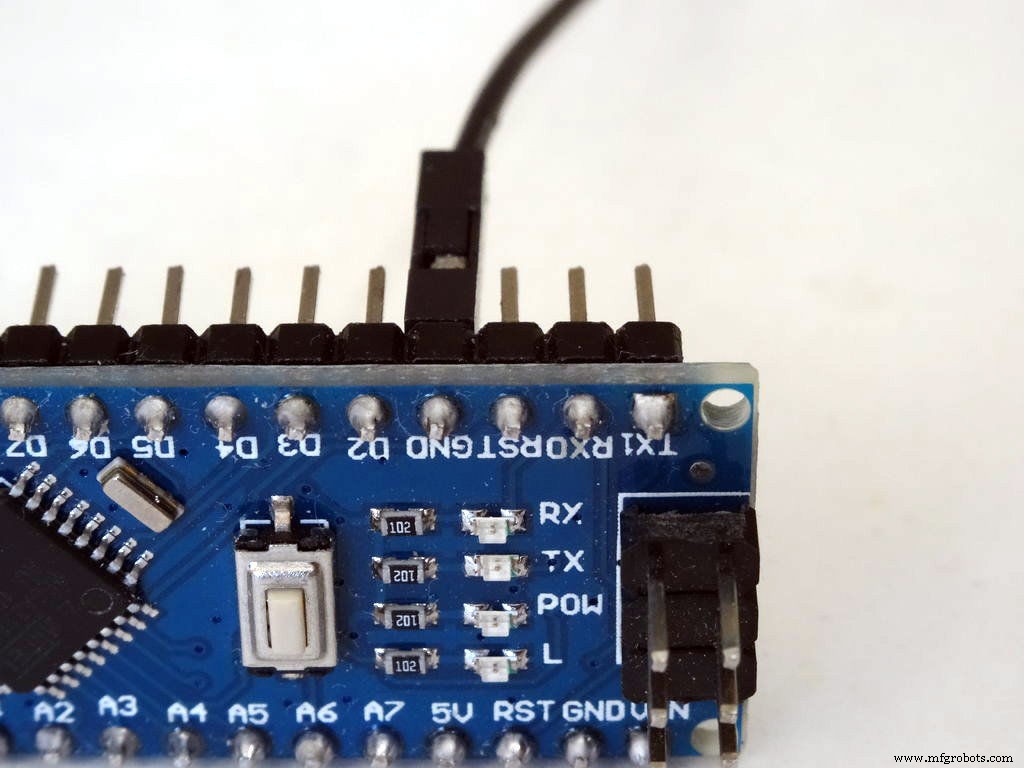
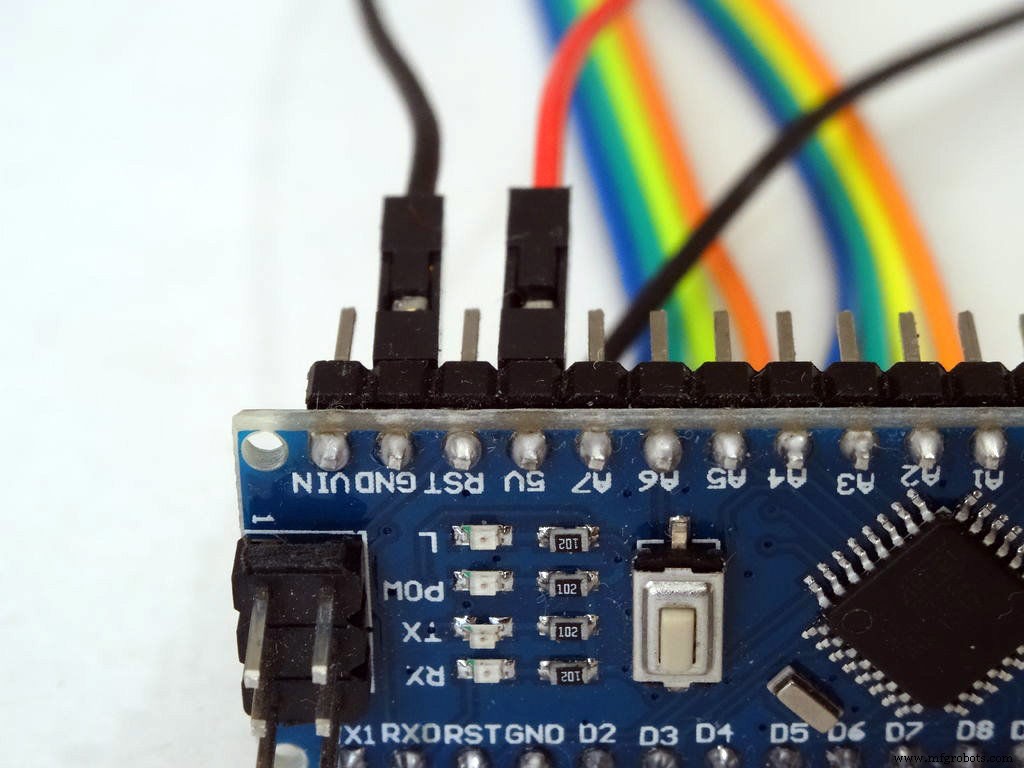
- Conecte outro aterramento ( Fio preto ) para Solo pino do Arduino tabuleiro ( Figura 2 )
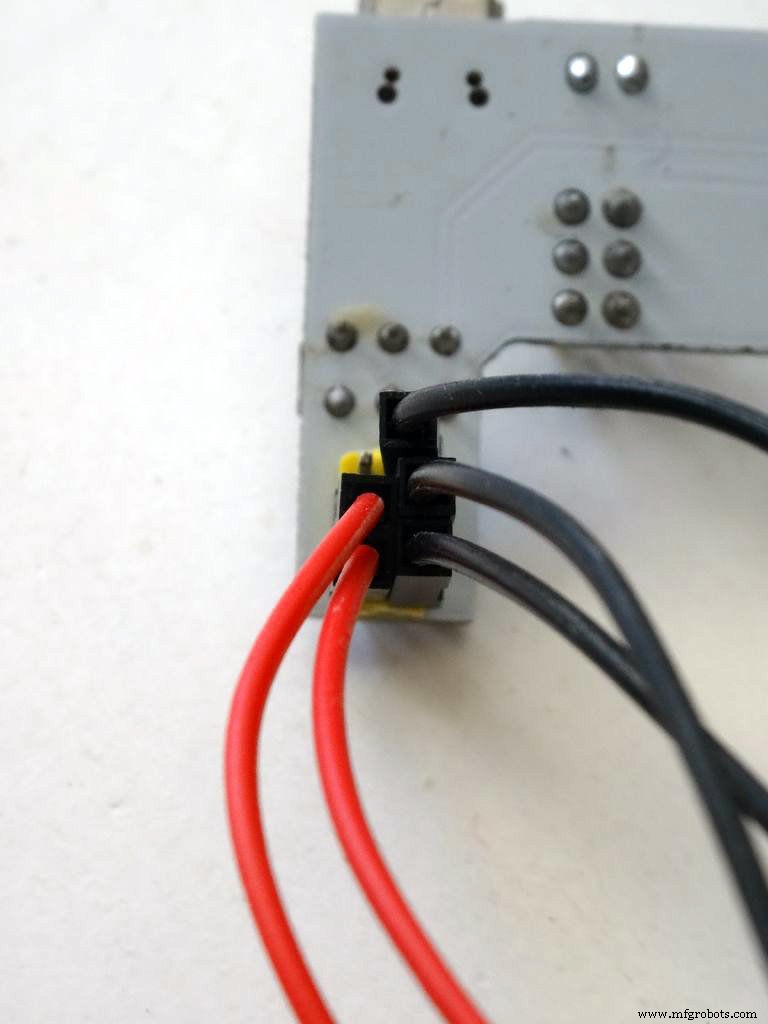
- Conecte a outra extremidade do Alimentação ( fios vermelhos ) a partir dos módulos do driver do motor para o "" Poder pinos da fonte de alimentação K2 ( Imagens 3 e 4 )
- Conecte a outra extremidade do Terra ( fios pretos ) a partir dos módulos Motor Driver e o Arduino para o " - " Terrestre pinos da fonte de alimentação K2 ( Imagens 3 e 4 )
- Certifique-se de que o botão de seleção de energia da fonte de alimentação K2 está definido para 5V ( Figura 5 )
- Figura 6 mostra onde fica o Ground pino do Arduino Nano
Etapa 3:conectar os motores de passo ao Arduino

- Se ainda não estiver conectado, ligue os conectores do motor de passo nas placas do driver
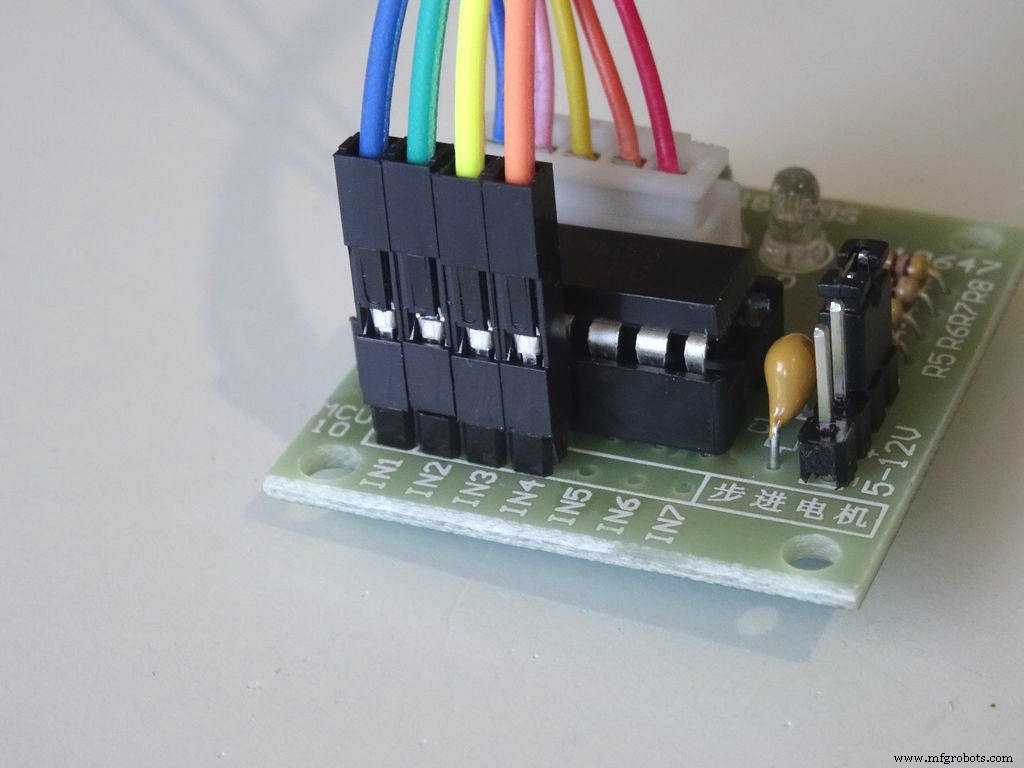
- Conecte uma extremidade dos fios de ligação fêmea-fêmea ( fios azul, verde, amarelo e laranja ) para os pinos IN1 a IN4 do driver de passo para o Primeiro Motor ( Imagem 1 )
- Conecte uma extremidade dos fios de ligação fêmea-fêmea ( fios azul, verde, amarelo e laranja ) para os pinos IN1 a IN4 do driver de passo para o segundo motor ( Imagem 1 )
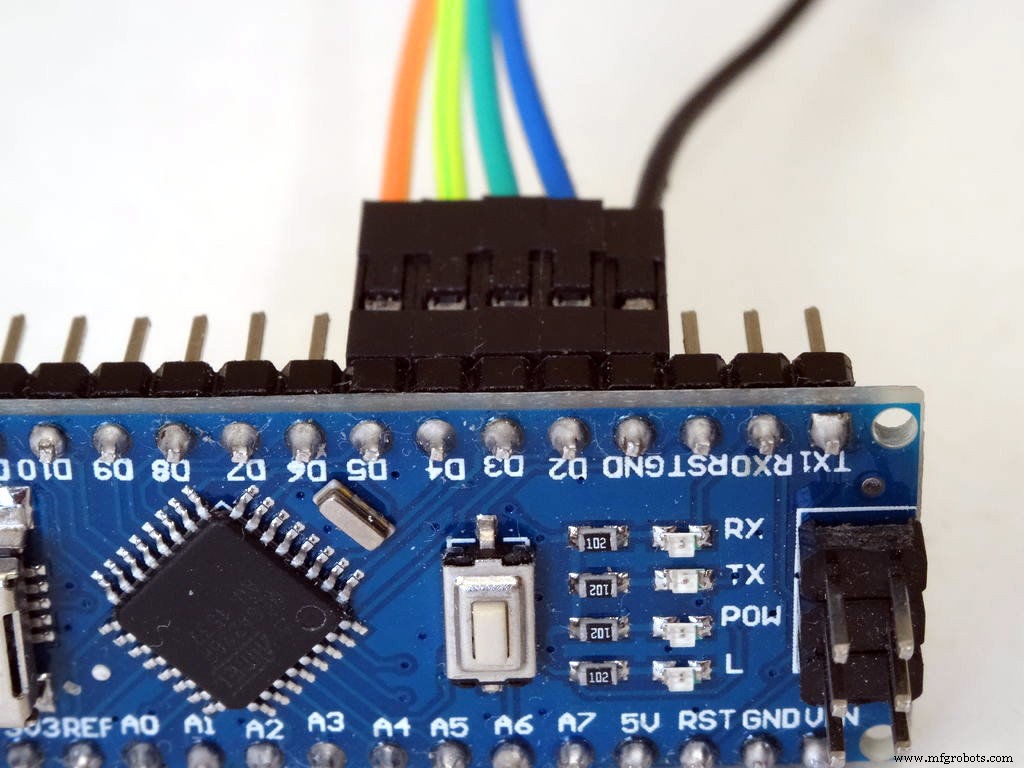
- Conecte o fio IN1 do Primeiro Motor ( fio azul ) para o pino digital 2 do Arduino tabuleiro ( Figura 2 )
- Conecte o fio IN2 do Primeiro Motor ( fio verde ) para o pino digital 3 do Arduino tabuleiro ( Figura 2 )
- Conecte o fio IN3 do Primeiro Motor ( fio amarelo ) para o pino digital 4 do Arduino tabuleiro ( Figura 2 )
- Conecte o fio IN4 do Primeiro Motor ( fio laranja ) para o pino digital 5 do Arduino tabuleiro ( Figura 2 )
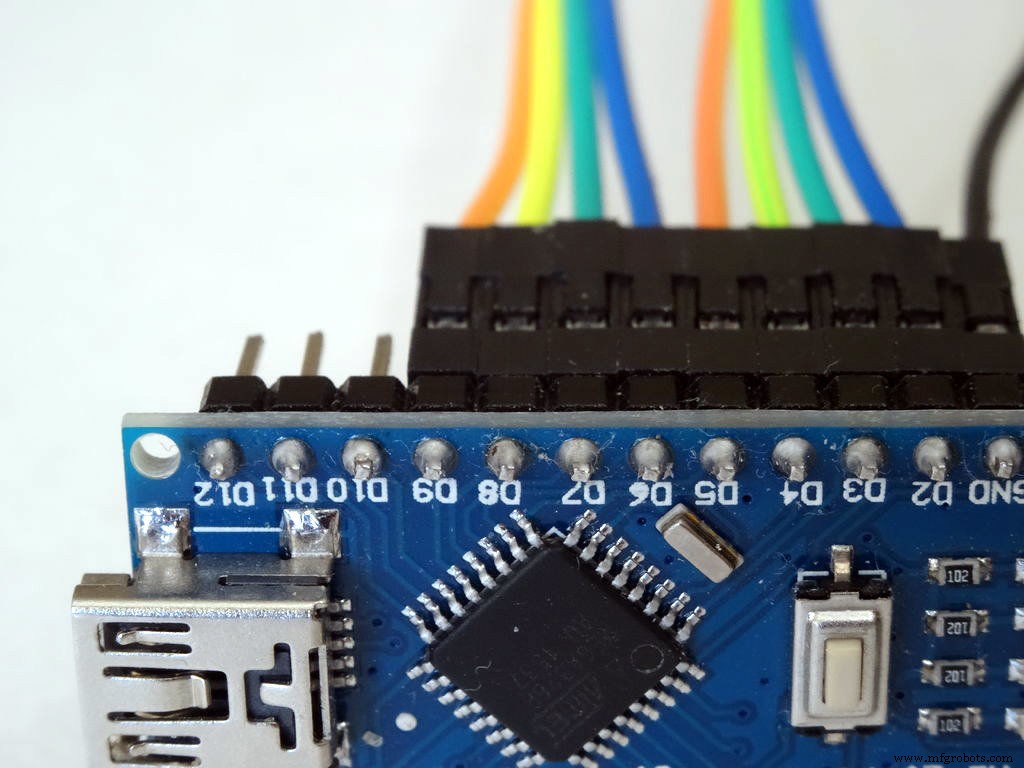
- Conecte o fio IN1 do segundo motor ( fio azul ) para o pino digital 6 do Arduino tabuleiro ( Figura 3 )
- Conecte o fio IN2 do segundo motor ( fio verde ) para o pino digital 7 do Arduino tabuleiro ( Figura 3 )
- Conecte o fio IN3 do segundo motor ( fio amarelo ) para o pino digital 8 do Arduino tabuleiro ( Figura 3 )
- Conecte o fio IN4 do segundo motor ( fio laranja ) para o pino digital 9 do Arduino tabuleiro ( Figura 3 )
- Figura 4 mostra em vermelho onde estão o Digital 2 para Digital 9 pinos do Arduino Nano. Em azul é mostrada a conexão feita na etapa anterior.
Etapa 4:conecte o joystick ao Arduino
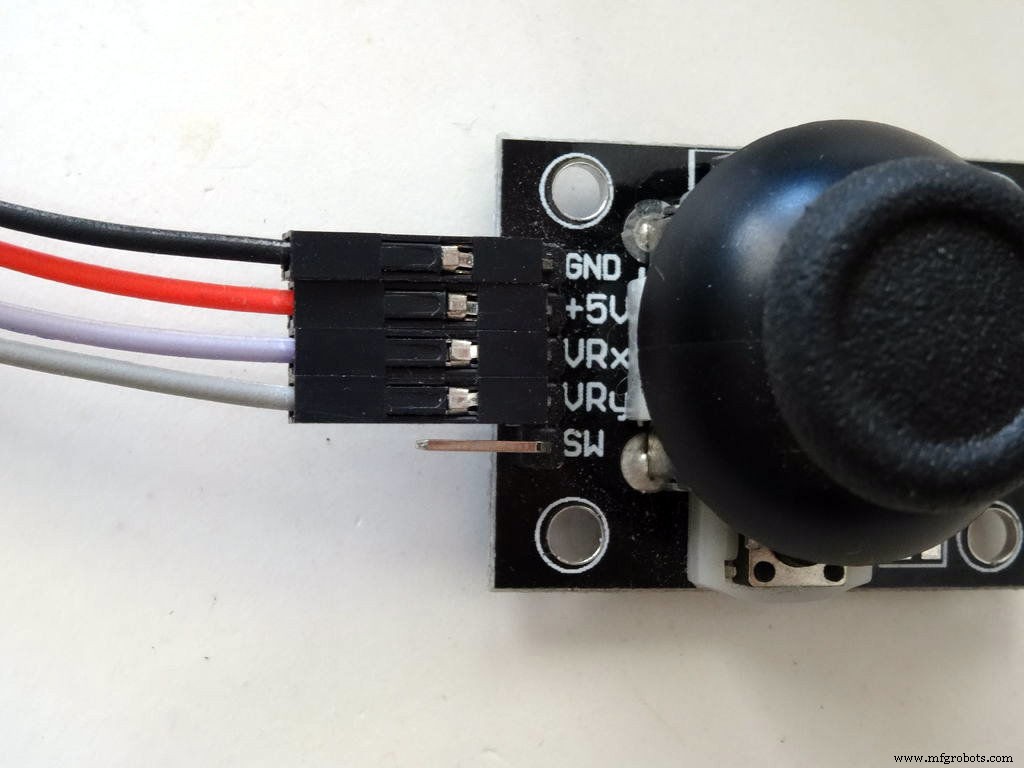
- Conecte Mulher-Mulher fios para o aterramento ( Fio preto ), Potência ( fio vermelho ), VRx ( fio roxo ) e VRy ( fio cinza ) do Joystick como mostrado na Figura 1
- Conecte o fio terra ( Fio preto ) para o Solo pino do Arduino tabuleiro ( Figura 2 )
- Conecte o fio de alimentação ( fio vermelho ) para o 5V Pino de alimentação do Arduino ( Figura 2 )
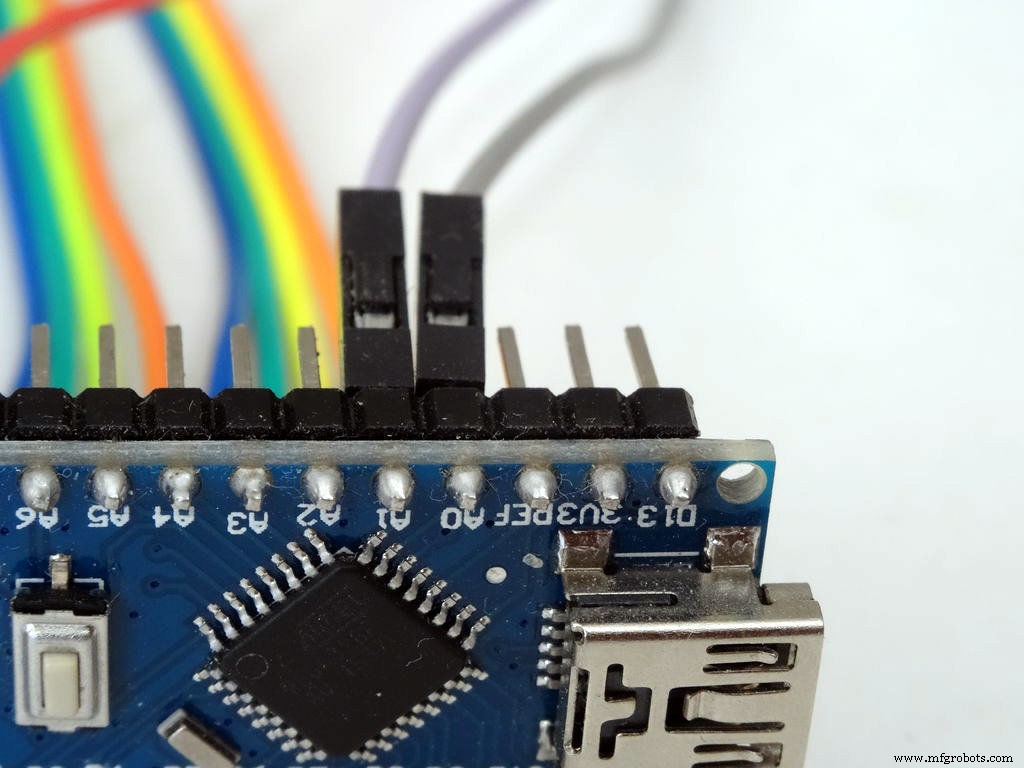
- Conecte o fio VRx ( fio marrom ) o Analógico 1 pino do Arduino tabuleiro ( Figura 3 )
- Conecte o fio VRy ( fio cinza ) o Analógico 0 pino do Arduino tabuleiro ( Figura 3 )
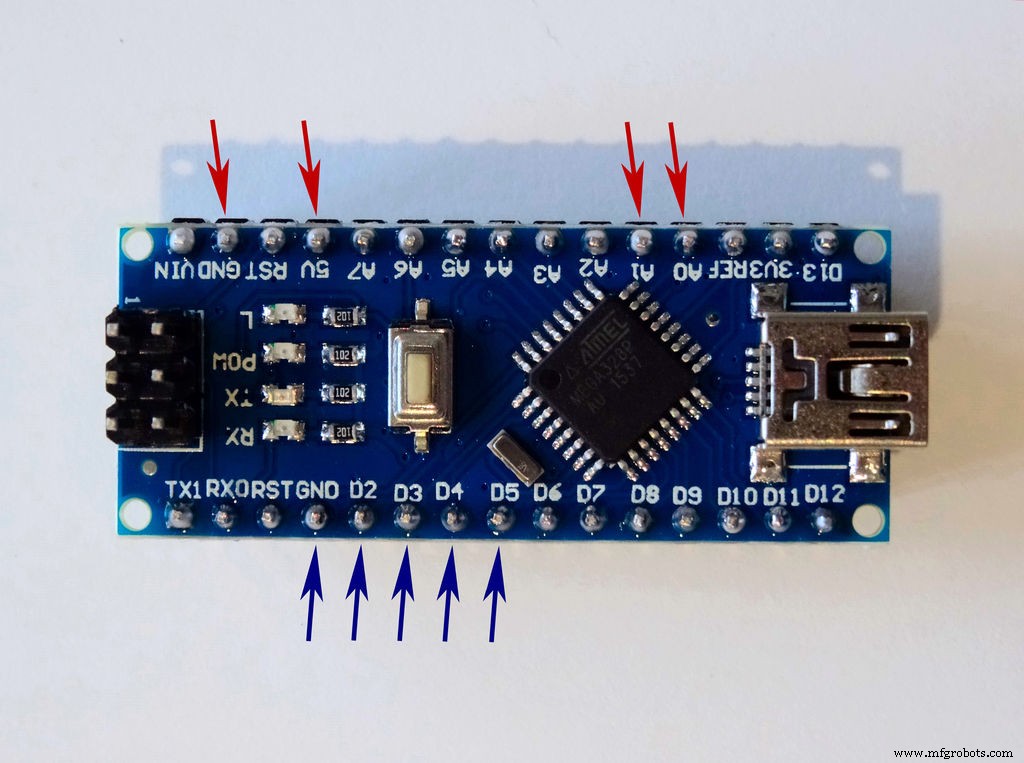
- Figura 4 mostra em vermelho onde estão os Terrenos , 5V Potência, Analógico 0 e Analógico 1 pinos do Arduino Nano. Em azul é mostrada a conexão feita nas etapas anteriores.
Etapa 5:inicie o Visuino e selecione o tipo de placa Arduino
Para iniciar a programação do Arduino, você precisará ter o Arduino IDE instalado a partir daqui:http://www.arduino.cc/.
Certifique-se de instalar 1.6.7 superior, caso contrário, este tutorial não funcionará!
O Visuino :https://www.visuino.com também precisa ser instalado.
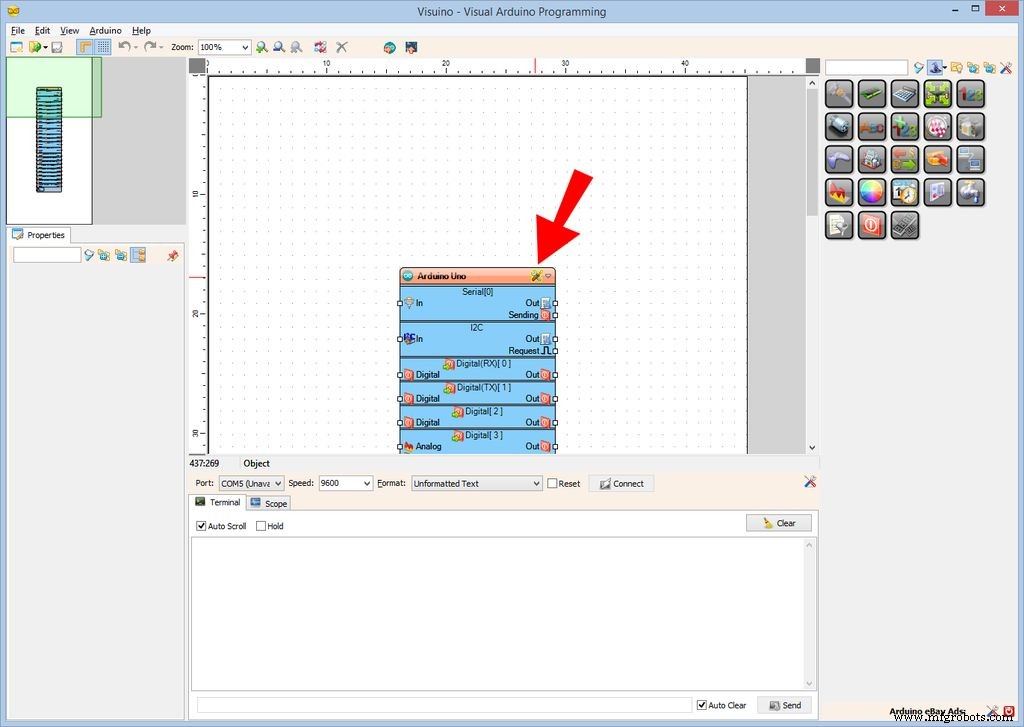
- Inicie o Visuino como mostrado na primeira imagem
- Clique em " Ferramentas "no componente Arduino ( Figura 1 ) em Visuino
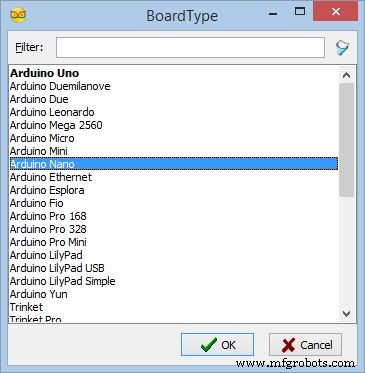
- Quando a caixa de diálogo aparecer, selecione Arduino Nano como mostrado na Figura 2
Etapa 6:No Visuino:adicione e conecte os componentes do motor de passo

Primeiro, precisamos adicionar componentes para controlar os motores de passo:
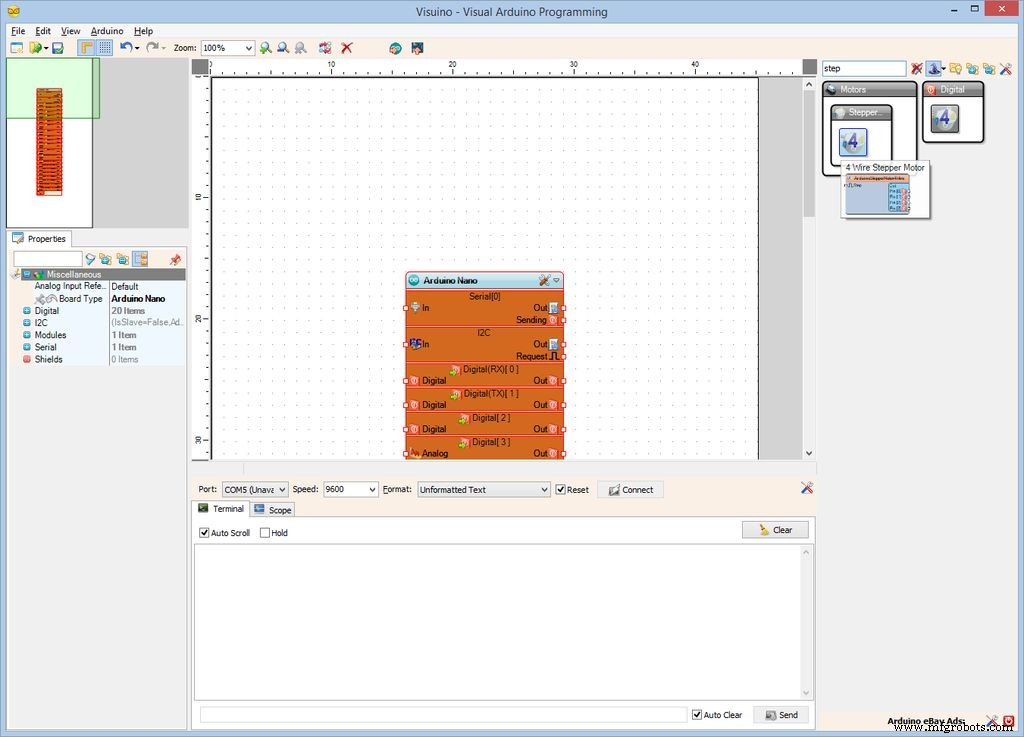
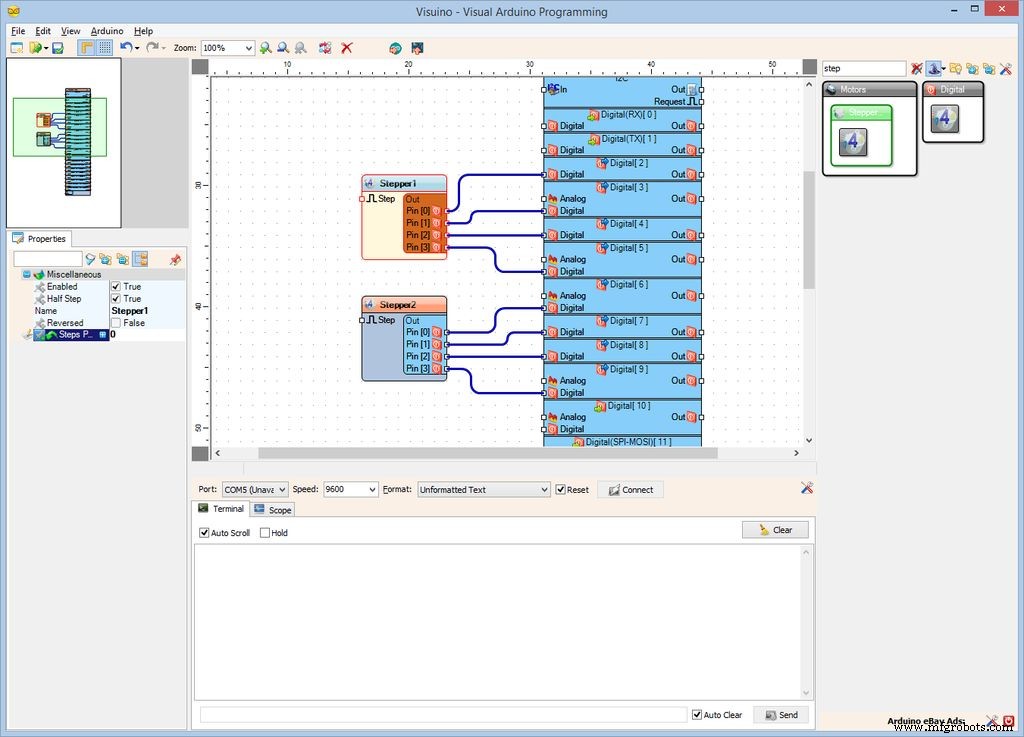
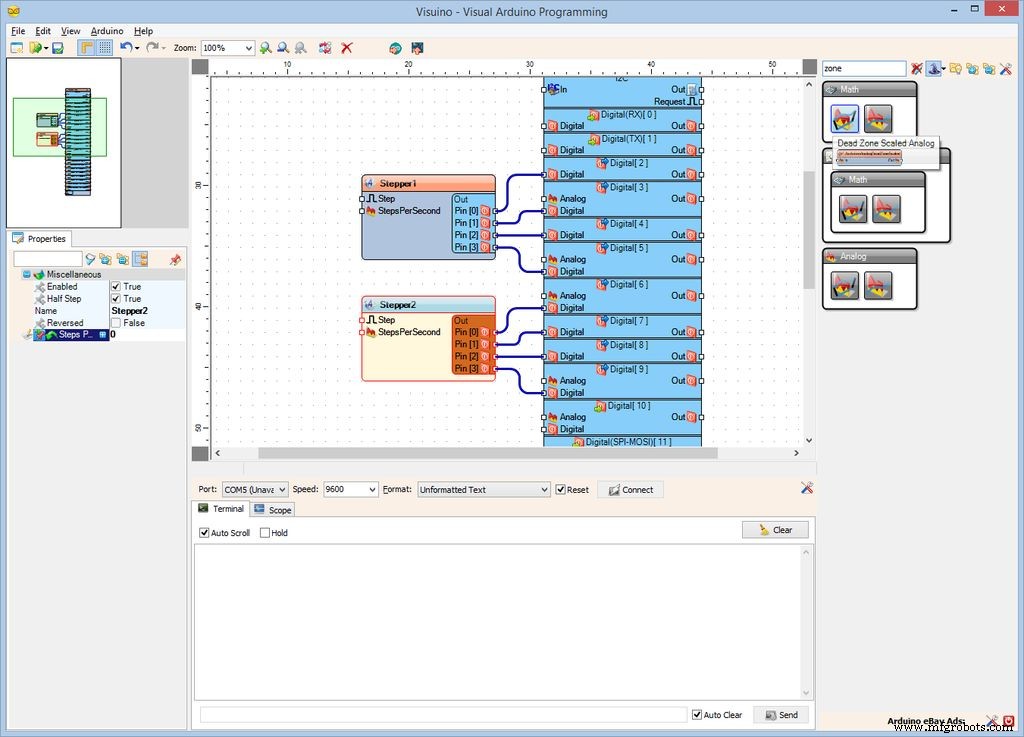
- Digite " etapa "na caixa de filtro da caixa de ferramentas de componentes e selecione" Motor de passo de 4 fios componente "( Figura 1 ) e solte dois deles na área de design
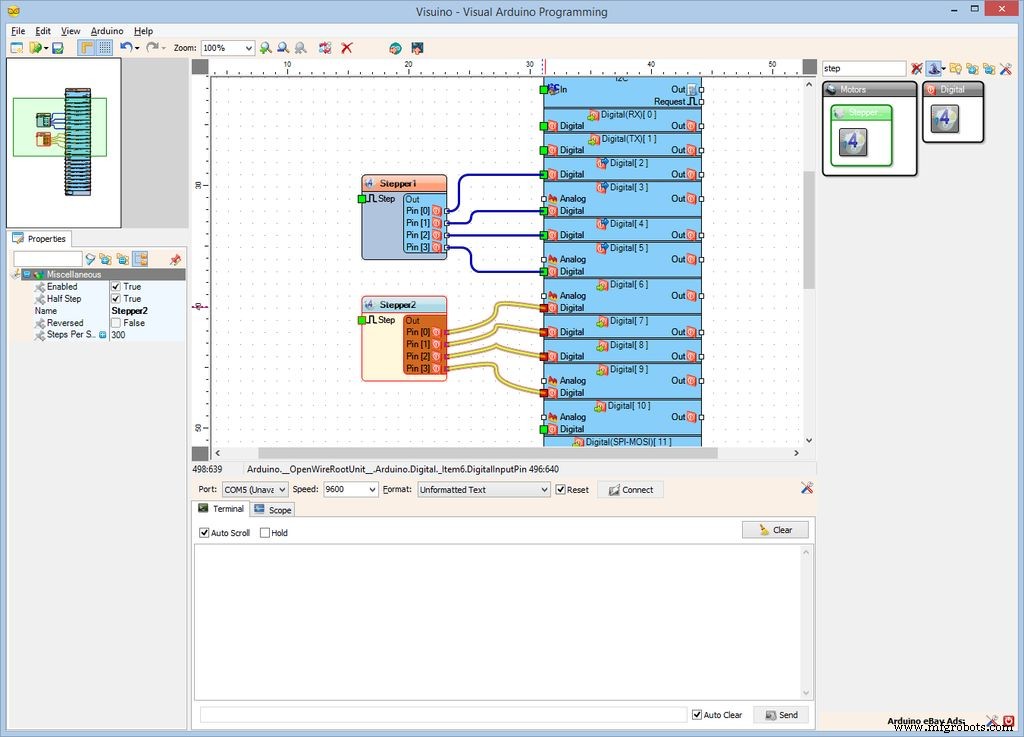
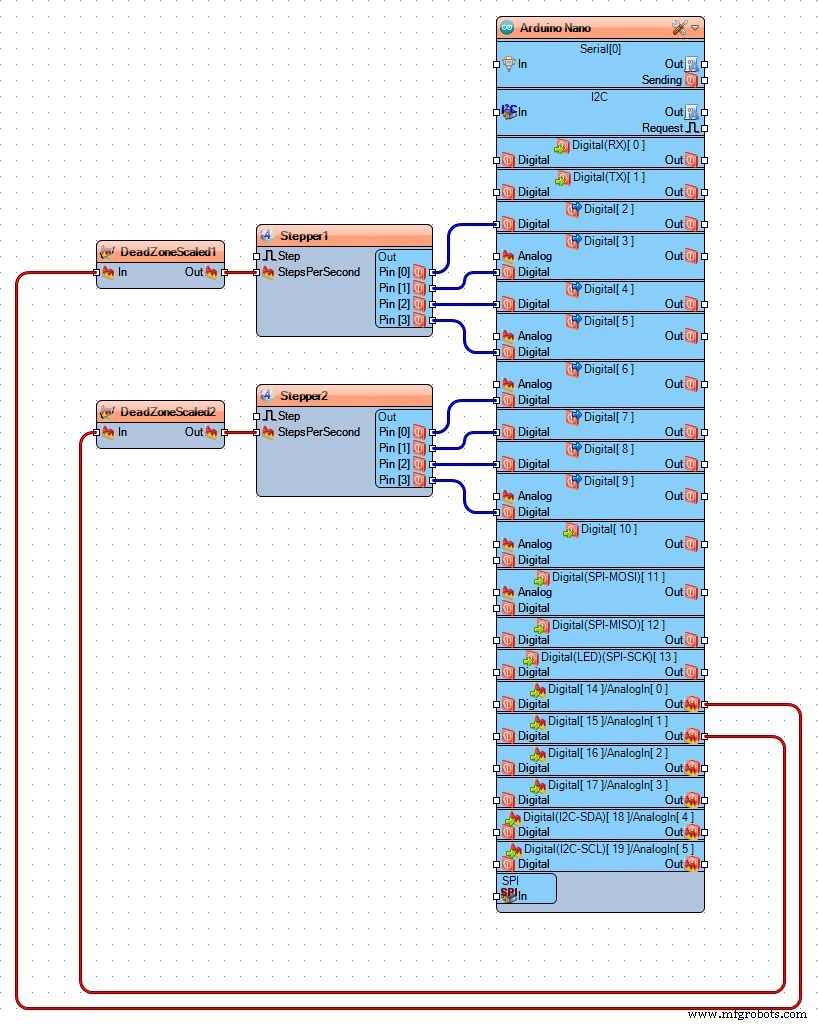
- Clique no link " Saída " caixa contendo os pinos do Stepper1 componente para começar a conectar todos os pinos de saída de uma vez ( Figura 2 )
- Mova o mouse sobre " Digital "pino de entrada do" Digital [2] "canal do Arduino componente. O Visuino espalhará automaticamente os fios para que eles se conectem corretamente ao restante dos pinos ( Figura 2 )
- Clique no link " Saída " caixa contendo os pinos do Stepper2 componente para começar a conectar todos os pinos de saída de uma vez ( Figura 3 )
- Mova o mouse sobre " Digital "pino de entrada do" Digital [6] "canal do Arduino componente. O Visuino espalhará automaticamente os fios para que eles se conectem corretamente ao restante dos pinos ( Figura 3 )
Etapa 7:no Visuino:defina as propriedades do componente motor de passo e adicione pinos para controlar a velocidade
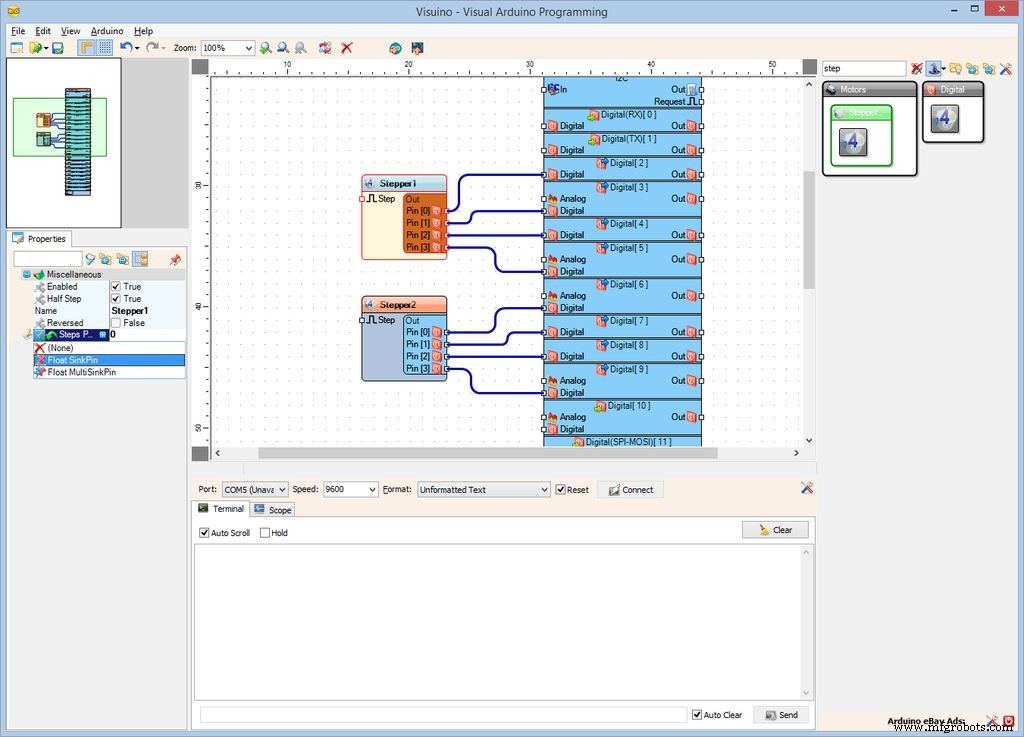
Como queremos controlar a velocidade dos steppers, precisamos adicionar pinos à propriedade "Steps Per Second":
- Selecione o Stepper1 componente ( Figura 1 )
- No Inspetor de objetos, defina o valor de " Etapas por segundo "propriedade para" 0 "( Imagem 1 )
- No Inspetor de objetos, clique em Fixar botão na frente de " Passos por segundo "propriedade e selecione" Float SinkPin "( Imagem 2 )
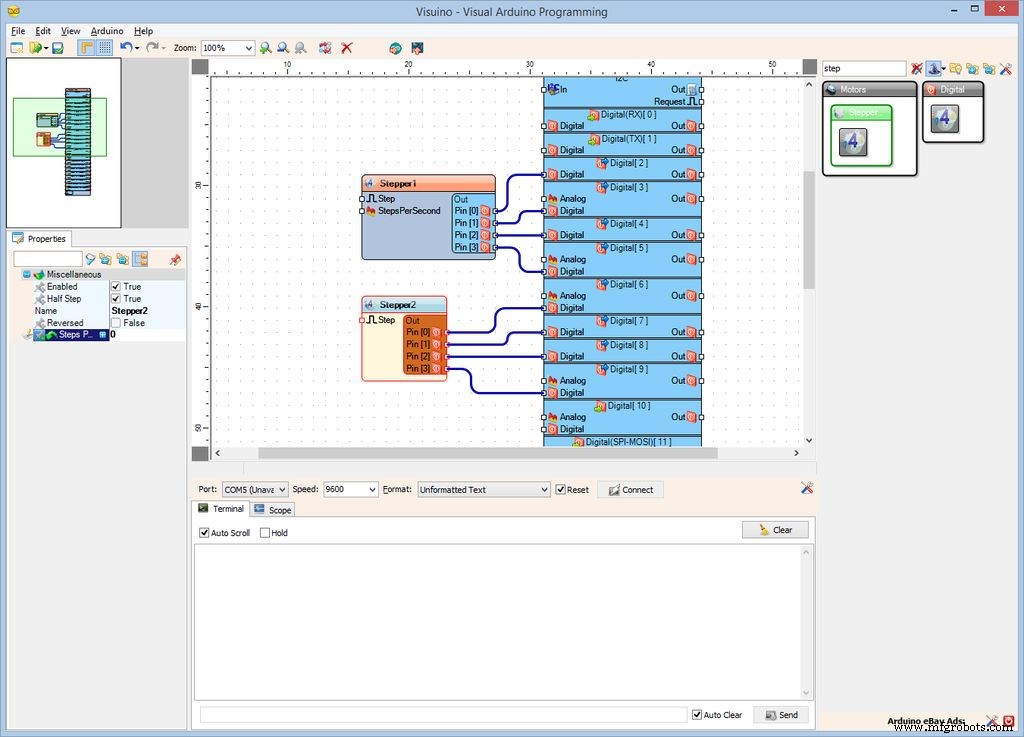
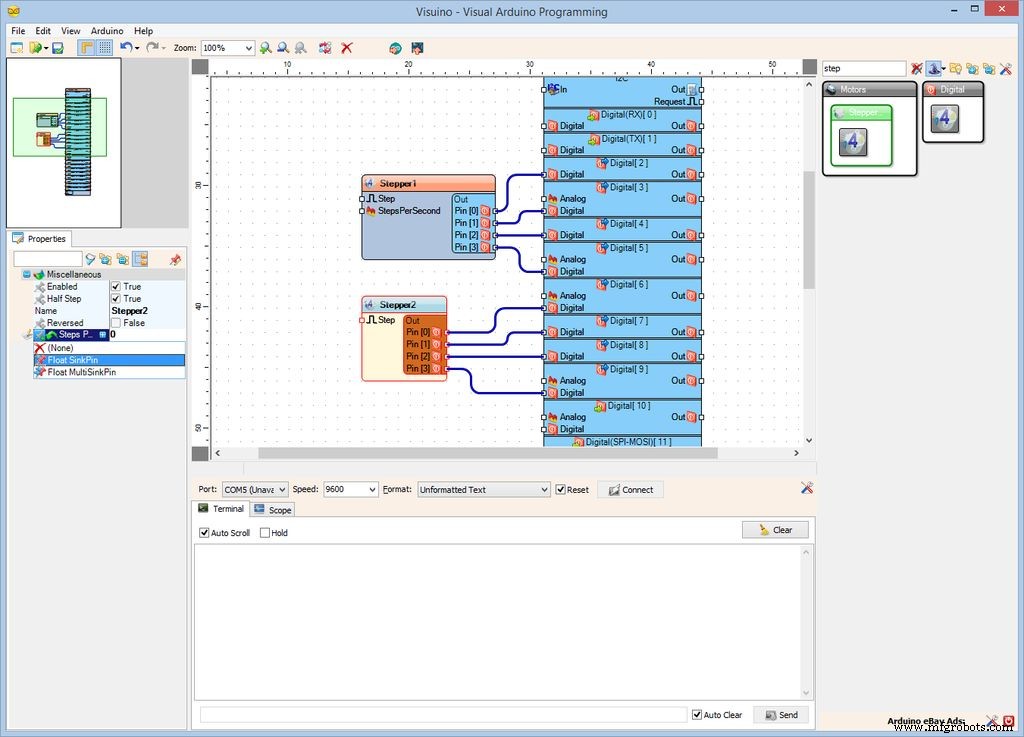
- Selecione o Stepper2 componente ( Figura 3 )
- No Inspetor de objetos, defina o valor de " Etapas por segundo "propriedade para" 0 "( Figura 3 )
- No Inspetor de objetos, clique em Fixar botão na frente de " Passos por segundo "propriedade e selecione" Float SinkPin "( Imagem 4 )
Etapa 8:No Visuino:adicione e conecte componentes analógicos com escala de zona morta
Os pinos analógicos onde o joystick está conectado geram valores normalizados entre 0,0 e 1,0. Precisamos convertê-los para +/- 300 passos por segundo. Como o joystick não é muito preciso quando liberado na posição central, queremos que uma pequena zona ao redor do centro seja considerada 0,5, portanto, precisamos introduzir a "Zona Morta":
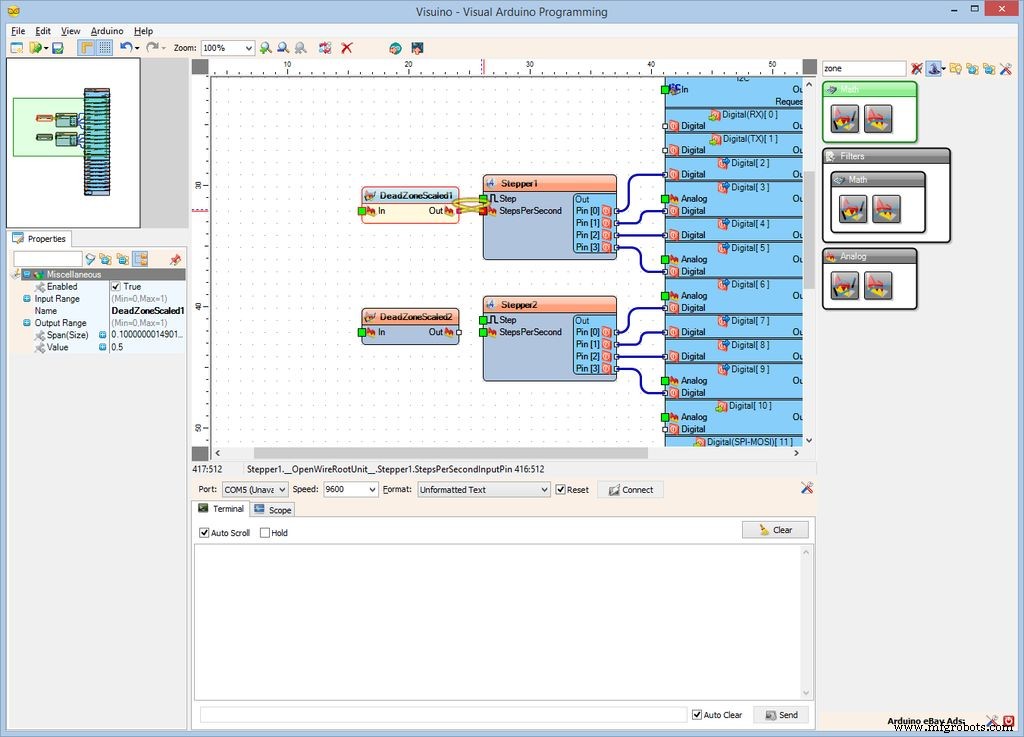
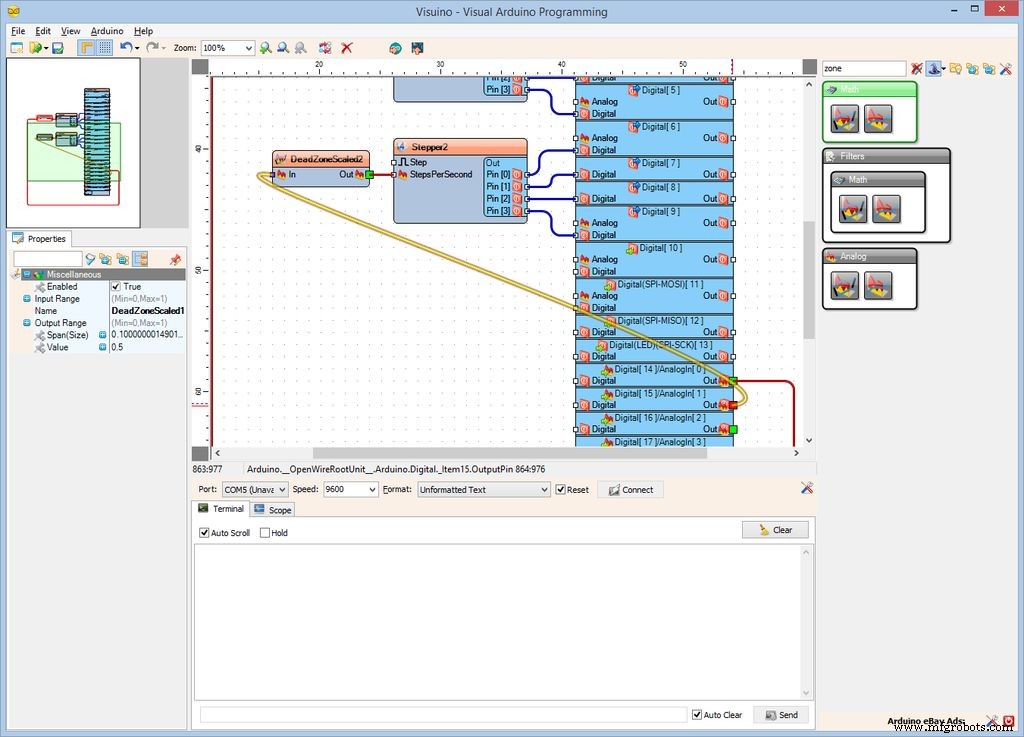
- Digite " zona "na caixa de filtro da caixa de ferramentas do componente e selecione" Zona morta analógica em escala componente "( Figura 1 ) e solte dois deles na área de design
- Conecte o " Saída "pino de saída do DeadZoneScaled1 componente para o " StepsPerSecond "pino de entrada do Stepper1 componente ( Figura 2 )
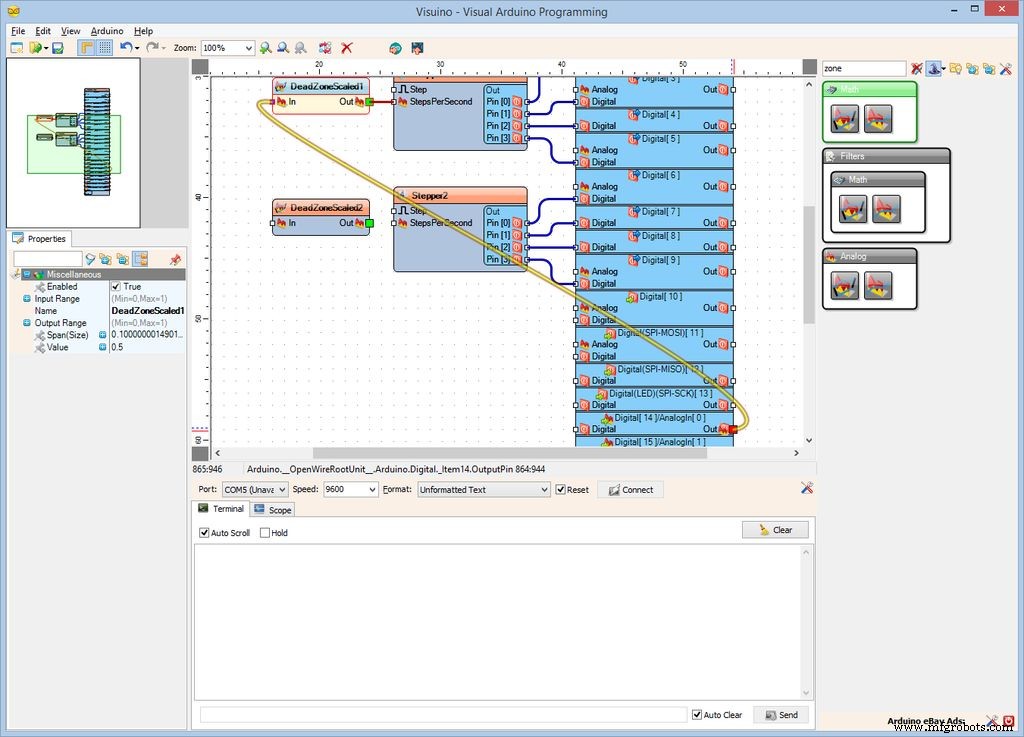
- Conecte o " Saída "pino de saída do" Digital [14] / Analógico [0] "canal do Arduino componente para o " In "pino de entrada do DeadZoneScaled1 componente ( Figura 3 )
- Conecte o " Saída "pino de saída do DeadZoneScaled2 componente para o " StepsPerSecond "pino de entrada do Stepper2 componente ( Figura 4 )
- Conecte o " Saída "pino de saída do" Digital [15] / Analógico [1] "canal do Arduino componente para o " In "pino de entrada do DeadZoneScaled2 componente ( Figura 5 )
Etapa 9:No Visuino:defina as propriedades dos componentes analógicos com escala da zona morta
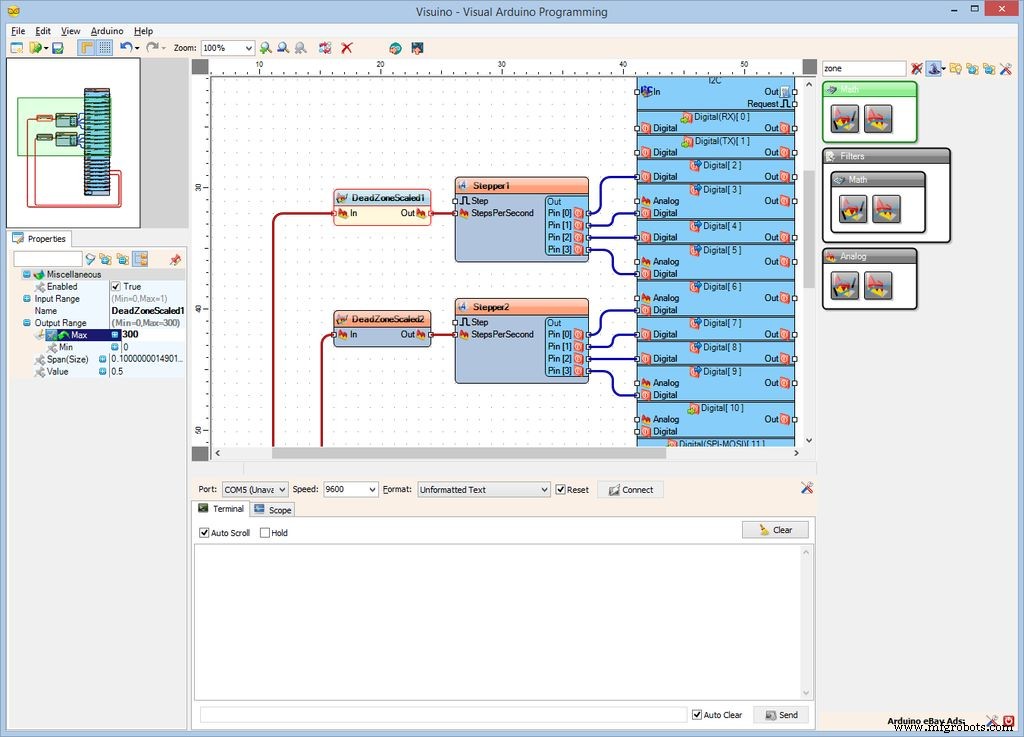
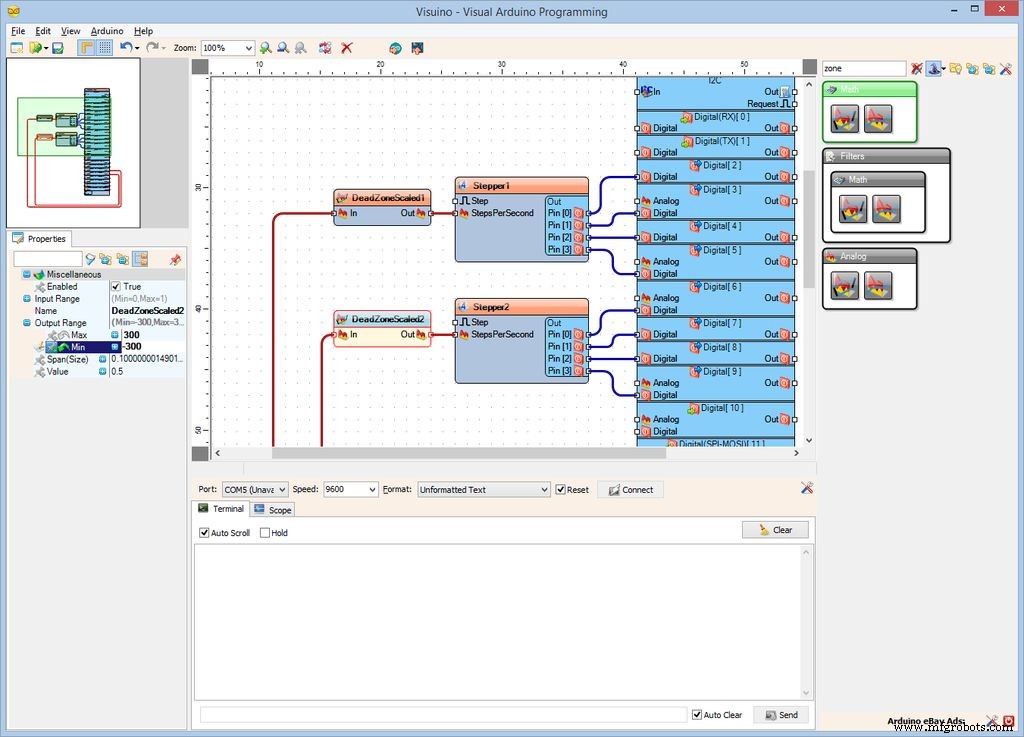
- Na área de design, selecione o DeadZoneScaled1 componente ( Figura 1 )
- No Inspetor de objetos, expanda o " Intervalo de saída "propriedade ( Figura 1 )
- No Inspetor de objetos, defina o valor de " Máx "subpropriedade do" Intervalo de saída "propriedade para" 300 "( Imagem 1 )
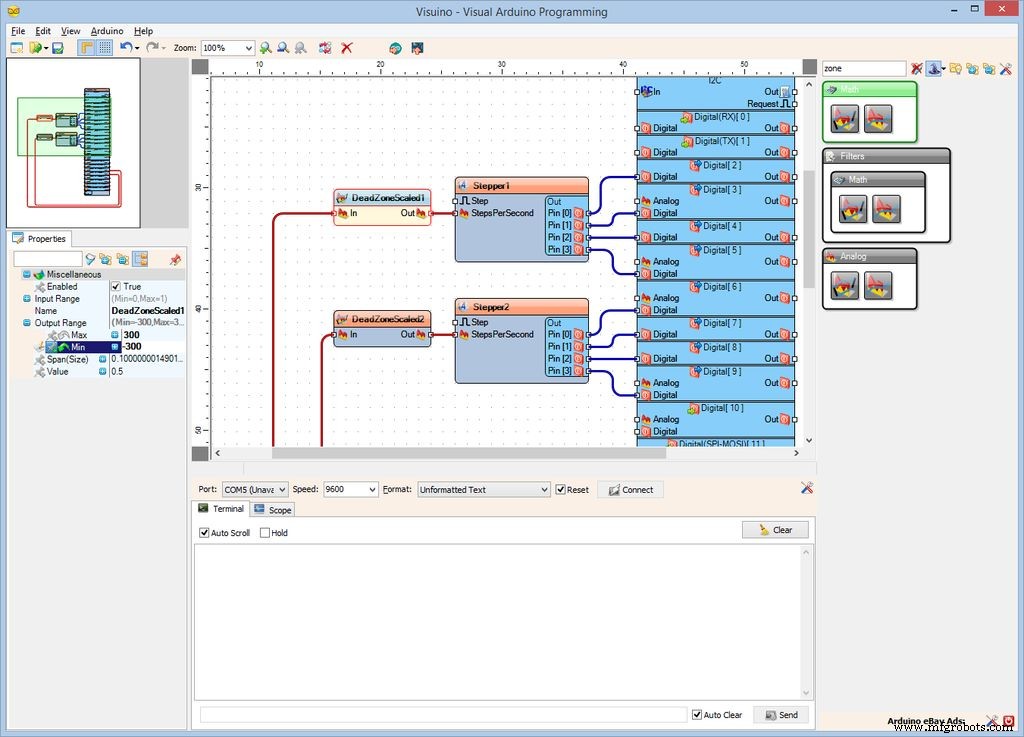
- No Inspetor de objetos, defina o valor de " Min "subpropriedade do" Intervalo de saída "propriedade para" -300 "( Imagem 2 )
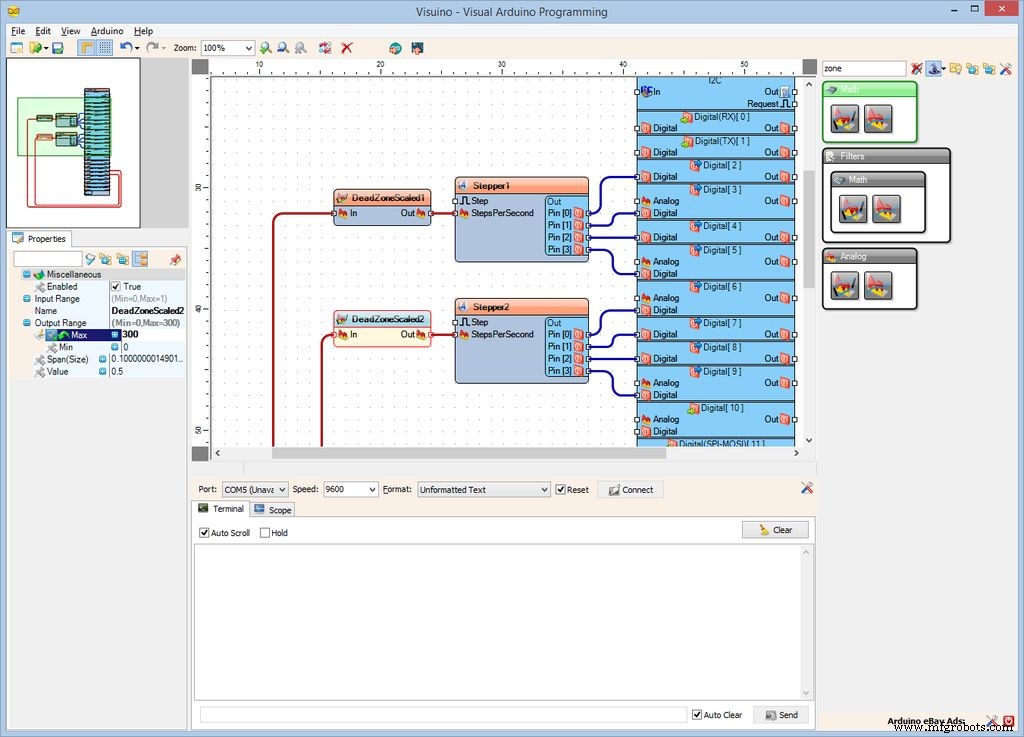
- Na área de design, selecione o DeadZoneScaled2 componente ( Figura 3 )
- No Inspetor de objetos, expanda o " Intervalo de saída "propriedade ( Figura 3 )
- No Inspetor de objetos, defina o valor de " Máx "subpropriedade do" Intervalo de saída "propriedade para" 300 "( Figura 3 )
- No Inspetor de objetos, defina o valor de " Min "subpropriedade do" Intervalo de saída "propriedade para" -300 "( Imagem 4 )
Etapa 10:gerar, compilar e fazer upload do código do Arduino
- No Visuino , Pressione F9 ou clique no botão mostrado na Figura 1 para gerar o código do Arduino e abrir o IDE do Arduino
- No Arduino IDE , clique em Upload botão, para compilar e enviar o código ( Figura 2 )
Etapa 11:e brincar ...

Parabéns! Você concluiu o projeto.
Foto 1 e o Vídeo mostrar o projeto conectado e ligado.
Você pode controlar os Steppers com o Joystick como visto no Vídeo . Movendo o Joystick para cima e para baixo irá controlar o Encaminhar e para trás rotação de um dos Steppers . Movendo o joystick para a esquerda e certo irá controlar o outro Stepper .
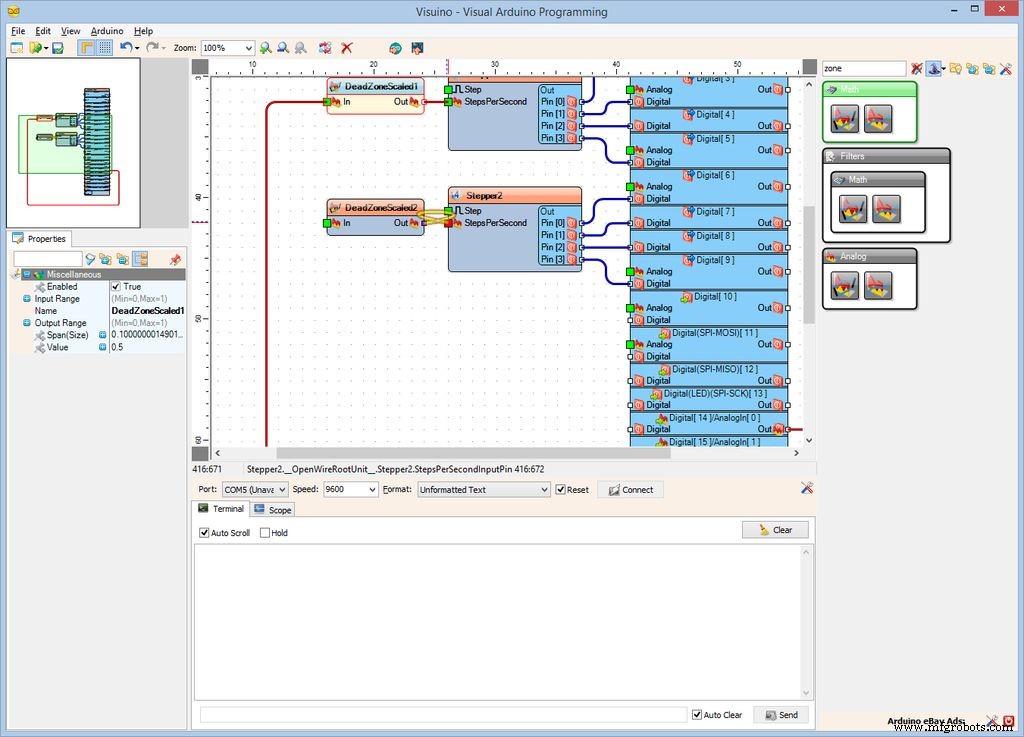
Na Imagem 2 você pode ver o Visuino completo diagrama.
Também anexado está o Visuino projeto, que criei para este Tutorial. Você pode fazer o download e abri-lo no Visuino :https://www.visuino.com
FQM7EG7IPOA2W5T.zip
Processo de manufatura
- Aceitar moeda de controle com Arduino
- Arduino com Bluetooth para controlar um LED!
- Determinando a saúde das plantas com TinyML
- Contador Geiger portátil com Arduino Nano
- ThimbleKrox - Controle do mouse com os dedos
- Joystick Arduino
- Controle uma barata com Arduino por menos de $ 30
- Controle do carro com Arduino Uno e Bluetooth
- Controlar Arduino Robot Arm com aplicativo Android
- Controle de ventilador PWM de 4 pinos de 25 kHz com Arduino Uno