


Robô Humanóide Inteligente Falante Apenas com Arduino!
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 |
Aplicativos e serviços online
 |
|
Sobre este projeto
Este Robô - Mofiza- (nome estranho) pode VER, FALAR e REAGIR ao seu redor. Antes de prosseguir, assista ao vídeo:
Desde que comecei a fazer robôs falantes, vi que as pessoas realmente usam outras placas de desenvolvimento em vez do Arduino para fazer robôs falantes. Mas é completamente possível fazer um robô Humanóide com Arduino que pode falar e adicionar muitos servos para fazê-lo se mover. Então, vamos começar:
Atualização (como eu fiz) -
Etapa 1:peças de que você precisa


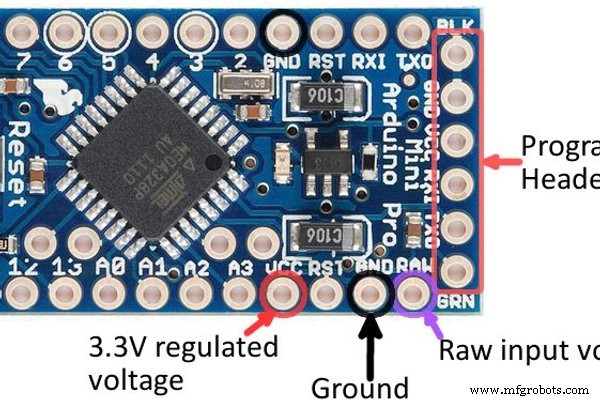
- Arduino Pro mini (5v 16 Mhz) [qualquer placa é boa, mas usei isso para torná-la pequena)
- Pinos de cabeçalho fêmeas para conexão no pcb
- Alfinetes de cabeçalho masculinos
- Placa Vero para fazer o circuito
- Módulo TF do cartão SD (para fazer falar)
- cartão micro SD (não mais de 2 GB)
- 3x sensor de proximidade IR
- 3x servo motor (usei micro servo sg90)
- Papelão para fazer o corpo
Etapa 2:conectar o sensor infravermelho e o corpo

Faça um corpo com o que quiser, eu fiz de papelão. É muito simples.
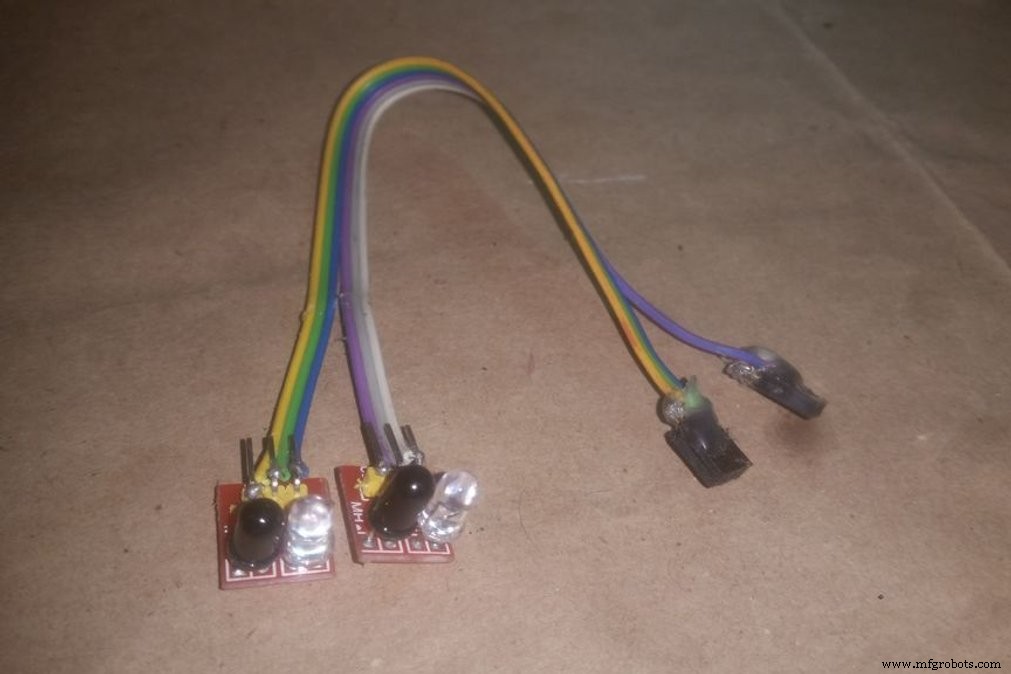
Soldei sensores infravermelhos com cabo plano assim com um conector fêmea em uma extremidade e adicionei dois em dois olhos e um no peito.
O robô dirá a mensagem de boas-vindas se detectar algo no sensor de tórax e dirá "aaaah .. não toque no meu olho" se algum sensor de olhos estiver alto. e o servo nessa área se moverá para cima.
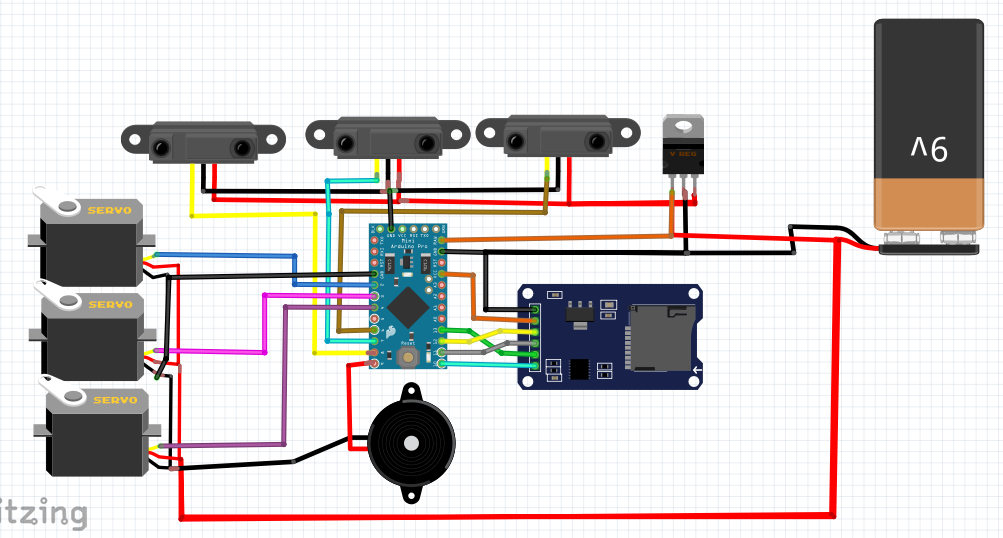
Etapa 3:o circuito
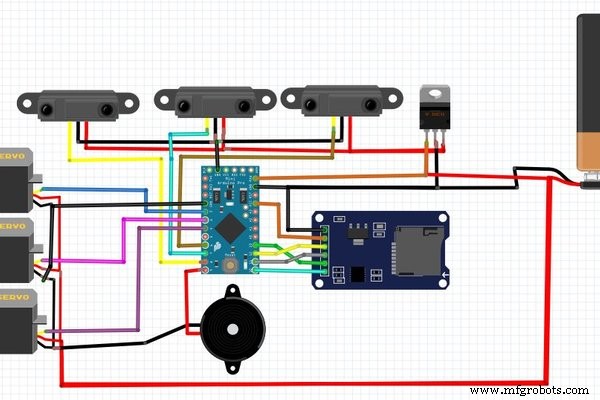
O circuito parece um pouco complicado, mas não, é muito fácil, você pode ligá-lo apenas com uma bateria. soldar o circuito e todos os outros componentes em uma placa vero e adicionar outro servo na cabeça e nas mãos.
Etapa 4:Código
Antes dos códigos:
Tive que usar duas bibliotecas para este robô.
TMRpcm.h - para reproduzir áudio do cartão SD- fale https://github.com/TMRh20/TMRpcm
ServoTimer2.h - evite conflito com TMRpcm e execute servo motores usando timer2, pois TMRpcm usa Timer1 no arduino. https://create.arduino.cc/projecthub/ashraf_minhaj/how-to-use-servotimer2-library-simple-explain-servo-sweep-512fd9?ref=user&ref_id=507819&offset=1
Este é o código para dizer bem-vindo. Você pode fazer seu próprio ambiente e código. Antes de chegar ao código, você terá que adicionar a biblioteca ServoTimer2. Nem o robô não vai funcionar.
E então o código:
#include "ServoTimer2.h" # include # define SD_ChipSelectPin 10 # include "TMRpcm.h" #includeTMRpcm tmrpcm; ServoTimer2 matha; ServoTimer2 lhand; ServoTimer2 rhand; int in1 =6; int in2 =7 int; in3 =8; configuração de vazio () {matha.attach (2); lhand.attach (3); rhand.attach (4); tmrpcm.speakerPin =9; Serial.begin (9600); if (! SD.begin (SD_ChipSelectPin)) {Serial.println ("SD FALHA"); Retorna; }} void loop () {if (! (digitalRead (in3))) {tmrpcm.play ("welcome.wav"); lhand.write (2500); atraso (2000); lhand.write (1200); // atraso da posição do handshake (9000); } else {lhand.write (300); rhand.write (1700); matha.write (1500); }}
Etapa 5:Concluir
Agora basta ligá-lo e pronto. Um robô inteligente é feito. [Vou enviar outras fotos e detalhes em breve]
Se eu conseguisse mais alfinetes, faria o robô andar. mas eu tinha apenas 3 pinos restantes (digital). É menos do que preciso.
Apoie-me inscrevendo-se no meu canal no YouTube.
Código
- mofiza.welcome.code
mofiza.welcome.code C / C ++
#include "ServoTimer2.h" # include # define SD_ChipSelectPin 10 # include "TMRpcm.h" #includeTMRpcm tmrpcm; ServoTimer2 matha; // matha significa HEADServoTimer2 lhand; ServoTimer2 rhand; int in1 =6; int in2 =7; int in3 =8; void setup () {matha.attach (2); lhand.attach (3); rhand.attach (4); tmrpcm.speakerPin =9; Serial.begin (9600); if (! SD.begin (SD_ChipSelectPin)) {Serial.println ("SD FALHA"); Retorna; }} void loop () {if (! (digitalRead (in3))) {tmrpcm.play ("welcome.wav"); lhand.write (2500); atraso (2000); lhand.write (1200); // atraso da posição do handshake (9000); } else {lhand.write (300); rhand.write (1700); matha.write (1500); }} mofiza.fullCode.v1.1
https://github.com/ashraf-minhaj/Mofiza--Humanoid-social-robotEsquemas
Processo de manufatura
- Construa seu robô de streaming de vídeo controlado pela Internet com Arduino e Raspberry Pi
- Smart Blinds
- Aceitar moeda de controle com Arduino
- Obstáculos para evitar o robô com servo motor
- Arduino com Bluetooth para controlar um LED!
- Robô seguidor de linha
- Controle de um robô Roomba com Arduino e dispositivo Android
- Robô controlado por fala
- Controlar Arduino Robot Arm com aplicativo Android
- Multiplexador de carregador de bateria inteligente com Smart Display