


Automação de porta deslizante
Componentes e suprimentos
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Sobre este projeto
Visão geral do projeto
Neste projeto, utilizo o poder do Arduino para criar um circuito para alimentar uma porta deslizante. O principal objetivo deste projeto é utilizar uma porta deslizante morta com um motor AC funcionando e automatizar o sistema usando um Arduino, um par de relés, um receptor de 433 MHz, um transmissor de 433 MHz e algumas habilidades elétricas engenhosas. O sistema cria um método para alimentar o motor do portão quando necessário e para decidir se deve abrir ou fechar o portão.
O Arduino escuta constantemente uma resposta definida do transmissor, neste caso é o controle remoto usado para abrir ou fechar o portão. O transmissor opera em dois canais, onde cada canal tem seu próprio ID exclusivo. Uma vez que esse ID é recebido pelo receptor de 433 MHz, ele envia um sinal para o Arduino que controla os relés para alimentar o motor.
Metodologia
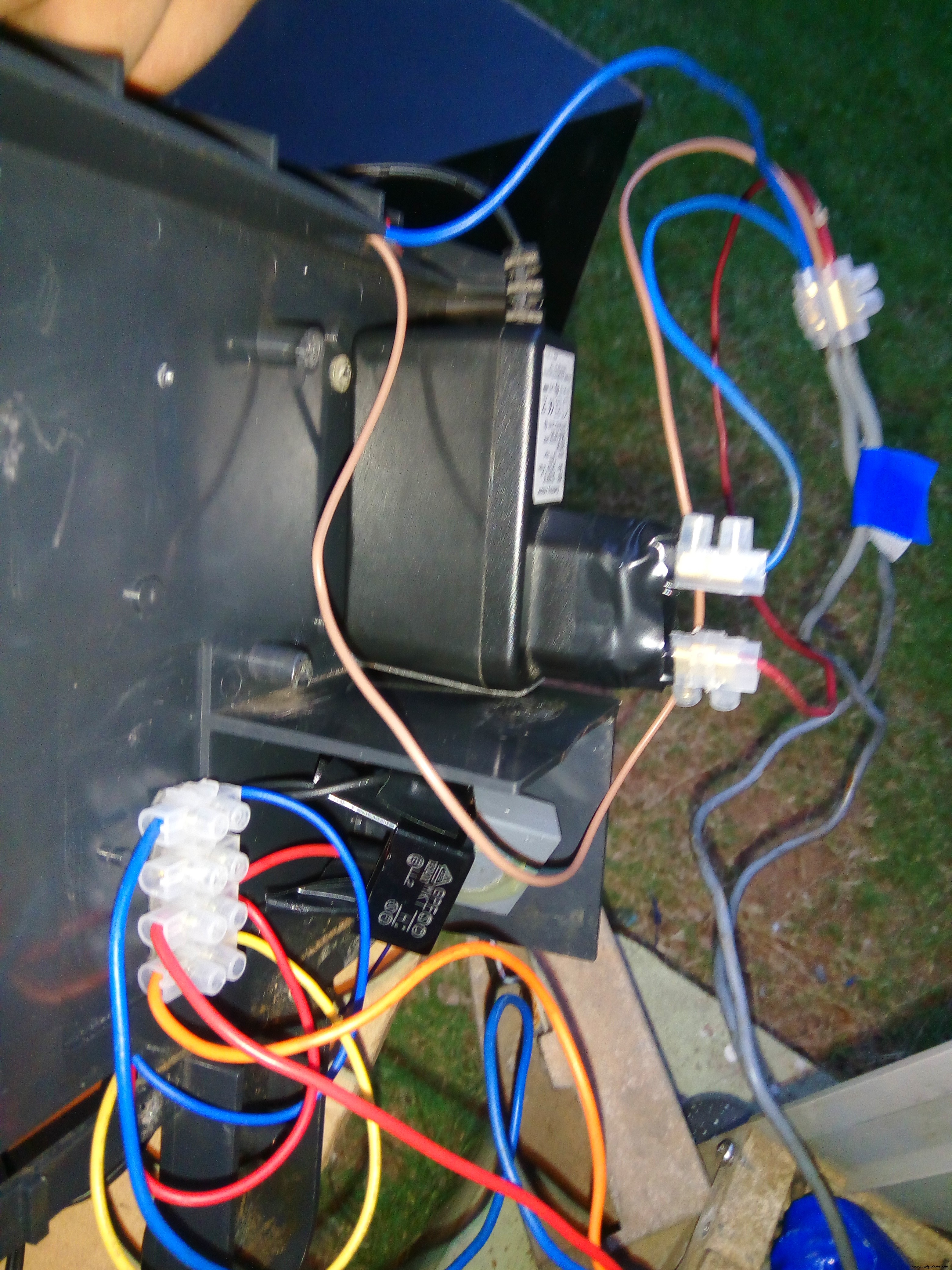
Etapa 1:Ligar o motor
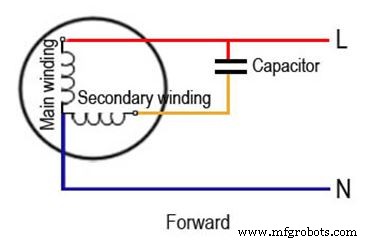
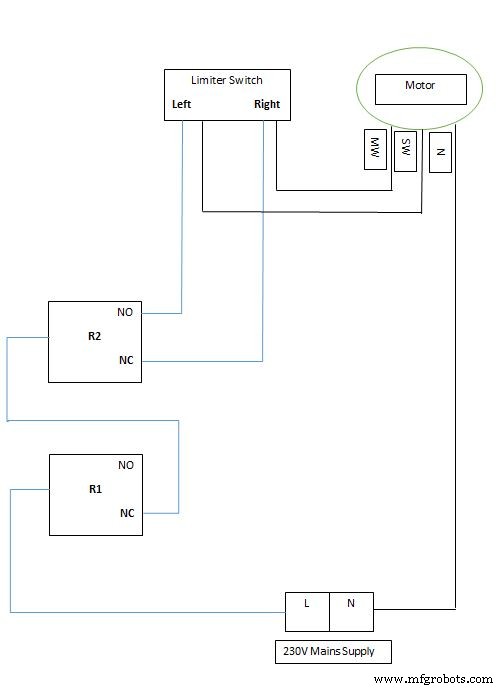
A configuração para alimentar o motor é mostrada abaixo. Para que o motor mova o portão na direção para frente (fechar), o enrolamento principal deve ser conectado à energia principal.
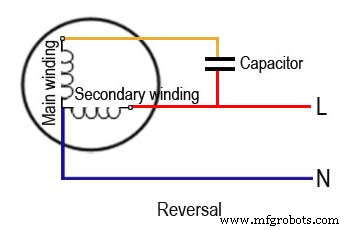
Para que o motor se mova na direção oposta (aberta), o enrolamento secundário deve ser conectado à alimentação principal.
É necessário identificar qual fio corresponde a qual enrolamento. Normalmente os fios não são etiquetados e isso pode ser identificado com tentativa e erro fornecendo energia CA ao fio.
No meu caso, estava trabalhando com um motor 220 ~ 240VAC. Consegui identificar o fio neutro facilmente, pois era da cor azul, que é uma cor padrão usada para indicar o terminal neutro.
Em seguida, conectei o terminal Live ao fio vermelho, o que fez o motor girar para frente. Isso indicou que eu forneci energia para o Enrolamento Principal do motor.
Nota: Certifique-se de que o capacitor de partida está conectado corretamente e funcionando. Isso garante que o motor tenha torque de partida adequado.
Etapa 2:Parando o motor
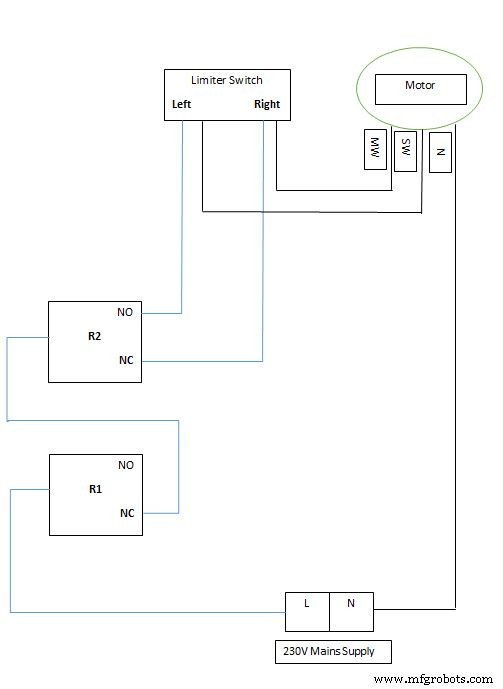
A alimentação da rede elétrica é fornecida ao motor por meio de uma chave limitadora. Assim que o portão atinge uma extremidade, o interruptor limitador é acionado, o que abre o circuito e interrompe o fornecimento de energia ao motor.
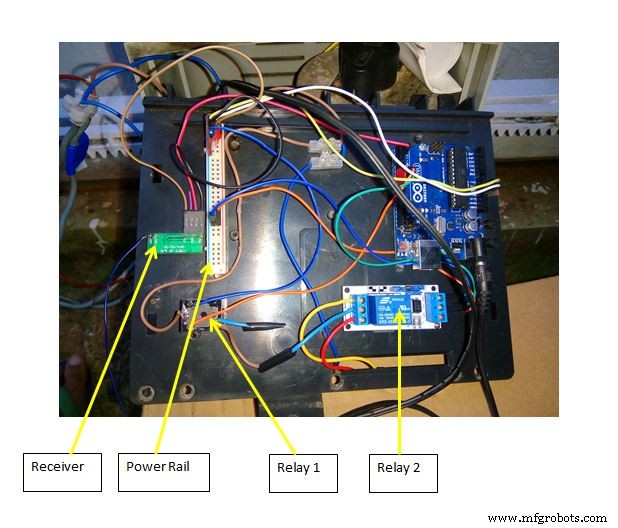
Etapa 3:Uso de relés para controlar o motor
O relé possui dois pontos de contato; Normalmente aberto e normalmente fechado.
O caminho normalmente fechado é usado para alimentar o enrolamento principal do motor. Isso foi escolhido para garantir que, quando o sistema fosse reiniciado ou se algo desse errado no sistema, o motor garantisse que o portão fosse mantido fechado o tempo todo.
O caminho normalmente aberto é usado para alimentar o enrolamento secundário do motor. O caminho normalmente aberto é fechado quando a bobina dentro do relé é energizada. Isso pode ser feito enviando um sinal de 5 V do Arduino, pois os relés usados estão operando abaixo de 5 V.
Ao usar dois caminhos para a potência, o motor garante que a energia não seja fornecida simultaneamente para os enrolamentos principal e secundário do motor.
Este Relé ( R2 ) é operado através do pino 8 do Arduino.
Um segundo relé ( R1 ) é usado para interromper o circuito para que o motor pare se o Arduino receber o comando do receptor enquanto o portão está se movendo.
O Arduino verifica constantemente se o receptor recebeu algum comando. Assim que um comando é emitido, o Arduino redireciona a energia para o motor para que ele feche ou abra o portão.
O objetivo principal do segundo relé é dar ao sistema tempo suficiente para redirecionar o sistema para alimentar o motor sem alterar instantaneamente a direção em que o motor está girando. Assim que o reencaminhamento for concluído, o relé desliga e a energia é fornecida ao motor para girar na direção oposta.
Este relé é operado através do pino 9 do Arduino.
Objetivo do segundo relé
Se o sistema estiver na metade do processo de fechamento do portão e receber o comando do receptor para abrir o portão, o relé será ativado para redirecionar a energia para o enrolamento secundário. Desde que isso acontece quase que instantaneamente, o relé está sob pressão constante da tensão reversa gerada pelo motor devido à falha repentina de energia no enrolamento principal. Além disso, danificar os contatos do relé permanentemente se for continuamente pressionado.
Com a ajuda de um relé adicional, a alimentação do motor é desconectada e dá ao sistema um tempo de 10 segundos para redirecionar a alimentação para os enrolamentos necessários. Isso reduz o estresse nos contatos do relé e aumenta sua vida útil.
Método de proteção de relé:
Capacitores de supressão
Quando um motor CC é interrompido repentinamente, um loop de corrente negativo é criado pela bobina do motor, isso se deve às propriedades indutivas de uma bobina. No entanto, isso pode ser neutralizado pela instalação de um diodo de feedback para fornecer um caminho para o fluxo da corrente negativa.
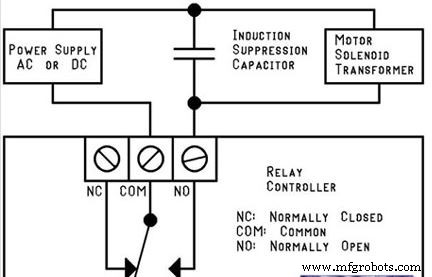
Quando um motor CA é interrompido repentinamente por meio de uma chave, ele cria um aumento de alta tensão nos contatos da chave.
Os capacitores de supressão são usados para evitar o aumento de alta tensão nos contatos do relé quando o motor é instruído a operar na direção oposta. Isso protege os contatos de retardo.

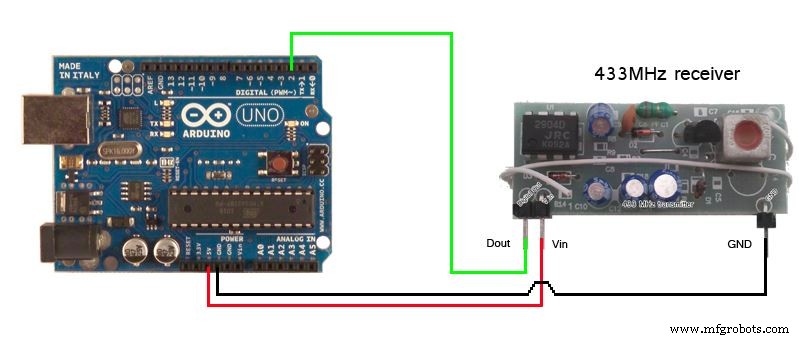
Etapa 4:Para configurar o receptor
O receptor opera a 433 MHz, o programa do Arduino está continuamente em loop para verificar a porta de sinal do receptor. Assim que o sinal correto for recebido, o Arduino ativa o Relé 1 (R1) para que o Relé 2 (R2) direcione a energia para o motor.
Quando os dados são enviados do transmissor, são recebidos pelo receptor na forma de um número inteiro. No meu caso, usando o monitor serial do Arduino, fui capaz de ver o valor que o receptor foi capaz de captar.
As principais razões para usar uma frequência de rádio mais alta para comunicação é que a faixa de operação é alta e o sinal é recebido pelo receptor mesmo se houver alguns obstáculos bloqueando o sinal. Isso só pode ser alcançado por ondas de rádio de alta frequência.
No meu projeto, consegui um raio de trabalho de cerca de 30 pés para o sistema ativar.
Nota: O raio de funcionamento do sistema pode ser expandido em alguns pés soldando um longo pedaço de fio à Antena porta no módulo receptor.

Vídeo de demonstração
Instantâneos do projeto final
Esquemas
Processo de manufatura
- RASPBERRY PI HOME AUTOMATION
- Protótipo da Raspoulette
- Força do vento
- Guia para martelos elétricos
- Centro de giro com motor de eixo de alto torque e 75 HP
- Indústria 4.0 na manufatura:o poder crescente da automação
- O que é um Motor Linear?
- Entendendo a Automação de Imprensa
- O que é um servo motor?
- O que é um Power Chuck?