


Com IA, exoesqueletos robóticos ganham autocontrole
Pesquisadores de robótica estão desenvolvendo pernas de exoesqueleto que dão seus passos por conta própria, usando tecnologia sofisticada de inteligência artificial (IA). As pernas autocontroladas podem um dia apoiar os movimentos de idosos e pessoas com deficiências físicas.
O sistema, construído e testado por pesquisadores da Universidade de Waterloo, combina visão computacional e IA de aprendizado profundo. para imitar uma marcha humana. "Aprendendo" a partir de uma coleção de passeios de amostra em torno de um ambiente, o sistema ajusta seus movimentos com base no ambiente que detecta.
“Estamos dando visão aos exoesqueletos robóticos para que eles possam se controlar”, disse Brokoslaw Laschowski , doutorando em engenharia de projeto de sistemas que lidera um projeto de pesquisa da Universidade de Waterloo chamado ExoNet .
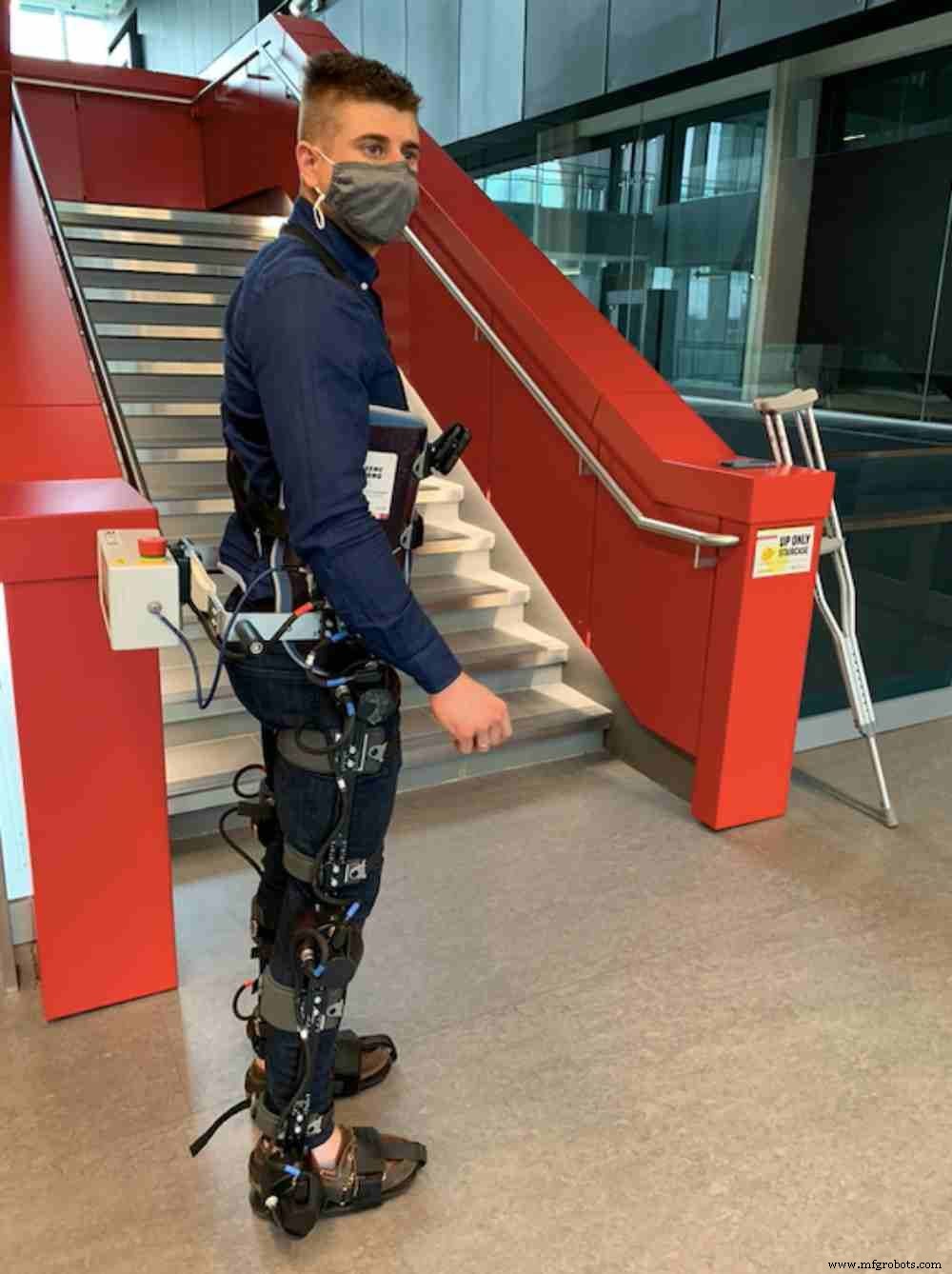
O sistema ExoNet, suportado por inteligência artificial, extrai dados de treinamento coletados pela equipe. Com câmeras vestíveis presas ao peito (como mostrado na imagem acima), Laschowski e seus colegas pesquisadores gravaram vídeos de ambientes internos e externos.
IA o software de computador então processou o feed de vídeo para reconhecer com precisão escadas, portas e outros recursos nos arredores.
A conquista foi detalhada na revista Frontiers in Robotics and AI . (Explore um conjunto de dados de pesquisa relacionados a este projeto autônomo de exoesqueleto.)
O mais recente de uma série de artigos sobre os projetos relacionados, Simulação de Biomecânica Stand-to-Sit para Exoesqueletos Robóticos e Próteses com Regeneração de Energia , aparece na revista IEEE Transactions on Medical Robotics and Bionics.
Pernas de exoesqueleto motorizadas foram projetadas antes, mas o usuário quase sempre exigia um joystick ou aplicativo de smartphone para controlar seus movimentos.
Mais robôs em resumos técnicos
Um robô que está sendo desenvolvido na Universidade de Tel Aviv “ouve” sinais elétricos, graças a um sensor natural:a orelha de um gafanhoto morto.
Um novo robô não precisa de eletrônicos para se mover - apenas uma fonte constante de ar pressurizado.
“Isso pode ser inconveniente e cognitivamente exigente”, disse Laschowski. “Toda vez que você deseja realizar uma nova atividade locomotora, é preciso parar, retirar o smartphone e selecionar o modo desejado.”
A abordagem da Universidade de Waterloo oferece um controle mais automatizado, graças ao A.I. e capacidades de visão computacional.
A próxima fase do projeto de pesquisa ExoNet envolverá o envio de instruções aos motores para que os exoesqueletos robóticos possam subir escadas, evitar obstáculos ou tomar outras ações apropriadas com base na análise do movimento atual do usuário e do terreno próximo.
Além disso, os pesquisadores também estão trabalhando para melhorar a eficiência energética dos motores para exoesqueletos robóticos usando o movimento humano para auto-carregar as baterias.
“Nossa abordagem de controle não exigiria necessariamente pensamento humano”, disse Laschowski, que é supervisionado pelo professor de engenharia John McPhee , o Canada Research Chair in Biomechatronic System Dynamics, em seu Motion Research Group laboratório. “Semelhante aos carros autônomos que dirigem sozinhos, estamos projetando exoesqueletos autônomos que andam sozinhos.”
Em uma sessão de perguntas e respostas com Resumos técnicos abaixo, Brokoslaw Laschowski explica mais sobre a tecnologia ExoNet e por que um exoesqueleto que possui recursos semelhantes a um carro autônomo também deve incluir medidas de segurança semelhantes a veículos.
Resumos técnicos : Como você garante a segurança? O usuário pode assumir o controle se o exoesqueleto estiver fazendo algo perigoso por engano? A analogia é ADAS vs veículos completamente autônomos. Como o usuário controlaria a velocidade e as paradas e partidas? Como esses controles interagiriam com o usuário?
Brokoslaw Laschowski :A segurança é a maior importância. Esses dispositivos robóticos são projetados para ajudar idosos e pessoas com deficiências físicas (por exemplo, acidente vascular cerebral, lesão na medula espinhal, paralisia cerebral, osteoartrite, etc). Não podemos permitir que o exoesqueleto tome decisões erradas e potencialmente cause quedas ou lesões. Consequentemente, estamos nos concentrando inteiramente em melhorar a precisão e o controle da classificação, desenvolvendo um sistema de reconhecimento de ambiente para permitir que o exoesqueleto detecte e reaja de forma autônoma em tempo real ao ambiente de caminhada. Estamos otimizando o desempenho do sistema usando computadores e protótipos vestíveis com controles “saudáveis” antes dos testes clínicos. No entanto, o usuário do exoesqueleto sempre terá a capacidade de assumir o controle manual (por exemplo, parar e dirigir).
Resumos técnicos :Você pode me mostrar um aplicativo que você imagina para esse tipo de exoesqueleto? Onde isso será mais valioso?
Brokoslaw Laschowski :Esses dispositivos robóticos são projetados para auxiliar idosos e pessoas com deficiência física nas atividades locomotoras. Um exemplo de aplicação do nosso sistema de controle automatizado adaptável ao ambiente é alternar entre diferentes atividades locomotoras. Em exoesqueletos disponíveis comercialmente, ao fazer a transição para andar no nível do solo para subir escadas, por exemplo, o usuário se aproxima da escada, para e comunica manualmente ao exoesqueleto a atividade pretendida usando uma interface móvel, botões ou outros controles manuais (dependendo do dispositivo).
Em contraste, com um sistema de controle autônomo, à medida que o usuário se aproxima de uma escada inclinada, sensores a bordo, como unidades de medição inercial (IMUs), estão continuamente detectando e classificando os movimentos atuais do usuário, e o sistema de câmera vestível está detectando e classificando o próximo terreno. A fusão dessas diferentes tecnologias de sensores e algoritmos de reconhecimento de padrões é usada para prever a intenção locomotora do usuário e controlar o exoesqueleto.
Resumos técnicos :Como o exoesqueleto é “treinado” para operar sem o pensamento humano?
Brokoslaw Laschowski :Usamos visão computacional e aprendizado profundo para classificação de ambientes. Usando milhões de imagens do mundo real, nossas redes neurais convolucionais são treinadas de forma automática e eficiente para prever os diferentes ambientes de caminhada mostrados nas imagens. Essas informações sobre o ambiente de caminhada são posteriormente usadas para controlar o exoesqueleto robótico em termos de planejamento de caminho ideal, prevenção de obstáculos e alternância entre diferentes atividades locomotoras (por exemplo, andar no nível do solo para subir escadas).
Resumos técnicos :O que vem a seguir para este exoesqueleto? No que você está trabalhando agora?
Brokoslaw Laschowski :De uma perspectiva crítica de segurança, esses sistemas de controle de exoesqueleto alimentados por IA precisam funcionar com precisão e em tempo real. Portanto, estamos nos concentrando em melhorar a precisão da classificação do ambiente ao usar arquiteturas de rede neural com requisitos mínimos de armazenamento computacional e de memória para promover inferência em tempo real integrada.
O que você acha? Compartilhe suas perguntas e comentários.
Sensor
- Ganhe controle sobre sua produção com planejamento de capacidade eficaz
- Controle de acesso com QR, RFID e verificação de temperatura
- Melhorando o controle de qualidade com o ciclo de Deming
- Melhor controle de qualidade com peças impressas em 3D
- Como controlar sistemas robóticos de transferência com sensores de distância a laser
- Aceitar moeda de controle com Arduino
- Automação do controle de qualidade com a ajuda da tecnologia
- Torno com CNC
- Método de medição testa ajuste de exoesqueletos
- Exoesqueleto robótico da parte superior do corpo