


Transforme seu carro RC em carro RC Bluetooth
Componentes e suprimentos
 |
| × | 1 | |||
 |
| × | 1 |
Ferramentas e máquinas necessárias
 |
|
Aplicativos e serviços online
| |
|
Sobre este projeto




Os carros RC são realmente divertidos de hackear e fornecem um bom chassi por um preço baixo, para fazer robôs, mas selecionar um para fazer é uma dor de cabeça para milhões de tipos. Meu irmãozinho fez aniversário recentemente e eu queria dar a ele algo muito legal, acabei dando a ele este carro rc. Hackear carros RC é fácil e difícil também, por causa da maneira diferente como os carros rc são feitos, não é uma maneira fácil e definida de hackear o carro, mas esse hack é universal. Também tentarei abordar o básico sobre todas as partes e a teoria por trás de cada módulo. Usamos módulo, mas você é incentivado a fazer nosso circuito, exceto o pro mini.
Fiquei muito desconfortável com o promini, pois era muito pequeno, mas era divertido.
Confira o vídeo e certifique-se de se inscrever para os próximos vídeos
Etapa 1:obtendo o chassi certo



Lista de Peças
- ProMini
- módulo L293d
- hc-05
- carro Rc
Obtendo o chassi certo
Para escolher o chassi é uma questão sobre o mecanismo de acionamento, existem muitos mecanismos de acionamento.
Vamos falar sobre os dois mecanismos mais populares.
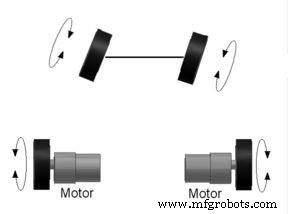
Unidade diferencial O que é unidade diferencial?
O termo diferencial significa diferença entre duas entidades, no contexto da robótica é apenas a diferença de velocidade entre dois motores. Com base nessa diferença de velocidade, um robô pode ser movido em qualquer direção em um layout 2D.
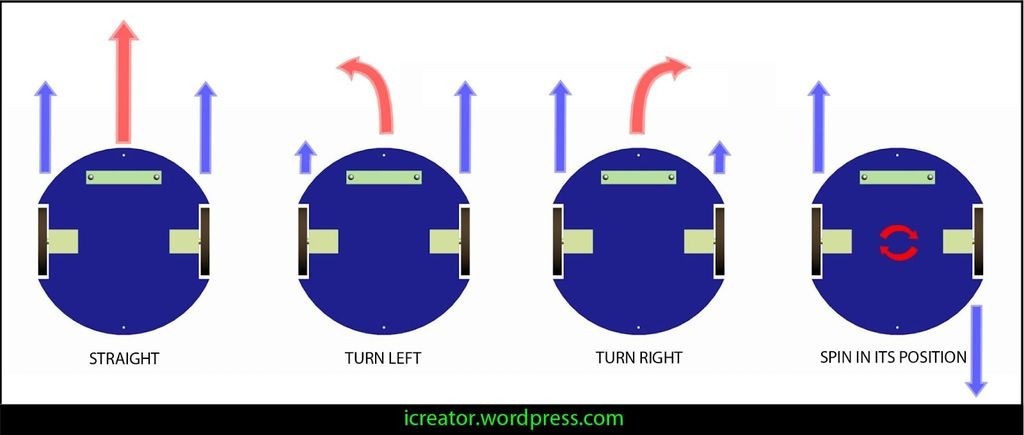
Quando dois motores são conectados a rodas em uma linha, opostos um ao outro (assim como um par de rodas conectadas a um único eixo), a velocidade com que cada motor gira determina a direção do movimento. Quando ambas as rodas giram na mesma velocidade, a diferença entre os motores é zero. Isso faz com que o robô se mova para frente em uma linha reta. O robô pode se mover na direção reversa se a direção de rotação de ambos os motores for invertida. Isso será novamente em linha reta se a diferença de velocidade for zero. Agora, mudar a velocidade de qualquer motor resultará em um movimento na direção contrária à linha reta. Por exemplo, reduzir a velocidade do motor correto resultará em uma diferença de velocidade e, portanto, na mudança de direção. A força resultante é tal que o robô vira para a direita. Essa mudança de direção pode ser controlada para o ângulo necessário reduzindo ainda mais a velocidade do motor. Quanto mais lento é o motor certo, mais acentuada é a curva para a direita. Este é exatamente o mesmo para virar à esquerda.
Como conclusão, motor direito mais lento, curva mais fechada à direita. Motor esquerdo mais lento. Curva mais acentuada à esquerda. Abaixo estão alguns cenários que explicam o funcionamento do mecanismo de acionamento diferencial. M1 e M2 são motores que acionam rodas à esquerda e à direita, respectivamente.
Direção do tipo direção
O que é o tipo de direção de direção?
O tipo de unidade de carro é o mais comum no mundo real, mas não no mundo do robô. É caracterizado por um par de rodas motrizes e um par separado de volantes. A translação e a rotação são independentes uma da outra. Mas a translação e a rotação estão interligadas, portanto, este sistema enfrenta graves problemas de planejamento de caminho. Quatro rodas são mais eficientes em comparação com três ou duas rodas. As duas primeiras das quatro rodas podem ser usadas para dirigir e as próximas duas para conduzir o robô. Equilibrar um robô de quatro rodas nunca é um problema. A maioria dos carros que usamos no dia-a-dia são de quatro rodas e o exemplo é suficiente para provar sua existência e capacidades.
Desvantagens da direção do tipo carro :O mecanismo de rotação deve ser controlado com precisão. Uma ligeira imprecisão pode causar grandes erros de odometria. O sistema é Não - Holonômico, portanto, o planejamento do caminho é extremamente difícil, bem como impreciso. Não há atuadores direcionais diretos
Portanto, é melhor usar o acionamento diferencial devido à sua simplicidade e facilidade de uso.
Etapa 2:controle dos motores
Para controlar o motor, precisamos de algo chamado de driver do motor.
O que é um driver de motor?
Um driver de motor é um pequeno amplificador de corrente; a função dos drivers de motor é pegar um sinal de controle de baixa corrente e então transformá-lo em um sinal de alta corrente que pode acionar um motor.
Existem muitos drivers de motor dos quais estou usando o módulo de driver de motor l293d.
L293D é um circuito integrado de driver de motor que é usado para acionar motores CC girando em qualquer direção. É um CI de 16 pinos que pode controlar um conjunto de dois motores DC simultaneamente. O L293D usa 5 V para sua própria alimentação e uma fonte de alimentação externa é necessária para acionar os motores, que podem ser de até 36 V e consumir até 600 mA. O L293D trabalha com o conceito de ponte H típica, um circuito que permite que a alta tensão flua em qualquer direção. Em um único L293D IC, há dois circuitos em ponte H que podem girar dois motores CC independentemente.
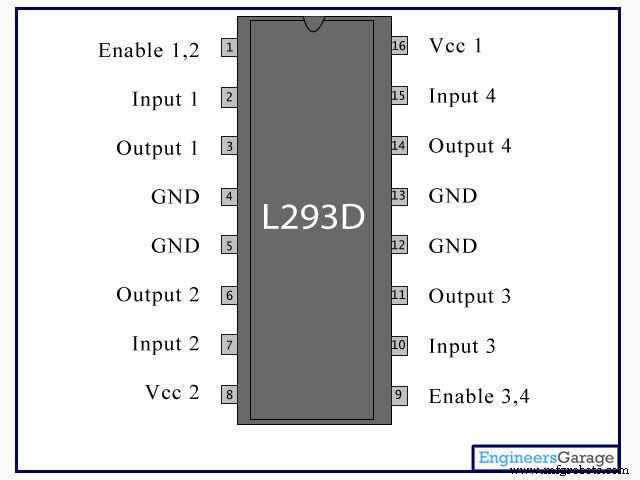
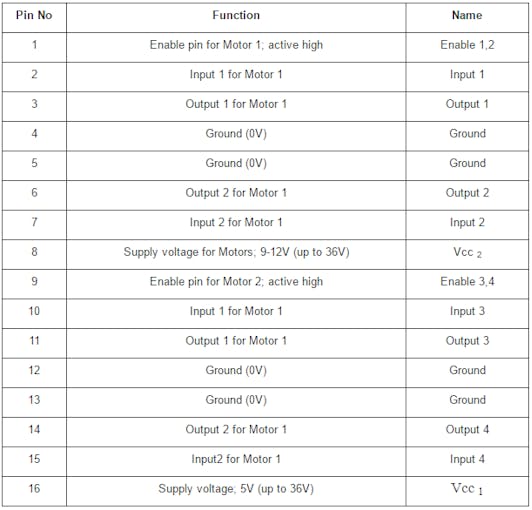
Descrição do pino de L293d
1Ative o pino para o Motor 1; ativo alto Ativar 1,2 2 Entrada 1 para Motor 1 Entrada 1 3 Saída 1 para Motor 1 Saída 1 4 Terra (0V) Terra 5 Terra (0V) Terra 6 Saída 2 para Motor 1 Saída 2 7 Entrada 2 para Motor 1 Entrada 2 8 Tensão de alimentação para motores; 9-12 V (até 36 V) Vcc 2 9 Pino de habilitação para Motor 2; ativo alto Habilitar 3,4 10 Entrada 1 para Motor 1 Entrada 3 11 Saída 1 para Motor 1 Saída 3 12 Terra (0V) Terra 13 Terra (0V) Terra 14 Saída 2 para Motor 1 Saída 4 15 Entrada 2 para Motor 1 Entrada 4 16 Tensão de alimentação; 5V (até 36V) Vcc 1
Etapa 3:sobre o aplicativo
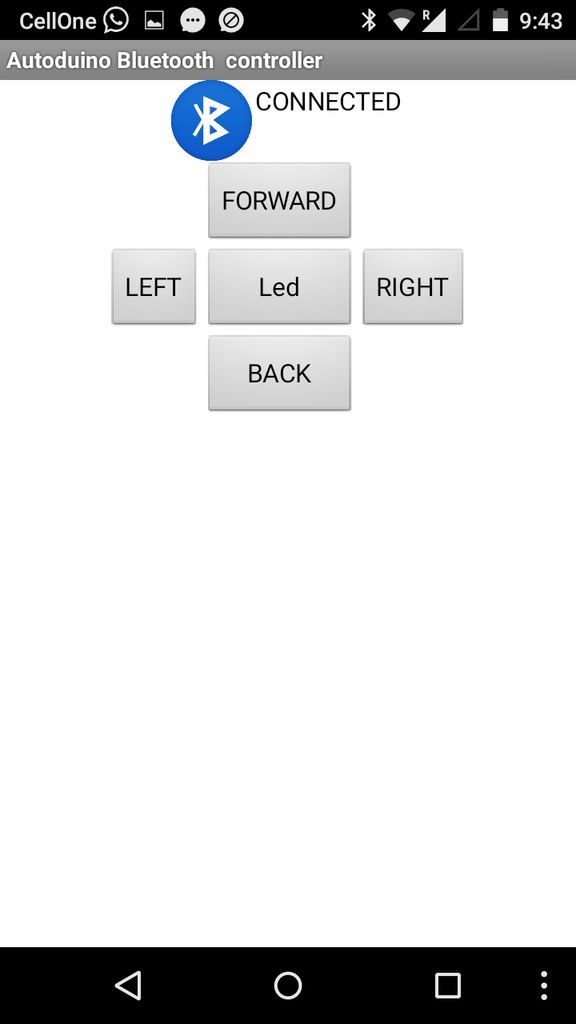


Existem muitos aplicativos para controlar que fiz com um. A lógica é muito simples todo o botão envia um caractere quando pressionado via Bluetooth e o arduino o processa.
Funções de caracteres
X Estado nulo F Movimento para frente B Movimento para trás L Vire à esquerda R Vire à direita
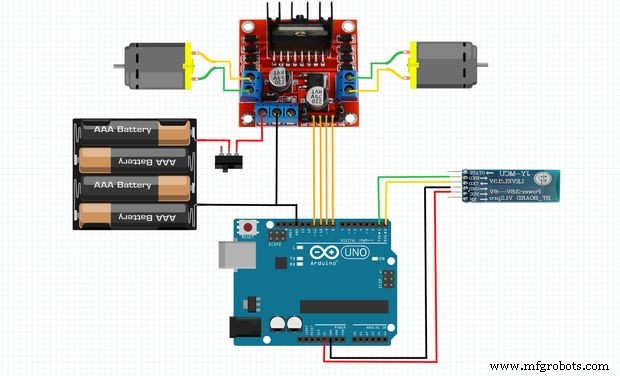
Etapa 4:conexão de toda a parte
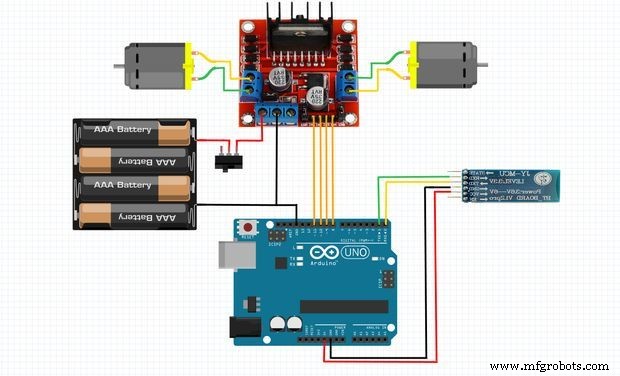

As conexões são simples
aqui estão as conexões como segue
O Módulo Bluetooth
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
O Motorista
Motor Driver Arduino pino 2 8 pino 7 7 pino 10 6 pino 4 9 pino 3 e 6 Motor 1 pino 11 e pino 14 Motor 2 pino 1 5v pino 9 5v
Etapa 5:codificação


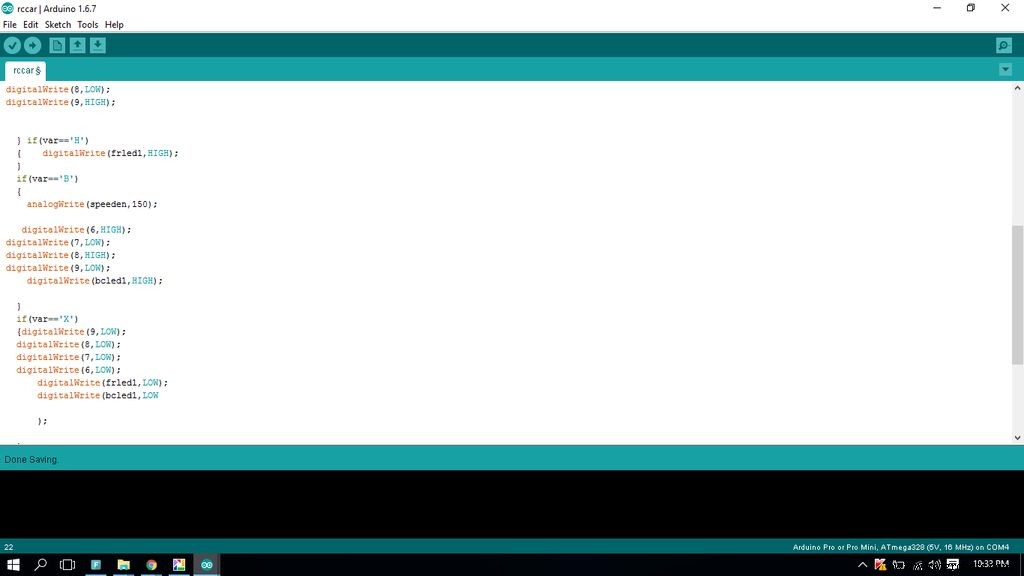
void setup () {Serial.begin (9600); pinMode (8, OUTPUT); pinMode (7, OUTPUT); pinMode (9, OUTPUT); pinMode (6, OUTPUT); pinMode (5, SAÍDA); pinMode (4, SAÍDA); digitalWrite (4, BAIXO); digitalWrite (5, LOW);} // a função de loop é executada continuamente forevervoid loop () {var =Serial.read (); if (var =='F') {digitalWrite (6, LOW); digitalWrite ( 7, HIGH); digitalWrite (8, LOW); digitalWrite (9, HIGH);} if (var =='H') {digitalWrite (frled1, HIGH);} if (var =='B') {analogWrite ( speeden, 150); digitalWrite (6, ALTO); digitalWrite (7, BAIXO); digitalWrite (8, ALTO); digitalWrite (9, BAIXO); digitalWrite (bcled1, HIGH);} if (var =='X') {digitalWrite (9, LOW); digitalWrite (8, LOW); digitalWrite (7, LOW); digitalWrite (6, LOW); digitalWrite (frled1, LOW); digitalWrite (bcled1, LOW);} if (var =='L') {digitalWrite (6, LOW); digitalWrite (7, LOW); digitalWrite (8, HIGH); digitalWrite (9, LOW);} if (var =='R') {digitalWrite (6, ALTO); digitalWrite (7, BAIXO); digitalWrite (8, BAIXO); digitalWrite (9, BAIXO);;}} Espero que você goste de fazer o projeto como eu fiz. Estou postando mais alguns projetos legais em breve, então me siga para obter todas as atualizações. Curta também minha página https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
Código
- Snippet de código # 1
Snippet de código # 1 Texto simples
configuração vazia () {Serial.begin (9600); pinMode (8, SAÍDA); pinMode (7, SAÍDA); pinMode (9, SAÍDA); pinMode (6, SAÍDA); pinMode (5, SAÍDA); pinMode (4, SAÍDA); digitalWrite (4, BAIXO); digitalWrite (5, LOW);} // a função de loop é executada continuamente forevervoid loop () {var =Serial.read (); if (var =='F') {digitalWrite (6, BAIXO); digitalWrite (7, ALTO); digitalWrite (8, BAIXO); digitalWrite (9, ALTO); } if (var =='H') {digitalWrite (frled1, HIGH); } if (var =='B') {analogWrite (speeden, 150); digitalWrite (6, ALTO); digitalWrite (7, BAIXO); digitalWrite (8, ALTO); digitalWrite (9, BAIXO); digitalWrite (bcled1, HIGH); } if (var =='X') {digitalWrite (9, LOW); digitalWrite (8, BAIXO); digitalWrite (7, BAIXO); digitalWrite (6, BAIXO); digitalWrite (frled1, LOW); digitalWrite (bcled1, LOW); } if (var =='L') {digitalWrite (6, LOW); digitalWrite (7, LOW); digitalWrite (8, HIGH); digitalWrite (9, LOW); } if (var =='R') {digitalWrite (6, HIGH); digitalWrite (7, LOW); digitalWrite (8, LOW); digitalWrite (9, LOW);; }} Esquemas
Processo de manufatura
- Construtor C#
- Transforme seu Raspberry Pi em um Hamster Fitness Tracker
- Seu smartphone e o carro conectado
- Como transformar sua cadeia de suprimentos em um centro de lucro
- Como transformar seus designs criativos em reais?
- Como consertar seu carro AC em poucos passos
- Como escolher um turbocompressor para o seu carro?
- Como consertar a maçaneta da porta do seu carro
- Como recarregar o ar condicionado do carro
- Como reparar a ferrugem no seu carro?