


Arduino / Android - BLUETOOTH Multi Servo Motor Control
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Sobre este projeto

Olá Mundo! Eu fiz um aplicativo de controle 1 servo ontem e disse que faria um controle múltiplo, então aqui está o aplicativo de controle múltiplo! Eu também fiz um código Arduino melhor. Siga a próxima etapa para o esquema, código, lista de peças e aplicativo.
Instale o aplicativo: GOOGLE PLAY
Contacte-me se quiser o código-fonte!
Etapa 1:lista de peças
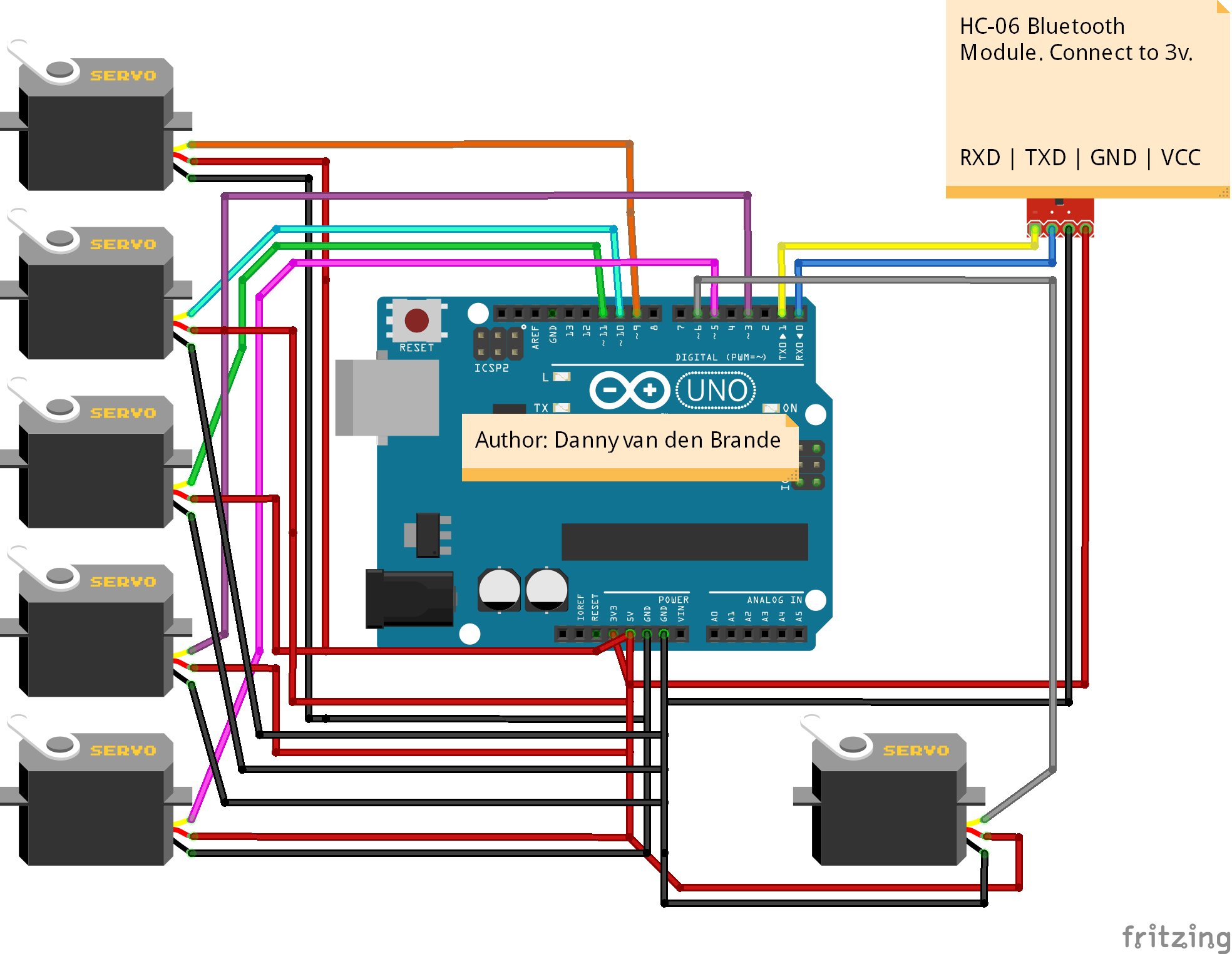
Conecte tudo como no esquema, carregue o código, baixe o aplicativo, conecte o Bluetooth após emparelhar os dispositivos e deve funcionar. Certifique-se de conectar RXD a TX e TXD a RX.
Certifique-se também de NÃO conectar o módulo Bluetooth ao fazer o upload.
Lista de peças:
- Arduino Uno, ( Use um Mega se quiser usar mais de 6 Servos!) Eu usei o RobotDyn Uno.
- Módulo Bluetooth HC-06, ou qualquer outro.
- 6 x servo motor. ( Pode testar com um para, é claro )
- Fios de jumpers conjunto MM / FF / MF
- telefone Android.
Boa sorte!
Siga a próxima etapa para descobrir como alterar o nome, pino e taxa de transmissão do seu módulo Bluetooth. ( opcional )
Etapa 2:como alterar o nome do seu HC-06
O que é necessário?
- 1 x USB para programador de microcontrolador TTL para conectar ao seu HC-06
Como conectar o programador?
- VCC para VCC
- GND para GND
- RXD para TX
- TXD para RX
Vamos começar:
- Conecte o programador USB TTL ao HC-06.
- Conecte o USB e abra o IDE do Arduino.
- Abra o monitor serial.
- Digite "AT" sem aspas. Você deve ver uma resposta no monitor serial dizendo "OK".
- Digite "AT + NAMExyz". Define o nome do módulo como “xyz” (substitua xyz pelo nome que você deseja.) A resposta deve ser OKsetname.
- Digite "AT + PIN1234". Define o pino como 1234 (substitua 1234 pelo pino desejado) e a resposta deve ser OKsetPIN. Para obter mais informações sobre como alterar a taxa de transmissão, etc., incluí um arquivo PDF. Boa sorte!
Código
- BLUETOOTH_Servo_Control_Multi_Servo.ino
BLUETOOTH_Servo_Control_Multi_Servo.ino Arduino
Código para controlar vários servos./ * Autor:Danny van den Brande.Com este código você pode controlar vários servo motores usando um aplicativo Android. Você pode adicionar quantos quiser até que seus pinos acabem. Você pode adicionar mais Servos no código. Se você quiser o código-fonte do aplicativo, entre em contato comigo. * / # includeServo myservo1, myservo2, myservo3, myservo4, myservo5, myservo6, myservo7, myservo8, myservo9, myservo10; byte serialA; void setup () {myservo1.attach (9); myservo2.attach (10); myservo3.attach (11); myservo4.attach (3); myservo5.attach (5); myservo6.attach (6); // myservo7.attach (); preencha os números dos pinos se você usar mais de 6 servos i deixei-os em branco // myservo8.attach (); // myservo9.attach (); // myservo10.attach (); Serial.begin (9600); // altere sua taxa de transmissão para a taxa de transmissão de seus módulos Bluetooth, se necessário.} Void loop () {if (Serial.available ()> 2) {serialA =Serial.read (); Serial.println (serialA );} {servopos int sem sinal =Serial.read (); unsigned int servopos1 =Serial.read (); sem sinal int realservo =(servopos1 * 256) + servopos; Serial.println (realservo); if (realservo> =1000 &&realservo <1180) {int servo1 =realservo; servo1 =mapa (servo1, 1000,1180,0,180); myservo1.write (servo1); Serial.println ("servo 1 ON"); atraso (10); } if (realservo> =2000 &&realservo <2180) {int servo2 =realservo; servo2 =mapa (servo2,2000,2180,0,180); myservo2.write (servo2); Serial.println ("servo 2 ligado"); atraso (10); } if (realservo> =3000 &&realservo <3180) {int servo3 =realservo; servo3 =mapa (servo3, 3000, 3180,0,180); myservo3.write (servo3); Serial.println ("servo 3 ligado"); atraso (10); } if (realservo> =4000 &&realservo <4180) {int servo4 =realservo; servo4 =mapa (servo4, 4000, 4180,0,180); myservo4.write (servo4); Serial.println ("servo 4 ligado"); atraso (10); } if (realservo> =5000 &&realservo <5180) {int servo5 =realservo; servo5 =mapa (servo5, 5000, 5180,0,180); myservo5.write (servo5); Serial.println ("servo 5 ligado"); atraso (10); } if (realservo> =6000 &&realservo <6180) {int servo6 =realservo; servo6 =mapa (servo6, 6000, 6180,0,180); myservo6.write (servo6); Serial.println ("servo 6 ligado"); atraso (10); } // if (realservo> =7000 &&realservo <7180) {// UNCOMMENT se estiver usando mais de 6 Servos.// int servo7 =realservo; // servo7 =map (servo7, 7000, 7180,0,180); // myservo7 .write (servo7); // Serial.println ("servo 7 On"); // delay (10); //} //// if (realservo> =8000 &&realservo <8180) {// int servo8 =realservo; // servo8 =map (servo8, 8000, 8180,0,180); // myservo8.write (servo8); // Serial.println ("servo 8 ligado"); // delay (10); //} / /// if (realservo> =9000 &&realservo <9180) {// int servo8 =realservo; // servo8 =map (servo9, 9000, 9180,0,180); // myservo8.write (servo8); // Serial. println ("servo 9 On"); // delay (10); //} //// if (realservo> =10000 &&realservo <10180) {// int servo10 =realservo; // servo10 =map (servo10, 10000, 10180,0,180); // myservo10.write (servo10); // Serial.println ("servo 10 On"); // delay (10); //}}}
Esquemas
Processo de manufatura
- Robô Pi Simples
- Controle remoto universal usando Arduino, 1Sheeld e Android
- Arduino Control Center
- Brinquedo controlado pelo Android usando Raspberry Motor Shield
- Obstáculos para evitar o robô com servo motor
- Arduino com Bluetooth para controlar um LED!
- Controle do umidificador Arduino
- Controle do Servo Motor com Arduino e MPU6050
- O que é um servo motor?
- O que é servo motor redutor?